Предлагаемое техническое решение относится к области оборонной техники, в частности к мобильным зенитным ракетным комплексам (ЗРК), и может быть использовано для организации противовоздушной обороны войск и военных объектов от поражения средствами воздушного нападения противника.
В структуре современной противовоздушной обороны ЗРК являются основными средствами для организации наведения и пуска зенитных управляемых ракет (ЗУР) на средства воздушного нападения (СВН) противника.
Известны ЗРК, например, американские “Хок”, “Пэтриот”, “Усовершенствованный Хок” [см. Ф.К.Неупокоев. “Стрельба зенитными ракетами”. Военное изд. М.О. СССР, М., 1980 г., стр. 52; Н.А.Василин, А.А.Гуринович “Зенитные ракетные комплексы”, Мн., ООО “Попури”; А.С.Мальгин “Управление огнем зенитных ракетных комплексов”. Военное изд. М.О., М., 1987 г., с.21], отечественные ЗРК “Куб”, “Квадрат”, “Бук”, [см. “Оружие России 2000”, М., Издат. Дом “Военный парад”, 2000, стр.589, 593], содержащие радиолокационную станцию обнаружения целей (СОЦ), пункт боевого управления (ПБУ) или командный пункт (КП), огневые секции, состоящие из установки с радиолокатором подсвета и наведения (УРПН) и пусковой установки (ПУ). При этом количество огневых секций в составе ЗРК может быть различным.
Приведенные аналоги обладают недостатком, заключающимся в том, что дальность обнаружения низколетящих целей (НЛЦ) ограничивается фактическим значением радиогоризонта, который, в свою очередь, функционально зависит от абсолютных текущих значений высоты обнаруживаемой цели и высоты приемо-передающей антенны РЛС [см. М.И.Финкельштейн. Основы радиолокации. М., “Сов. радио”, 1973 г., стр.286].
Наиболее близким по технической сущности и достигаемому результату является ЗРК “БУК-М1-2” [см. “Зенитные ракетные комплексы ПВО сухопутных войск”. Техника и вооружение вчера, сегодня, завтра. №5-6, 1999 г., стр.41].
Зенитный ракетный комплекс содержит радиолокационную станцию обнаружения целей, командный пункт, самоходную огневую установку с радиолокатором подсвета и наведения и пусковую установку с комплектом зенитных управляемых ракет, при этом количество самоходных установок определяется дополнительными требованиями к составу комплекса.
Известно, что дальняя граница зоны обнаружения низколетящих целей радиолокационной станцией указанного комплекса будет ограничиваться дальностью прямой видимости, которая равна:

где Rз - 6370 км - радиус Земли;
Нц - высота цели над земной поверхностью в км;
НА - высота приемо-передающей антенны РЛС в км.
Так при НA≈3 м и Нц≈30 м для Dоб - получаем величину порядка 25-26 км.
Указанное значение дальней границы обнаружения целей для целого ряда случаев успешного отражения налета СВН оказывается недостаточным и определяется в основном потенциальными характеристиками приемо-передающего устройства радиолокационной системы.
Техническим результатом предлагаемого решения является создание мобильного зенитного ракетного комплекса, в котором дальняя граница обнаружения низколетящих целей превышает дальность прямой видимости в 3-4 раза.
Технический результат достигается тем, что в мобильный зенитный ракетный комплекс для обнаружения и поражения аэродинамических, баллистических целей и крылатых ракет в составе последовательно соединенных радиолокационной станции обнаружения и целеуказания, пункта боевого управления, содержащего аппаратуру приемо-передачи данных, второй выход которой соединен с цифровой вычислительной системой пункта боевого управления, установки с радиолокатором подсвета и наведения, пусковой установки, содержащей последовательно соединенные аппаратуру приемо-передачи данных, цифровую вычислительную систему пусковой установки, поворотную пусковую установку, К зенитных управляемых ракет с полуактивным или активным методами наведения, при этом третий вход цифровой вычислительной системы пусковой установки соединен с выходом системы навигации, топопривязки и ориентирования, а также воздушный носитель (например, вертолет, летающая платформа и пр.) с радиолокатором подсвета и наведения, содержащий последовательно соединенные многофункциональную радиолокационную станцию, цифровую вычислительную систему и аппаратуру приемо-передачи данных воздушного носителя, при этом выход аппаратуры приемо-передачи данных воздушного носителя соединен со входом аппаратуры приемо-передачи данных пункта боевого управления, а второй вход цифровой вычислительной системы воздушного носителя соединен с выходом навигационного процессора, первый вход которого соединен с выходом приемного устройства обработки радионавигационных сигналов, а второй вход соединен с выходом инерциальной системы, и в состав пункта боевого управления введены последовательно соединенные приемное устройство обработки радионавигационных сигналов и навигационный процессор пункта боевого управления, выход которого соединен со вторым входом цифровой вычислительной системы пункта боевого управления.
Сущность предлагаемого технического решения будет понятна из следующего описания и приложенного к нему графического материала.
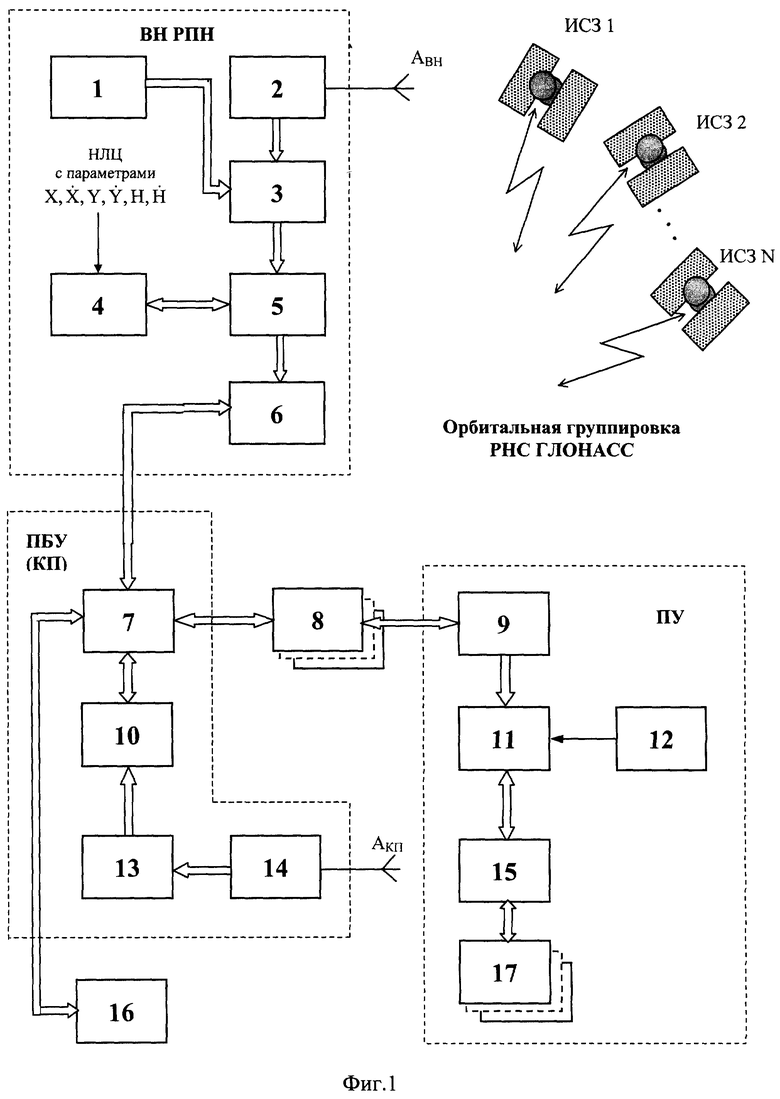
На фиг.1 изображена блок-схема мобильного зенитного ракетного комплекса, на которой цифрами обозначены следующие устройства и системы:
1 - инерциальная система на воздушном носителе (ИС ВН);
2 - приемное устройство обработки радионавигационных сигналов на воздушном носителе (ПУОРС ВН);
3 - навигационный процессор на воздушном носителе (НП ВН);
4 - многофункциональная радиолокационная станция (МФРЛС ВН);
5 - цифровая вычислительная система воздушного носителя (ЦВС ВН);
6 - аппаратура приемо-передачи данных воздушного носителя (АПД ВН);
7 - аппаратура приемо-передачи данных пункта боевого управления (АПД ПБУ);
8 - установка с радиолокатором подсвета и наведения (УРПН);
9 - аппаратура приемо-передачи данных пусковой установки (АПД ПУ);
10 - цифровая вычислительная система пункта боевого управления (ЦВС ПБУ);
11 - цифровая вычислительная система пусковой установки (ЦВС ПУ);
12 - система навигации, топопривязки и ориентирования пусковой установки (СНТО ПУ);
13 - навигационный процессор пункта боевого управления (НП ПБУ);
14 - приемное устройство обработки радионавигационных сигналов пункта боевого управления (ПУОРС ПБУ);
15 - поворотная пусковая установка (ППУ);
16 - радиолокационная станция обнаружения и целеуказания (СОЦ);
17 - зенитная управляемая ракета (ЗУР).
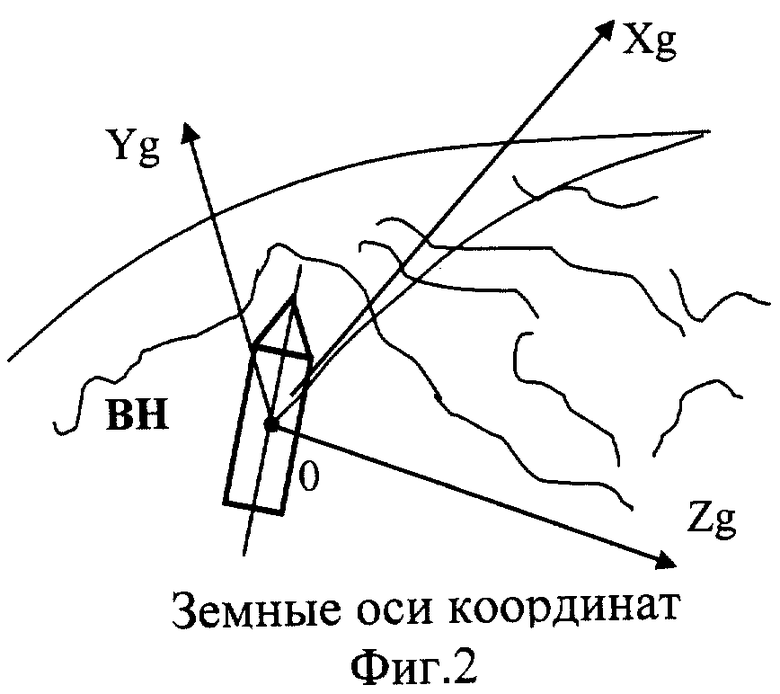
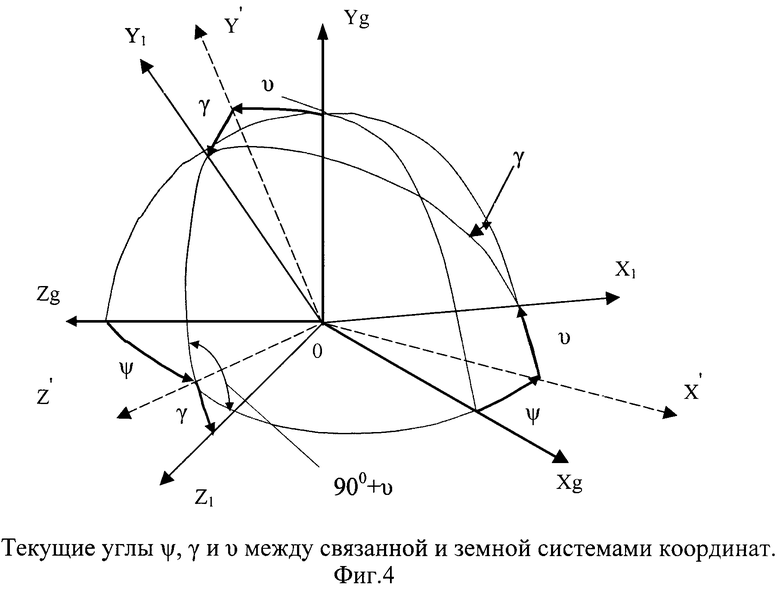
На фиг.2, 3 и 4 приведены соответственно земные оси координат Xg Yg Zg воздушного носителя, связанные оси координат X1 Y1 Z1 воздушного носителя и текущие углы ψ (угол рыскания), γ (угол крена) и υ (угол тангажа) между связанной X1 Y1 Z1 и земной Xg Yg Zg системами координат (СК).
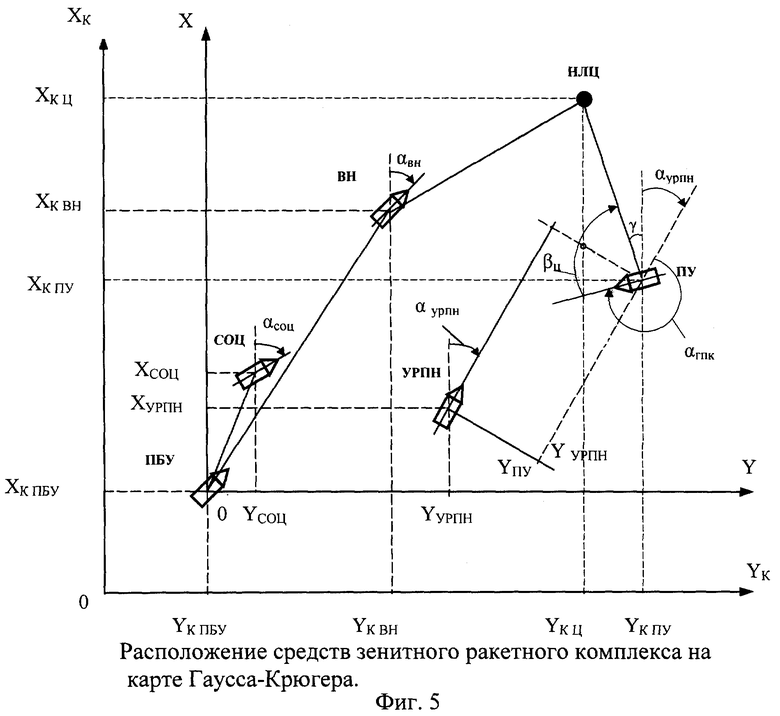
На фиг.5 показано расположение средств зенитного ракетного комплекса на карте Гаусса-Крюгера в прямоугольной системе координат, при этом земные оси координат Xg Yg Zg 3PK параллельны одноименным осям системы координат карты, т.е. Хк Yк Zk.
На фиг.6 показано положение цели в связанной СК ВН.
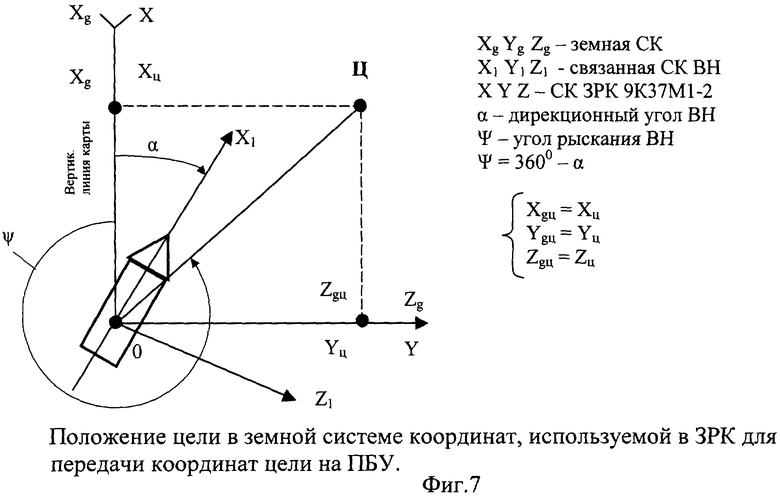
На фиг.7 показано положение цели в земной системе координат, используемой в 3PK для передачи координат цели на ПБУ.
Мобильный зенитный ракетный комплекс содержит инерциальную систему 1, приемное устройство обработки радионавигационных сигналов 2, навигационный процессор 3, многофункциональную радиолокационную станцию 4, цифровую вычислительную систему 5, аппаратуру приемо-передачи данных 6 (устройства 1-6 входят в состав аппаратуры воздушного носителя); аппаратуру приемо-передачи данных 7, цифровую вычислительную систему 10, навигационный процессор 13, приемное устройство обработки радионавигационных сигналов 14 (устройства 7, 10, 13 и 14 входят в состав аппаратуры пункта боевого управления), аппаратуру приемо-передачи данных 9, цифровую вычислительную систему 11, поворотную пусковую установку 15, систему навигации, топопривязки и ориентирования 12, зенитные управляемые ракеты 17 (устройства 9, 11, 12, 15 и 17) входят в состав аппаратуры пусковой установки); установку с радиолокатором подсвета и наведения 8, радиолокационную станцию обнаружения и целеуказания 16, при этом установка с радиолокатором подсвета и наведения 8 и пусковая установка (устройства 9, 11, 12, 15 и 17) образуют огневую секцию, в которой задачи организации обстрела цели по целеуказанию с пункта боевого управления (устройства 7, 10, 13 и 14) решаются автономно с использованием известных алгоритмов.
Мобильный зенитный ракетный комплекс работает следующим образом.
После установки наземных боевых средств мобильного зенитного ракетного комплекса на заданной позиции и выхода воздушного носителя на заданный курс полета осуществляется взаимная координатная привязка всех средств комплекса относительно координат пункта боевого управления или КП, после чего радиолокационная станция обнаружения целей 16, входящая в состав наземных средств комплекса, начинает процесс обнаружения целей во всем диапазоне заданных высот, а радиолокатор подсвета и наведения, расположенный на воздушном носителе, осуществляет поиск и обнаружение преимущественно низколетящих целей.
Известно, что обмен информацией между средствами ЗРК о текущем положении обнаруженных целей требует наличия общей системы координат. По этой причине координаты низколетящей цели, измеренные на воздушном носителе, т.е. ε , β , D,  в лучевой системе координат радиолокатора, пересчитываются в абсолютные координаты с учетом постоянного изменения местоположения, а также углов рыскания, крена и тангажа воздушного носителя. Пересчитанные координаты НЛЦ с помощью аппаратуры приемо-передачи данных 6 и 7 передаются на пункт боевого управления, который в штатном режиме работы через выбранную конкретную установку с радиолокатором подсвета и наведения 8 передает эти координаты на пусковую установку.
в лучевой системе координат радиолокатора, пересчитываются в абсолютные координаты с учетом постоянного изменения местоположения, а также углов рыскания, крена и тангажа воздушного носителя. Пересчитанные координаты НЛЦ с помощью аппаратуры приемо-передачи данных 6 и 7 передаются на пункт боевого управления, который в штатном режиме работы через выбранную конкретную установку с радиолокатором подсвета и наведения 8 передает эти координаты на пусковую установку.
Помимо общей координатной привязки, которая осуществляется с помощью штатных средств комплекса, с помощью инерциальной системы 1, приемного устройства обработки радионавигационных сигналов 2 и навигационного процессора 3 осуществляется непрерывное измерение текущих абсолютных координат воздушного носителя по сигналам от радионавигационных искусственных спутников земли ИCЗ1...ИСЗN.
При этом воздушный носитель, как жесткое тело, имеет шесть степеней свободы и соответственно в общем случае положение его относительно земной системы координат (или осей) будет определяться шестью координатами, т.е. тремя координатами ХBH YBH ZBH с началом в нулевой точке связанной системы координат и измеряемых с помощью ИСЗ, и тремя углами между связанной и земной системами координат, измеряемых с помощью ИС 1 [см. А.А.Лебедев, Л.С.Чернобровкин. Динамика полета беспилотных летательных аппаратов. М., Оборонгиз, 1962, стр.43].
Пространственное положение воздушного носителя определяется в два этапа:
- сначала определяются текущие координаты спутников и первичные навигационные параметры (дальность, ее производные) относительно соответствующих навигационных спутников;
- затем рассчитываются вторичные параметры, т.е. географическая широта, долгота, высота воздушного носителя [см. Глобальная спутниковая радионавигационная система. Под ред. В.Н.Харисова, А.И.Перова и др. М., ИПРЖР, 1999, стр.30].
Одновременно аналогичная задача решается и на пункте боевого управления с использованием приемного устройства обработки радионавигационных сигналов 14 и навигационного процессора 13, но в отличие от воздушного носителя, на котором абсолютные координаты измеряются (или вычисляются) из-за движения последнего непрерывно, на пункте боевого управления указанный процесс является разовым для каждой конкретной точки стояния.
Как отмечалось выше, для ориентирования в пространстве осей МФРЛС ВН 4 используются две системы координат: земная система координат Xg Yg Zg и система координат X1 Y1 Z1, связанная с осями ВН.
Система земных осей Xg Yg Zg жестко связана с землей.
Ось Yg направлена вертикально вверх, а оси Xg и Zg расположены в горизонтальной плоскости.
Ось Xg направлена на север, образуя с осями Yg, Zg правую систему координат. Правая система координат определяет положительное направление углов поворота осей: например, от оси Xg к оси Yg - против часовой стрелки, если смотреть с конца оси Zg и так далее по всем осям системы (от Yg к Zg с конца оси Xg и от Zg к Xg с конца оси Yg).
Ось Zg направлена перпендикулярно двум остальным (Xg, Yg), замыкая правую систему координат.
Система связанных осей координат жестко связана с корпусом ВН. Начало системы координат X1 Y1 Z1 располагается в центре тяжести ВН.
Ось X1 (продольная ось) лежит в плоскости симметрии ВН, направлена от кормы к носу и параллельна продольной оси ВН.
Ось Y1 (нормальная ось) лежит в плоскости симметрии ВН и повернута против часовой стрелки на угол 90° относительно оси X1.
Ось Z1 (поперечная ось) перпендикулярна плоскости X1 0 Y1 и направлена вправо (если смотреть по ходу ВН).
Система связанных осей, как и земная - правая.
Переход от связанной X1 Y1 Z1 к земной Xg Yg Zg системе координат осуществляется тремя поворотами:
- поворот Xg Yg Zg в плоскости горизонта Xg Zg относительно Yg на угол ψ , при этом Zg занимает положение Z’, Xg→Х’;
- поворот Х’ Yg Z’ относительно Z’ на угол υ , тогда X’ занимает положение X1, Yg→Y’;
- поворот X1 Y’ Z’ относительно X1 на угол γ , тогда ‘Y занимает положение Y1, Z’→ Z1.
Угол υ , образуемый осью X1 с горизонтальной плоскостью Xg 0 Zg, называется углом тангажа.
Угол ψ , образуемый проекцией оси X1 на горизонтальную плоскость Xg 0 Zg, с осью Xg, называется углом рыскания (углом пути).
Угол γ , образуемый осью Z1 и горизонтальной плоскостью Xg 0 Zg, называется углом крена.
В таблице 1 приведены направляющие косинусы для перехода от одной системы координат к другой [см. Г.С.Бюшгенс, Р.В.Студнев. Динамика полета. Пространственное движение. М., Машиностроение, 1983, с.16].
Информация по углам тангажа υ и крена γ поступает в ЦВС ВН 5 от датчика кренов, расположенных в инерциальной системе ВН 1.
Угол рыскания ψ рассчитывается по формуле:
ψ =360° - α вн
где α BH - дирекционный угол ВН.
Работа МФРЛС ВН 4 происходит следующим образом:
- МФРЛС ВН 4 обнаруживает цель и определяет ее координаты X1Ц Y1Ц Z1Ц (либо ε ц, β ц, Дц) в связанной системе координат;
- ЦВС ВН 5 пересчитывает полученные координаты X1Ц Y1Ц Z1Ц в земные XgЦ YgЦ ZgЦ (см. табл. 1);
- ЦВС ВН 5 приводит полученные земные координаты в систему координат XYZ, принятую для топопривязки и передачи ЦУ на средства ЗРК:
XЦ=YgЦ, YЦ=ZgЦ, ZЦ=YgЦ.
Это преобразование связано с тем, что системы координат (связанная X1 Y1 Z1 и земная Xg Yg Zg), принятые для МФРЛС ВН 4 - правые, а система координат XYZ, принятая для топопривязки и передачи ЦУ в ЗРК - левая. При этом положительное направление углов (ψ ,υ ,γ ) в правых СК направлено против часовой стрелки, а в левых СК (угол α ) - направлено по часовой стрелке.
После указанного преобразования ВН может передать целеуказание через ПБУ относительно точки стояния ПБУ на УРПН 8, затем от УРПН 8 на ПУ.
При этом привязка ПУ производится в системе координат УРПН 8, т.е. Хурпн, Yурпн, Zурпн, в которой ось Хурпн совпадает с продольной осью УРПН 8. Координаты точки стояния ПУ отсчитываются от точки стояния УРПН 8, а курсовой угол пусковой установки α ГПК - от положительного направления УРПН 8 до направления продольной оси ПУ по часовой стрелке. С учетом изложенного на ПУ осуществляется пересчет данных целеуказания от УРПН 8 в угол места цели ε ц, азимут цели β ц и наклонную дальность до цели DЦ относительно своей точки стояния.
С целью упрощения аппаратурного построения с одновременным удешевлением приемных устройств обработки радионавигационных сигналов 2 и 14 и навигационных процессоров 3 и 13 выполняют измерения собственных координат как на воздушном носителе, так и на пункте боевого управления не трех координат, а лишь двух, поскольку текущая высота воздушного носителя достаточно точно определяется с помощью бортовых радиовысотомеров, а высоту пункта боевого управления при обстреле “невидимой” (загоризонтной) цели можно считать нулевой.
Если низколетящая цель, сопровождаемая радиолокатором на воздушном носителе, начинает совершать маневр после пуска ЗУР 17, данные полетного задания (или целеуказания), отработанные радиолокационной головкой самонаведения до схода ЗУР 17 с пусковой установки могут “устареть” и угловые ошибки целеуказания (или визирования цели) к моменту захвата сигнала цели станут больше допустимых.
Для обеспечения захвата сигнала цели радиолокационной головкой самонаведения в такой ситуации предусматривается передача на борт ЗУР 17 сигналов радиокоррекции, например на частоте канала подсвета цели, формируемых ЦВС ВН 5 по информации от МФРЛС ВН 4.
Таким образом, введение в прототип зенитного ракетного комплекса воздушного носителя с радиолокатором подсвета и наведения и с реализацией измерения (или определения) собственных текущих координат по сигналам орбитальной группировки радионавигационной системы (РНС), а также введение в состав пункта боевого управления приемного устройства обработки радионавигационных сигналов и навигационного процессора позволило увеличить дальнюю границу обнаружения и зоны поражения низколетящих целей в 3-4 раза, что особенно важно при борьбе с перспективными высокоскоростными самолетами, использующими для преодоления опасной зоны полет на высотах менее 40-50 м, а также использующими при этом естественные природные укрытия, невысокие горы и пр. Одновременно эти введения приводят к увеличению количества стрельбовых каналов комплекса, использующего ЗУР как с полуактивными, так и с активными радиолокационными головками самонаведения.
К дополнительным преимуществам относятся следующие параметры:
- точность выдаваемых данных в режиме “радионавигация” не зависит от длительности марша;
- абсолютная предельная погрешность удержания (или измерения) дирекционного угла в движении не более 0,6 град/час;
- среднеквадратическая погрешность выработки прямоугольных координат и высоты не более 10 м на стоянке и не более 30 м в движении.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОГНЕВАЯ СЕКЦИЯ | 2003 |
|
RU2229668C1 |
| ОГНЕВАЯ СЕКЦИЯ | 2003 |
|
RU2229085C1 |
| ОГНЕВАЯ СЕКЦИЯ | 2003 |
|
RU2253821C1 |
| СПОСОБ ПОСТРОЕНИЯ ИНТЕГРАЛЬНОЙ ЗОНЫ ПОРАЖЕНИЯ ГРУППИРОВКИ ОГНЕВЫХ СРЕДСТВ | 2010 |
|
RU2430384C1 |
| РАЗНЕСЕННАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ, СОПРОВОЖДЕНИЯ И ПОДСВЕТА ЦЕЛЕЙ | 2008 |
|
RU2374596C1 |
| САМОХОДНАЯ ОГНЕВАЯ УСТАНОВКА ОБНАРУЖЕНИЯ, СОПРОВОЖДЕНИЯ И ПОДСВЕТА ЦЕЛЕЙ, НАВЕДЕНИЯ И ПУСКА РАКЕТ ЗЕНИТНОГО РАКЕТНОГО КОМПЛЕКСА СРЕДНЕЙ ДАЛЬНОСТИ | 2002 |
|
RU2208213C1 |
| САМОХОДНАЯ ОГНЕВАЯ УСТАНОВКА ОБНАРУЖЕНИЯ, СОПРОВОЖДЕНИЯ И ПОДСВЕТА ЦЕЛЕЙ, НАВЕДЕНИЯ И ПУСКА РАКЕТ ЗЕНИТНОГО РАКЕТНОГО КОМПЛЕКСА СРЕДНЕЙ ДАЛЬНОСТИ | 2007 |
|
RU2333450C1 |
| САМОХОДНАЯ ОГНЕВАЯ УСТАНОВКА ОБНАРУЖЕНИЯ, СОПРОВОЖДЕНИЯ И ПОДСВЕТА ЦЕЛЕЙ, НАВЕДЕНИЯ И ПУСКА РАКЕТ ЗЕНИТНОГО РАКЕТНОГО КОМПЛЕКСА СРЕДНЕЙ ДАЛЬНОСТИ | 2002 |
|
RU2223459C1 |
| САМОХОДНАЯ ОГНЕВАЯ УСТАНОВКА ОБНАРУЖЕНИЯ, СОПРОВОЖДЕНИЯ И ПОДСВЕТА ЦЕЛЕЙ, НАВЕДЕНИЯ И ПУСКА РАКЕТ ЗЕНИТНОГО РАКЕТНОГО КОМПЛЕКСА СРЕДНЕЙ ДАЛЬНОСТИ | 2012 |
|
RU2518389C1 |
| АППАРАТУРА ПРИЕМА И РЕАЛИЗАЦИИ ЦЕЛЕУКАЗАНИЯ | 2002 |
|
RU2236666C2 |


Изобретение относится к области оборонной техники, в частности к мобильным зенитным ракетным комплексам, и может быть использовано для организации противовоздушной обороны войск и военных объектов от поражения средствами воздушного нападения противника. Технический результат заключается в увеличении дальней границы обнаружения низколетящих целей. Технический результат достигается тем, что мобильный зенитный ракетный комплекс для обнаружения и поражения аэродинамических, баллистических целей и крылатых ракет в составе последовательно соединенных станции обнаружения целей, пункта боевого управления, содержащего аппаратуру приемо-передачи данных, второй выход которой соединен с цифровой вычислительной системой пункта боевого управления, установки с радиолокатором подсвета и наведения, пусковой установки, содержащей последовательно соединенные аппаратуру приемо-передачи данных, цифровую вычислительную систему пусковой установки, поворотную пусковую установку, зенитные управляемые ракеты с полуактивным или активным методами наведения. При этом третий вход цифровой вычислительной системы пусковой установки соединен с выходом системы навигации, топопривязки и ориентирования. Дополнительно введен воздушный носитель с радиолокатором подсвета и наведения, содержащий последовательно соединенные многофункциональную радиолокационную станцию, цифровую вычислительную систему и аппаратуру приемо-передачи данных воздушного носителя, при этом выход аппаратуры приемо-передачи данных воздушного носителя соединен со входом аппаратуры приемо-передачи данных пункта боевого управления. Второй вход цифровой вычислительной системы воздушного носителя соединен с выходом навигационного процессора, первый вход которого соединен с выходом приемного устройства обработки радионавигационных сигналов, а второй вход соединен с выходом инерциальной системы, и в состав пункта боевого управления введены последовательно-соединенные приемное устройство обработки радионавигационных сигналов и навигационный процессор пункта боевого управления, выход которого соединен со вторым входом цифровой вычислительной системы пункта боевого управления. 7 ил., 1 табл.
Мобильный зенитный ракетный комплекс для обнаружения и поражения аэродинамических, баллистических целей и крылатых ракет в составе последовательно соединенных станции обнаружения целей, пункта боевого управления, содержащего аппаратуру приема-передачи данных, второй выход которой соединен с цифровой вычислительной системой пункта боевого управления, установки с радиолокатором подсвета и наведения, пусковой установки, содержащей последовательно соединенные аппаратуру приема-передачи данных, цифровую вычислительную систему пусковой установки, поворотную пусковую установку, зенитные управляемые ракеты с полуактивным или активным методами наведения, при этом третий вход цифровой вычислительной системы пусковой установки соединен с выходом системы навигации, топопривязки и ориентирования, отличающийся тем, что дополнительно введен воздушный носитель с радиолокатором подсвета и наведения, содержащий последовательно соединенные многофункциональную радиолокационную станцию, цифровую вычислительную систему и аппаратуру приема-передачи данных воздушного носителя, при этом выход аппаратуры приема-передачи данных воздушного носителя соединен со входом аппаратуры приема-передачи данных пункта боевого управления, а второй вход цифровой вычислительной системы воздушного носителя соединен с выходом навигационного процессора, первый вход которого соединен с выходом приемного устройства обработки радионавигационных сигналов, а второй вход соединен с выходом инерциальной системы, и в состав пункта боевого управления введены последовательно соединенные приемное устройство обработки радионавигационных сигналов и навигационный процессор пункта боевого управления, выход которого соединен со вторым входом цифровой вычислительной системы пункта боевого управления.
| Зенитные ракетные комплексы ПВО сухопутных войск | |||
| Техника и вооружение вчера, сегодня, завтра | |||
| Металлический водоудерживающий щит висячей системы | 1922 |
|
SU1999A1 |
| ЗЕНИТНЫЙ РАКЕТНО-ПУШЕЧНЫЙ КОМПЛЕКС | 1998 |
|
RU2131577C1 |
| СТЕКЛО ДЛЯ ВЫРАБОТКИ ВОЛОКНА | 2002 |
|
RU2225851C1 |
| US 6343534 B1, 05.02.2002 | |||
| US 3946640 А, 30.03.1976. | |||

