Изобретение относится к фотограмметрии и может использоваться в строительстве, архитектуре, медицине и других областях для определения пространственных координат точек объектов или параметров их поверхности по фотографическим снимкам, в том числе по снимкам, не имеющим координатных меток.
Известен, например, способ определения пространственных координат точек объекта включающий:
- фотографирование объекта с нескольких позиций камерой, имеющей координатные метки;
- измерение координат меток на фотографических снимках в системе координат измерительного прибора;
- опознавание изображенных точек объекта на фотографических снимках;
- измерение координат опознанных точек фотографических снимков в системе координат измерительного прибора;
- перевычисление измеренных координат опознанных точек в систему координат фотографических снимков, определяемую координатными метками;
- определение элементов внутреннего и внешнего ориентирования фотографических снимков по изображениям точек с известными пространственными координатами - опорных точек;
- вычисление пространственных координат точек объекта [Лобанов А.Н., Дубиновский В.Б., Машимов М.М., Овсянников Р.П. Аналитическая пространственная фототриангуляция. - М.: Недра, 1991, с. 55-56, 238-244].
При этом элементы ориентирования фотографических снимков и пространственные координаты точек объекта определяются на основе известных фотограмметрических зависимостей [Лобанов А.Н. Фотограмметрия. - М.: Недра, 1984, с. 146-149]:

где x, y - измеренные координаты точки в системе координат снимка;
x0, y0 - координаты главной точки в системе координат снимка;
f - фокусное расстояние снимка;
X, Y, Z - пространственные координаты соответствующей точки в выбранной системе координат объекта;
Xs, Ys, Zs - координаты точки фотографирования (центра проекции) S в системе координат объекта;
аi, bi, ci (i: = 1. ..3) - направляющие косинусы углов наклона α, ω и разворота - к снимка.
В уравнении (1) x0, y0, f относятся к элементам внутреннего, а Xs Ys, Zs и α, ω, к - соответственно к линейным и угловым элементам внешнего ориентирования фотографических снимков. В общем случае, способ предусматривает одновременное определение всех элементов ориентирования снимков и пространственных координат точек объекта.
Для определения неизвестных используют их приближенные значения, а уравнения (1) приводят к линейному виду
 (2)
(2)
где δx0,δy0,δf - поправки к приближенным значениям неизвестных элементов внутреннего ориентирования снимка;
δα, δω,..., δZs - поправки к приближенным значениям неизвестных элементов внешнего ориентирования снимка;
δX, δY, δZ - поправки к приближенным значениям неизвестных координат точки объекта;
a, b,...,m - частные производные от функций (1) по соответствующим переменным;
xвыч, yвыч - координаты точки снимка, вычисленные по формулам (1) с использованием приближенных значений неизвестных;
νx, νy - поправки к измеренным координатам точки снимка.
В уравнениях (2) содержится 12 неизвестных - поправки к приближенным значениям трех элементов внутреннего ориентирования, шести элементов внешнего ориентирования фотографического снимка и трех координат определяемой точки объекта. Если точка местности является опорной, то уравнения (2) будут содержать только 9 неизвестных - поправок к приближенным значениям элементов внутреннего и внешнего ориентирования снимка. Согласно способу число уравнений поправок для каждого включенного в обработку фотографического снимка равно
N=2k, (3)
где k - количество опознанных и измеренных на снимке точек.
Определение неизвестных производится путем составления системы уравнений поправок для всех измеренных точек и решения ее по методу наименьших квадратов путем последовательных приближений. При этом общее число уравнений поправок должно быть всегда больше числа неизвестных. В связи с необходимостью определения значительного количества дополнительных неизвестных (элементов внутреннего и внешнего ориентирования снимков), способ предполагает решение системы уравнений большого порядка. Определение координат точек этим способом является достаточно дорогостоящим, так как для получения фотоснимков требуются специальные топографические камеры, снабженные координатными метками и особая широкоформатная фотопленка.
Известен также способ бесконтактного измерения объектов [патент США N 5251156, МПК G 01 В 11/24], который включает получение фотографических снимков измеряемого объекта из нескольких позиций посредством двухосевой камеры, имеющей координатные метки. Используя полученные снимки и на основе приведенных выше формул вычисляют пространственные координаты точек объекта. Этот способ по наибольшему количеству сходных с заявляемым признаком принят за прототип изобретения.
Определение координат точек по прототипу является достаточно дорогостоящим, особенно при съемке объектов небольшой протяженности (архитектурные памятники, строения, модели объектов и др.), так как для получения фотографических снимков требуются специальные топографические камеры, снабженные координатными метками, и особая широкоформатная фотопленка. При этом необходимо выполнение измерений координат полученных на снимках координатных меток и дальнейшего сложного перевычисления измеренных координат точек в систему координат снимка. Если же снимки получены камерой, не имеющей координатных меток, требуется проведение дополнительных работ по их заданию.
Предлагаемое изобретение решает задачу упрощения бесконтактного (фотограмметрического) способа определения координат точек объекта и снижения стоимости выполнения работ за счет использования камер упрощенной конструкции, не имеющих координатных меток, и исключения работ по их заданию, а также обеспечения возможности проведения измерений, доизмерений или переизмерений без "привязки" к какой-либо плоской системе координат измерительного прибора или снимка.
Поставленная задача решается тем, что предлагается способ определения координат точек объекта, который включает фотографирование объекта с нескольких разных позиций любой камерой, в том числе и не имеющей координатных меток, опознавание точек изображения объекта на снимках, измерение расстояний между опознанными точками снимков и вычисление пространственных координат определяемых точек объекта - X, Y, Z исходя из формулы:
где di-j - расстояние на фотографическом снимке между опознанными точками i и j;
x' = a1(X-Xs)+c1(Z-Zs);
y' = a2(X-Xs)+b2(Y-Ys)+c2(Z-Zs);
z' = a3(X-Xs)+b3(Y-Ys)+c3(Z-Zs);
a1 = cos α;
a2 = -sin α sin ω;
a3 = -sin α cos ω;
b2 = cos ω;
b3 = -sin ω;
c1 = sin α;
c2 = cos α sin ω;
c3 = cos α cos ω.
При вычислениях также определяются: фокусное расстояние -f, линейные - Xs, Ys, Zs и угловые - α, ω элементы внешнего ориентирования снимков.
На чертеже представлена схема, поясняющая геометрическую сущность фотограмметрических построений предлагаемого способа. На схеме изображены: P - снимок; S - центр проекции; O, X, Y, Z - заданная пространственная система координат объекта; S, X, Y, Z - система координат, параллельная O, X, Y, Z с началом в точке S; A, B, I, J - точки местности; a, b, i, j - изображения точек A, B, I, J на снимке.
Преимущество уравнения (3) в сравнении с известными и применяемыми на практике состоит в том, что оно содержит только пять элементов внешнего ориентирования α, ω, Xs, Ys, Zs, фокусное расстояние - f снимка и одновременно пространственные координаты двух точек объекта - Xi, Yi, Zi, Xj, Yj, Zj, расстояние между которыми на снимке di-j известно. Координаты же главной точки (x0, y0) и угол разворота (к) снимка в этом способе в отличие от ранее известных не используются.
Для определения неизвестных используют их приближенные значения, а уравнение (4) приводят к линейному виду
где a, b, . .., m - частные производные функции (4) по соответствующим неизвестным;
dвыч - расстояние между i-ой и j-ой точками снимка, вычисленные по формуле (4) с использованием приближенных значений неизвестных;
νd - поправки к измеренному расстоянию между i-ой и j-ой точками снимка.
В общем случае уравнение (5) содержит 12 неизвестных - поправки к приближенным значениям пяти элементов внешнего ориентирования, фокусного расстояния снимка и шести пространственных координат двух точек объекта. Если измерено расстояние между двумя опорными точками, то уравнение (5) будет содержать только шесть неизвестных - поправки к приближенным значениям элементов внешнего ориентирования и фокусного расстояния снимка. Согласно предлагаемому способу число уравнений поправок, возникающих при наличии k точек на снимке, равно числу сочетаний из k по два:
что в (k-1)/4 раза больше, чем при обработке снимков на основе уравнения (1).
Пусть имеем систему уравнений поправок вида (5), составленную по изображениям опорных и определяемых точек объекта для всех включенных в обработку снимков. Тогда, если количество уравнений поправок больше количества неизвестных, эту систему решают по методу наименьших квадратов последовательными приближениями и находят искомые неизвестные.
Способ осуществляют следующим образом.
Исследуемый объект фотографируют любой камерой, предпочтительно камерой упрощенной конструкции, не имеющей координатных меток (например, любительским фотоаппаратом), из нескольких (по крайней мере двух), произвольно выбранных позиций (точек пространства). На полученных снимках опознают точки изображения объекта. Измеряют на каждом снимке расстояния между опознанными точками объекта при помощи любого фотограмметрического прибора, например монокомпаратора или обычной линейки. Далее, используя значения измеренных расстояний, пространственных координат опорных точек и приближенные значения неизвестных, на основе уравнения (4) вычисляют пространственные координаты точек объекта в системе координат объекта, а также фокусное расстояние и элементы внешнего ориентирования снимков. Необходимые для решения задачи приближенные значения неизвестных определяют заранее, с помощью известных в фотограмметрии приемов.
Этот способ может использоваться и при обработке снимков, полученных камерой, имеющей координатные метки для упрощения вычислений.
Таким образом, описанный способ позволяет определить пространственные координаты точек объекта с использованием более дешевой любительской камеры и пленки, а также упростить вычисления за счет сокращения части элементов внутреннего и внешнего ориентирования снимков. Точность определения пространственных координат объекта при этом не ниже, чем при использовании известных ранее методов.
Пример.
Определяют пространственные координаты точек объекта размером 5х5х4 метра. Объект фотографируют малоформатной (формат кадра 24х36 мм) любительской фотокамерой серийного производства "Киев-19" с объективом "Гелиос-81Н" (f=50 мм) с четырех произвольно расположенных позиций. Полученные снимки имеют масштаб 1/140, а их взаимные углы наклона составляют 15 - 20o. Число опорных точек равно 12.
На снимках производят измерения, используя монокомпаратор "Аскорекорд", с точностью 1-2 мкм. По описанной выше методике получают пространственные координаты 50 запроектированных точек объекта (например, для точки с номером 25 получены координаты: X=6,504 м; Y=1,893 м; Z=45,751 м). Оценку качества полученных результатов выполняют путем вычисления средних квадратических погрешностей MX, MY, MZ, определения пространственных координат на контрольных точках объекта (точках, истинные пространственные координаты которых известны заранее, но не включенных в число опорных). Ошибки определения пространственных координат точек объекта составляют: МX - 0,005 м, МY - 0,005 м, MZ - 0,011 м. Полученная точность определения плановых координат точек объекта соответствует требуемой при проведении обмерочных работ II (точного) и I (высокоточного) классов для целей создания чертежей фасадов и деталей в масштабах 1:50-1:20 в архитектурной фотограмметрии. Относительная ошибка определения высоты Mz/H составляет порядка 1/700, что является хорошим результатом при использовании малоформатных любительских камер.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ЭЛЕМЕНТОВ ВНЕШНЕГО ОРИЕНТИРОВАНИЯ | 1993 |
|
RU2082093C1 |
| Способ определения координат точек местности | 2024 |
|
RU2831494C1 |
| Способ определения элементов внешнего ориентирования снимка по изображениям летательных аппаратов | 2022 |
|
RU2789986C1 |
| СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ КООРДИНАТ ТОЧЕК ОБЪЕКТОВ, НАХОДЯЩИХСЯ В ЖИДКОСТИ | 2003 |
|
RU2248523C1 |
| Способ определения координат объекта по стереопаре его снимков и по снимку летательных аппаратов | 2024 |
|
RU2840058C1 |
| Способ определения элементов ориентирования фотоснимка местности | 1990 |
|
SU1770744A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ СДВИГОВ | 1992 |
|
RU2044261C1 |
| Способ обновления топографической карты, созданной по аэрофотоснимкам | 1990 |
|
SU1797689A3 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЭЛЕМЕНТОВ ОРИЕНТИРОВАНИЯ СНИМКА МЕСТНОСТИ | 1996 |
|
RU2124181C1 |
| УНИВЕРСАЛЬНЫЙ СТЕРЕОФОТОГРАММЕТРИЧЕСКИЙ | 1973 |
|
SU382919A1 |
Изобретение относится к фотограмметрии и может быть использовано в строительстве, архитектуре, медицине и других областях для определения пространственных координат точек объекта, параметров поверхности объекта по фотографическим снимкам, в том числе не имеющим координатных меток. Способ включает фотографирование объекта с нескольких позиций (точек пространства), опознавание точек изображения объекта на каждом снимке, измерение расстояний между опознанными точками на каждом снимке и вычисление пространственных координат точек объекта X, Y, Z исходя из заявленной математической формулы. При вычислении пространственных координат точек объекта вычисляют также фокусное расстояние, линейные и угловые элементы внешнего ориентирования полученных фотографических снимков, а непосредственно фотографирование объекта осуществляют камерой, не имеющей координатных меток. Технический результат: упрощение фотограмметрического способа определения координат точек объекта и снижение стоимости выполнения этих работ. 2 з.п. ф-лы, 1 ил.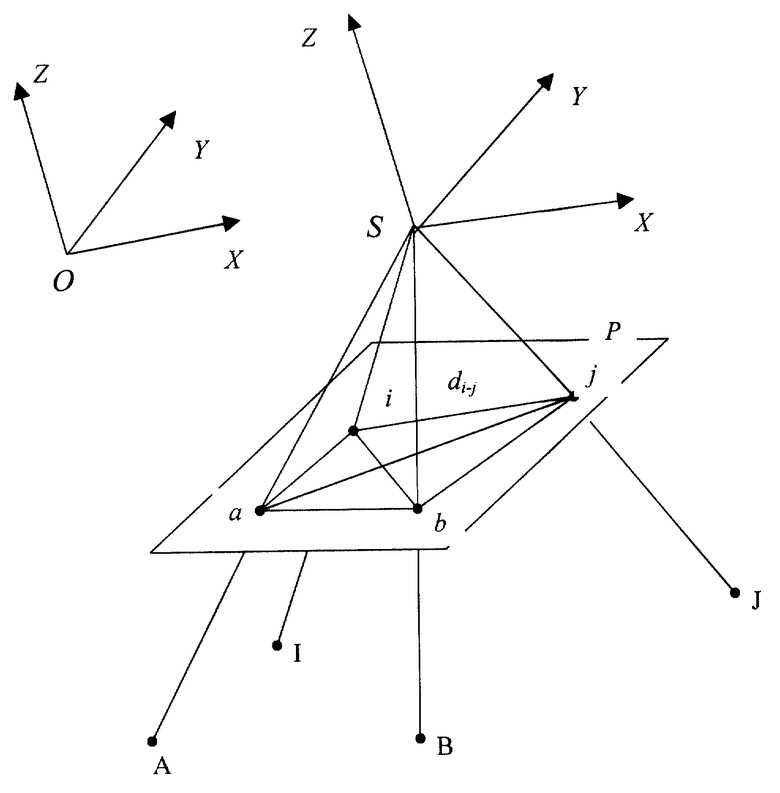

где x' = a1(X - XS) + c1(Z - ZS);
y' = a2(X - XS) + b2(Y - YS) + c2(Z - ZS);
z' = a3(X - XS) + b3(Y - YS) + c3(Z - ZS;
a1 = cos α;
a2 = -sin α sin ω;
a3 = -sin α cos ω;
b2 = cos ω;
b3 = -sin ω;
c1 = sin α;
c2 = cos α sin ω;
c3 = cos α cos ω;
di-j - расстояние на фотографическом снимке между точками i и j;
f - фокусное расстояние фотографического снимка;
XS, YS, YS - линейные элементы внешнего ориентирования фотографического снимка;
α, ω - угловые элементы внешнего ориентирования фотографического снимка;
X, Y, Z - пространственные координаты точки объекта.
| US 5251156 A, 5.10.1993 | |||
| Лобанов А.Н | |||
| и др | |||
| Аналитическая пространственная фототриангуляция | |||
| - М.: Недра, 1991, с.55-244 | |||
| Лобанов А.Н | |||
| Фотограмметрия | |||
| - М.: Недра, 1984, с.146 - 149. |

