Изобретение относится к арматуростроению, а именно к средствам комбинированного управления преимущественно запорными органами промышленных трубопроводов при помощи электродвигателя или вручную, и предназначено для управления потоками жидкости, газа и сыпучих тел.
Известен ручной дублер по авторскому свидетельству СССР №1390466, МПК4 F16K 31/05, 23.05.1988 г. Ручной дублер содержит червячный вал, вращение которому при ручном управлении передается от кулачкового вала через кулачковую муфту посредством кулачков, и шлицевое соединение. При включении электродвигателя его вращение передается на цилиндрическое колесо, разворачивающее промежуточную втулку до совпадения ее кулачков с пазами, выполненными на крышке. При этом под действием пружины промежуточная втулка смещается в осевом направлении, выводя из зацепления кулачки, обеспечивающие вращение выходного червячного вала от ручного маховика, и вводя в зацепление кулачки, обеспечивающие вращение выходного червячного вала от электродвигателя. Таким образом, переключение с ручного управления на электрическое в данном дублере происходит автоматически.
Недостаток данного ручного дублера заключается в повышенной опасности при эксплуатации, которая объясняется наличием кулачкового соединения между червячным валом и валом с маховиком для ручного управления. При переключении на ручной режим управления при работающем электродвигателе в момент сцепления кулачков на маховике имеют место сильные динамические нагрузки, которые воспринимаются руками оператора как ударная нагрузка, которая может привести к травме рук оператора. К недостаткам данного привода следует отнести также наличие в нем червячной передачи, имеющей низкое к.п.д.
Известен электромоторный привод с ручным дублером по патенту РФ №2103582, МПК6 F16K 31/05, 27.01.1998 г., который выбран в качестве прототипа к заявляемому приводу запорного органа.
В корпусе данного электромоторного привода с ручным дублером размещены червячное колесо, кинематически связанное с приводным валом запорного органа, червяк, выполненный за одно целое с червячным валом, и кулачковая муфта. Муфта поочередно взаимодействует либо с кулачками зубчатого колеса, кинематически связанного с валом электродвигателя, либо с кулачками маховика ручного дублера. Механизм принудительного перемещения муфты выполнен в виде кулачкового механизма, кулачок которого установлен в корпусе ручного дублера и соединен кинематически с кулачковой муфтой посредством пальца. Рабочий профиль поверхности кулачка периодически взаимодействует с выступом, расположенным в кольцевом пазу на торцевой поверхности кулачкового зубчатого колеса, при его повороте. Кулачковая муфта поджата к кулачкам зубчатого колеса пружиной, надетой на конец червячного вала.
Недостаток данного привода заключается в недостаточной безопасности его управления оператором в момент включения электродвигателя при переходе с ручного режима управления приводом на электрическое. Это обусловлено тем, что в начальный момент переключения вращение от вала электродвигателя передается через кулачковое зубчатое колесо выходному валу еще тогда, когда кулачки муфты находятся в зацеплении с кулачками маховика ручного дублера. Для расцепления данных кулачков кулачковое колесо вместе с выходным валом должно повернуться максимально на 180°. Учитывая то, что вал электродвигателя выходит на рабочий режим (набирает максимальные обороты) уже при повороте его вала на 15°, при столь длительном процессе расцепления кулачков муфты и маховика ручного дублера происходит удар от вращающегося электродвигателя на маховик ручного дублера, который начинает вращаться в руках оператора с возможностью его травмирования. К недостаткам данного привода следует отнести и то, что муфта подпружинена в осевом направлении. Это приводит к ударным нагрузкам на кулачки в момент их сцепления при переключении с ручного управления на электрическое.
Одним из существенных недостатков данного привода является также то, что он содержит червячную передачу, которая характеризуется малым к.п.д. Кроме того, наличие червячной передачи приводит к дороговизне ее изготовления как за счет использования дорогостоящих материалов, а именно использование такого цветного металла, как бронза, так и за счет сложной технологии ее изготовления, сборки и настройки всего привода.
Следует отметить и такой недостаток привода, который устраняется заявленным изобретением, как низкая надежность переключения режима с электрического на ручной. Это обусловлено тем, что кулачок воздействует на кулачковую муфту посредством пальца с роликом лишь с одной стороны муфты. Поэтому при перемещении кулачковой муфты по валу возможно ее заклинивание за счет перекоса.
Настоящее изобретение решает задачу повышения безопасности управления приводом запорного органа с комбинированным управлением от электродвигателя и вручную за счет устранения ударных нагрузок в маховике ручного дублера, повышающих опасность для оператора в процессе переключения работы привода с ручного на электрическое. Кроме того, изобретение решает задачу повышения к.п.д. привода, его удешевления за счет использования более дешевых материалов и упрощения технологии изготовления его элементов, а также сборки и наладки, а также повышения надежности работы привода.
Поставленная задача решается тем, что в приводе запорного органа с комбинированным управлением от электродвигателя и вручную, содержащем корпус, в котором расположена только с возможностью осевого перемещения кулачковая муфта для поочередного принудительного зацепления либо с кулачками, кинематически связанными с валом электродвигателя, либо с кулачками, кинематически связанными с валом маховика ручного дублера, механизм принудительного перемещения кулачковой муфты с фиксатором ее положения и выходной вал, выходной вал выполнен в виде вала шестерни, установленного соосно валу электродвигателя и снабженного тормозом, а ось вала маховика ручного дублера расположена в корпусе перпендикулярно оси электродвигателя. Вал ручного дублера посредством конической шестерни кинематически связан с коническим колесом, установленным посредством подшипников в корпусе соосно валу электродвигателя. При этом на внутренней поверхности конического колеса выполнены кулачки. В заявленном приводе кулачковая муфта состоит из двух полумуфт, одна из которых выполнена составной и содержит стакан, на котором соосно ему установлена с возможностью вращения вокруг оси шлицевая вилка. На внешней боковой поверхности шлицевой вилки выполнены кулачки с возможностью взаимодействия с кулачками, выполненными на зубчатом колесе. Стакан первой полумуфты выполнен с буртом в верхней части, на боковых сторонах стакана диаметрально выполнены, по крайней мере, два отверстия с рабочими профильными поверхностями, а на внешней торцевой поверхности стакана диаметрально размещены, по крайней мере, два кулачка. На валу электродвигателя установлен, например, с помощью шлицевого соединения направляющий вал под стакан первой полумуфты, причем на боковой поверхности направляющего вала диаметрально закреплены пальцы с возможностью взаимодействия с рабочими профильными поверхностями стакана. На свободном конце направляющего вала посредством подшипников установлена вторая полумуфта на торцевой поверхности, которой закреплены кулачки с возможностью взаимодействия с кулачками, закрепленными на торцевой поверхности стакана. На боковой же поверхности второй полумуфты выполнены продольные пазы под шлицы шлицевой втулки. Также во второй полумуфте посредством шпонки установлен выходной вал-шестерня. Механизм же принудительного перемещения кулачковой муфты снабжен рычагом с возможностью взаимодействия с буртом стакана первой полумуфты.
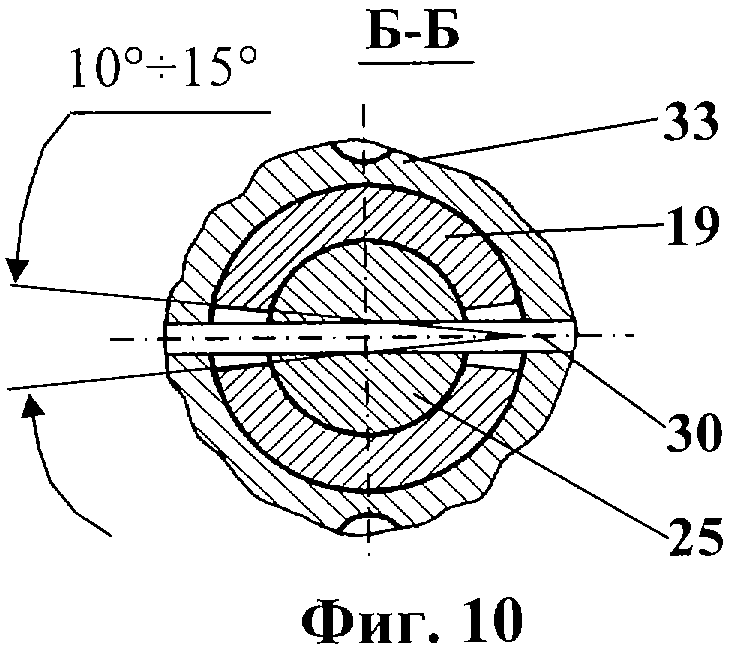
Тормоз выходного вала привода может быть выполнен, например, в виде подвижного кольца, установленного на выходном валу посредством той же шпонки, что и выходной вал установлен во второй полумуфте. При этом подвижное кольцо тормоза подпружинено относительно выходного вала в осевом направлении и снабжено тормозными башмаками с возможностью взаимодействия их с неподвижным кольцом, установленным в корпусе. Причем на торцевой поверхности второй полумуфты установлены, по крайней мере, два конусных кулачка, торцы которых взаимодействуют с ответными поверхностями, выполненными на подвижном кольце тормоза. Для обеспечения автоматического отключения тормоза пазы под шпонку во второй полумуфте выполнены таким образом, что обеспечивают люфт относительного поворота второй полумуфты и подвижного кольца тормоза, который равен 10÷15°.
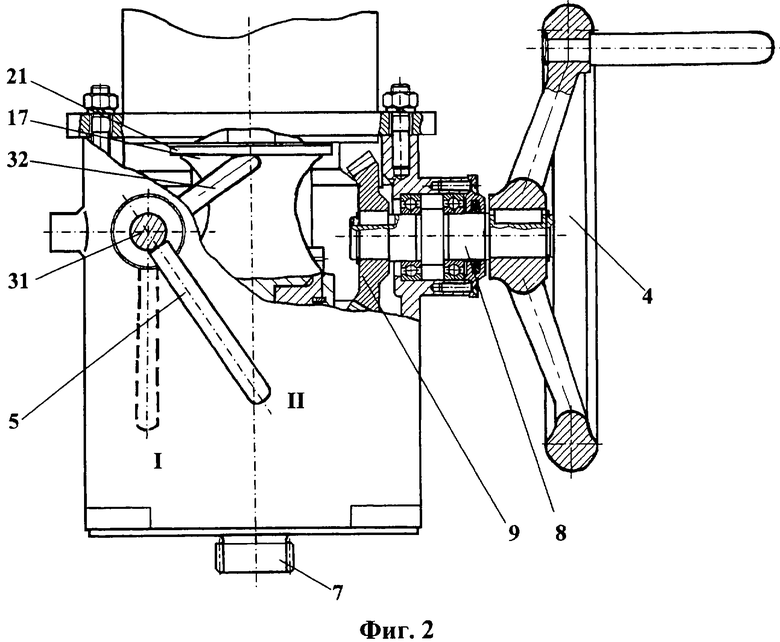
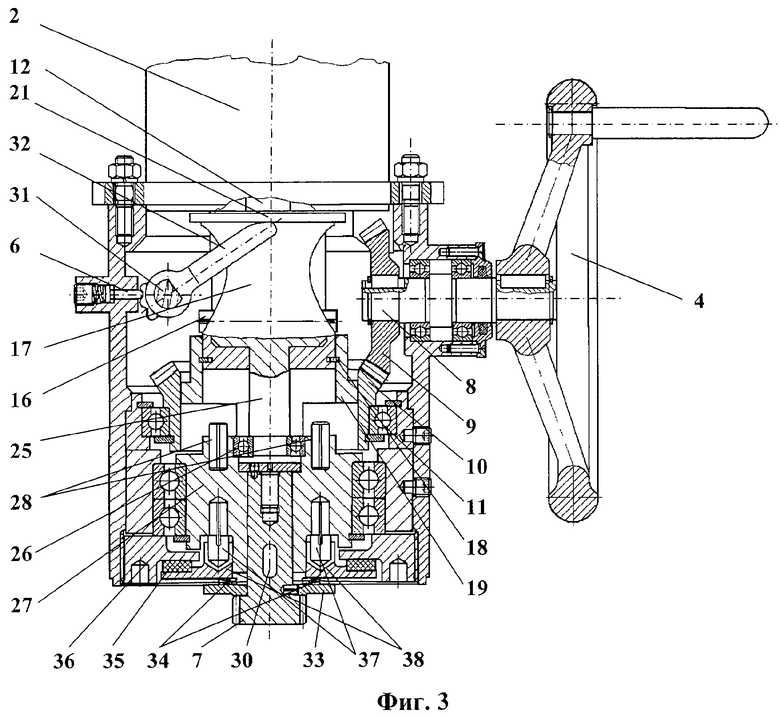
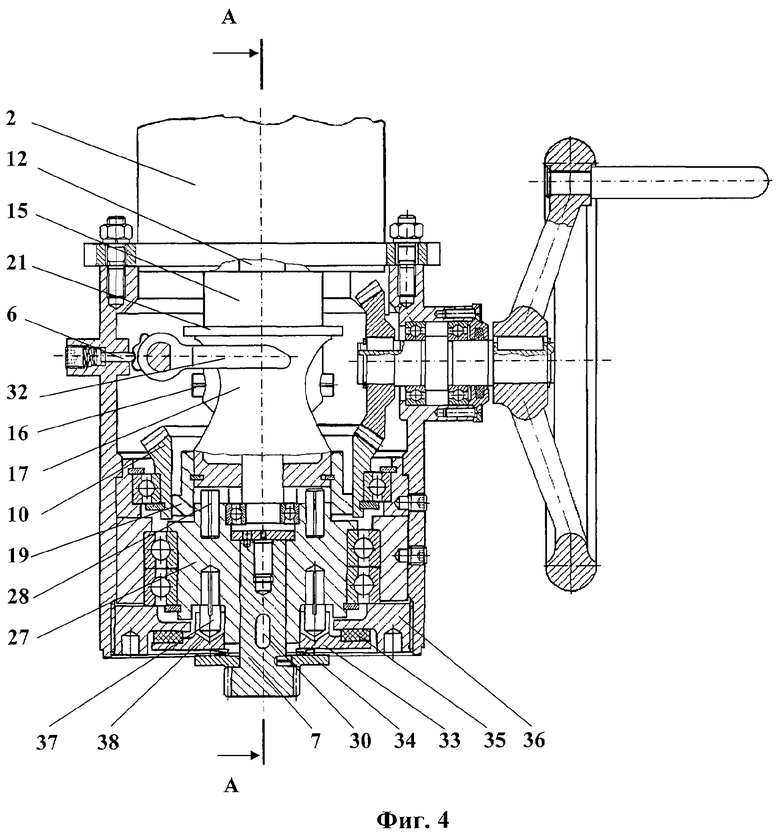
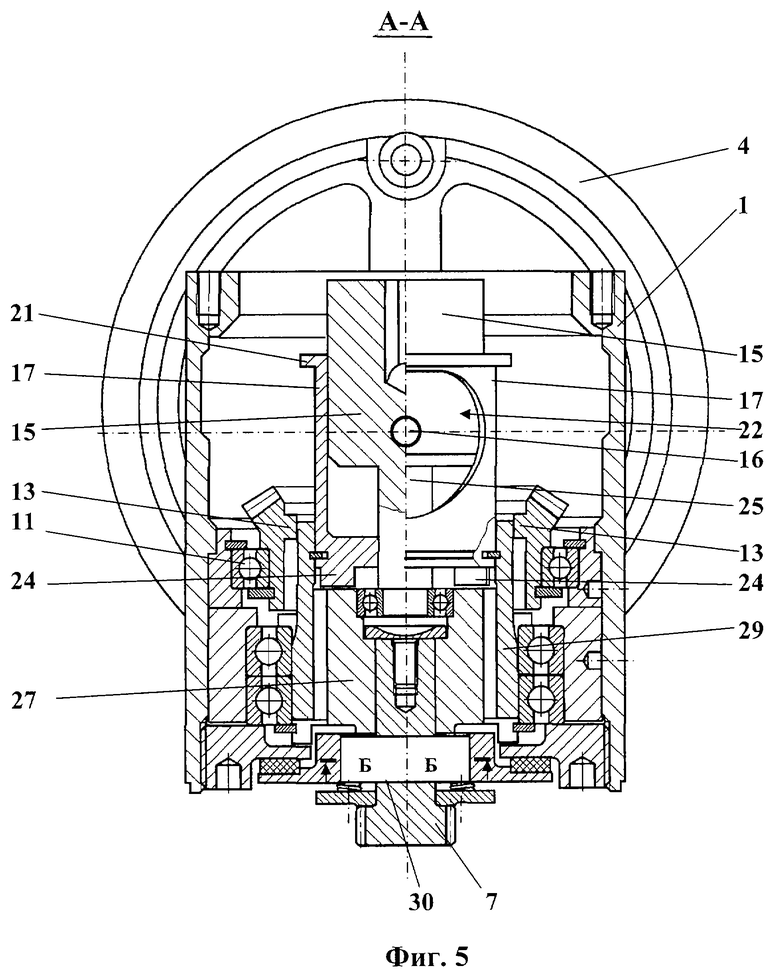
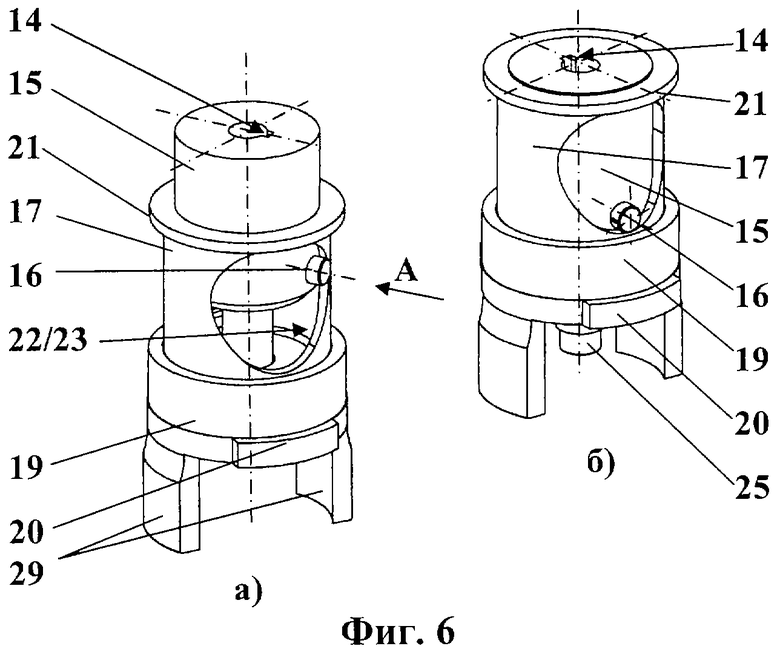
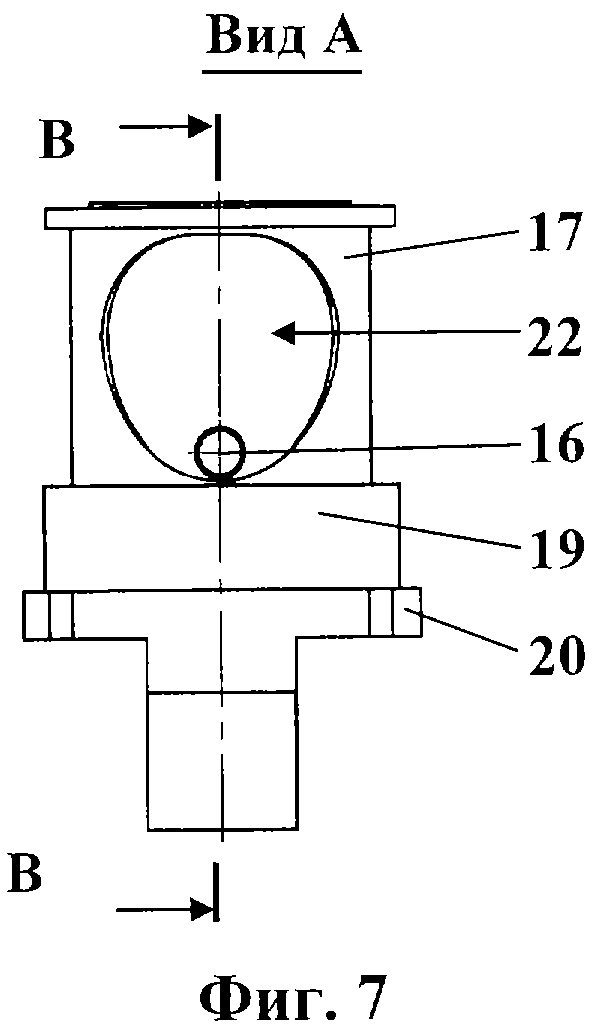
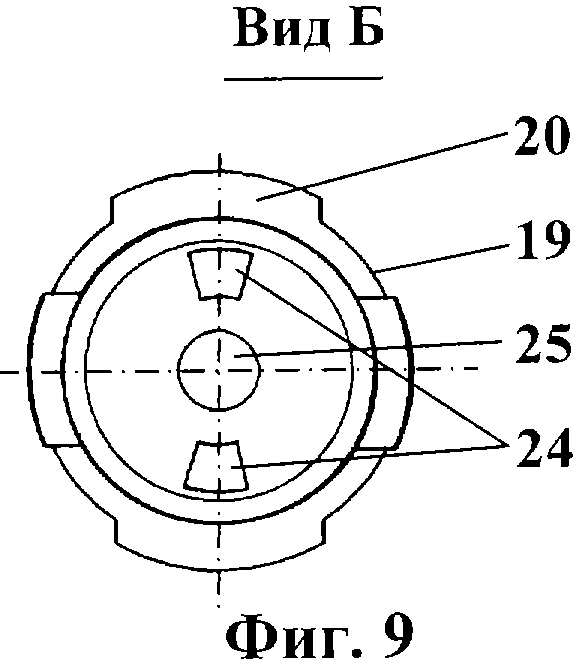
Пример реализации изобретения иллюстрируется следующими чертежами. На фиг.1 представлен общий вид привода; на фиг.2 - частичный разрез привода при работе от ручного дублера; на фиг.3 - продольный разрез привода при работе от ручного дублера; на фиг.4 - продольный разрез привода при работе от электродвигателя; на фиг.5 - разрез А-А фиг.4 (при снятом электродвигателе); на фиг.6 представлено объемное изображение положения первой полумуфты относительно направляющего вала: а) при работе привода от электродвигателя и б) при работе привода от ручного дублера; на фиг.7 - вид А фиг.6,а; на фиг.8 - продольный разрез В-В фиг.7; на фиг.9 - вид Б фиг.7; на фиг.10 - разрез Б-Б фиг.5.
Привод запорного органа с комбинированным управлением от электродвигателя и вручную содержит корпус 1, к одному из фланцев которого присоединен электродвигатель 2, а к другому - ручной дублер 3 с маховиком 4. Привод содержит также механизм переключения режима работы привода с электрического на ручной, снабженный рукояткой 5 и фиксатором ее положения 6. Выходной вал привода выполнен в виде вала-шестерни 7.
Ось вала 8 маховика 4 ручного дублера 3 расположена в корпусе 1 перпендикулярно оси электродвигателя 2. Вал 8 ручного дублера 3 посредством конической шестерни 9 кинематически связан с коническим колесом 10, установленным посредством подшипников 11 в корпусе 1 соосно валу 12 электродвигателя 2. При этом на внутренней поверхности конического колеса 10 выполнены два кулачка 13.
На валу электродвигателя 2 установлен, например, с помощью шлицевого соединения 14 направляющий вал 15, причем на боковой поверхности направляющего вала 15 диаметрально закреплены пальцы 16.
Кулачковая муфта переключения режимов работы привода состоит из двух полумуфт. Одна из полумуфт выполнена составной и содержит стакан 17, на котором соосно ему установлена с возможностью вращения вокруг оси посредством стопорного кольца 18 шлицевая вилка 19. На внешней боковой поверхности шлицевой вилки 19 выполнены два кулачка 20 с возможностью взаимодействия с кулачками 13, выполненными на зубчатом колесе 10. Стакан 17 первой полумуфты выполнен с буртом 21 в верхней части. На боковых сторонах стакана 17 диаметрально выполнены два отверстия 22 с рабочими профильными поверхностями 23, а на внешней торцевой поверхности стакана диаметрально размещены, по крайней мере, два кулачка 24. Стакан 17 установлен на направляющем валу 15, и его рабочие профильные отверстия взаимодействуют с пальцами 16, закрепленными в направляющем валу 15.
На свободном конце 25 направляющего вала 15 посредством подшипников 26 установлена вторая полумуфта 27, на торцевой поверхности которой закреплены кулачки 28 с возможностью взаимодействия с кулачками 24, закрепленными на торцевой поверхности стакана 17. На боковой же поверхности второй полумуфты 27 выполнены продольные пазы 28 под шлицы 29 шлицевой втулки 19. Также во второй полумуфте 27 посредством шпонки 30 установлен выходной вал-шестерня 7.
Для принудительного перемещения кулачковой муфты с режима работы от электродвигателя на ручное в корпусе 1 привода на валу 31 установлен рычаг 32 в виде вилки с рукояткой 5. Рычаг-вилка 32 взаимодействует с двух сторон на бурт 21 стакана 17 первой полумуфты, исключая перекос положения стакана 17 на направляющем валу 15 в процессе его перемещения. Положение рычага-вилки 32 фиксируется фиксатором 6.
Тормоз выходного вала шестерни 7 привода выполнен в виде подвижного кольца 33, установленного на выходном валу посредством шпонки 30. При этом подвижное кольцо 33 тормоза подпружинено пружинами 34 относительно выходного вала 7 в осевом направлении и снабжено тормозными башмаками 35 с возможностью взаимодействия их с неподвижным кольцом 36, установленным в корпусе 1. Причем на торцевой поверхности второй полумуфты 27 установлены, по крайней мере, два конусных кулачка 37, торцы которых взаимодействуют с ответными поверхностями 38, выполненными на подвижном колесе 33 тормоза.
Работа привода осуществляется следующим образом.
При ручном управлении приводом (фиг.2 и 3) поворачивают рукоятку 5 механизма переключения режима работы привода из положения I в положение II. При этом рычаг-вилка 32 воздействует с двух сторон на бурт 21 стакана 17 и перемещает его вдоль направляющего вала 15 в крайне верхнее положение. Стакан 17, связанный посредством стопорного кольца 18 со шлицевой вилкой 19, перемещает вдоль оси направляющего вала 15 также и ее. При этом происходит расцепление кулачков 28, размещенных на торцевой поверхности второй полумуфты 27, и кулачков 24, размещенных на внешней поверхности стакана 17. Одновременно кулачки 20, размещенные на боковой поверхности шлицевой вилки 19, входят в зацепление с кулачками 13, размещенными на коническом колесе 10. В отсутствие вращения элементов привода выходной вал 7 нормально заторможен тормозом. В этом случае подвижное кольцо 33 с тормозными башмаками 35 поджато посредством пружин 34 к неподвижному кольцу 36. При вращении оператором маховика 4 ручного дублера вращающий момент передается через вал 8, коническую шестерню 9, коническое колесо 10, сцепленные кулачки 13 и 20, шлицевую вилку 19, вторую полумуфту 27. В начальный момент вращения второй полумуфты 27 благодаря наличию люфта относительного поворота второй полумуфты 27 и подвижного кольца 33 тормоза выходной вал 7 не вращается. Кулачки 37, закрепленные во второй полумуфте 27, своими конусными поверхностями взаимодействуют с ответными поверхностями 38, выполненными на подвижном кольце 33 тормоза, отводя его от неподвижного кольца 36 и тем самым растормаживая выходной вал 7. После выборки люфта вторая полумуфта 27 передает вращение посредством шпонки 30 на выходной вал-шестерню 7, связанный с основным редуктором (не показано), который и приводит в движение запорный элемент трубопроводной арматуры, открывая или закрывая проход в ее корпусе.
При работе привода от электродвигателя (фиг.4 и 5) вращение от электродвигателя 2, вращение его вала 12 посредством шпоночного соединения 14 передается направляющему валу 15. Пальцы 16, закрепленные в направляющем валу 15, взаимодействуют с рабочими профильными поверхностями 23 стакана 17, перемещая его вдоль направляющего вала 15 в крайне нижнее положение. При этом рычаг-вилка 32 расфиксируется, поворачивается из положения II в положение I и фиксируется фиксатором 6 в новом положении. В свою очередь, стакан 17 перемещает вдоль оси направляющего вала 15 и шлицевую вилку 19. При этом вращение от вала 12 электродвигателя, направляющего вала 15, пальцев 16 и стакана 17 не передается на маховик 4 ручного дублера, так как шлицевая вилка 19, кулачки 20 которой находятся в зацеплении с кулачками 13 конического колеса 10 ручного дублера, установлена на стакане 17 с возможностью вращения вокруг оси посредством стопорного кольца 18.
Одновременно кулачки 20, размещенные на боковой поверхности шлицевой вилки 19, выходят из зацепления с кулачками 13, размещенными на коническом колесе 10, и осуществляется зацепление кулачков 28, размещенных на торцевой поверхности второй полумуфты 27, и кулачков 24, размещенных на внешней поверхности стакана 17. Так происходит автоматическое отключение ручного привода. В этом случае вращение от электродвигателя 2 передается выходному валу- шестерне 7 посредством вала 12 электродвигателя, направляющего вала 15, установленного посредством шпоночного соединения 14 на валу электродвигателя, пальцев 16, закрепленных в направляющем валу 15, стакана 17, кулачков 24 и кулачков 28 второй полумуфты 27, а далее аналогично вышеописанному режиму.
При отсутствии какого-либо управления приводом тормоз обеспечивает надежную фиксацию положения запорного органа трубопроводной арматуры в процессе эксплуатации трубопровода под нагрузкой. Любые вибрации и колебания трубопровода под действием транспортируемой текучей среды не передаются на запорный орган, кинематическая цепь которого замкнута на корпус привода тормозом выходного вала 7.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОПРИВОД С РУЧНЫМ ДУБЛЕРОМ | 2002 |
|
RU2239116C2 |
| Электропривод трубопроводной арматуры с ручным дублером | 2022 |
|
RU2797329C1 |
| ЭЛЕКТРОМОТОРНЫЙ ПРИВОД С РУЧНЫМ ДУБЛЕРОМ | 1996 |
|
RU2103582C1 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1997 |
|
RU2146010C1 |
| ЭЛЕКТРОПРИВОД С РУЧНЫМ ДУБЛЕРОМ | 2006 |
|
RU2323380C2 |
| ПРИВОД ТРУБОПРОВОДНОЙ ЗАПОРНОЙ АРМАТУРЫ | 1998 |
|
RU2132990C1 |
| Электропривод с ручным дублером | 2019 |
|
RU2730750C1 |
| КОМБИНИРОВАННЫЙ ПРИВОД ИСПОЛНИТЕЛЬНОГО МЕХАНИЗМА ОТ ЭЛЕКТРОДВИГАТЕЛЯ И/ИЛИ ОТ РУЧНОГО УСИЛИЯ (ВАРИАНТЫ) | 2002 |
|
RU2226633C1 |
| Устройство управления запорно-регулирующим органом трубопроводной арматуры | 2022 |
|
RU2792715C1 |
| Электрический привод | 1986 |
|
SU1352140A1 |

Изобретение относится к арматуростроению и предназначено для использования в качестве средства комбинированного управления запорным органом на промышленных трубопроводах. Привод с комбинированным управлением от электродвигателя и вручную содержит корпус с расположенной в нем с возможностью осевого перемещения кулачковой муфтой для поочередного принудительного зацепления, механизм принудительного перемещения кулачковой муфты с фиксатором ее положения и выходной вал. Выходной вал в виде вала-шестерни установлен соосно валу электродвигателя и снабжен тормозом. Ось вала маховика ручного дублера расположена в корпусе перпендикулярно оси электродвигателя. Вал ручного дублера посредством конической шестерни кинематически связан с коническим колесом, установленным соосно валу электродвигателя. На внутренней поверхности конического колеса выполнены кулачки. Кулачковая муфта состоит из двух полумуфт. Первая полумуфта выполнена составной и содержит стакан. На нем установлена с возможностью вращения вокруг оси шлицевая вилка. На внешней боковой поверхности вилки выполнены кулачки для взаимодействия с кулачками на зубчатом колесе. Стакан выполнен с буртом в верхней части. На боковых сторонах стакана диаметрально выполнены, по крайней мере, два отверстия с рабочими профильными поверхностями. На внешней торцевой поверхности стакана диаметрально размещены, по крайней мере, два кулачка. На валу электродвигателя установлен с помощью шлицевого соединения направляющий вал под стакан первой полумуфты. На боковой поверхности направляющего вала диаметрально закреплены пальцы с возможностью взаимодействия с рабочими профильными поверхностями стакана. На свободном конце направляющего вала установлена вторая полумуфта. На торцевой поверхности полумуфты закреплены кулачки с возможностью взаимодействия с кулачками на торцевой поверхности стакана. На боковой поверхности второй полумуфты выполнены продольные пазы под шлицы шлицевой втулки. Во второй полумуфте посредством шпонки установлен выходной вал-шестерня. Механизм принудительного перемещения кулачковой муфты снабжен рычагом-вилкой с возможностью взаимодействия с буртом стакана первой полумуфты. Изобретение направлено на повышение безопасности управления приводом за счет устранения ударных нагрузок в маховике ручного дублера. 1. з.п. ф-лы, 10 ил.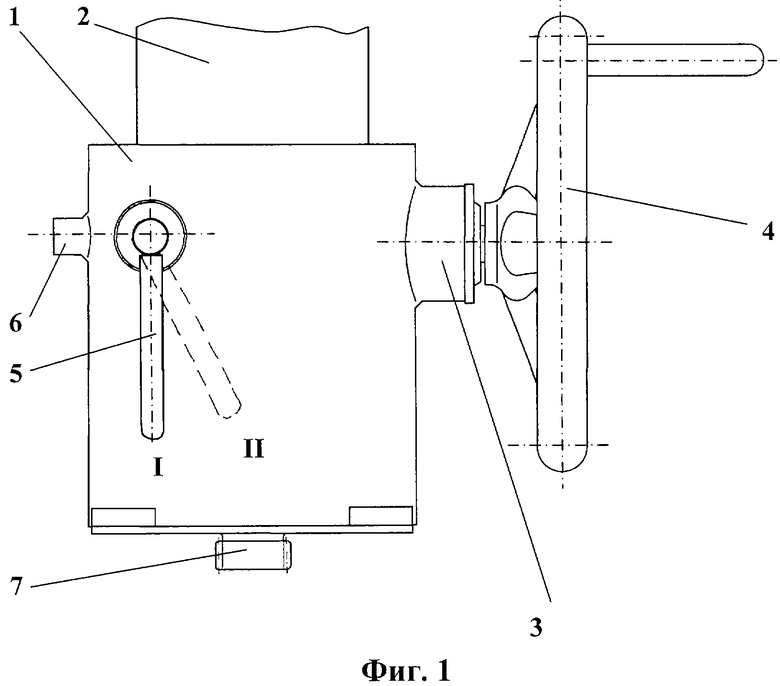
| ЭЛЕКТРОМОТОРНЫЙ ПРИВОД С РУЧНЫМ ДУБЛЕРОМ | 1996 |
|
RU2103582C1 |
| ЭЛЕКТРОПРИВОД С РУЧНЫМ ДУБЛЕРОМ | 2002 |
|
RU2239116C2 |
| Ручной дублер электропривода | 1986 |
|
SU1390466A1 |
| US 4474078 A, 02.10.1984 | |||
| СЫРЬЕВАЯ СМЕСЬ ДЛЯ ИЗГОТОВЛЕНИЯ МЕЛКОЗЕРНИСТОГО БЕТОНА | 2016 |
|
RU2613065C1 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |

