Заявляемые технические решения относятся к области радиолокации и могут быть использованы в радиолокационных станциях (РЛС) для защиты от импульсных, в том числе ответных, помех.
Большие проблемы работе РЛС создают импульсные помехи и прежде всего ответные помехи (Защита от радиопомех. Под ред. М.В. Максимова. - М.: Сов. Радио, 1976 г., с.60). В результате их действия происходят ложные обнаружения целей, так как принятые сигналы ответных помех не отличаются по структуре от сигналов, отраженных от реальных целей. Особенно эффективна помеха, когда постановщик помехи переизлучает усиленную копию зондирующего сигнала и уровень помехи не зависит от уровня зондирующего сигнала. При достаточно большой мощности ответной помехи, она обнаруживается не только в главном луче, но и по боковым лепесткам диаграммы направленности антенны (ДНА), в результате чего создается большое число ложных сигналов (отметок) хаотических или неподвижных, в простейшем случае, либо движущихся с установленной постановщиком помехи скоростью в случае синхронной ответной помехи. Во всех случаях импульсы помехи воспринимаются как отраженные от целей, поэтому по ним выполняют захват и завязку трассы (С.З. Кузьмин. Основы проектирования систем цифровой обработки радиолокационной информации. Стр.109) с последующим ее сбросом в случае несинхронной помехи или ведением ложной трассы в случае синхронной помехи с изменяющейся задержкой. В результате ответная помеха приводит к перегрузке устройств обработки сигнала и сопровождения трасс целей.
Особенно сложной является задача выделения целей, маскируемых ложными сигналами, при действии ответной помехи в главном луче ДНА.
Известны способы подавления помех в главном луче ДНА однопозиционной РЛС, заключающиеся в применении АРУ, ограничения или компенсации (Теоретические основы радиолокации. Под редакцией Я.Д. Ширмана. - М.: Сов. Радио, 1978, стр.298-302, 346-347).
Недостаток известных способов подавления помех состоит в том, что в случае действия ответной помехи с высоким уровнем мощности они не обеспечивают подавления помехи, поскольку она по своей структуре не отличается от сигналов реальных целей, а по уровню может значительно превосходить уровень этих сигналов.
Таким образом, известные способы не позволяют подавить ответную помеху. Но исключить перегрузку устройств обработки и сопровождения трасс целей можно и без подавления помехи, если распознать ее импульсы.
Известен наиболее близкий по используемым в предлагаемом способе признакам способ радиолокационного определения координат источника радиоизлучения и радиолокационная станция для его реализации (патент RU 2217773 C2), основанный на приеме прямого излучения источника и его радиоизлучения, отраженного от объекта, измерении по положению максимума взаимной корреляционной функции радиоизлучений величины временного сдвига Δt этих радиоизлучений, измерении угла места и азимута источника излучений, а также дальности до объекта, отражающего радиоизлучение и осуществляют вычисление дальности до источника излучений.
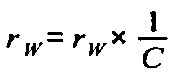
Известен наиболее близкий к предлагаемым комплекс - радиолокационная станция (РЛС) (патент RU 2217773 C2) (фиг.1). РЛС 1 содержит активный 3 и пассивный 4 каналы обнаружения, пассивный канал 4 включает последовательно соединенные антенну 6 и приемник 12, а также блок вычисления координат 16, содержащий последовательно соединенные устройство измерения сдвига принимаемых сигналов во времени 13 и устройство вычисления координат 14, координатный выход антенны 6 соединен со вторым входом устройства вычисления координат 14, а выход приемника 12 соединен с первым входом устройства измерения сдвига сигналов во времени 13, активный канал обнаружения 3 содержит последовательно соединенные антенну 5, антенный переключатель 7, приемник 9 и устройство вычисления дальности 11, второй вход антенного переключателя 7 соединен с выходом передатчика 8, выход устройства вычисления дальности 11 соединен с пятым входом устройства вычисления координат 14, а координатный выход антенны 5 соединен с четвертым входом устройства вычисления координат 14, выходы синхронизатора 10 соединены с соответствующими синхровходами передатчика 8, устройства вычисления дальности 11 и устройства вычисления координат 14.
Комплекс работает следующим образом.
На первом этапе с помощью пассивного канала 4 РЛС 1 обнаруживают и определяют угловые координаты источника радиоизлучений 15. На втором этапе каналом 3 РЛС 1 в пассивном режиме обнаруживают и принимают отражения от объекта 2, определяют его угловые координаты и вычисляют относительную задержку сигналов в каналах по максимуму корреляционной функции. На третьем этапе каналом 3 РЛС 1 в активном режиме определяют дальность до объекта 2 и в устройстве вычисления координат 14 определяют дальность и угловые координаты источника радиоизлучений 15.
Недостаток известных способа и устройства состоит в том, что они не позволяют распознать импульсы помехи, в том числе импульсы ответной помехи в потоке принимаемых сигналов.
Таким образом, поставленной задачей (техническим результатом) является распознавание импульсов помехи, в том числе импульсов ответной помехи в потоке принимаемых сигналов от источников радиоизлучений.
Поставленная задача (технический результат) по первому варианту решается тем, что в способе, основанном на приеме прямого излучения источника и его отражения от объекта, которое коррелировано с прямым излучением, измерении по положению максимума взаимной корреляционной функции величины временного сдвига этих радиоизлучений, согласно изобретению в качестве отражающего объекта используют активный или пассивный ретранслятор, принимают импульсные последовательности - переизлученную ретранслятором последовательность и принятую с осматриваемого направления, устраняют временной сдвиг последовательностей, при необходимости определяют значение корреляции импульсов последовательностей, импульсы, принятые с осматриваемого направления, соответствующие установленному критерию определения помехи, считают импульсами постановщика импульсной помехи.
Поставленная задача (технический результат) по первому варианту решается также тем, что в качестве критерия импульсов постановщика импульсной помехи используют совпадения во времени импульсов последовательностей.
Поставленная задача (технический результат) по первому варианту решается также тем, что в качестве критерия импульсов постановщика импульсной помехи используют уровень корреляции импульсов последовательностей, превышающих средний уровень.
Поставленная задача (технический результат) по первому варианту решается также тем, что в качестве критерия импульсов постановщика импульсной помехи используют превышение корреляционной функцией уровня порога, который определяют по допустимой вероятности регистрации ложной помехи как реальной.
Поставленная задача (технический результат) по первому варианту решается также тем, что в качестве критерия импульсов постановщика импульсной помехи используют пороговый уровень, который автоматически изменяют от максимального значения до значения, при котором загрузка устройств обработки и сопровождения не превышает допустимый.
Поставленная задача (технический результат) по второму варианту решается тем, что в способе, основанном на приеме прямого излучения источника с известными координатами и его отражения от объекта с известными координатами, измерении величины временного сдвига между этими излучениями, согласно изобретению в качестве отражающего объекта используют активный или пассивный ретранслятор, принимают импульсные последовательности - излученную постановщиком ответной помехи (ПОП) и переизлученную ретранслятором, по последней вычисляют моменты излучения импульсов ПОП и распознают их в первой последовательности.
Поставленная задача (технический результат) достигается тем, что комплекс для реализации способа по первому варианту включает РЛС, содержащую активный и пассивный каналы обнаружения, пассивный канал включает последовательно соединенные антенну и приемник, а также блок вычисления координат, активный канал включает последовательно соединенные антенну, антенный переключатель, приемник, передатчик и синхронизатор, выход передатчика соединен со вторым входом антенного переключателя, выход синхронизатора соединен с синхровходами передатчика и приемника, согласно изобретению введены блок распознавания ответной помехи и цели (РПиЦ) и пассивный или активный ретранслятор, а в блок вычисления координат введены блок вычисления коэффициентов корреляции (ВКК), пороговое устройство (ПУ) и управляемая линия задержки коррелятора (ЛЗК), выход приемника пассивного канала соединен с первым входом ВКК, второй выход ВКК соединен с входом ПУ, выход приемника активного канала соединен с первым входом ЛЗК, первый выход ЛЗК соединен со вторым входом ВКК, второй выход ЛЗК соединен с первым входом блока РПиЦ, а выход ПУ соединен со вторым входом РПиЦ, первый выход ВКК соединен со вторым входом ЛЗК, ретранслятор располагается в зоне прямой видимости РЛС.
Поставленная задача (технический результат) достигается тем, что комплекс для реализации способа по второму варианту, представляющий собой РЛС, которая содержит активный и пассивный каналы обнаружения, пассивный канал включает последовательно соединенные антенну и приемник, а также блок вычисления координат, содержащий последовательно соединенные устройство вычисления сдвига принимаемых сигналов во времени (ВСВ) и устройство вычисления координат (ВК) постановщика ответной помехи (ПОП), выход приемника соединен с входом блока вычисления координат, активный канал обнаружения включает последовательно соединенные антенну, антенный переключатель и приемник, а также передатчик, выход которого подключен ко второму входу антенного переключателя, согласно изобретению, в активный канал РЛС введены блок вычисления момента излучения импульсов (ВМИЗ), блок РПиЦ и блок датчика единого времени (ДЕВ), а также пассивный или активный ретранслятор, первый вход ВМИЗ соединен с выходом приемника активного канала, второй вход ВМИЗ соединен со вторым выходом ВСВ, выход ВМИЗ соединен с входом РПиЦ, выходы ДЕВ соединены с синхровходами соответственно передатчика, приемника, блоков ВМИЗ, РПиЦ, устройств ВК и ВСВ, ретранслятор располагается в зоне прямой видимости РЛС.
Суть работы способа по первому варианту состоит в том, что однопозиционная РЛС, содержащая активный и пассивный каналы, излучает импульс, ПОП в ответ на принятый импульс РЛС излучает ответную помеху в виде последовательности импульсов, идентичных по структуре импульсу РЛС. При этом активный канал РЛС, находящийся в режиме приема, принимает отраженные от цели импульсы и прямую последовательность ответных помех. Ретранслятор переизлучает ответную помеху, которая принимается пассивным каналом.
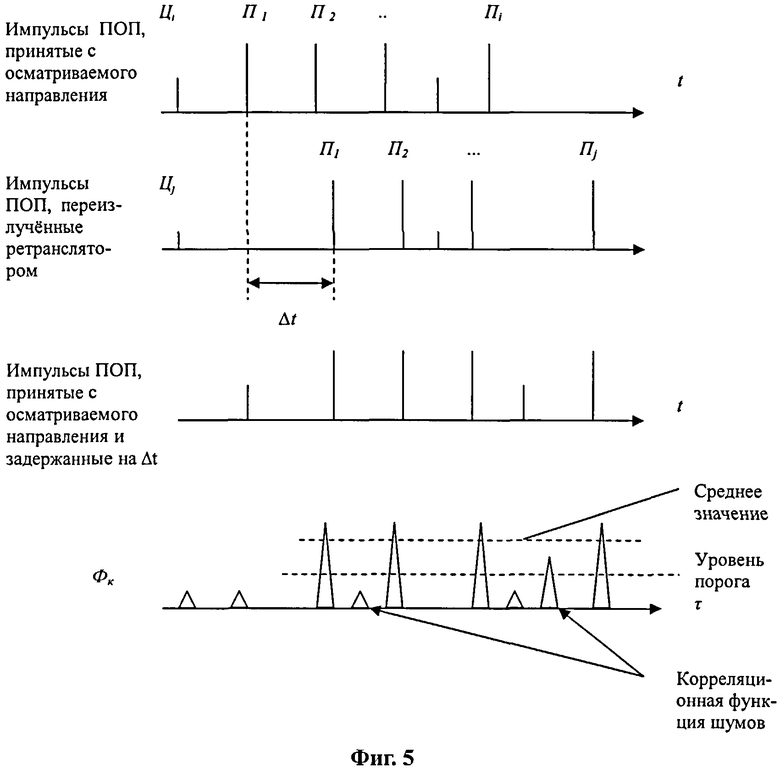
Если вычисление корреляционных функций по каждому импульсу последовательностей производить после исключения сдвига во времени прямой последовательности на величину разности хода Δt импульсов от ПОП и через ретранслятор, то коррелироваными остаются только импульсы помехи, так как время разности хода для импульсов помехи и цели будет различно (фиг.5). Величина сдвига во времени, как и в прототипе, определяется по максимуму суммарной функции корреляции.

При Δt интеграл 


Пi и Цi - импульсы ответной помехи и цели в последовательности с осматриваемого направления, где i=1…n, n - число импульсов помехи и целей.
Пj и Цj - импульсы помехи и цели, в последовательности переотраженные ретранслятором, где j=1…k - число переотраженных импульсов ретранслятором. Импульсы, принятые с осматриваемого направления, соответствующие установленному критерию определения помехи, считают помехой. Критериями помехи излученной постановщиком ответной помехи считают следующие:
1) совпадения во времени импульсов последовательностей;
2) превышение среднего уровня корреляции импульсов последовательностей;
3) превышение уровня порога, который определяют по допустимой вероятности регистрации ложной помехи как реальной.
При этом уровень порога устанавливают следующим образом.
При отсутствии ответных помех производят вычисление взаимной корреляции между шумами активного и пассивного каналов с постоянной интегрирования, равной длительности импульса РЛС. Так как время интегрирования ограничено, то вычисленная функция корреляции не будет равна нулю, а будет флюктуировать с дисперсией σ. Уровень порога выбирают таким, чтобы превышение его функцией корреляции шумов происходило не более чем m раз за выбранное время T (см. фиг.5). При этом вероятность пропуска (нераспознавания) помехи определяется соотношением дисперсии и уровня максимума функции корреляции помехи. Пропуски корреляции импульсов помехи означают завязывание ложных трасс;
4) превышение порогового уровня, который автоматически изменяют от максимального значения до значения, при котором загрузка устройств обработки и сопровождения не превышает допустимый.
Таким образом, получают возможность распознавать сигналы, излученные постановщиком импульсных и, в том числе ответных, помех, чем и достигается решение поставленной задачи и технический результат.
Суть работы способа по второму варианту состоит в том, что принимают прямое излучение источника с известными координатами и переизлученное активным или пассивным ретранслятором, координаты которого известны, измерении величины временного сдвига между этими излучениями, по последнему определяют момент излучения импульсов источника и распознают их в прямом излучении. Задача решается следующим образом:
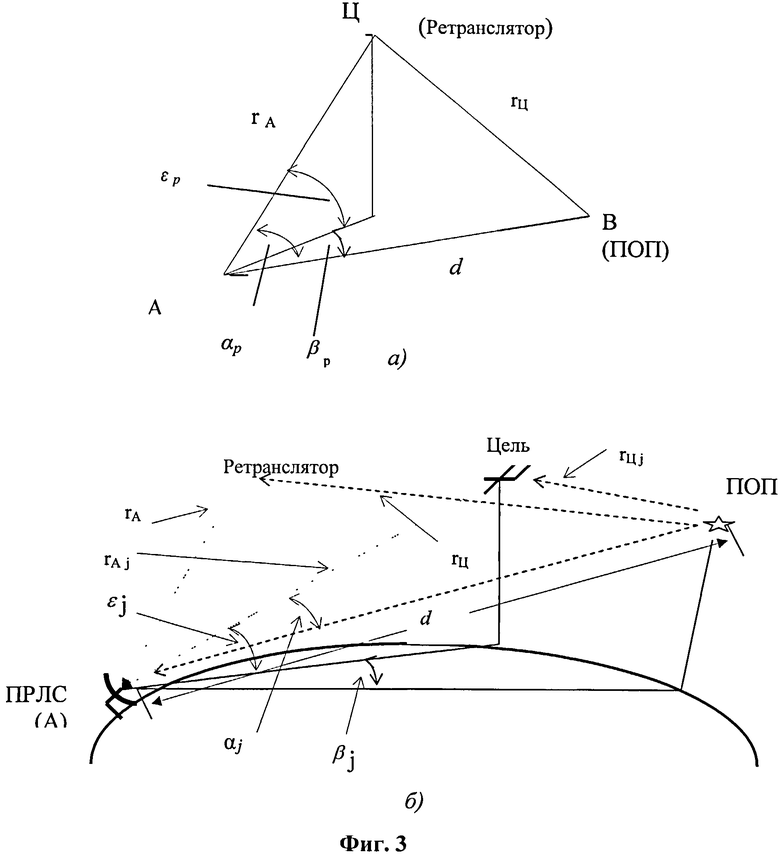
1) дальность от РЛС до излучателя (ПОП) известна и равна d;
2) определяют дальность rЦ от ПОП до ретранслятора из треугольника АЦВ (фиг.3) по формуле

где C - скорость света; 
αР=arcosCosβР×CosεР,
где βР и εР - азимут и угол места ретранслятора относительно направления на ПОП;
rА - известное расстояние от РЛС до ретранслятора;
3) по известному в едином времени моменту приема tпр отраженного импульса от ретранслятора, известному расстоянию от РЛС до ретранслятора rА и вычисленному значению rЦ определяют момент излучения импульсов помехи tИ по формуле

где (τА+τЦ) - суммарное время распространения импульса от ПОП до ретранслятора и от него до РЛС;
 ;
; 
По известному расстоянию d и моменту излучения импульса ПОП tИ распознают импульсную, в том числе и ответную, помеху.
Таким образом, решается поставленная задача и достигается технический результат в способе по второму варианту.
Изобретение иллюстрируется чертежами:
фиг.1 - комплекс, реализующий способ-прототип;
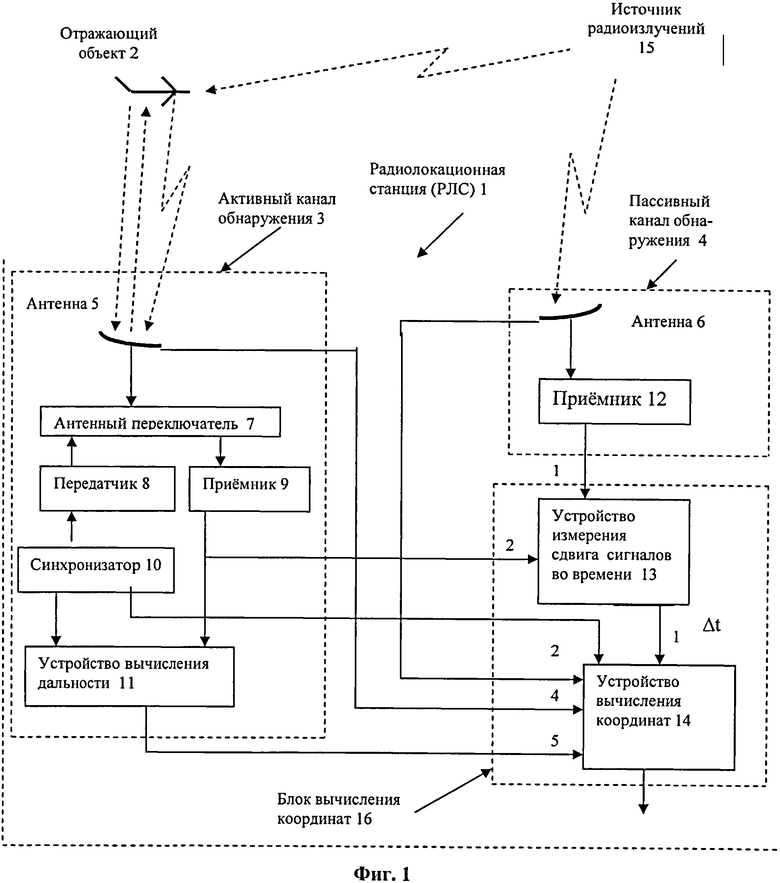
фиг.2 - заявленный комплекс, реализующий заявленный способ по первому варианту;
фиг.3 - диаграммы, поясняющие работу изобретений;
фиг.4 - заявленный комплекс, реализующий предлагаемый способ по второму варианту;
фиг.5 - диаграммы, поясняющие работу способа по первому варианту.
Заявленный комплекс, реализующий заявленный способ распознавания сигналов источника импульсных радиоизлучений по первому варианту (фиг.2), содержит РЛС 1, которая включает активный 3 и пассивный 4 каналы обнаружения, пассивный канал 4 включает последовательно соединенные антенну 6 и приемник 10, а также блок вычисления координат 16, содержащий блок вычисления коэффициентов корреляции 13, управляемую линию задержки коррелятора 12, блок распознавания ответной помехи и цели 18 и пороговое устройство 17, активный или пассивный ретранслятор, выход приемника 10 пассивного канала соединен с входом ВКК 13, активный канал 3 включает последовательно соединенные антенну 5, антенный переключатель 7, приемник 9, передатчик 8 и синхронизатор 11, выход передатчика 8 соединен со вторым входом антенного переключателя 7, выход синхронизатора 11 соединен с синхровходами передатчика 8 и приемника 9, выход приемника 9 активного канала соединен с первым входом ЛЗК 12, первый выход ЛЗК 12 соединен со вторым входом блока ВКК 13, второй выход которого соединен с входом ПУ 17, второй выход ЛЗК 13 соединен с первым входом блока РПиЦ 18, а выход ПУ 17 соединен со вторым входом РПиЦ 18, первый выход ВКК 13 соединен со вторым входом ЛЗК, ретранслятор располагается в зоне прямой видимости РЛС.
Рассмотрим более подробно реализуемость способа по первому варианту (фиг.2) на конкретном примере. РЛС 1 излучает импульсы в направлении на ПОП 15, а он излучает ответную помеху, которая переотражается от ретранслятора 2 и принимается антенной 6 пассивного канала 4, а антенна 5 активного канала 3 принимает прямое излучение ПОП 15. Импульсы, принятые активным каналом 3 и пассивным каналом 4, поступают на вход блока вычисления координат 16. В котором импульсы, принятые активным каналом 3, поступают на вход управляемой ЛЗК 12, импульсы, принятые пассивным каналом 4, поступают на первый вход блока ВКК 13, а на его второй вход поступает сигнал с первого выхода управляемой ЛЗК 12 и при некотором значении задержки Δt находится максимум корреляционной функции каждого импульса. Импульсы с выхода активного канала 3, представляющие прямое излучение ПОП 15, проходят через эту же управляемую ЛЗК 12, и если они коррелированы с импульсами в пассивном канале 4, то считаются помехой. Это позволяет распознавать импульсную, в том числе и ответную, помеху от импульсов, отраженных от цели.
Таким образом, достигается заявленный технический результат (решается поставленная задача).
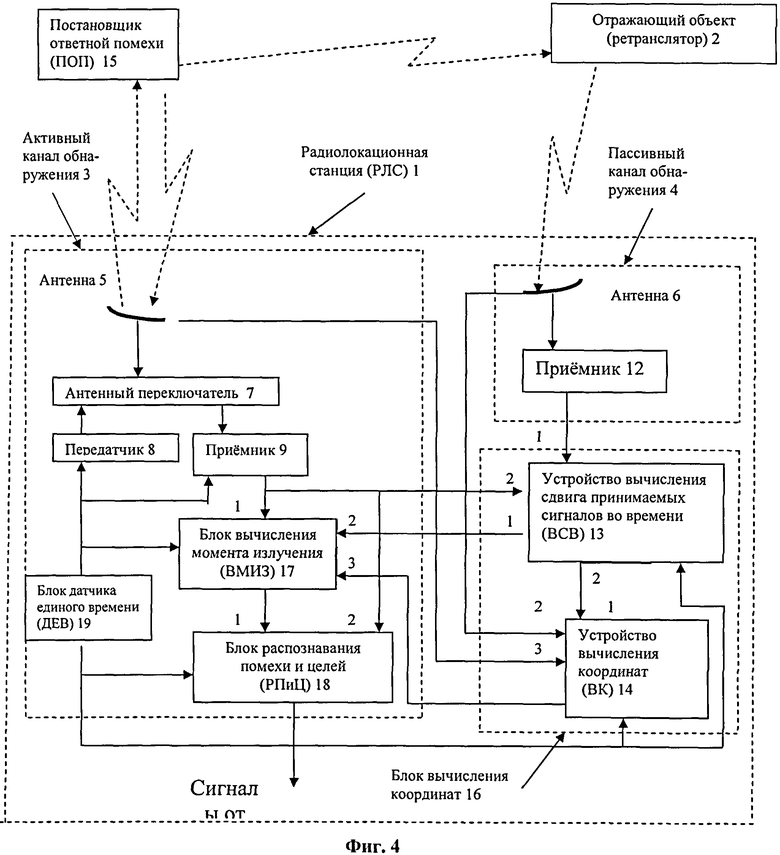
Заявленный комплекс по второму варианту, реализующий заявленный способ распознавания импульсных, в том числе и ответных, помех (фиг.4), содержит РЛС 1 и ретранслятор 2, РЛС 1 включает активный 3 и пассивный 4 каналы обнаружения, пассивный канал 4 включает последовательно соединенные антенну 6 и приемник 12, а также блок вычисления координат 16, включающий последовательно включенные устройство измерения сдвига принимаемых сигналов во времени 13 и устройство вычисления координат 14, активный канал 3, содержащий последовательно соединенные антенну 5, антенный переключатель 7, приемник 9 и передатчик 8, введены блок датчика единого времени 19, блок вычисления момента излучения 17 и блок распознавания помехи и цели 18, выход приемника 9 соединен с первым входом блока ВМИЗ 17, со вторым входом устройства ВСВ 13 и со вторым входом блока РПиЦ 18, выход блока ВМИЗ 17 соединен с первым входом блока РПиЦ 18, выход передатчика 8 соединен со вторым входом антенного переключателя 7, координатные выходы антенн 5 и 6 активного и пассивного каналов соединены со вторым и третьим входами устройства ВК 14 соответственно, первый выход устройства ВСВ 13 соединен со вторым входом ВМИЗ 17, а его второй выход соединен с первым входом устройства ВК 14, выход устройства ВК 14 соединен с третьим входом ВМИЗ 17, выход блока ДЕВ 19 соединен с синхровходами передатчика 8, приемника 9, блоков ВМИЗ 17 и РПиЦ 18, устройств ВК 14 и ВСВ 13, ретранслятор располагается в зоне прямой видимости РЛС 1.
Рассмотрим более подробно реализуемость способа и комплекса по второму варианту (фиг.4) на конкретном примере. С помощью РЛС 1 излучают импульсы в направлении на ПОП 15, а он излучает ответную помеху, которую переизлучает ретранслятор 2 и принимают антенной 6 пассивного канала 4. С помощью антенны 5 активного канала 3 принимают прямое излучение ПОП 15. Сигналы, принятые активным каналом 3, поступают на первый вход ВМИЗ 17, на второй вход устройства ВСВ 13 и на второй вход блока РПиЦ, сигналы, принятые от ретранслятора 2 пассивным каналом 4, поступают на первый вход устройства ВСВ 13 и далее на вход устройства ВК 14, с помощью блока ВМИЗ 17 определяют момент излучения ПОП 15, а в блоке РПиЦ 18 производят распознавание ответной помехи.
Таким образом, решается поставленная задача и достигается заявленный технический результат в способе и устройстве по второму варианту.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕЛЕЙ (ВАРИАНТЫ) И КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2013 |
|
RU2540982C1 |
| Способ компенсации помех и комплекс для его осуществления | 2018 |
|
RU2703999C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕЛЕЙ И КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2530808C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО ПОСТАНОВЩИКА ИМПУЛЬСНОЙ ПОМЕХИ (ВАРИАНТЫ) | 2015 |
|
RU2586077C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕЛЕЙ И КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2538105C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ-ПОСТАНОВЩИКА ОТВЕТНОЙ ПОМЕХИ И СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕЛЕЙ, ОБЛУЧАЕМЫХ ПОСТАНОВЩИКОМ ОТВЕТНОЙ ПОМЕХИ | 2012 |
|
RU2531803C2 |
| СПОСОБ ПОДАВЛЕНИЯ АКТИВНОЙ ПОМЕХИ И КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2549375C1 |
| СПОСОБ ЗАЩИТЫ РАДИОЛОКАЦИОННОЙ СТАНЦИИ ОТ ПРОТИВОРАДИОЛОКАЦИОННЫХ РАКЕТ И УСТРОЙСТВА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2170940C2 |
| СПОСОБ ПОМЕХОВОГО ПОДАВЛЕНИЯ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2015 |
|
RU2583160C1 |
| Способ пеленгации постановщика ответной помехи и радиолокационное устройство для его осуществления | 2016 |
|
RU2638317C2 |
Изобретения относятся к области радиолокации. Достигаемый технический результат - распознавание импульсов помехи, в том числе импульсов ответной помехи в потоке принимаемых сигналов от источников радиоизлучений. Указанный результат по первому варианту решается тем, что в способе, основанном на приеме прямого излучения источника и его отражения от объекта, измерении по положению максимума взаимной корреляционной функции величины временного сдвига этих радиоизлучений, в качестве отражающего объекта используют активный или пассивный ретранслятор, принимают импульсные последовательности - переизлученную ретранслятором последовательность и принятую с осматриваемого направления, устраняют временной сдвиг последовательностей, при необходимости определяют значение корреляции импульсов последовательностей, импульсы, принятые с осматриваемого направления, соответствующие установленному критерию определения помехи, считают импульсами постановщика импульсной помехи. Указанный результат по второму варианту решается тем, что в способе, основанном на приеме излучения источника с известными координатами и его отражения от объекта с известными координатами, измерении величины временного сдвига между этими излучениями, в качестве отражающего объекта используют активный или пассивный ретранслятор, принимают импульсные последовательности - излученную постановщиком ответной помехи (ПОП) с осматриваемого направления и переизлученную ретранслятором, по последней вычисляют моменты излучения импульсов ПОП и распознают их в первой последовательности. 4 н. и 4 з.п. ф-лы, 5 ил.
1. Способ распознавания сигналов источника импульсной помехи, основанный на приеме прямого излучения источника и его отражения от объекта, которое коррелировано с прямым излучением, измерении по положению максимума взаимной корреляционной функции величины временного сдвига этих радиоизлучений, отличающийся тем, что в качестве отражающего объекта используют активный или пассивный ретранслятор, принимают импульсные последовательности - переизлученную ретранслятором последовательность и принятую с осматриваемого направления, устраняют временной сдвиг последовательностей, при необходимости определяют значение корреляции импульсов последовательностей, импульсы, принятые с осматриваемого направления, соответствующие установленному критерию, считают импульсами постановщика импульсной помехи.
2. Способ по п.1, отличающийся тем, что в качестве критерия импульсов постановщика импульсной помехи используют совпадения во времени импульсов последовательностей.
3. Способ по п.1, отличающийся тем, что в качестве критерия импульсов постановщика импульсной помехи используют уровень корреляции импульсов последовательностей превышающих средний уровень.
4. Способ по п.1, отличающийся тем, что в качестве критерия импульсов постановщика импульсной помехи используют превышение корреляционной функцией уровня порога, который определяют по допустимой вероятности регистрации ложной помехи как реальной.
5. Способ по п.1, отличающийся тем, что в качестве критерия импульсов постановщика импульсной помехи используют пороговый уровень, который автоматически изменяют от максимального значения до значения, при котором загрузка устройств обработки и сопровождения не превышает допустимый.
6. Комплекс для реализации способа по п.1, содержащий радиолокационную станцию (РЛС), которая включает активный и пассивный каналы обнаружения, пассивный канал включает последовательно соединенные антенну и приемник, а также блок вычисления координат, активный канал включает последовательно соединенные антенну, антенный переключатель, приемник, передатчик и синхронизатор, выход передатчика соединен со вторым входом антенного переключателя, выход синхронизатора соединен с синхровходами передатчика и приемника, отличающийся тем, что введены блок распознавания ответной помехи и цели (РПиЦ) и пассивный или активный ретранслятор, а в блок вычисления координат введены блок вычисления коэффициентов корреляции (ВКК), пороговое устройство (ПУ) и управляемая линия задержки коррелятора (ЛЗК), выход приемника пассивного канала соединен с первым входом ВКК, второй выход ВКК соединен с входом ПУ, выход приемника активного канала соединен с первым входом ЛЗК, первый выход ЛЗК соединен со вторым входом ВКК, второй выход ЛЗК соединен с первым входом блока РПиЦ, а выход ПУ соединен со вторым входом РПиЦ, первый выход ВКК соединен со вторым входом ЛЗК, ретранслятор располагают в зоне прямой видимости РЛС.
7. Способ распознавания сигналов источника импульсной помехи, основанный на приеме прямого излучения источника с известными координатами и его отражения от объекта с известными координатами, измерении величины временного сдвига между этими излучениями, отличающийся тем, что в качестве отражающего объекта используют активный или пассивный ретранслятор, принимают импульсные последовательности - излученную постановщиком ответной помехи (ПОП) и переизлученную ретранслятором, по последней вычисляют моменты излучения импульсов ПОП и распознают их в первой последовательности.
8. Комплекс для реализации способа по п.7, содержащий радиолокационную станцию (РЛС), которая включает активный и пассивный каналы обнаружения, пассивный канал включает последовательно соединенные антенну и приемник, а также блок вычисления координат, содержащий последовательно соединенные устройство вычисления сдвига принимаемых сигналов во времени (ВСВ) и устройство вычисления координат (ВК), выход приемника соединен с входом блока вычисления координат, активный канал обнаружения включает последовательно соединенные антенну, антенный переключатель и приемник, а также передатчик, выход которого подключен ко второму входу антенного переключателя, отличающийся тем, что в активный канал РЛС введены блок вычисления момента излучения импульсов (ВМИЗ), блок распознавания помех и целей (РПиЦ), блок датчика единого времени (ДЕВ) и пассивный или активный ретранслятор, первый вход ВМИЗ соединен с выходом приемника активного канала, второй вход ВМИЗ соединен со вторым выходом ВСВ, выход ВМИЗ соединен с входом РПиЦ, выходы ДЕВ соединены с синхровходами передатчика, приемника, блоков ВМИЗ, РПиЦ, устройств ВК и ВСВ, ретранслятор располагают в зоне прямой видимости РЛС.
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2217773C2 |
| СПОСОБ ЗАЩИТЫ РАДИОЛОКАЦИОННОЙ СТАНЦИИ ОТ ИМПУЛЬСНЫХ ПОМЕХ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2494412C2 |
| МАЛОВЫСОТНАЯ ПОМЕХОЗАЩИЩЕННАЯ РЛС | 1992 |
|
RU2038606C1 |
| СПОСОБ ОБРАБОТКИ СИГНАЛОВ НА ФОНЕ СИЛЬНЫХ ИМПУЛЬСНЫХ ПОМЕХ В ПРИЕМНОМ КАНАЛЕ ИМПУЛЬСНО-ДОПЛЕРОВСКИХ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ | 2007 |
|
RU2334247C1 |
| US 7158077 B2, 02.01.2007 | |||
| WO 2008066537 A1, 05.06.2008 | |||
| RU 7463181 B2, 09.12.2008 | |||
| JP 0007333328, A, 22.12.1995 | |||

