Изобретение относится к радиотехнике и может быть использовано в системах определения местоположения объекта.
Известен способ дистанционного определения координат объектов, заключающийся в излучении сигналов основным активным объектом, приеме излученных сигналов на первом и втором маяках, запоминании фазы, задержке и переизлучении сигналов с разделением по времени первым и вторым маяками, приеме на основном активном объекте сигналов основного активного объекта, переизлученных первым и вторым маяками, определении дальностей от основного активного объекта до первого и второго маяков по времени задержки между сигналом основного активного объекта и сигналами, переизлученными первым и вторым маяками, отличающийся тем, что на каждом из k активных объектов принимают сигналы, излученные как основным активным объектом, так и переизлученные первым и вторым маяками сигналы основного активного объекта, запоминают фазы принятых сигналов, задерживают и их переизлучают с разделением по времени, принимают на основном активном объекте сигналы, переизлученные каждым из k активных объектов и определяют на основном активном объекте дальности от каждого из k активных объектов как до основного активного объекта, так и до первого и второго маяков по времени задержки между сигналом основного активного объекта и сигналами, переизлученными каждым из k активных объектов [1].
Данный способ позволяет дистанционно определять координаты подвижных объектов. Недостатком способа является отсутствие скрытности работы станций, определяющих местоположение k активных объектов, а также невозможность проведения одновременных измерений на данных станциях для дистанционных определений координат.
Известен способ определения координат станции, заключающийся в излучении сигналов опорной станцией 1 (ведущей станцией в прототипе), приеме излученных сигналов на опорной станции 2 и опорной станции 3 (ведомой станции 1 и ведомой станции 2 в прототипе), запоминании фазы, задержке и переизлучении сигналов с разделением по времени опорной станцией 2 и опорной станцией 3, приеме на пассивной станции (судовой приемной станции в прототипе) сигналов опорной станции 1, а также сигналов опорной станции 1, переизлученных опорной станцией 2 и опорной станцией 3, определении на пассивной станции разности дальностей от пассивной станции до ведущих станций 1 и 2 и разности дальностей от пассивной станции до ведущих станций 1 и 3 [2, с. 29, 30].
Данный способ позволяет определять местоположение неограниченного числа пассивных станций. Недостатком способа является невозможность дистанционного определения координат подвижных станций.
Цель изобретения - расширение функциональных возможностей за счет дистанционного определения пассивными станциями местоположения активных необслуживаемых станций.
Для этого в способе определения координат станции, заключающемся в излучении сигналов опорной станцией 1, приеме излученных сигналов на опорной станции 2, используется работа опорной станции 2 в режиме запоминания и хранения фазы, на каждой из k активных необслуживаемых станций принимают излученный опорной станцией 1 сигнал, запоминают фазу, задерживают и переизлучают сигнал, принимают на опорной станции 1 сигналы, излученные каждой из k активных необслуживаемых станций, запоминают фазы принятых сигналов, задерживают и переизлучают сигналы с разделением по времени, принимают на каждой из n пассивных станций сигнал, излученный опорной станцией 1, сигналы, излученные каждой из k активных необслуживаемых станций, а также сигналы от каждой из k активных необслуживаемых станций, переизлученные опорной станцией 1, определяют на g-й пассивной станции дальности от опорной станции 1 до каждой из k активных необслуживаемых станций, переизлучают на опорной станции 2 сигнал, принятый от опорной станции 1, принимают на опорной станции 3 сигнал, излученный опорной станцией 2, запоминают фазу, на каждой из k активных необслуживаемых станций принимают излученный опорной станцией 2 сигнал, запоминают фазу, задерживают и переизлучают сигнал, принимают на опорной станции 2 сигналы, излученные каждой из k активных необслуживаемых станций, запоминают фазы принятых сигналов, задерживают и переизлучают сигналы с разделением по времени, принимают на каждой из n пассивных станций сигнал, излученный опорной станцией 2, сигналы, излученные каждой из k активных необслуживаемых станций, а также сигналы от каждой из k активных необслуживаемых станций, переизлученные опорной станцией 2, определяют на g-й пассивной станции дальности от опорной станции 2 до каждой из k активных необслуживаемых станций, переизлучают на опорной станции 3 сигнал, принятый от опорной станции 2, на каждой из k активных необслуживаемых станций принимают излученный опорной станцией 3 сигнал, запоминают фазу, задерживают и переизлучают сигнал, принимают на опорной станции 3 сигналы, излученные каждой из k активных необслуживаемых станций, запоминают фазы принятых сигналов, задерживают и переизлучают сигналы с разделением по времени, принимают на каждой из n пассивных станций сигнал, излученный опорной станцией 3, сигналы, излученные каждой из k активных необслуживаемых станций, а также сигналы от каждой из k активных необслуживаемых станций, переизлученные опорной станцией 3, определяют на g-й пассивной станции дальности от опорной станции 3 до каждой из k активных необслуживаемых станций, дальность от g-й пассивной станции до опорной станции 1, дальность от g-й пассивной станции до опорной станции 2, дальность от g-й пассивной станции до опорной станции 3, дальности от g-й пассивной станции до каждой из k активных необслуживаемых станций.
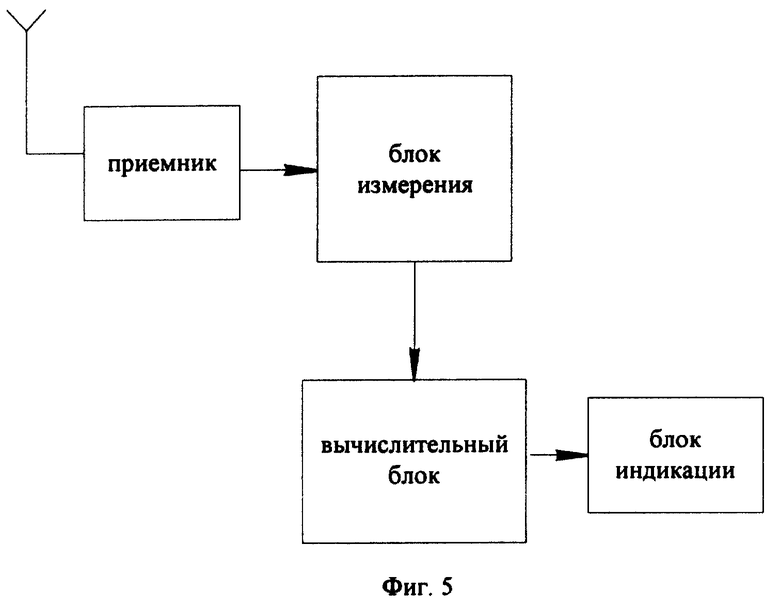
На фиг. 1 представлена структурная схема системы дистанционного определения координат активных необслуживаемых станций на пассивных станциях, реализующая предложенный способ, на фиг. 2 - временная диаграмма работы системы, на фиг. 3 - структурная схема каждой из опорных станций 1, 2, 3, на фиг. 4 - структурная схема каждой из k активных необслуживаемых станций, на фиг. 5 - структурная схема каждой из n пассивных станций, на фиг. 6 - блок-схема алгоритма работы вычислительного блока каждой из n пассивных станций.
На фиг. 1, 2 следующие обозначения:
ОС 1 - опорная станция 1,
ОС 2 - опорная станция 2,
ОС 3 - опорная станция 3,
АНС 1 - активная необслуживаемая станция 1,
АНС 2 - активная необслуживаемая станция 2,
АНС k - активная необслуживаемая станция k,
ПС 1 - пассивная станция 1,
ПС 2 - пассивная станция 2,
ПС n - пассивная станция n.
Способ дистанционного определения координат активных необслуживаемых станций на пассивных станциях состоит в следующем. На опорной станции ОС 1 излучают сигнал в интервал времени 1 (см. фиг. 2 а). Во время указанного интервала запоминают фазу принятого сигнала на станциях ОС 2, АНС 1, АНС 2, . .., АНС k (см. фиг. 2 б, г, д, е), а также на станциях ПС 1, ПС 2, ..., ПС n (см. фиг. 2 ж, з, и). В интервалы времени 2, 3, ..., p1 станции АНС 1, АНС 2, . . . , АНС k поочередно производят переизлучение принятого сигнала (см. фиг. 2 г, д, е). Сигналы, излученные АНС 1, АНС 2, ..., АНС k, принимают на ПС 1, ПС 2, ..., ПС n (см. фиг. 2 ж, з, и), а также на ОС 1, и в интервалы времени р2, р3, ..., q1 на ОС 1 поочередно производят их переизлучение (см. фиг. 2 а). Переизлученные ОС 1 сигналы принимаются на ПС 1, ПС 2, ..., ПС n (см. фиг. 2 ж, з, и).
Согласно [2. с. 22], если в интервал времени 1 ОС 1 излучает сигнал с текущей фазой ωt+ψ0, где ω - циклическая частота гармонического колебания, t - время, ψ0 - начальная фаза, текущую фазу сигнала, принятого на АНС i, где i∈{1,...,k}, можно представить в виде ωt+ψ0-(ω/c)•r1i, где c - скорость распространения радиоволн, r1i - расстояние от ОС 1 до АНС i, а текущую фазу сигнала, принятого на ПС g, где g∈{1,...,n}, можно представить в виде ωt+ψ0-(ω/c)•r1g, где r1g - расстояние от ОС 1 до ПС g. Тогда текущая фаза сигнала, излученного АНС i и принятого на ОС 1 в один из интервалов времени 2, 3, ..., p1, равна ωt+ψ0-(ω/c)•2r1i, а текущая фаза данного сигнала, переизлученного ОС 1 в один из интервалов времени р2, р3, ..., q1 и принятого на ПС g, равна ωt+ψ0-(ω/c)•(2r1i+r1g). Текущую фазу сигнала, излученного АНС i в один из интервалов времени 2, 3, ..., p1, и принятого на ПС g, можно представить в виде ωt+ψ0-(ω/c)•(r1i+rig), где rig - расстояние от АНС i до ПС g.
Таким образом, по прошествии временного интервала q1, ПС g (g∈{1,...,n}) имеет всю необходимую информацию для определения дальности r1i, где i∈{1,...,k}. Дальности r1i находят по следующим фазам запаздывания, определяемым по разностям измеренных параметров:
Поскольку величины ω и с известны, очевидно, что возможно определение дальностей r1i, где i∈{1,...,k}, из (1). По измеренным параметрам ωt+ψ0-(ω/c)•r1g и ωt+ψ0-(ω/c)•(r1i+rig) и при известных величинах ω , с и найденном r1i возможно определение параметра -(ω/c)•r1g+(ω/c)•rig:
В интервал времени q2 на опорной станции ОС 2 переизлучают сигнал (см. фиг. 2 б), принятый от ОС 1 во временном интервале 1. Во временном интервале q2 запоминают фазу принятого сигнала на станциях ОС 3, АНС 1, АНС 2, ..., АНС k (см. фиг. 2 в, г, д, е), а также на станциях ПС 1, ПС 2, ..., ПС n (см. фиг. 2 ж, з, и). В интервалы времени q3, q4, ..., s1 станции АНС 1, АНС 2, . . . , АНС k поочередно производят переизлучение принятого сигнала (см. фиг. 2 г, д, е). Сигналы, излученные АНС 1, АНС 2, ..., АНС k принимают на ПС 1, ПС 2, ... ПС n (см. фиг. 2 ж, з, и), а также на ОС 2, и в интервалы времени s2, s3, ..., u1 на ОС 2 поочередно производят их переизлучение (см. фиг. 2 б). Переизлученные ОС 2 сигналы принимаются на ПС 1, ПС 2, ..., ПС n (см. фиг. 2 ж, з, и).
При излучении в интервал времени q2 на ОС 2 сигнала с текущей фазой ωt+ψ1, где ψ1 - начальная фаза, текущую фазу сигнала, принятого на АНС i, где i∈{1,...,k}, можно представить в виде ωt+ψ1-(ω/c)•r2i, где r2i - расстояние от ОС 2 до АНС i, а текущую фазу сигнала, принятого на ПС g, где (g∈{1,...,n}), можно представить в виде ωt+ψ1-(ω/c)•r2g, где r2g - расстояние от ОС 2 до ПС g. Тогда текущая фаза сигнала, излученного АНС i и принятого на ОС 2 в один из интервалов времени q3, q4, ..., s1, равна ωt+ψ1-(ω/c)•2r2i, а текущая фаза данного сигнала, переизлученного ОС 2 в один из интервалов времени s2, s3, . .., u1 и принятого на ПС g, равна ωt+ψ1-(ω/c)•(2r2i+r2g). Текущую фазу сигнала, излученного АНС i в один из интервалов времени q3, q4, ..., s1 и принятого на ПС g, можно представить в виде ωt+ψ1-(ω/c)•(r2i+rig), где rig - расстояние от АНС i до ПС g.
Дальности r2i и параметр -(ω/c)•r2g+(ω/c)•rig находят на ПС g (g∈{1,...,n}) из выражений, аналогичных (1), (2):

В интервал времени u2 на опорной станции ОС 3 переизлучают сигнал (см. фиг. 2 в), принятый от ОС 2 во временном интервале q2. Во временном интервале u2 запоминают фазу принятого сигнала на станциях АНС 1, АНС 2, ..., АНС k (см. фиг. 2 г, д, е) и на станциях ПС 1, ПС 2, ..., ПС n (см. фиг. 2 ж, з, и). В интервалы времени u3, u4, ..., v1 станции АНС 1, АНС 2, ..., АНС k поочередно производят переизлучение принятого сигнала (см. фиг. 2 г, д, е). Сигналы, излученные АНС 1, АНС 2, ..., АНС k принимают на ПС 1, ПС 2, ... ПС n (см. фиг. 2 ж, з, и), а также на ОС 3, и в интервалы времени v2, v3, ..., w1 на ОС 3 поочередно производят их переизлучение (см. фиг. 2 в). Переизлученные ОС 3 сигналы принимаются на ПС 1, ПС 2, ..., ПС n (см. фиг. 2 ж, з, и).
При излучении в интервал времени u2 на ОС 3 сигнала с текущей фазой ωt+ψ2, где ψ2/ - начальная фаза, текущую фазу сигнала, принятого на АНС i, где i∈{1,...,k}, можно представить в виде ωt+ψ2-(ω/c)•r3i, где r3i - расстояние от ОС 3 до АНС i, а текущую фазу сигнала, принятого на ПС g, где (g∈{1,...,n}), можно представить в виде ωt+ψ2-(ω/c)•r3g, где r3g - расстояние от ОС 3 до ПС g. Тогда текущая фаза сигнала, излученного АНС i и принятого на ОС 3 в один из интервалов времени u3, u4, ..., v1, равна ωt+ψ2-(ω/c)•2r3i, а текущая фаза данного сигнала, переизлученного ОС 3 в один из интервалов времени v2, v3, . .., w1 и принятого на ПС g, равна ωt+ψ2-(ω/c)•(2r3i+r3g). Текущую фазу сигнала, излученного АНС i в один из интервалов времени u3, u4, ..., v1 и принятого на ПС g, можно представить в виде ωt+ψ2-(ω/c)•(r3i+rig) где rig - расстояние от АНС i до ПС g.
Дальности r3i и параметр -(ω/c)•r3g+(ω/c)•rig находят на ПС g g∈{1,...,n} из выражений, аналогичных (1), (2), а также (3), (4):

Местоположение ПС g, где g g∈{1,...,n} определяется на ПС g разностно-дальномерным способом [2, с. 10, 11] относительно неподвижных ОС 1, ОС 2, ОС 3 с известными координатами, например, по следующим разностям:
{ωt+ψ0-(ω/c)•r1g} - {ωt+ψ1-(ω/c)•r2g}, (7)
{ωt+ψ1-(ω/c)•r2g} - {ωt+ψ2-(ω/c)•r3g}, (8)
Поскольку после проведения определений (7), (8) на каждой из станций ПС 1, ПС 2, ..., ПС n известны координаты данной станции, то могут быть определены и дальности r1g, r2g, r3g, где g принимает значения от 1 до n.
Дальности rig определяются на ПС g, где g∈{1,...,n} , при известных значениях параметров (2), (4), (6), а также при известных r1g, r2g, r3g любым из следующих выражений:
{-ω/c)•r1g+(ω/c)•rig} +(ω/c)•r1g,
{-ω/c)•r2g+(ω/c)•rig} +(ω/c)•r2g,
{-ω/c)•r3g+(ω/c)•rig} +(ω/c)•r3g.
На этом цикл работы системы TЦ (см. фиг. 2) по способу дистанционного определения координат активных необслуживаемых станций заканчивается.
Структурная схема опорных станций 1, 2, 3 приведена на фиг. 3. Сигналы станций системы, пройдя через среду распространения, принимаются приемником и через блок измерения, преобразующий их в цифровую форму, поступают в вычислительный блок, управляющий работой передатчика, излучающего в пространство сигналы для станций системы, и блоком индикации, представляющим информацию о функционировании системы.
Структурная схема каждой из k активных необслуживаемых станций приведена на фиг. 4. Сигналы станций системы, пройдя через среду распространения, принимаются приемником и через блок измерения, преобразующий их в цифровую форму, поступают в вычислительный блок, управляющий работой передатчика, излучающего в пространство сигналы для станций системы.
Структурная схема каждой из n пассивных станций приведена на фиг. 5. Сигналы станций системы, пройдя через среду распространения, принимаются приемником и через блок измерения, преобразующий их в цифровую форму, поступают в вычислительный блок, накапливающий информацию для определения дальностей, определяющий местоположение и управляющий блоком индикации для представления результатов вычислений.
Варианты построения опорных станций, активных необслуживаемых станций и пассивных станций приведены, например, на с. 30 [2]. Вариант построения вычислительного блока приведен на с. 161 [3].
Технико-экономический эффект заявляемого способа состоит в меньшем энергопотреблении и скрытности работы пассивных станций, дистанционно определяющих координаты подвижных станций системы, а также в возможности определения данных координат неограниченным количеством пассивных станций в одном и том же цикле.
Измерение расстояний в предлагаемом способе контроля за перемещением объектов может осуществляться не только методом разделения излучений во времени, но и другими методами, например посредством кодового разделения сигналов.
ЛИТЕРАТУРА
1. Патент РФ N 2058562. Способ дистанционного определения координат объектов/ Кокорин В.И. Опубл. 1996, Бюл. N 11.
2. Агафонников А. М. Фазовые радиогеодезические системы для морских исследований. - М.: Наука, 1979. - 164 с.
3. Стрыгин В. В. , Щарев Л.С. Основы вычислительной микропроцессорной техники и программирования. - М.: Высш. шк., 1989. - 479 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАСПОЗНАВАНИЯ СИГНАЛОВ ИСТОЧНИКА ИМПУЛЬСНОЙ ПОМЕХИ (ВАРИАНТЫ) И КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2013 |
|
RU2538195C1 |
| СПОСОБ РАДИОНАВИГАЦИОННЫХ ИЗМЕРЕНИЙ В ИМПУЛЬСНО-ФАЗОВОЙ РАДИОНАВИГАЦИОННОЙ СИСТЕМЕ | 1997 |
|
RU2115937C1 |
| СПОСОБ ПРОВЕРКИ ФУНКЦИОНИРОВАНИЯ ИНТЕГРИРОВАННОГО ЗАПРОСЧИКА-ОТВЕТЧИКА | 2014 |
|
RU2561510C1 |
| Способ определения дальности при автовождении машинно-тракторного агрегата | 1991 |
|
SU1793833A3 |
| СПОСОБ СИНХРОНИЗАЦИИ ШКАЛ ВРЕМЕНИ | 1997 |
|
RU2146833C1 |
| УСТРОЙСТВО ИСКАЖЕНИЯ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ОБЪЕКТА | 2011 |
|
RU2486538C2 |
| СПОСОБ ЗАЩИТЫ РАДИОЛОКАЦИОННОЙ СТАНЦИИ ОТ ПРОТИВОРАДИОЛОКАЦИОННОЙ РАКЕТЫ НА ОСНОВЕ ИСПОЛЬЗОВАНИЯ ПЕРЕИЗЛУЧАЮЩЕГО ЭКРАНА | 2001 |
|
RU2210089C2 |
| СПОСОБ БЛОКИРОВКИ СОТОВОЙ СВЯЗИ | 2021 |
|
RU2760030C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ ЦЕЛЕЙ И КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2524923C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ КАЖДОГО ИЗ M АКТИВНЫХ ОБЪЕКТОВ | 1986 |
|
SU1421101A1 |




Использование: для определения местоположения объекта. Технический результат: расширение функциональных возможностей за счет дистанционного определения пассивными станциями местоположения активных необслуживаемых станций. Способ дистанционного определения координат активных необслуживаемых станций заключается в излучении сигналов опорной станцией 1, приеме излученных сигналов на опорной станции 2, запоминании фазы на опорной станции 2, приеме на активных необслуживаемых станциях сигнала опорной станции 1, приеме на опорной станции 1 сигналов, излученных k активными необслуживаемыми станциями, приеме на каждой их n пассивных станций сигнала опорной станции 1, сигналов k активных необслуживаемых станций, а также сигналов от k активных необслуживаемых станций, переизлученных опорной станцией 1, определении на g-й пассивной станции дальностей от опорной станции 1 до k активных необслуживаемых станций, переизлучении на опорной станции 2 сигнала опорной станции 1, приеме на опорной станции 3 сигнала, излученного опорной станцией 2, приеме на k активных необслуживаемых станциях сигнала опорной станции 2, приеме на опорной станции 2 сигналов, излученных k активными необслуживаемыми станциями, приеме на каждой из n пассивных станций сигнала опорной станции 2, сигналов, излученных k активными необслуживаемыми станциями, а также сигналов от k активных необслуживаемых станций, переизлученных опорной станицей 2, определении на g-й пассивной станции дальностей от опорной станции 2 до k активных необслуживаемых станций, переизлучении на опорной станции 1 сигнала опорной станции 2, приеме на k активных необслуживаемых станциях сигнала опорной станции 3, приеме на опорной станции 3 сигналов, излученных k активными необслуживаемыми станциями, приеме на каждой из n пассивных станций сигнала опорной станцией 3, сигналов k активных необслуживаемых станций, а также сигналов k активных необслуживаемых станций, переизлученных опорной станцией 3, определении на g-й пассивной станции дальностей от опорной станции 3 до k активных необслуживаемых станций, дальности от g-й пассивной станции до опорной станции l, дальности от g-й пассивной станции до опорной станции 2, дальности от g-й пассивной станции до опорной станции 3, дальностей от g-й пассивной станции до каждой из k активных необслуживаемых станций. 6 ил.
Способ дистанционного определения координат активных необслуживаемых станций заключается в излучении сигналов опорной станцией 1, приеме излученных сигналов на опорной станции 2, отличающийся тем, что на опорной станции 2 запоминают фазу, на каждой из k активных необслуживаемых станций принимают излученный опорной станцией 1 сигнал, запоминают фазу, задерживают и переизлучают сигнал, принимают на опорной станции 1 сигналы, излученные каждой из k активных необслуживаемых станций, запоминают фазы принятых сигналов, задерживают и переизлучают сигналы с разделением по времени, принимают на каждой из n пассивных станций сигнал, излученный опорной станцией 1, сигналы излученные каждой из k активных необслуживаемых станций, а также сигналы от каждой из k активных необслуживаемых станций, переизлученные опорной станцией 1, определяют на g-й пассивной станции дальности от опорной станции 1 до каждой из k активных необслуживаемых станций, переизлучают на опорной станции 2 сигнал, принятый от опорной станции 1, принимают на опорной станции 3 сигнал, излученный опорной станцией 2, запоминают фазу, на каждой из k активных необслуживаемых станций принимают излученный опорной станцией 2 сигнал, запоминают фазу, задерживают и переизлучают сигнал, принимают на опорной станции 2 сигналы, излученные каждой из k активных необслуживаемых станций, запоминают фазы принятых сигналов, задерживают и переизлучают сигналы с разделением по времени, принимают на каждой из n пассивных станций сигнал, излученный опорной станцией 2, сигналы излученные каждой из k активных необслуживаемых станций, а также сигналы от каждой из k активных необслуживаемых станций, переизлученные опорной станцией 2, определяют на g-й пассивной станции дальности от опорной станции 2 до каждой из k активных необслуживаемых станций, переизлучают на опорной станции 3 сигнал, принятый от опорной станции 2, на каждой из k активных необслуживаемых станций принимают излученный опорной станцией 3 сигнал, запоминают фазу, задерживают и переизлучают сигнал, принимают на опорной станции 3 сигналы, излученные каждой из k активных необслуживаемых станций, запоминают фазы принятых сигналов, задерживают и переизлучают сигналы с разделением по времени, принимают на каждой из n пассивных станций сигнал, излученный опорной станцией 3, сигналы, излученные каждой из k активных необслуживаемых станций, а также сигналы от каждой из k активных необслуживаемых станций, переизлученные опорной станцией 3, определяют на g-й пассивной станции дальности от опорной станции 3 до каждой из k активных необслуживаемых станций, дальность от g-й пассивной станции до опорной станции 1, дальность от g-й пассивной станции до опорной станции 2, дальность от g-й пассивной станции до опорной станции 3, дальности от g-й пассивной станции до каждой из k активных необслуживаемых станций.
| АГАФОННИКОВ А.М | |||
| Фазовые радиогеодезические системы для морских исследований | |||
| - М., 1979, с | |||
| Солесос | 1922 |
|
SU29A1 |
| RU 2058562 С1, 20.04.1996 RU 94001458 A1, 10.10.1995 DE 2525446 A, 16.12.1976 GB 1248066 A, 29.09.1971 US 4438439 A, 20.03.1984 | |||

