Изобретение относится к экспериментальной гидродинамике и предназначено для измерения упора и крутящего момента на гребных валах судов с винтом регулируемого шага в натурных условиях без предварительной градуировки измерительного участка вала.
Известен способ измерения упора и крутящего момента на гребном валу судна, заключающийся в калибровке на швартовом режиме измерительной схемы, преобразовании деформаций гребного вала в электрические сигналы с помощью закрепленных на нем тензорезисторов, соединенных в мостовые схемы датчиков упора и крутящего момента, измерении выходных сигналов этих датчиков на режимах движения судна и определении упора и крутящего момента гребного винта судна расчетным путем (см. патент РФ N 2017097), принятый за прототип.
Недостатком известного способа является низкая точность измерения упора, обусловленная влиянием крутящего момента, вследствие угловых ошибок ориентации тензорезисторов на гребном валу, и недостаточной точностью калибровки измерительной схемы на швартовом режиме вследствие сравнительно небольших амплитуд деформаций гребного вала, возбуждаемых при крутильных колебаниях, и влияния на них изгибных деформаций вала.
Заявляемое изобретение решает задачу повышения точности и достоверности измерительного упора и крутящего момента.
Для этого по известному способу гребному винту на швартовном режиме последовательно задают не менее 3-х значений частоты вращения в диапазоне от 40 до 100% ее номинального значения и поддерживают ее постоянной на заданном значении, изменяют при каждом значении частоты вращения шаг установки лопастей, выставляя их в 3 - 4 положения вблизи шага нулевого упора, включающих шаг нулевого упора по судовому указателю, шаг заднего хода и один-два шага переднего хода и измеряют при этом выходные сигналы датчиков упора Uтi и крутящего момента Uqi, шаг установки лопастей Xi по судовому указателю шага и частоту вращения гребного вала n, затем по данным измерений выходных сигналов датчиков упора и крутящего момента для каждого значения шага установки лопастей Xi строят зависимости Uтi и Uqi от квадрата частоты вращения вала, используя метод наименьших квадратов, аппроксимируют полученные зависимости соответствующими прямыми, определяют начальные отсчеты Uт0 и Uq0 датчиков упора и крутящего момента как точку пересечения этих прямых с осью, по которой отложены выходные сигналы датчиков, определяют гидродинамические коэффициенты упора Yтi = (Uтi - Uт0)/n2 и крутящего момента Yqi = (Uqi - Uq0)/n2 гребного вала и в прямоугольной системе координат X, Y строят зависимости величин Yтi и Yqi от шага установки лопастей Xi, используя метод наименьших квадратов аппроксимируют полученные зависимости соответственно прямой и параболой вида Yq = Yq0 + a(X - X0)2, где a - коэффициент аппроксимации, по кривой Yq(X) определяют фактический шаг нулевого упора X0 и значение минимума Yq0 кривой Yq(X), соответствующее фактическому шагу нулевого упора X0, определяют ординату Yт0 на прямой Yт(X), соответствующую фактическому шагу нулевого упора X0, электрически калибруют датчик упора и крутящего момента путем подключения параллельно сопротивлению R плеча тензорезисторного моста калибровочного резистора Rкал и измеряют выходные сигналы датчиков Uкал.т, Uкал.q при калибровке, а значения упора и крутящего момента гребного винта на режимах движения судна находят по формулам:
T = Aт[(Uт - Uт0) - Kтq(Uq - Uq0)]/Uкал.т,
Q = Aq(Uq - Uq0/Uкал.q,
где T, Q - упор и крутящий момент гребного винта соответственно,
Aт = FGR/KтRкал - постоянная, характеризующая датчик упора,
Aq = 2WpGR/KтRкал - постоянная, характеризующая датчик крутящего момента,
F, Wp - площадь сечения и момент сопротивления вала на скручивание в месте установки тензорезисторов моста управления и моста крутящего момента соответственно,
G - модуль сдвига материала гребного вала,
R - сопротивление плеча тензорезисторного моста,
Kт - коэффициент тензочувствительности тензорезисторов,
Rкал - сопротивление калибровочного резистора,
Uт, Uq - напряжения на выходе датчиков упора и крутящего момента соответственно на режимах движения судна,
Uт0, Uq0 - выходной сигнал датчика упора и крутящего момента соответственно при неподвижном вале (начальный отсчет),
Kтq = Yт0/Yq0 - коэффициент влияния крутящего момента на показания датчика упора,
Yт0, Yq0 - гидродинамические коэффициенты упора и крутящего момента вала соответственно, соответствующие фактическому шагу нулевого упора,
Uкал.т, Uкал.q - напряжения на выходе датчиков упора и крутящего момента соответственно при калибровке.
При вращении гребного винта на нем возникают упор и крутящий момент, которые передаются гребному валу и измеряются датчиками упора и крутящего момента. На швартовном режиме вращение винта можно рассматривать как движение в равномерном поле скоростей жидкости, при этом отсутствуют нестационарные гидродинамические силы и моменты. Калибровка измерительной схемы на швартовном режиме заключается в том, что гребной вал в таком режиме при постоянной частоте вращения нагружаются постоянными по величине гидродинамическими упором и крутящим моментом, при этом их величина пропорциональна квадрату частоты вращения. Установив лопасти винта регулируемого шага (ВРШ) на шаг нулевого упора, возбуждают на гребном винте и соответственно в гребном вале только крутящий момент. Учитывая, что внешний указатель шага (ВУШ) может быть сбит относительно положения шага лопастей, лопасти выставляют в 3 - 4 положения вблизи шага нулевого упора, включая шаг нулевого упора по судовому указателю, шаг заднего хода и один - два шага переднего хода.
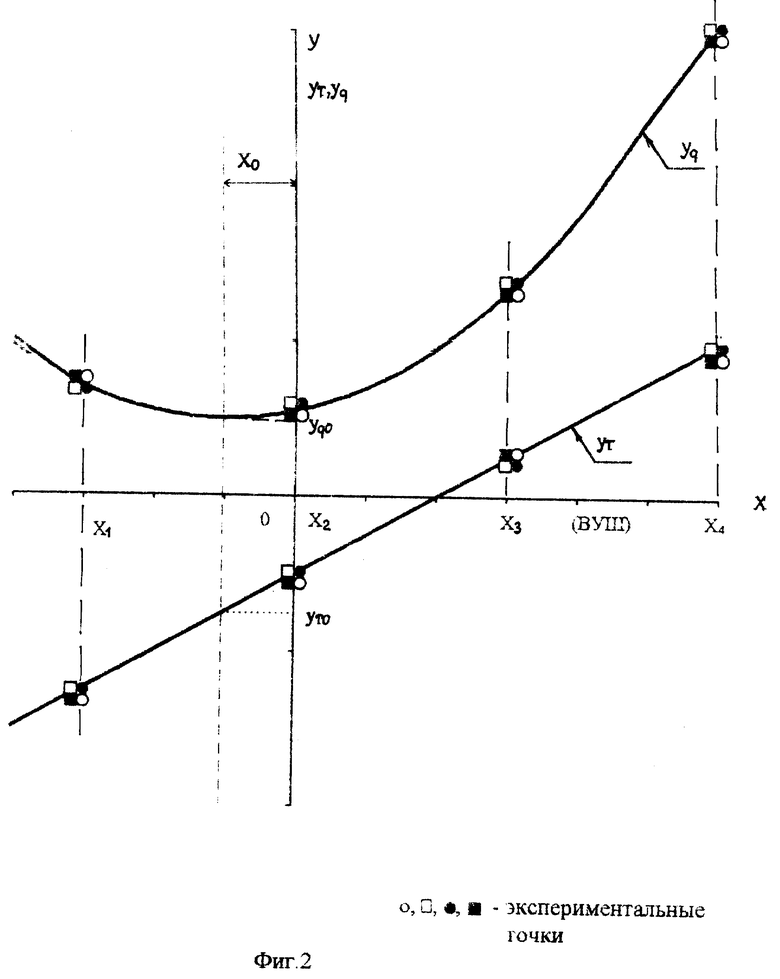
Строят зависимости Uтi и Uqi от квадрата частоты вращения вала для каждого значения шага установки лопастей Xi. Используя метод наименьших квадратов, аппроксимируют полученные зависимости соответствующими прямыми и определяют начальные отсчеты Tт0 и Uq0 датчиков упора и крутящего момента как точку пересечения этих прямых с осью, по которой отложены выходные сигналы датчиков (см. фиг. 1). Очевидно, что для такого построения прямых эксперимент должен быть проведен не менее чем на 3-х ступенях частоты вращения. Начальные отсчеты Uт0 и Uq0 соответствуют показаниям датчиков упора и крутящего момента при ненагруженном гидродинамическими силами и моментами вале. Такое состояние гребной вал имеет при достижении частоты вращения n = 0 и одновременном устранении путем вращения вала случайных напряжений в нем из-за изгиба, закусывания вала при остановке, трения в уплотнении и подшипниках. Начальные отсчеты могут быть также получены при очень малой частоте вращения гребного вала, когда гидродинамические нагрузки от гребного винта практически равны нулю. Очевидно, что при ненагруженном гидродинамическими силами и моментами вале начальные отсчеты Uт0 и Uq0 должны быть постоянными, независимо от шага, на который установлены лопасти ВРШ. Таким образом, прямые Uт(n2) и Uq(n2) для разных ВУШ должны пересечься друг с другом на оси ординат в одной точке Uт0 и Uq0. Указанное обстоятельство позволяет даже при незначительном количестве экспериментальных точек Uтi и Uqi при каждом ВУШе иметь достаточно высокую точность определения начальных отсчетов.
После нахождения начальных отсчетов Uт0 и Uq0 определяют гидродинамические коэффициенты упора Yтi = (Uтi - Uт0)/n2 и крутящего момента Yqi = (Uqi - Uq0)/n2 гребного винта. Испытания систематических серий моделей гребных винтов в опытных бассейнах и кавитационных трубах позволили произвести математическую аппроксимацию гидродинамических коэффициентов степенными функциями (см. например, Справочник по теории корабля, т. 1, Ленинград, Судостроение, 1985 г., стр. 474 - 490). При этом гидродинамические коэффициенты гребного винта в зависимости от шагового отношения с достаточной для практики точностью могут быть аппроксимированы вблизи шага нулевого упора следующими функциями: квадратичной параболой для гидродинамического коэффициента момента и прямой линией для коэффициента упора.
По данным измерений выходного сигнала датчика крутящего момента Uqi определяют гидродинамический коэффициент крутящего момента Yqi = (Uqi - Uq0)/n2 и в прямоугольной системе координат X, Y строят зависимость Yqi от шага установки лопастей Xi. Используя метод наименьших квадратов, аппроксимируют полученную зависимость параболой (см. фиг. 2) вида Yqi = Yq0 + a(X - X0)2. При этом все экспериментальные точки Uqi, пересчитанные для гидродинамического коэффициента Yqi при разных значениях частот вращения винта n, будут принадлежать одной параболе. Минимум этой параболы Yq0 соответствует фактическому шагу нулевого упора X0. Поскольку фактическое (истинное) положение шага нулевого упора может быть сдвинуто относительно судового указателя шага ВУШ в ту или иную сторону, измерения момента должны выполняться как при шагах переднего, так и заднего хода. Критерием прохождения через фактический шаг нулевого упора будет являться увеличение абсолютной величины крутящего момента на обеих ветвях параболы. Построение параболы по экспериментальным точкам методом наименьших квадратов позволяет минимизировать погрешности, связанные с трением в системе перекладки шага лопастей, и с максимально возможной точностью определять шаг нулевого упора X0 и соответствующее ему значение крутящего момента Yq0.
Измерения выполняют не менее чем на 3-х значениях частоты вращения гребного винта в диапазоне от 40 до 100% ее номинального значения. Указанный динамический диапазон частоты вращения выбран в связи с тем, что гидродинамические нагрузки на винте растут пропорционально квадрату частоты вращения гребного винта. Очевидно, что с увеличением гидродинамических нагрузок растет и точность их измерения. Для частот вращения гребного винта ниже 40% гидродинамические нагрузки на винте и на гребном валу сравнительно небольшие и погрешность их измерения увеличивается.
По данным измерений выходного сигнала датчика упора Uтi определяют гидродинамический коэффициент упора Yтi = (Uтi - Uт0)/n2 и в зависимости от шага установки лопастей Xi строят в прямоугольной системе координат X, Y, используя метод наименьших квадратов, прямую линию (см. фиг. 2). При этом все экспериментальные точки, полученные для разных значений частот вращения винта n, будут принадлежать одной прямой Yтi(Xi).
Наличие упора Yт0 в положении лопастей, соответствующем шагу нулевого упора X0, свидетельствует о влиянии крутящего момента на показания датчика упора, так как гидродинамический упор в этом положении лопастей должен быть равен нулю (строго говоря, близок к нулю). Это влияние обусловлено ошибками в ориентации тензорезисторов моста упора на гребном валу. При этом выходной сигнал датчика упора, в отсутствии последнего, растет пропорционально величине крутящего момента (см., например, О.Н. Беззубик, Повышение точности измерения упора гребного винта судов, вып. 32, 1982 г.). Степень влияния крутящего момента на показания датчика упора определяется отношением Yт0/Yq0.
Электрическую калибровку датчиков упора и крутящего момента путем подключения калибровочного резистора параллельно сопротивлению плеча тензорезисторного моста выполняют с тем, чтобы заменить измерения напряжения питания мостовых цепей датчиков и коэффициентов усиления, встроенных в измерительные датчики усилителей на более простую и выполняемую с высокой точностью процедуру измерения выходного сигнала датчика в процессе электрической калибровки. Используемые при этом в расчетных формулах для нахождения упора и крутящего момента величины сопротивлений тензорезистора и калибровочного резистора определены паспортом завода-изготовителя с высокой точностью.
Сущность заявленного изобретения поясняется чертежами, где на фиг. 1 изображены зависимости выходных сигналов датчиков упора и крутящего момента от квадрата частоты вращения гребного винта для четырех значений ВУШ, на фиг. 2 изображены квадратичная парабола Yq(X) и прямая Yт(X) относительных величин момента и упора, построенные по экспериментальным точкам измерения выходных сигналов датчиков момента и упора, на фиг. 3 изображена блок-схема устройства, реализующая предложенный способ.
Устройство содержит участок гребного винта 1, кинематически связанный с винтом регулируемого шага 2, тензорезисторы, закрепленные на валу гребного винта по осям главных напряжений измеряемых нагрузок и соединенные в мостовые схемы датчиков упора 3 и крутящего момента 4, судовой указатель шага лопастей 5, датчик частоты вращения вала 6, регистраторы выходных сигналов датчика упора 7 и крутящего момента 8.
Способ измерения реализуется следующим образом. При вращении гребного винта на нем развиваются упор T и крутящий момент Q, деформирующие вал гребного винта. Закрепленные на нем тензорезисторы изменяют свое сопротивление и на выходе мостовых схем датчиков упора 3 и крутящего момента 4 возникают электрические напряжения, которые измеряются регистраторами 7 и 8. Ошибки ориентации тензорезисторов мостовой схемы датчика упора 3 приводят к заметному искажению результата измерения упора. Величина и знак ошибки измерения упора зависят от конкретного исполнения датчика упора, то есть от фактических ошибок в ориентации каждого из тензорезисторов моста упора. Для корректировки результата измерения упора выполняют предварительно на швартовном режиме калибровку измерительной схемы описанным выше способом. Для чего задают гребному винту на швартовном режиме последовательно не менее 3-х значений частоты вращения в диапазоне от 40 до 100% ее номинального значения и поддерживают ее постоянной на заданном значении, изменяют при каждом значении частоты вращения шаг установки лопастей, выставляя их в 3 - 4 положения вблизи шага нулевого упора по судовому указателю, измеряют выходные сигналы датчиков Uтi и Uqi. Через экспериментальные точки Uтi и Uqi для каждого значения ВУШ строят прямые линии зависимостей показаний датчиков упора и момента от квадрата частоты вращения (фиг. 1). Определяют начальные отсчеты Uт0 и Uq0 датчиков упора и крутящего момента как точку пересечения этих прямых с осью, по которой отложены выходные сигналы датчиков (фиг. 1). После чего определяют относительные величины Yтi = (Uтi - Uт0)/n2 и Yqi = (Uqi - Uq0)/n2, и по ним методом наименьших квадратов строят квадратичную параболу Yqi(Xi) и прямую Yтi(Xi). Определяют минимум параболы Yq0 и шаг нулевого упора X0 (см. фиг. 2). Затем определяют значение относительно упора Yт0, соответствующее координате X0. Определяют коэффициент влияния крутящего момента на показания датчика упора Kтq = Yт0/Yq0. Выполняют электрическую калибровку датчиков упора и крутящего момента путем подключения параллельно сопротивлению плеча R тензорезисторного моста калибровочного резистора Rкал и измеряют выходные сигналы датчиков при калибровке Uкал.т и Uкал.q. После чего определяют значения упора и крутящего момента на режимах движения судна по формулам:
T = Aт[(Uт - Uт0) - Kтq(Uq - Uq0)]/Uкал.т
Q = Aq(Uq - Uq0)/Uкал.q
Предложенный способ обеспечивает достаточно высокую точность измерения упора и крутящего момента гребного винта судна даже без предварительной стендовой градуировки участка вала с тензорезисторными мостами. Расчетная погрешность измерения крутящего момента не превышает ±(2,5 - 3)%, упора ±(5 - 10)%.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТАНОВКА ДЛЯ ИСПЫТАНИЙ МОДЕЛЕЙ СУДОВЫХ ДВИЖИТЕЛЕЙ | 2001 |
|
RU2216476C2 |
| СТЕНД ДЛЯ ОПРЕДЕЛЕНИЯ УСИЛИЙ РЕЗАНИЯ ГРУНТА | 1999 |
|
RU2158422C1 |
| ДИНАМОМЕТР ДЛЯ ИЗМЕРЕНИЯ УСИЛИЙ НА МОДЕЛИ ГРЕБНОГО ВИНТА РЕГУЛИРУЕМОГО ШАГА | 1995 |
|
RU2104505C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК МОМЕНТОМЕРОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2180101C2 |
| ВОДОМЕТНЫЙ ДВИЖИТЕЛЬ | 1999 |
|
RU2176208C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ОСЕВОГО УСИЛИЯ И КРУТЯЩЕГО МОМЕНТА ГРЕБНОГО ВИНТА СУДНА | 1996 |
|
RU2115900C1 |
| НИЗКООБОРОТНЫЙ ГРЕБНОЙ ВИНТ | 2007 |
|
RU2369520C2 |
| УСТРОЙСТВО ДЛЯ БУКСИРОВОЧНЫХ ИСПЫТАНИЙ МОДЕЛИ МОРСКОГО ИНЖЕНЕРНОГО СООРУЖЕНИЯ В ОПЫТОВОМ БАССЕЙНЕ | 2005 |
|
RU2308397C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОСЕВОГО УСИЛИЯ И КРУТЯЩЕГО МОМЕНТА | 1991 |
|
RU2017097C1 |
| ГРЕБНОЙ ВИНТ | 2003 |
|
RU2244657C1 |

Изобретение относится к экспериментальной гидродинамике и предназначено для измерения упора и крутящего момента на гребных валах судов с винтом регулируемого шага в натурных условиях без предварительной градуировки измерительного участка вала. Способ заключается в задании нескольких значений частоты вращения гребного вала и шага установки лопастей, измерении соответствующих выходных сигналов с датчиков упора и крутящего момента и определении по соответствующим формулам фактических значений упора и крутящего момента гребного вала судна на основании соответствующих зависимостей, построенных по результатам упомянутых измерений. Данное изобретение позволяет повысить точность и достоверность измерения упора и крутящего момента гребного вала судна. 3 ил.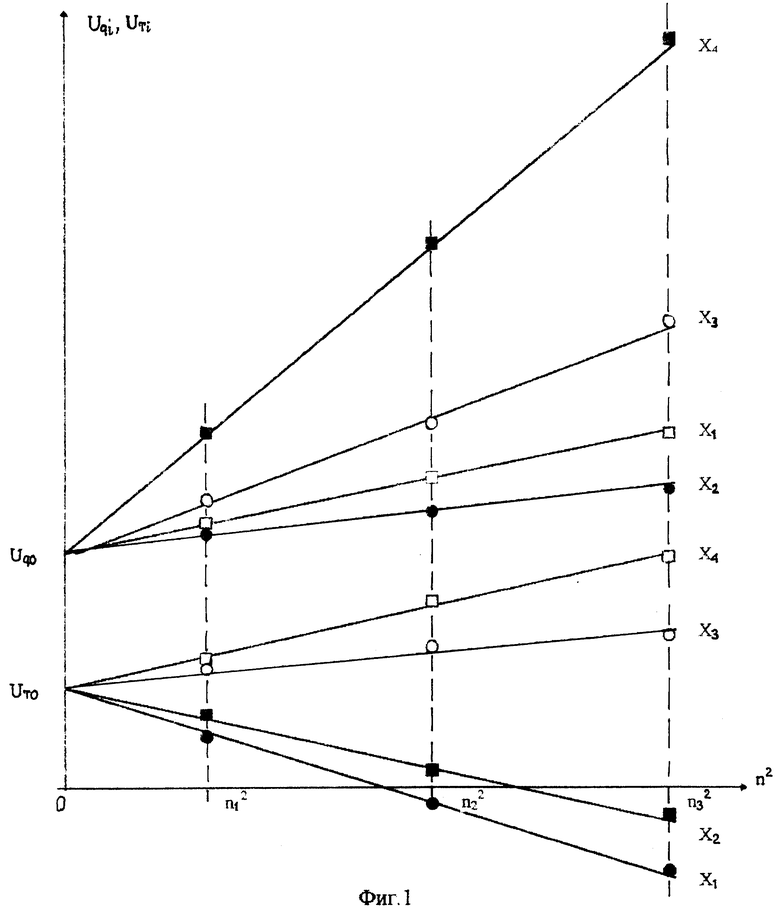
Способ измерения упора и крутящего момента на гребном валу судна с винтом регулируемого шага, заключающийся в калибровке измерительной схемы на швартовном режиме, преобразовании деформаций гребного вала в электрические сигналы с помощью закрепленных на нем тензорезисторов, соединенных в мостовые схемы датчиков упора и крутящего момента, измерении выходных сигналов этих датчиков на режимах движения судна, шага установки лопастей по судовому указателю шага, частоты вращения вала и определении упора и крутящего момента гребного винта судна расчетным путем, отличающийся тем, что гребному валу на швартовном режиме последовательно задают не менее трех значений частоты вращения в диапазоне от 40 до 100% ее номинального значения и поддерживают ее постоянной на заданном значении, изменяют при каждом значении частоты вращения шаг установки лопастей, выставляя их в три - четыре положения вблизи шага нулевого упора, включающих шаг нулевого упора по судовому указателю, шаг заднего хода и один - два шага переднего хода и измеряют при этом выходные сигналы датчиков упора Uтi и крутящего момента Uqi, шаг установки лопастей Xi по судовому указателю шага и частоту вращения гребного вала n, затем по данным измерений выходных сигналов датчиков упора и крутящего момента для каждого значения шага установки лопастей Xi строят зависимости Uтi и Uqi от квадрата частоты вращения вала, используя метод наименьших квадратов аппроксимируют полученные зависимости соответствующими прямыми, определяют начальные отсчеты Uт0 и Uq0 датчиков упора и крутящего момента как точку пересечения этих прямых с осью, по которой отложены выходные сигналов датчиков, определяют гидродинамические коэффициенты упора Yтi = (Uтi - Uт0)/n2 и крутящего момента Yqi = (Uqi - Uq0)/n2 гребного вала и в прямоугольной системе координат X,Y строят зависимости величин Yтi и Yqi от шага установки лопастей Xi, используя метод наименьших квадратов аппроксимируют полученные зависимости соответственно прямой и параболой вида Yq = Yq0 + a(X - X0)2, где a - коэффициент аппроксимации, по кривой Yq(X) определяют фактический шаг нулевого упора X0 и значение минимума Yq0 кривой Yq(X), соответствующее фактическому шагу нулевого упора X0, определяют ординату Yт0 на прямой Yт(X), соответствующую фактическому шагу нулевого упора X0, электрически калибруют датчики упора и крутящего момента путем подключения параллельно сопротивлению R плеча тензорезисторного моста калибровочного резистора Rкал и измеряют выходные сигналы датчиков Uкал.т, Uкал.q при калибровке, а значения упора и крутящего момента гребного винта на режимах движения судна находят по формулам
T = Aт[(Uт - Uт0) - Kтq(Uq - Uq0)]/Uкал.т,
Q = Aq(Uq - Uq0)/Uкал.q,
где T, Q - упор и крутящий момент гребного винта соответственно;
Aт = FGR/KтRкал - постоянная, характеризующая датчик упора;
Aq = 2WpGR/KтRкал - постоянная, характеризующая датчик крутящего момента;
F, Wp - площадь сечения и момент сопротивления вала на скручивание в месте установки тензорезисторов моста упора и крутящего момента соответственно;
G - модуль сдвига материала гребного вала;
R - сопротивление плеча тензорезистивного моста;
Kт - коэффициент тензочувствительности тензорезисторов;
Rкал - сопротивление калибровочного резистора;
Uт, Uq - напряжения на выходе датчиков упора и крутящего момента соответственно на режимах движения судна;
Uт0, Uq0 - выходной сигнал датчиков упора и крутящего момента соответственно при неподвижном вале (начальный отсчет);
Kтq = Yт0/Yq0 - коэффициент влияния крутящего момента на показания датчика упора;
Yт0, Yq0 - гидродинамические коэффициенты упора и крутящего момента гребного вала соответственно соответствующие фактическому шагу нулевого упора;
Uкал.т, Uкал.q - напряжения на выходе датчиков упора и крутящего момента соответственно при калибровке.
| КУЛАГИН В.Д | |||
| Теория и устройство промысловых судов, 2-е изд | |||
| - Л.: Судостроение, 1986, с | |||
| Фотореле для аппарата, служащего для передачи на расстояние изображений | 1920 |
|
SU224A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОСЕВОГО УСИЛИЯ И КРУТЯЩЕГО МОМЕНТА | 1991 |
|
RU2017097C1 |
| Способ измерения осевого усилия гребного винта судна и устройство для его осуществления | 1986 |
|
SU1362969A1 |
| Способ измерения осевого усилия и крутящего момента гребного винта судна и устройство для его осуществления | 1990 |
|
SU1756776A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ОСЕВОГО УСИЛИЯ И КРУТЯЩЕГО МОМЕНТА ГРЕБНОГО ВИНТА СУДНА | 1996 |
|
RU2115900C1 |
| US 4246780 A, 27.01.1981 | |||
| US 5524494 A, 11.01.1996 | |||
| УСТАНОВКА ДЛЯ ИЗМЕРЕНИЯ СИЛ И МОМЕНТОВ ПРИ ИСПЫТАНИИ ЛОПАСТЕЙ ВОЗДУШНЫХ ВИНТОВ | 1990 |
|
RU2035029C1 |
| Распылитель жидкости | 1986 |
|
SU1331581A2 |
