Изобретение относится к радиотехнике и может быть использовано в радиогеодезических и радионавигационных системах.
Цель изобретения повышение точности.
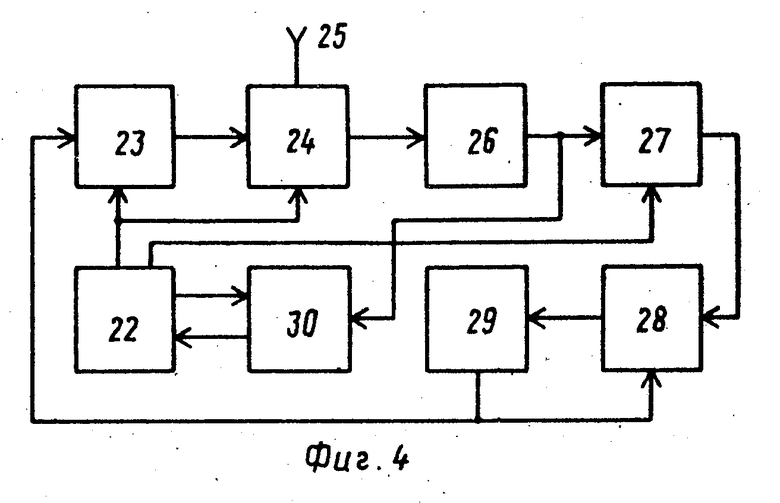
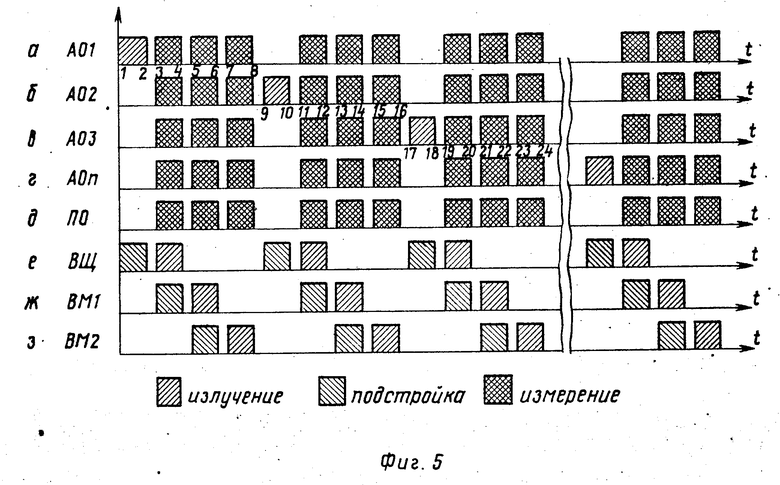
На фиг. 1 представлена структурная электрическая схема системы определения координат каждого из m активных объектов; на фиг. 2 схема ведущего маяка; на фиг. 3 схема ведомого маяка; на фиг. 4 схема активного объекта; на фиг. 5а-з временные диаграммы.
Схема системы определения координат каждого из m активных объектов (фиг. 1) содержит ведущий маяк 1, первый ведомый маяк 2, второй ведомый маяк 3, m активных объектов 4, а ведущий маяк (фиг.2) содержит генератор 5 формата, передатчик 6, антенный переключатель 7, антенну 8, приемник 9, ключ 10, блок 11 автоподстройки фазы и опорный генератор 12. Первый (второй) ведомый маяк 2 (фиг.3) содержит генератор 13 формата, передатчик 14, антенный переключатель 15, антенну 16, приемник 17, ключ 18, блок 19 автоподстройки фазы, опорный генератор 20 и блок 21 синхронизации, а активный объект 4 (фиг.4) содержит генератор 22 формата, передатчик 23, антенный переключатель 24, антенну 25, приемник 26, ключ 27, блок 28 измерения задержек, опорный генератор 29 и блок 30 синхронизации.
На фиг. 5 приняты следующие обозначения: АО1 первый активный объект, АО2 второй активный объект, АО3 третий активный объект, АОn-n активный объект, ПО пассивный объект, ВЩ ведущий маяк, ВМ1 первый ведомый маяк, ВМ2 второй ведомый маяк.
Способ определения координат каждого из m активных объектов состоит в следующем.
На первом активном объекте 4, координаты которого необходимо определить, излучают сигнал в интервал времени t1-t2 (см.фиг. 5а). Если необходимо одновременно определить координаты на втором активном объекте 4, то ему для излучения выделяют интервал времени t9-t10 (см.фиг.5б), аналогично для излучения третьего активного объекта отводится интервал времени t17-t18 (фиг. 5в). Во время указанных интервалов запоминают фазу принятого сигнала и в интервал времени t3-t4, t11-t12 и t19-t20 (фиг.5а-г) производят его переизлучение. Переизлученный сигнал принимается на первом и втором ведомых маяках (фиг.5ж,з).
После этого в интервалах времени t5-t6, t7-t8, t13-t14, t15-t16, t21-t22, t23-t24 излучают сигналы первого и второго ведомых маяков 2 и 3. Сигналы ведущего 1 и первого и второго ведомых маяков 2 и 3 (фиг.5е,ж,з) принимают на активных объектах 4 и по формуле
где τАО-ВЩ+τВЩ-АО задержка сигнала, прошедшего путь от активного объекта 4 до ведущего маяка 1 и обратно; разность задержек при прохождении сигналов от ведущего маяка 1 до активного объекта 4 двумя путями: через первый (второй) ведомый маяк 2 (3) и, например, для случая, когда сигнал (первого) ведомого маяка 2 подстраивался по сигналу данного активного объекта 4, на котором производится местоопределение;
разность задержек при прохождении сигналов от ведущего маяка 1 до активного объекта 4 двумя путями: через первый (второй) ведомый маяк 2 (3) и, например, для случая, когда сигнал (первого) ведомого маяка 2 подстраивался по сигналу данного активного объекта 4, на котором производится местоопределение; среднее значение разностей аналогичных задержек, но для случаев, когда сигнал ведущего маяка 1 подстраивался по сигналам остальных (n-1) активных объектов, где n ≥ 1, определяют дальность активного объекта 4 до первого (второго) ведомых маяков 2 и 3.
среднее значение разностей аналогичных задержек, но для случаев, когда сигнал ведущего маяка 1 подстраивался по сигналам остальных (n-1) активных объектов, где n ≥ 1, определяют дальность активного объекта 4 до первого (второго) ведомых маяков 2 и 3.
В случае, когда число активных объектов велико (более четырех), выигрыш по точности может быть еще больше, если расстояние до ведомого маяка определять по другой формуле
Система определения координат активного объекта (фиг.1) работает следующим образом. В соответствии с временным форматом системы производится излучение сигнала каждого из m активных объектов 4. Сигнал активного объекта принимается антенной 8 ведущего маяка 1, через антенный переключатель 7 поступает в приемник 9, где усиливается, его фаза запоминается блоком 11 автоподстройки фазы и опорным генератором 12 и в соответствии с временными диаграммами (фиг.5а-з), формируемыми в генераторе 5 формата, усиливается в передатчике 6 и излучается. Сигнал, излученный ведущим маяком, принимается на первом (втором) ведомом маяке 2 (3).
С выхода антенны 16 первого ведомого маяка 2 через антенный переключатель 15 сигнал поступает на вход приемника 17 и в моменты времени, определяемые генератором 13 формата, поступает на блок 19 автоподстройки фазы и опорный генератор 20, где запоминается фаза колебания. Блок 21 синхронизации служит для коррекции генератора 13 формата. В соответствующие моменты времени, определяемые генератором 13 формата, сигнал измеряется передатчиком 14.
Сигналы ведущего и первого и второго ведомых маяков 1, 2 и 3 принимаются антенной 25 активного объекта 4, через антенный переключатель 24 поступают на вход приемника 26, где усиливаются, и через ключ 27, управляемый генератором 22 формата, поступают на вход блока 28 измерения задержек. В блоке 18 измерения задержек происходит измерение запаздываний сигналов, первым и вторым ведомыми маяками 2 и 3 относительно сигнала ведущего маяка 1 и в соответствии с формулой (1) определяются расстояния активного объекта 4 до первого и второго ведомых маяков 2 и 3.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТОВ | 1983 |
|
SU1212177A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСПОЛНИТЕЛЬНОГО МЕХАНИЗМА ПОДВИЖНОГО ОБЪЕКТА | 1994 |
|
RU2082096C1 |
| СПОСОБ ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ КООРДИНАТ АКТИВНЫХ НЕОБСЛУЖИВАЕМЫХ СТАНЦИЙ | 1999 |
|
RU2172963C2 |
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ ДАЛЬНОМЕРНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПОЗИЦИОНИРОВАНИЯ ПОДВОДНЫХ ОБЪЕКТОВ В НАВИГАЦИОННОМ ПОЛЕ ПРОИЗВОЛЬНО РАССТАВЛЕННЫХ ГИДРОАКУСТИЧЕСКИХ МАЯКОВ-ОТВЕТЧИКОВ | 2011 |
|
RU2483326C2 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2011 |
|
RU2463624C1 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА | 2008 |
|
RU2365939C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ И КОНТРОЛЯ МЕСТОПОЛОЖЕНИЯ ПОДВОДНОГО ОБЪЕКТА | 2014 |
|
RU2561012C1 |
| СПОСОБ РАДИОНАВИГАЦИИ И РЕГИОНАЛЬНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2164694C2 |
| СПОСОБ РАДИОНАВИГАЦИОННЫХ ИЗМЕРЕНИЙ В ИМПУЛЬСНО-ФАЗОВОЙ РАДИОНАВИГАЦИОННОЙ СИСТЕМЕ | 1997 |
|
RU2115937C1 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2011 |
|
RU2456634C1 |

Изобретение относится к радиотехнике и повышает точность. Способ заключается в последовательном во времени излучении сигнала каждым из m активных объектов (АО), приеме излученных каждым из m АО сигналов на ведущем маяке, запоминании фазы, задержке и переизлучении сигналов, принятых от каждого из m АО, а также в приеме переизлученных от каждого из m АО сигналов на 1- и 2-м ведомом маяках, в запоминании их фазы, задержке, их переизлучении, приеме на k-м АО сигналов k-го АО, переизлученных ведущим и 1- и 2-м ведомыми маяками, определении дальности k-го объекта до 1- и 2-го ведомых маяков. Для повышения точности на k-м АО принимают сигналы, переизлученные ведущим и 1- и 2-м ведомыми маяками от каждого из m АО. Дальность до 1- и 2-го ведомых маяков определяют по ф-ле  - задержка сигнала, прошедшего путь от АО до ведущего маяка и обратно,
- задержка сигнала, прошедшего путь от АО до ведущего маяка и обратно,  - разность задержек при прохождении сигналов от ведущего маяка до АО через ведомый маяк и напрямую,
- разность задержек при прохождении сигналов от ведущего маяка до АО через ведомый маяк и напрямую,  - среднее значение разностей задержек сигнала от ведущего маяка до АО при приеме сигналов i-го объекта. 5 ил.
- среднее значение разностей задержек сигнала от ведущего маяка до АО при приеме сигналов i-го объекта. 5 ил.
Способ определения координат каждого из m активных объектов, заключающийся в последовательном во времени излучении сигнала каждым из m активных объектов, приеме излученных каждым из m активных объектов сигналов на ведущем маяке, запоминании фазы, задержке и переизлучении сигналов, принятых от каждого из m активных объектов, приеме переизлученных от каждого из m активных объектов сигналов на первом и втором ведомом маяках, запоминании их фазы, задержке и их переизлучении, приеме на k-м активном объекте сигналов k-го активного объекта, переизлученных ведущим и первым и вторым ведомыми маяками и определение дальности k-го объекта до первого и второго ведомых маяков, отличающийся тем, что, с целью повышения точности, на k-м активном объекте принимают сигналы, переизлученные ведущим и первым и вторым ведомыми маяками от каждого из m активных объектов, а дальность до первого и второго ведомых маяков определяют по формуле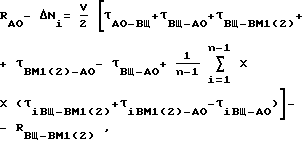
где (τAO-ВЩ+τВЩ-AО) задержка сигнала, прошедшего путь от активного объекта до ведущего маяка и обратно;
τВЩ-ВМ1(2)+τВМ1(2)-AO-τВЩ-AO
разность задержек при прохождении сигналов от ведущего маяка до активного объекта через ведомый маяк и напрямую; среднее значение разностей задержек сигналов от ведущего маяка до активного объекта при приеме сигналов i-го (i 1.n, i ≠ k) объекта.
среднее значение разностей задержек сигналов от ведущего маяка до активного объекта при приеме сигналов i-го (i 1.n, i ≠ k) объекта.
| Сайбель А.Г | |||
| Основы теории точности радиотехнических методов местоопределения | |||
| М.: Советское радио, 1958 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТОВ | 1983 |
|
SU1212177A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
