Предлагаемое техническое решение относится к оборонной технике и применяется в зенитно-ракетных комплексах (ЗРК).
Известна передвижная установка, оборудованная многоствольным пусковым ракетным устройством (см. патент DE N 2356462, МПК F 41 G 07/00, 1976, патентовладелец - CH, автор - Э. Бауманн), содержащая радиолокатор, систему наведения и целеуказания, аппаратуру вычисления и управления, антенны поиска, сопровождения и передачи команд управления на ракету.
Передвижная боевая установка из транспортного положения приводится в боевое состояние подъемом радиолокационной башни.
Недостаток этого технического решения заключается в малой дальности обнаружения низколетящих целей и невозможности работы в лесистой местности из-за малой высоты подъема антенны.
Известен ЗРК "Фаворит", представляющий дальнейшее развитие комплекса С-300ПМУ1 (см. Техника и вооружение, 1997, N 10, стр. 33-36), содержащий РЛС подсвета и наведения (РПН) - размещенную на вышке, благодаря которой РЛС поднимается на определенную высоту и может работать при скорости ветра до 25 м/сек.
Вышка и РЛС размещены на колесном тягаче с прицепом. Вышка представляет собой жесткую стальную трубу, причем время развертывания из походного положения с проведением необходимого горизонтирования составляет 4 часа.
Обеспечение высоких точностных характеристик ЗРК "Фаворит" производится за счет предварительного горизонтирования и повышенной жесткости конструкции вышки, что увеличивает вес, время развертывания и свертывания, ухудшает мобильность и невозможность перевоза воздушным транспортом.
Наиболее близким по технической сущности и достигаемому результату является самоходная установка разведки и наведения, входящая в самоходный ЗРК "Куб" (см. Техника и вооружение, 1999, N 5 и 6, стр. 28-34).
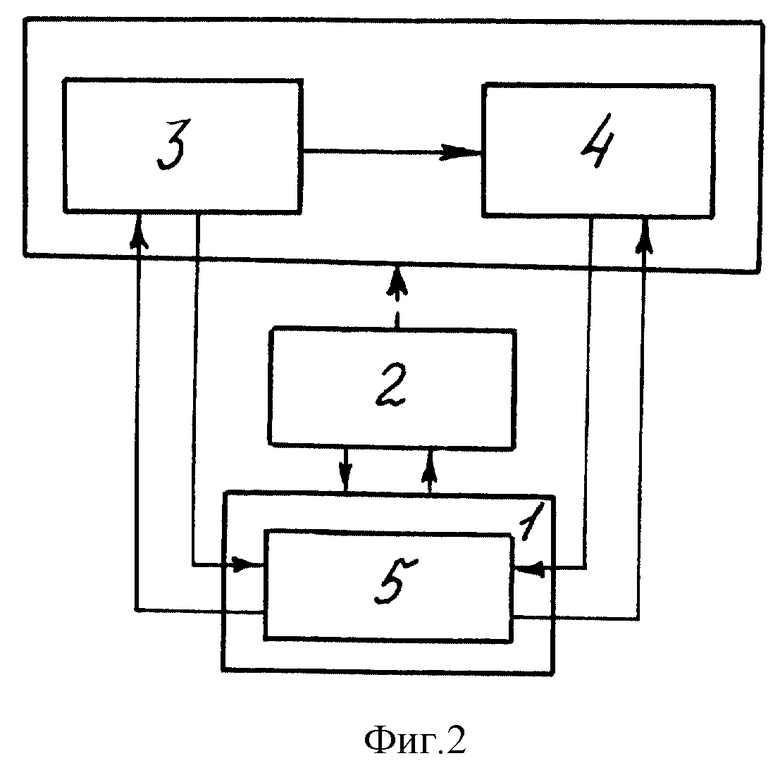
На фиг. 1, 2 соответственно изображены структура известного технического решения и функциональная блок-схема самоходной установки разведки и наведения.
На гусеничной машине 1 с системой обработки и передачи информации 5 размещена система горизонтирования 2, на которой расположена РЛС обнаружения 3 с параболической антенной 7, высокочастотной частью приемно-передающего канала радиолокационной системы 8 и РЛС сопровождения и подсвета целей 4.
Перед началом боевой работы производится топопривязка к местности средств ЗРК, а антенны раскладываются и разворачиваются в боевое положение. Затем производится горизонтирование антенных постов и самоходная установка разведки и наведения готова к боевой работе. Время готовности 5 минут.
Недостатком известного технического решения является малая дальность обнаружения низколетящих целей из-за малой высоты подъема антенн над землей и невозможность работы в лесистой местности.
Техническим результатом предлагаемого технического решения является создание мобильной радиолокационной установки подсвета и наведения зенитно-ракетного комплекса средней дальности действия, обеспечивающего обнаружение низколетящих целей при работе в лесистой местности при средней высоте европейского леса не более девятнадцати метров.
Технический результат достигается тем, что мобильная радиолокационная установка подсвета и наведения зенитно-ракетного комплекса средней дальности действия, содержащая канал обзора с радиолокационной системой, передающий канал подсвета сопровождаемых целей и систему обработки и передачи информации, размещенную на самоходной машине, отличается тем, что она снабжена единой для каналов обзора и подсвета фазированной антенной решеткой, датчиками углов курса, крена и тангажа, антенным постом, теллескопическим подъемно-поворотным устройством, выполненным с возможностью вращения, системой управления лучом фазированной антенной решетки, системой управления телескопическим подъемно-поворотным устройством по азимуту и высоте, причем физированная антенная решетка, датчики углов курса, крена и тангажа установлены на антенном посту, расположенном в верхней части телескопического подъемно-поворотного устройства, а система обработки и передачи информации совмещена с системой управления лучом фазированной антенной решетки, при этом фазированная антенная решетка подключена своими входами и выходами соответственно к высокочастотной части приемно-передающего канала радиолокационной системы и передающему каналу подсвета сопровождаемых целей, входы и выходы системы обработки и передачи информации и системы управления лучом фазированной антенной решетки соединены соответственно с выходами датчиков углов курса, крена и тангажа, выходом высокочастотной части приемно-передающего канала радиолокационной системы и с вторым входом высокочастотной части приемно-передающего канала радиолокационной системы, входом передающего канала подсвета сопровождаемых целей и шиной связи с фазированной антенной решеткой, а выход системы управления телескопическим подъемно-поворотным устройством по азимуту и высоте антенного поста соединен с входом вращающегося телескопического подъемно-поворотного устройства.
Сущность предлагаемого технического решения при подъеме радиолокационной системы над землей заключается во введении датчика курса, крена и тангажа, выполненного на основе авиационного гироскопа гиро-курсо-вертикали ИКВ-1, что позволяет с достаточно высокой степенью стабилизировать положения луча антенны. В процессе работы антенный пост, в котором расположена радиолокационная система с антенной, имеет продольные и поперечные отклонения от установившегося состояния, которые меняют положение луча антенны в пространстве, уводя его от цели. Для возвращения луча в прежнее положение в устройстве управления формируются сигналы, пропорциональные продольному и поперечному отклонению антенного поста, кроме того, увеличивается дальность обнаружения низколетящих целей и возможность организации противовоздушной обороны в лесистой местности, причем для подъема радиолокационной системы используется трехзвенное телескопическое подъемное устройство от крана КС-4572, обладающее малыми габаритами в походном положении, малым весом конструкции, быстротой подъема и складывания (2-3 мин), что в конечном итоге повышает мобильность самоходной установки.
Перевод установки из походного положения в боевое и разворот в требуемое азимутальное направление производится с помощью гидравлических приводов системы управления телескопического подъемно-поворотного устройства.
Сравнение предлагаемого решения с известными техническими решениями показывает, что оно обладает новой совокупностью существенных признаков, которые позволяют успешно реализовать поставленную цель.
Сущность предлагаемого технического решения будет понятна из следующего описания и приложенного к нему графического материала.
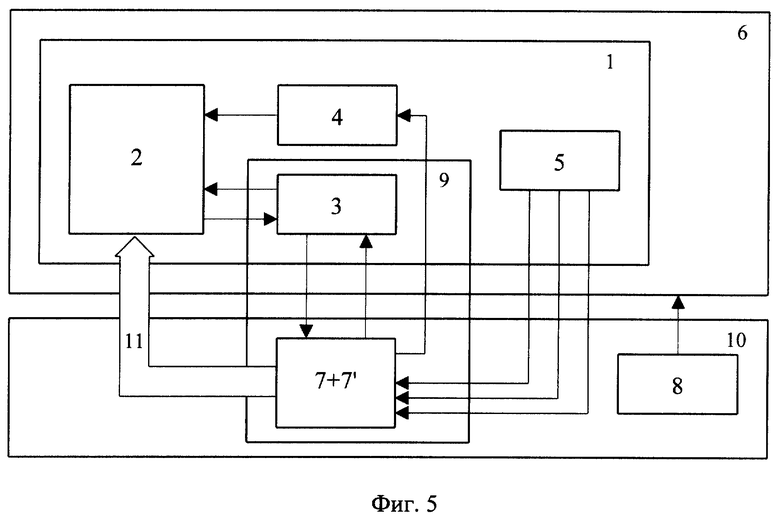
На фиг. 3, 4 и 5 изображены структура и функциональная блок-схема мобильной радиолокационной установки подсвета и наведения, где
1 - антенный пост на телескопическом подъемно-поворотном устройстве,
2 - фазированная антенная решетка,
3 - высокочастотная часть приемно-передающего канала радиолокационной системы,
4 - передающий канал подсвета.
5 - датчики углов курса, крена и тангажа антенного поста,
6 - телескопическое подъемно-поворотное устройство,
7 - система обработки и передачи информации,
7' - система управления лучом диаграммы направленности фазированной антенной решетки,
8 - система управления телескопическим подъемно-поворотным устройством,
9 - канал обзора с радиолокационной системой,
10 - самоходная машина,
11 - шина связи с физированной антенной решеткой.
Система размещена на самоходном гусеничном шасси (колесном прицепе), сверху которого находится погон, на котором расположено вращающееся телескопическое подъемно-поворотное устройство 6, в верхней части которого на конце телескопической стрелы закреплен антенный пост 1, содержащий ФАР 2, высокочастотную часть приемно-передающего канала радиолокационной системы 3, передающий канал подсвета 4 и датчики углов курса, крена и тангажа антенного поста 5, ниже которого размещена система обработки и передачи информации 7 и система управления лучом диаграммы направленности ФАР 7', а также система управления телескопическим подъемно-поворотным устройством 8.
Установка работает следующим образом.
В походном положении производится топопривязка к местности и вводится курс гусеничной машины (прицепа) в авиационную гиро-курсо-вертикаль 5, используемую в качестве гироскопических датчиков положения антенного поста. Через пять минут после включения питания, когда прогреется вся аппаратура и раскрутятся гироскопы, производится разворот телескопического подъемно-поворотного устройства 6 в горизонтальной плоскости на заданный курс и одновременный подъем путем телескопирования антенного поста 1 на одно, два или три положения в зависимости от местности в течение двух минут, и, таким образом, максимум через семь минута мобильная радиолокационная установка подсвета и наведения готова к работе. Разворот производится с помощью гидравлического привода и телескопирование с использованием телескопической стрелы подъемного крана КС-4572.
Углы поворота телескопического подъемно-поворотного устройства, а также колебания антенного поста по крену и тангажу или скрутка антенного поста по курсу от действия ветра со скоростью до 30 м/сек, снимаемые с гиро-курсо-вертикали, учитываются в системе обработки информации и управления лучом диаграммы направленности ФАР, обеспечивая стабильность положения луча диаграммы направленности антенны в пространстве и правильность выдаваемых координат сопровождаемых и подсвечиваемых целей.
Предлагаемое техническое решение позволяет:
- обеспечить массу мобильной радиолокационной установки не более 35-36 тонн;
- обеспечить ее готовность к работе через 7 минут после включения системы автономного питания;
- обеспечить организацию ПВО при работе в лесистой местности или при препятствиях, создающих "угол закрытия";
- повысить мобильность и передвижение по шоссейным и грунтовым дорогам;
- обеспечить транспортировку по железной дороге и с помощью самолета АН-22.
| название | год | авторы | номер документа |
|---|---|---|---|
| САМОХОДНАЯ ОГНЕВАЯ УСТАНОВКА ОБНАРУЖЕНИЯ, СОПРОВОЖДЕНИЯ И ПОДСВЕТА ЦЕЛЕЙ, НАВЕДЕНИЯ И ПУСКА РАКЕТ ЗЕНИТНОГО РАКЕТНОГО КОМПЛЕКСА СРЕДНЕЙ ДАЛЬНОСТИ | 2002 |
|
RU2208213C1 |
| МОБИЛЬНАЯ РАДИОЛОКАЦИОННАЯ УСТАНОВКА ПОДСВЕТА И НАВЕДЕНИЯ ЗЕНИТНО-РАКЕТНОГО КОМПЛЕКСА СРЕДНЕЙ ДАЛЬНОСТИ | 2007 |
|
RU2330307C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ОБНАРУЖЕНИЯ ЦЕЛЕЙ, ПОДСВЕТА СОПРОВОЖДАЕМЫХ ЦЕЛЕЙ И НАВЕДЕНИЯ РАКЕТ ЗЕНИТНО-РАКЕТНОГО КОМПЛЕКСА СРЕДНЕЙ ДАЛЬНОСТИ ДЕЙСТВИЯ | 2007 |
|
RU2343394C1 |
| САМОХОДНАЯ ОГНЕВАЯ УСТАНОВКА ОБНАРУЖЕНИЯ, СОПРОВОЖДЕНИЯ И ПОДСВЕТА ЦЕЛЕЙ, НАВЕДЕНИЯ И ПУСКА РАКЕТ ЗЕНИТНОГО РАКЕТНОГО КОМПЛЕКСА СРЕДНЕЙ ДАЛЬНОСТИ | 2012 |
|
RU2521889C1 |
| САМОХОДНАЯ ОГНЕВАЯ УСТАНОВКА ОБНАРУЖЕНИЯ, СОПРОВОЖДЕНИЯ И ПОДСВЕТА ЦЕЛЕЙ, НАВЕДЕНИЯ И ПУСКА РАКЕТ ЗЕНИТНОГО РАКЕТНОГО КОМПЛЕКСА СРЕДНЕЙ ДАЛЬНОСТИ | 2007 |
|
RU2333450C1 |
| МОБИЛЬНЫЙ ЗЕНИТНЫЙ РАКЕТНЫЙ КОМПЛЕКС | 2003 |
|
RU2253820C2 |
| САМОХОДНАЯ ОГНЕВАЯ УСТАНОВКА ОБНАРУЖЕНИЯ, СОПРОВОЖДЕНИЯ И ПОДСВЕТА ЦЕЛЕЙ, НАВЕДЕНИЯ И ПУСКА РАКЕТ ЗЕНИТНОГО РАКЕТНОГО КОМПЛЕКСА СРЕДНЕЙ ДАЛЬНОСТИ | 2012 |
|
RU2518389C1 |
| САМОХОДНАЯ ОГНЕВАЯ УСТАНОВКА ОБНАРУЖЕНИЯ, СОПРОВОЖДЕНИЯ И ПОДСВЕТА ЦЕЛЕЙ, НАВЕДЕНИЯ И ПУСКА РАКЕТ С ПОЛУАКТИВНЫМИ РАДИОЧАСТОТНЫМИ ГОЛОВКАМИ САМОНАВЕДЕНИЯ ЗЕНИТНОГО РАКЕТНОГО КОМПЛЕКСА СРЕДНЕЙ ДАЛЬНОСТИ | 2008 |
|
RU2363911C1 |
| ОГНЕВАЯ СЕКЦИЯ | 2003 |
|
RU2229668C1 |
| Многофункциональная РЛС самоходной огневой установки зенитного ракетного комплекса средней дальности действия | 2019 |
|
RU2714993C1 |


Изобретение относится к оборонной технике и применяется в зенитно-ракетных комплексах (ЗРК). Технический результат - обеспечение обнаружения низколетящих целей при работе в лесистой местности при средней высоте европейского леса не более девятнадцати метров. Технический результат достигается тем, что в мобильную радиолокационную установку подсвета и наведения зенитно-ракетного комплекса средней дальности действия, содержащую радиолокационную систему, передающий канал подсвета сопровождаемых целей и систему обработки и передачи информации, размещенную на самоходной машине, введен антенный пост, расположенный в верхней части вращающегося телескопического подъемно-поворотного устройства. Антенный пост содержит единую для каналов обзора и подсвета фазированную антенную решетку, подключенную своими входами и выходами соответственно к высокочастотной части приемно-передающего канала радиолокационной системы и передающему каналу подсвета сопровождаемых целей, а также датчики углов курса, крена и тангажа. Кроме того, система обработки и передачи информации совмещена с системой управления лучом фазированной антенной решетки, причем входы и выходы системы обработки и передачи информации и системы управления лучом фазированной антенной решетки связаны соответственно с выходами датчиков углов курса, крена и тангажа, выходом высокочастотной части приемно-передающего канала радиолокационной системы и с вторым входом высокочастотной части приемно-передающего канала радиолокационной системы, входом передающего канала подсвета сопровождаемых целей и шиной связи с фазированной антенной решеткой. Выход системы управления телескопическим подъемно-поворотным устройством по азимуту и высоте антенного поста соединен с входом вращающегося телескопического подъемно-поворотного устройства. 5 ил.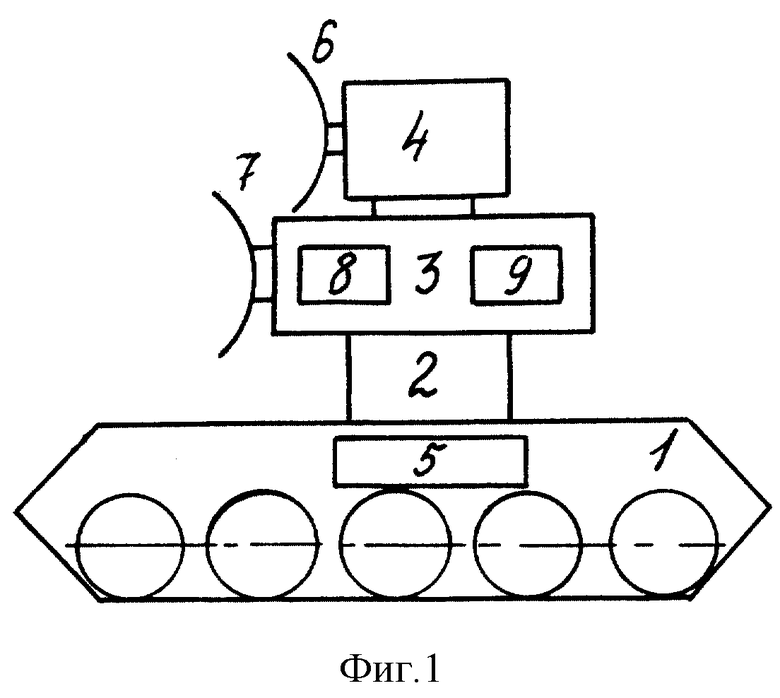
Мобильная радиолокационная установка подсвета и наведения зенитно-ракетного комплекса средней дальности действия, содержащая канал обзора с радиолокационной системой, передающий канал подсвета сопровождаемых целей и систему обработки и передачи информации, размещенную на самоходной машине, отличающаяся тем, что она снабжена единой для каналов обзора и подсвета фазированной антенной решеткой, датчиками углов курса, крена и тангажа, антенным постом, телескопическим подъемно-поворотным устройством, выполненным с возможностью вращения, системой управления лучом фазированной антенной решетки, системой управления телескопическим подъемно-поворотным устройством по азимуту и высоте, причем фазированная антенная решетка, датчики углов курса, крена и тангажа установлены на антенном посту, расположенном в верхней части телескопического подъемно-поворотного устройства, а система обработки и передачи информации совмещена с системой управления лучом фазированной антенной решетки, при этом фазированная антенная решетка подключена своими входами и выходами соответственно к высокочастотной части приемно-передающего канала радиолокационной системы и передающему каналу подсвета сопровождаемых целей, входы и выходы системы обработки и передачи информации и системы управления лучом фазированной антенной решетки соединены соответственно с выходами датчиков углов курса, крена и тангажа, выходом высокочастотной части приемно-передающего канала радиолокационной системы и с вторым входом высокочастотной части приемно-передающего канала радиолокационной системы, входом передающего канала подсвета сопровождаемых целей и шиной связи с фазированной антенной решеткой, а выход системы управления телескопическим подъемно-поворотным устройством по азимуту и высоте антенного поста соединен с входом вращающего телескопического подъемно-поворотного устройства.
| Зенитно-ракетный комплекс "Куб" | |||
| Техника и вооружение, 1999, № 5 и 6, с | |||
| Видоизменение прибора с двумя приемами для рассматривания проекционные увеличенных и удаленных от зрителя стереограмм | 1919 |
|
SU28A1 |
| US 3946640, 30.03.1976 | |||
| СПОСОБ И УСТРОЙСТВО ОТРИСОВКИ ГРАФИЧЕСКОГО ИНТЕРФЕЙСА ПОЛЬЗОВАТЕЛЯ | 2015 |
|
RU2659731C2 |
| US 5131602 A, 21.07.1992 | |||
| US 5372334 A, 13.12.1994 | |||
| УСТРОЙСТВО НАВЕДЕНИЯ СНАРЯДА | 1996 |
|
RU2100746C1 |

