Предлагаемое изобретение относится к области оборонной техники, в частности к мобильным зенитным ракетным комплексам (ЗРК), и может быть использовано для организации противовоздушной обороны войск и военных объектов от поражения средствами воздушного нападения противника.
Известна «Самоходная огневая установка обнаружения, сопровождения и подсвета целей, наведения и пуска ракет зенитного ракетного комплекса средней дальности» (RU 2208213 C1, опубл. 10.07.2003 г. МПК F41F 03/04, F41G 7/00), она содержит фазированную антенную решетку, радиолокационную станцию, поворотную пусковую установку с ракетами и датчиком угла поворота, цифровую вычислительную систему, гироскопическую систему измерения углов курса, крена и тангажа, необходимую для электронной стабилизации луча фазированной антенной решетки, а также систему навигации, топопривязки и ориентирования, систему сравнения и запоминания углов гироскопической системы и систему коррекции временной нестабильности гироскопической системы измерения углов. Выход гироскопической системы подключен к объединенным входам системы сравнения и запоминания и системы коррекции временной нестабильности гироскопической системы, причем система навигации, топопривязки и ориентирования связана соответственно с входом гироскопической системы и со вторым входом системы сравнения и запоминания. Выход датчика угла поворота пусковой установки соединен с третьим входом системы сравнения и запоминания, выход которой через систему коррекции временной нестабильности гироскопической системы подключен к центральной вычислительной системе, выходная шина которой связана с фазированной антенной решеткой.
Известна также «Самоходная огневая установка обнаружения, сопровождения и подсвета целей, наведения и пуска зенитных управляемых ракет» (RU 2223459 C1, опубл. 10.02.2004 г. МПК F41F 03/04, F41F 7/00), содержащая последовательно соединенные антенную систему, радиолокационную станцию, цифровую вычислительную систему, поворотную пусковую установку для N ракет, устройство стартовой автоматики для ракет с полуактивными радиолокационными головками самонаведения, К ракет с полуактивными радиолокационными головками самонаведения, а также систему распознавания, связанную шинами с радиолокационной станцией и цифровой вычислительной системой, формирователь команды для пуска ракет и систему навигации, топопривязки и ориентирования, выход которой подключен к третьему входу цифровой вычислительной системы, вторая выходная шина которой связана с входом антенной системы. Кроме того, последовательно соединенные шиной связи устройство стартовой автоматики для ракет с активной радиолокационной головкой самонаведения и N-K зенитных управляемых ракет с активными радиолокационными головками самонаведения, логическое устройство для выбора типа пускаемой ракеты и логическое устройство для формирования команды на выключение излучения радиолокационной станции. При этом вход устройства стартовой автоматики для ракет с активной радиолокационной головкой самонаведения связан шиной со вторым выходом поворотной пусковой установки. Первый выход системы распознавания подключен через логическое устройство для выбора типа ракет соответственно к входам устройств стартовой автоматики для ракет с полуактивными радиолокационными головками самонаведения и для ракет с активными радиолокационными головками самонаведения. Первый и второй выходы формирователя команды для пуска ракет соединены соответственно со вторым входом логического устройства для выбора типа ракеты и через логическое устройство для формирования команды на выключение излучения радиолокационной станции - со вторым входом радиолокационной станции. Второй выход системы распознавания подключен ко второму входу логического устройства для формирования команды на выключение излучения радиолокационной станции.
Известна «Самоходная огневая установка» (RU 2208213 U1, опубл. 27.02.2012 г. МПК F41F 03/04, F41G 7/00). Она содержит фазированную антенную решетку, радиолокационную станцию, пусковую установку с ракетами и цифровую вычислительную систему. Выход фазированной антенной решетки соединен с первым входом радиолокационной станции, а также передатчик подсвета целей и ракеты и блок автоматизированного фазирования антенны, причем вход-выход цифровой вычислительной системы подключен ко второму входу-выходу радиолокационной станции, вход-выход пусковой установки подключен к первому входу-выходу радиолокационной станции, выход цифровой вычислительной системы соединен со входом блока автоматизированного фазирования антенны, выход которого подключен ко второму входу фазированной антенной решетки, выход радиолокационной станции соединен со входом передатчика подсвета целей и ракеты, выход передатчика подсвета целей и ракеты соединен с первым входом фазированной антенной решетки. Недостатками известных устройств является существенное ухудшение тактико-технических характеристик зенитного ракетного комплекса в сложной помеховой обстановке.
Наиболее близкой по технической сущности к предлагаемой полезной модели является «Самоходная огневая установка (СОУ) обнаружения, сопровождения и подсвета целей, наведения и пуска ракет зенитного ракетного комплекса средней дальности» (RU 2333450 C1, опубл. 10.09.2008 г. МПК F41H 11/02). Она содержит первую антенную систему, выход которой соединен с первым входом радиолокационной станции, первый выход которой подключен к первому входу цифровой вычислительной системы, первый выход которой подключен к поворотной пусковой установке с ракетами, на которой установлена гироскопическая система измерения углов курса, крена и тангажа, вход которой подключен к выходу системы навигации, топопривязки и ориентирования, размещенной на самоходном шасси. Выход гироскопической системы измерения углов курса, крена и тангажа соединен со вторым входом цифровой вычислительной системы, второй выход цифровой вычислительной системы подключен ко второму входу радиолокационной станции, второй выход которой соединен с входом первой антенной системы. Кроме того, она снабжена второй антенной системой, приемным устройством и интеллектуальной системой для распознавания класса помехи и принятия решения об оптимальном по критерию максимального отношения сигнал\помеха методе компенсации воздействия помехи данного класса. Выход второй антенной системы соединен с входом приемного устройства, выход приемного устройства подключен к первому входу интеллектуальной системы, выход интеллектуальной системы соединен с третьим входом цифровой вычислительной системы, третий выход которой подключен ко второму входу интеллектуальной системы.
Недостатком этого технического решения является ухудшение тактико-технических характеристик СОУ в условиях применения противником интенсивных активных помех различного вида (модулированные и смодулированные) (Палий А.И. Радиоэлектронная борьба. - М.: Воениздат, 1989 г.).
Техническим результатом предлагаемого изобретения является достижение возможности эффективной боевой работы в условиях активных помех различного вида. Сущность предлагаемой самоходной огневой установки обнаружения, сопровождения и подсвета целей, наведения и пуска ракет зенитного ракетного комплекса средней дальности состоит в том, что она содержит первую антенную систему, радиолокационную станцию, цифровую вычислительную систему, поворотную пусковую установку с ракетами, систему навигации, топопривязки и ориентирования, гироскопическую систему, вторую антенную систему, приемное устройство, интеллектуальную систему. Выход первой антенной системы соединен с первым входом радиолокационной станции. Первый выход радиолокационной станции подключен к первому входу цифровой вычислительной системы, первый выход которой подключен к поворотной пусковой установке с ракетами, на которой установлена гироскопическая система измерения углов курса, крена и тангажа, вход которой подключен к выходу системы навигации, топопривязки и ориентирования, размещенной на самоходном шасси. Выход гироскопической системы измерения углов курса, крена и тангажа соединен со вторым входом цифровой вычислительной системы, второй выход цифровой вычислительной системы подключен ко второму входу радиолокационной станции, второй выход которой соединен с входом первой антенной системы. Выход второй антенной системы соединен с входом приемного устройства, выход приемного устройства подключен к первому входу интеллектуальной системы, первый выход интеллектуальной системы соединен с третьим входом цифровой вычислительной системы, третий выход которой подключен ко второму входу интеллектуальной системы.
Новым в предлагаемом изобретении является введение в состав самоходной огневой установки обнаружения, сопровождения и подсвета целей, наведения и пуска ракет зенитного ракетного комплекса средней дальности мортир, датчика определения направления и силы ветра и устройства сопряжения. Второй выход интеллектуальной системы соединен с входом мортир, выход датчика определения направления и силы ветра соединен с устройством сопряжения, выход которого подключен в третьему входу интеллектуальной системы.
На фиг.1 изображена структурная схема самоходной огневой установки обнаружения, сопровождения и подсвета целей, наведения и пуска ракет зенитного ракетного комплекса средней дальности.
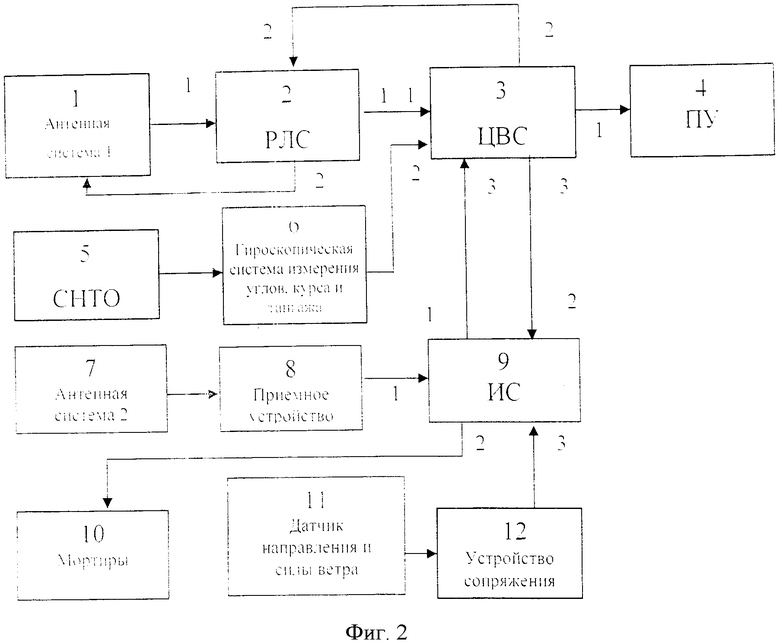
На фиг.2 изображена функциональная схема самоходной огневой установки обнаружения, сопровождения и подсвета целей, наведения и пуска ракет зенитного ракетного комплекса средней дальности.
Самоходная огневая установка обнаружения, сопровождения и подсвета целей, наведения и пуска ракет зенитного ракетного комплекса средней дальности содержит первую антенную систему 1, радиолокационную станцию (РЛС) 2, цифровую вычислительную систему (ЦВС) 3, поворотную пусковую установку с ракетами (ПУ) 4, систему навигации, топопривязки и ориентирования (СНТО) 5, гироскопическую систему измерения углов курса, крена и тангажа 6, вторую антенную систему 7, приемное устройство 8, интеллектуальную систему (ИС) 9, мортиры 10, датчик определения направления и силы ветра 11 и устройство сопряжения 12. Выход первой антенной системы 1 соединен с первым входом радиолокационной станции 2. Первый выход радиолокационной станции 2 подключен к первому входу цифровой вычислительной системы 3, первый выход которой подключен к поворотной пусковой установке с ракетами 4, на которой установлена гироскопическая система измерения углов курса, крена и тангажа 6. Вход гироскопической системы измерения углов курса, крена и тангажа 6 подключен к выходу системы навигации, топопривязки и ориентирования 5, размещенной на самоходном шасси. Выход гироскопической системы измерения углов курса, крена и тангажа 6 соединен со вторым входом цифровой вычислительной системы 3, второй выход цифровой вычислительной системы 3 подключен ко второму входу радиолокационной станции 2, второй выход которой соединен с входом первой антенной системы 1. Выход второй антенной системы 7 соединен с входом приемного устройства 8, выход приемного устройства 8 подключен к первому входу интеллектуальной системы 9, первый выход интеллектуальной системы 9 соединен с третьим входом цифровой вычислительной системы 3, третий выход которой подключен ко второму входу интеллектуальной системы 9. Второй выход интеллектуальной системы 9 соединен с входом мортир 10, выход датчика определения направления и силы ветра 11 соединен с устройством сопряжения 12, выход которого подключен в третьему входу интеллектуальной системы 9.
Самоходная огневая установка обнаружения, сопровождения и подсвета целей, наведения и пуска ракет зенитного ракетного комплекса средней дальности работает следующим образом:
После развертывания зенитного ракетного комплекса на местности, после марша и установки СОУ на боевую позицию из системы навигации, топопривязки и ориентирования 5 и гироскопическую систему измерения углов курса, крена и тангажа 6, ЦВС 3 вводится значение курсового угла СОУ (угол между продольной осью СОУ и направлением на север). Курсовой угол СОУ используется в гироскопической системе измерения углов курса, крена и тангажа 6 в качестве начальных условий, и в процессе дальнейшей работы гироскопическая система измерения углов курса, крена и тангажа 6 выдает значение курса с учетом этого угла. В ЦВС курсовой угол СОУ используется в сеансах коррекции для расчета угла ψрасч, где ψрасч - рассчитанный курсовой угол.
В процессе боевой работы ЗРК РЛС СОУ осуществляет поиск воздушных целей в заданном секторе ответственности. Сигналы с выхода первой антенной системы 1 выдаются на вход РЛС 2, которая осуществляет обнаружение, захват, сопровождение и подсвет целей. После усиления и преобразования сигналы целей поступают с первого выхода РЛС 2 на первый вход ЦВС 3, в которой производится формирование сигналов управления ПУ 4 для выработки углов упреждения и формирование сигнала (полетного задания) для наведения ракеты. Сформированные сигналы выдаются с первого выхода ЦВС 3 на вход ПУ 4, со второго выхода ЦВС 3 на второй вход РЛС 2 и с третьего выхода ЦВС 3 на второй вход РЛС 2. На ПУ 4 установлена гироскопическая система измерения углов курса, крена и тангажа 6, необходимая для стабилизации луча первой антенной системы 1 в пространстве при поворотах ПУ 4 в горизонтальной плоскости и при наличии кренов. Измеренные значения углов курса с выхода гироскопической системы измерения углов курса, крена и тангажа угловых координат 6 ψизм подаются на второй вход ЦВС 3, где ψизм - измеренный в горизонтальной плоскости курсовой угол СОУ. После усреднения вычисляется разность
Δ=ψрасч-ψизм, которая используется в ЦВС для стабилизации луча первой антенной системы 1.
Когда уровень помехи достигает критического значения для устойчивого обнаружения и сопровождения воздушной цели (анализ уровня помехи осуществляется с использованием интеллектуальной системы), интеллектуальная система 9 формирует команду на включение режима подавления активной помехи с использованием датчика определения направления и силы ветра 11 и мортир 12. Сигнал активной помехи принимается второй антенной системой 7, усиливается приемным устройством 8 и поступает на интеллектуальную систему 9. В интеллектуальной системе 9 осуществляется анализ помехи, ее идентификация, определяется пеленг на помехопостановщик и выбор оптимальных методов защиты от активных помех данного вида. С выхода датчика определения направления и силы ветра 11 (см , ) через устройство сопряжения 12 на интеллектуальную систему 9 поступает информация о параметрах ветра и с их учетом формируется команда «пуск» на мортиры 10 (cm.www , www.) в направлении помехопостановщика. Гранаты мортир содержат дипольные радиоотражатели (ДРО), длина и толщина которых выбирается таким образом, чтобы обеспечить наиболее активное рассеяние радиоволн активных помех при меньших размерах (выбор типа гранаты с необходимыми размерами ДРО формирует ИС 9 по результатам анализа параметров активной помехи). Максимальное значение ЭПР (эффективной поверхности рассеяния) имеют ДРО с длиной, близкой к половине длины волны подавляемой помехи, при которой наблюдается резонансное рассеяние. Дипольное облако, которое образуется при разрыве пущенной из мортиры гранаты в направлении помехопостановщика (на дальность30-50 м от СОУ), имеет ЭПР, равное произведению ЭПР отдельных ДРО на количество ДРО, и обеспечивает надежное экранирование (затухание порядка 20-40 дб), что приводит к снижению уровня активной помехи, принимаемой первой антенной 1 и снижению уровня сигнала РЛС СОУ принимаемого и анализируемого помехопостановщиком для формирования (одного из видов, например, ретранслированной) активной помехи. Отраженный сигнал от облака ДРО является для РЛС СОУ пассивной помехой, способы защиты от которой хорошо известны (например, использование систем селекции движущейся цели, квазинепрерывные сигналы и др.) (см.Палий А.И. Радиоэлектронная борьба. - М.: Воениздат, 1989 г.).
Обучение ИС 9 осуществляется с использованием известных способов противодействия помехам в радиолокации (см. Юдин Л.М., Фомичев К.И. Системы радиоэлектронного противодействия. Запоминание высокочастотных сигналов. - Электроника, НТБ,1999, Вакин С.А., Шустов Л.Н. Основы радиоэлектронной борьбы. ВВИА им.проф. Н.Е.Жуковского, 1998, Палий А.И. Радиоэлектронная борьба: - Воениздат, 1989, Вакин С.А., Шустов Л.Н. Основы радиопротиводействия и радиотехнической разведки. - М,: Сов. радио, 1968., Тузов Г.И. Помехозащищенность радиосистем со сложными сигналами. - М.: Радио и связь, 1985, Защита от радиопомех. Под ред. М.В.Максимова, М: Советское радио, 1976 г., Гудкин Л.С. Теория оптимальных методов радиоприема при флуктуационных помехах. М.: Сов. радио, 1972 и др.), алгоритмы различных методов и способов защиты от различных видов активных помех хранятся в ЦВС 3 и реализуются по команде от ИС 9.
Таким образом, предлагаемая самоходная огневая установка обнаружения, сопровождения и подсвета целей, наведения и пуска ракет зенитного ракетного комплекса средней дальности может обеспечить эффективную боевую работу в условиях активных помех различного вида без снижения основных тактико-технических характеристик СОУ.
| название | год | авторы | номер документа |
|---|---|---|---|
| САМОХОДНАЯ ОГНЕВАЯ УСТАНОВКА ОБНАРУЖЕНИЯ, СОПРОВОЖДЕНИЯ И ПОДСВЕТА ЦЕЛЕЙ, НАВЕДЕНИЯ И ПУСКА РАКЕТ ЗЕНИТНОГО РАКЕТНОГО КОМПЛЕКСА СРЕДНЕЙ ДАЛЬНОСТИ | 2012 |
|
RU2518389C1 |
| САМОХОДНАЯ ОГНЕВАЯ УСТАНОВКА ОБНАРУЖЕНИЯ, СОПРОВОЖДЕНИЯ И ПОДСВЕТА ЦЕЛЕЙ, НАВЕДЕНИЯ И ПУСКА РАКЕТ ЗЕНИТНОГО РАКЕТНОГО КОМПЛЕКСА СРЕДНЕЙ ДАЛЬНОСТИ | 2007 |
|
RU2333450C1 |
| САМОХОДНАЯ ОГНЕВАЯ УСТАНОВКА ОБНАРУЖЕНИЯ, СОПРОВОЖДЕНИЯ И ПОДСВЕТА ЦЕЛЕЙ, НАВЕДЕНИЯ И ПУСКА РАКЕТ ЗЕНИТНОГО РАКЕТНОГО КОМПЛЕКСА СРЕДНЕЙ ДАЛЬНОСТИ | 2002 |
|
RU2208213C1 |
| САМОХОДНАЯ ОГНЕВАЯ УСТАНОВКА ОБНАРУЖЕНИЯ, СОПРОВОЖДЕНИЯ И ПОДСВЕТА ЦЕЛЕЙ, НАВЕДЕНИЯ И ПУСКА РАКЕТ С ПОЛУАКТИВНЫМИ РАДИОЧАСТОТНЫМИ ГОЛОВКАМИ САМОНАВЕДЕНИЯ ЗЕНИТНОГО РАКЕТНОГО КОМПЛЕКСА СРЕДНЕЙ ДАЛЬНОСТИ | 2008 |
|
RU2363911C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ОБНАРУЖЕНИЯ ЦЕЛЕЙ, ПОДСВЕТА СОПРОВОЖДАЕМЫХ ЦЕЛЕЙ И НАВЕДЕНИЯ РАКЕТ ЗЕНИТНО-РАКЕТНОГО КОМПЛЕКСА СРЕДНЕЙ ДАЛЬНОСТИ ДЕЙСТВИЯ | 2007 |
|
RU2343394C1 |
| МОБИЛЬНЫЙ ЗЕНИТНЫЙ РАКЕТНЫЙ КОМПЛЕКС | 2003 |
|
RU2253820C2 |
| САМОХОДНАЯ ОГНЕВАЯ УСТАНОВКА ОБНАРУЖЕНИЯ, СОПРОВОЖДЕНИЯ И ПОДСВЕТА ЦЕЛЕЙ, НАВЕДЕНИЯ И ПУСКА РАКЕТ ЗЕНИТНОГО РАКЕТНОГО КОМПЛЕКСА СРЕДНЕЙ ДАЛЬНОСТИ | 2002 |
|
RU2223459C1 |
| МОБИЛЬНАЯ РАДИОЛОКАЦИОННАЯ УСТАНОВКА ПОДСВЕТА И НАВЕДЕНИЯ ЗЕНИТНО-РАКЕТНОГО КОМПЛЕКСА СРЕДНЕЙ ДАЛЬНОСТИ | 2007 |
|
RU2330307C1 |
| МОБИЛЬНАЯ РАДИОЛОКАЦИОННАЯ УСТАНОВКА ПОДСВЕТА И НАВЕДЕНИЯ ЗЕНИТНО-РАКЕТНОГО КОМПЛЕКСА СРЕДНЕЙ ДАЛЬНОСТИ ДЕЙСТВИЯ | 2000 |
|
RU2169333C1 |
| ОГНЕВАЯ СЕКЦИЯ | 2003 |
|
RU2229668C1 |
Изобретение относится к военной технике, а именно к зенитным ракетным комплексам (ЗРК). Самоходная огневая установка обнаружения, сопровождения и подсвета целей, наведения и пуска ракет зенитного ракетного комплекса средней дальности содержит первую антенную систему, радиолокационную станцию, цифровую вычислительную систему, поворотную пусковую установку с ракетами, на которой установлена гироскопическая система измерения углов курса, крена и тангажа, систему навигации, топопривязки и ориентирования, размещенную на самоходном шасси, интеллектуальную систему (ИС), мортиры, датчик определения направления и силы ветра, соединённый через устройство сопряжения с ИС. Изобретение позволяет повысить боевую эффективность ЗРК в условиях активных помех различного вида. 2 ил.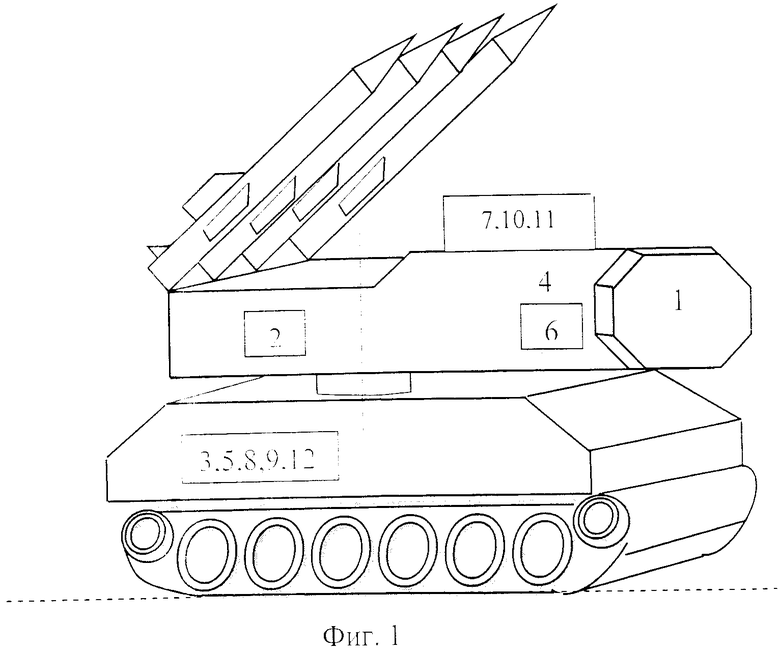
Самоходная огневая установка обнаружения, сопровождения и подсвета целей, наведения и пуска ракет зенитного ракетного комплекса средней дальности, содержащая первую антенную систему, радиолокационную станцию, цифровую вычислительную систему, поворотную пусковую установку с ракетами, систему навигации, топопривязки и ориентирования, гироскопическую систему, вторую антенную систему, приемное устройство, интеллектуальную систему, выход первой антенной системы соединен с первым входом радиолокационной станции, первый выход радиолокационной станции подключен к первому входу цифровой вычислительной системы, первый выход которой подключен к поворотной пусковой установке с ракетами, на которой установлена гироскопическая система измерения углов курса, крена и тангажа, вход которой подключен к выходу системы навигации, топопривязки и ориентирования, размещенной на самоходном шасси, выход гироскопической системы измерения углов курса, крена и тангажа соединен со вторым входом цифровой вычислительной системы, второй выход цифровой вычислительной системы подключен ко второму входу радиолокационной станции, второй выход которой соединен с входом первой антенной системы, выход второй антенной системы соединен с входом приемного устройства, выход приемного устройства подключен к первому входу интеллектуальной системы, первый выход интеллектуальной системы соединен с третьим входом цифровой вычислительной системы, третий выход которой подключен ко второму входу интеллектуальной системы, отличающаяся тем, что в нее введены мортиры, датчик определения направления и силы ветра и устройство сопряжения, второй выход интеллектуальной системы соединен с входом мортир, выход датчика определения направления и силы ветра соединен с устройством сопряжения, выход которого подключен в третьему входу интеллектуальной системы.
| САМОХОДНАЯ ОГНЕВАЯ УСТАНОВКА ОБНАРУЖЕНИЯ, СОПРОВОЖДЕНИЯ И ПОДСВЕТА ЦЕЛЕЙ, НАВЕДЕНИЯ И ПУСКА РАКЕТ ЗЕНИТНОГО РАКЕТНОГО КОМПЛЕКСА СРЕДНЕЙ ДАЛЬНОСТИ | 2007 |
|
RU2333450C1 |
| Судно | 1946 |
|
SU70514A1 |
| US 6343534 B1, 05.02.2002 | |||
| СТЕКЛО ДЛЯ ВЫРАБОТКИ ВОЛОКНА | 2002 |
|
RU2225851C1 |

