Изобретение относится к оптико-электронным следящим системам (ОЭСС) и может быть использовано в следящих координаторах (СК) с модуляцией принимаемого излучения.
Такой следящий координатор описан, например, в [1]. Он содержит гироскопический привод, основным элементом которого является трехстепенной астатический гироскоп, который содержит карданный подвес с установленным в нем ротором-магнитом, несущим на себе оптическую систему, оптическая система формирует изображение излучающего объекта в фокальной плоскости, где устанавливается модулирующий диск - анализатор изображения (АИ), на который нанесен рисунок, определяющий функцию пропускания АИ, содержащую код угла рассогласования между визирной осью СК и направлением на объект. Непосредственно за АИ расположен фотоприемник (ФП), установленный в подвесе. Выходной сигнал ФП поступает в электронный блок, который преобразует его в синусоидальный сигнал управления прецессией ротора гироскопа, поступающий в обмотку прецессии, образующую вместе с гироскопом исполнительный элемент (ИЭ) следящей системы. Управление ИЭ заключается в непрерывном совмещении визирной оси СК (оси вращения ротора) с направлением на объект как в дальней по отношению к объекту зоне, когда ОЭСС воспринимает объект как "точечный" излучатель, так и в ближней зоне. Таким образом, актуальной задачей, решаемой при конструировании ОЭСС, является совершенствование способов преобразования сигнала с ФП в электронном блоке СК в синусоидальный сигнал на частоте вращения ротора гироскопа при известном коде углового рассогласования.
Известен способ [2] формирования сигнала управления ИЭ ОЭСС, эффективно работающий в ближней по отношению к объекту зоне. В качестве АИ в ОЭСС используют полудисковый модулятор. При этом непосредственно величина первой гармоники сигнала с ФП, действующего на частоте вращения модулятора, пропорциональна величине углового отклонения Δ вблизи центра поля зрения. Вместе с тем ее величина также пропорциональна принимаемой мощности излучения. В то же время и постоянная составляющая (среднее значение сигнала), которая не зависит от величины Δ, пропорциональна принимаемой мощности излучения. Стабилизация коэффициента усиления ОЭСС достигается, если в качестве сигнала управления ИЭ используется отношение 1-й гармоники к постоянной составляющей сигнала с ФП. Однако такая ОЭСС практически неработоспособна в дальней к объекту зоне, так как не защищена от помех фона и электромагнитных наводок на частоте вращения магнитного ротора гироскопа.
В описании работы известного устройства [3] последовательность действий, производимых над сигналом с ФП, образует способ формирования сигнала управления ИЭ ОЭСС, который является наиболее близким по своей технической сущности к предлагаемому способу.
Основными блоками устройства являются последовательно соединенные импульсный усилитель с системой автоматической регулировки усиления, полосовой фильтр, амплитудный детектор и избирательный усилитель. Как следует из описания [3] , устройство предназначено для преобразования сигнала с ФП, перед которым установлен вращающийся АИ в виде профилированной щели (например, прямоугольной формы). На фиг. 1 изображена фокальная плоскость оптической системы ОЭСС, описанной в [3].
На фиг. 1 обозначены:
ωo - круговая частота вращения AИ,
l - длина АИ,
а - ширина АИ,
d - диаметр изображения точечного излучателя,
Δ,Φ - величина и фаза углового отклонения точечного излучателя от центра О поля зрения ОЭСС.
В соответствии с фиг. 1 длительность τФП импульса на нулевом уровне сигнала на выходе ФП определяется как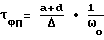
и, следовательно, обратно пропорциональна величине углового отклонения Δ. Таким образом, измеряя значение τФП, принципиально возможно сформировать требуемую пропорциональную зависимость величины сигнала управления АСУ от Δ. В [3] использован косвенный метод построения данной зависимости.
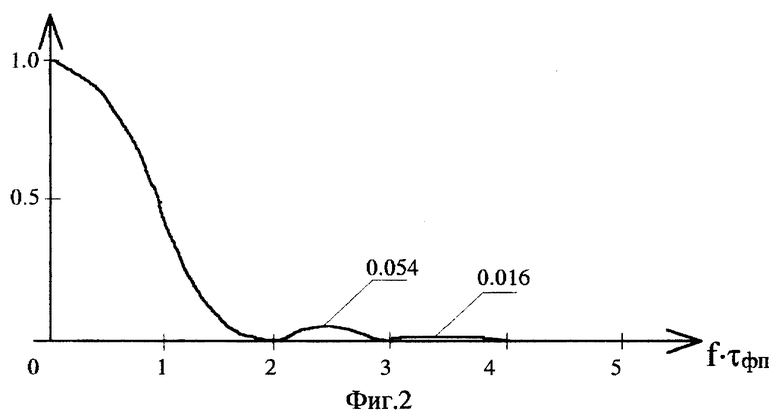
На фиг. 2 изображена приведенная в [4] относительная характеристика спектральной плотности одиночного импульса косинус-квадратной формы, хорошо аппроксимирующего сигнал на выходе ФП, когда диаметр "d" изображения объекта равен ширине "а" АИ (см. фиг. 1).
Для периодической последовательности импульсов, формируемой при вращении АИ с круговой частотой ωo, зависимость на фиг. 2 будет представлять собой линейчатый спектр с основной частотой f0 (f0 = ωo/2π). При этом соответственно f = nf0, где n= 0, 1, 2 ...
Для преобразования относительной зависимости спектральной плотности в абсолютную ее ординаты умножаются на величину АФП • К, где АФП - амплитуда импульсного сигнала, a K=f0• τФП.
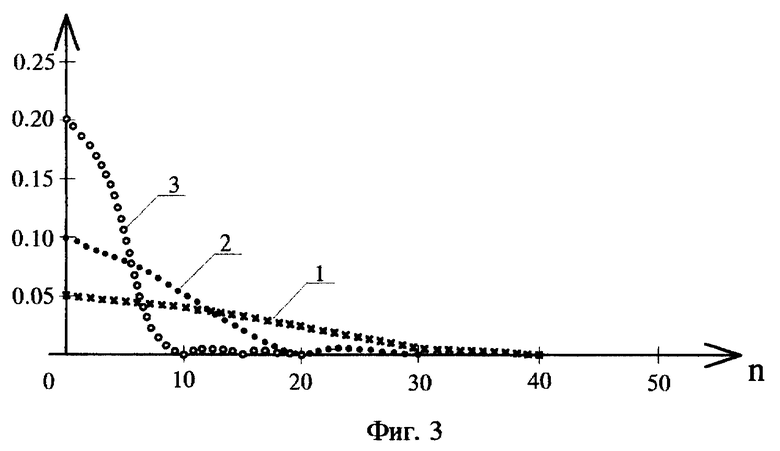
На фиг. 3 представлены приведенные к величине АФП примеры характеристик 1, 2, 3 импульсов различной длительности, соответствующих коэффициентам K1 = 0,05, K2 = 0,1, K3 = 0,2.
Из фиг. 3 следует, что для построения пропорциональной зависимости АСУ (Δ) необходимо использовать диапазон частот (на фиг. 3 справа от 10f0), в котором энергия импульсного сигнала возрастает с уменьшением его длительности τФП. Это условие хорошо согласуется с необходимостью подавления в ОЭСС помех фона (в том числе постоянной засветки), электромагнитных наводок от исполнительного элемента, дрейфа, нуля в схеме предварительной обработки сигнала с фотоприемника. Диапазон частот может быть ограничен и справа с целью оптимизации отношения сигнал/шум и подавления высокочастотных электромагнитных наводок, с учетом того, что известна минимальная длительность τФП полезного сигнала, определяемая величиной Δmax (заданным угловым размером поля зрения ОЭСС, определяемым длиной l АИ). Вместе с тем крутизна пропорциональной зависимости AСУ (Δ) не должна зависеть от величины воспринимаемой ОЭСС мощности излучения, которая при сближении с излучателем может возрастать на (4-5) порядков (обычно допускается увеличение крутизны не более чем в 2-3 раза). Очевидно, что используемый для стабилизации крутизны сигнал (А0) не должен зависеть от величины рассогласования Δ или по меньшей мере не должен быть ей пропорционален. Как следует из фиг. 3, сигнал А0 может быть сформирован из сигнала с фотоприемника с учетом и левой (левее 10f0) части его спектра. При этом сигнал A0 практически будет равен амплитуде сигнала с фотоприемника, которая не зависит от величины Δ в пределах поля зрения, за исключением окрестностей внутренней и внешней границ АИ (см. фиг. 1).
Таким образом, определяется образующая способ формирования сигнала управления исполнительным элементом ОЭСС следующая последовательность действий над сигналом с фотоприемника, реализованная в устройстве, описанном в [3]:
1. Оптимизация отношений сигнал/шум и сигнал/помеха, то есть предварительная обработка сигнала (импульсный усилитель).
2. Стабилизация крутизны зависимости сигнала управления ИЭ при возрастании принимаемой мощности излучения, то есть стабилизация коэффициента усиления ОЭСС (система АРУ импульсного усилителя.
3. В соответствии с известным кодом величины углового отклонения Δ направления на объект от центра поля зрения ОЭСС преобразование сигнала в сигнал, у которого первая гармоника его огибающей пропорциональна величине Δ (полосовой фильтр).
4. Выделение огибающей сигнала (амплитудный детектор).
5. Выделение первой гармоники огибающей сигнала, действующей в требуемой полосе частот (избирательный усилитель).
Способ эффективен в дальней по отношению к объекту зоне, когда ОЭСС воспринимает объект как "точечный" излучатель. По мере сближения с объектом возрастает не только воспринимаемая ОЭСС мощность излучения, но и угловой размер изображения объекта. При реализации данного способа формирования сигнала управления в ближней зоне, когда объект воспринимается ОЭСС как размерный излучатель, ОЭСС практически оказывается неработоспособной в связи с тем, что код углового отклонениями Δ центра "размерного" излучателя от визирной оси ОЭСС в сигнале с ФП изменился.
Ниже рассматриваются примеры, подтверждающие этот эффект.
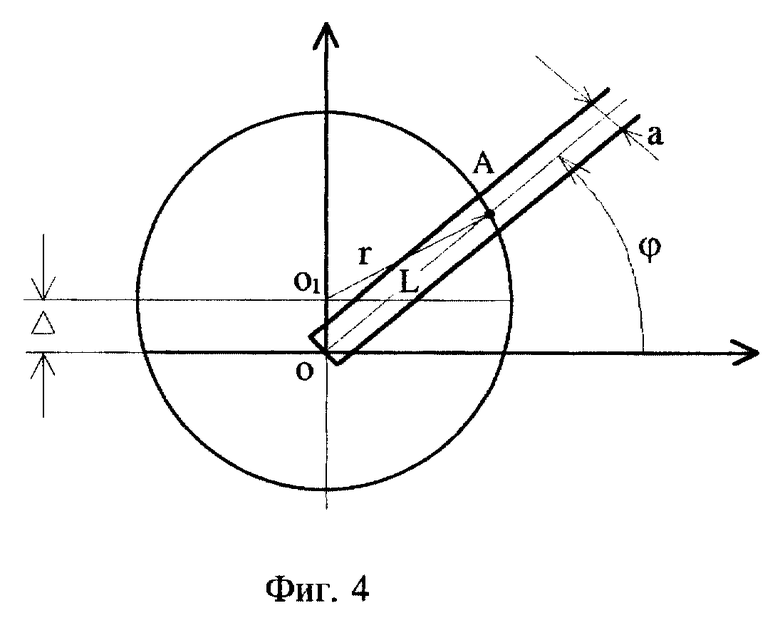
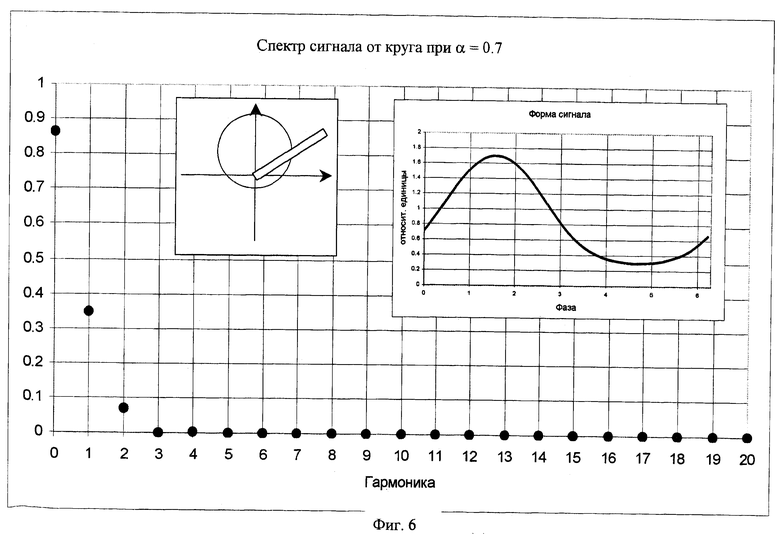
На фиг. 4 приведено изображение "размерного" излучателя в виде круга с равномерно распределенной яркостью и изображение АИ.
На фиг. 4 приняты те же обозначения, что и на фиг. 1. Кроме того, введено обозначение "L" длины "засвеченной" объектом части АИ при его вращении с частотой ωo, при этом r= d/2. На основе фиг. 4 может быть приближенно определено текущее значение АФП сигнала с ФП на периоде вращения АИ (АФП = Кя•a•L, где Kя - масштабный коэффициент, учитывающий значение плотности яркости).
В треугольнике ОО1А:
r2= Δ2+L2-2Δ•L•cos(π/2-Φ).
После преобразований получаем:
где α = Δ/r.
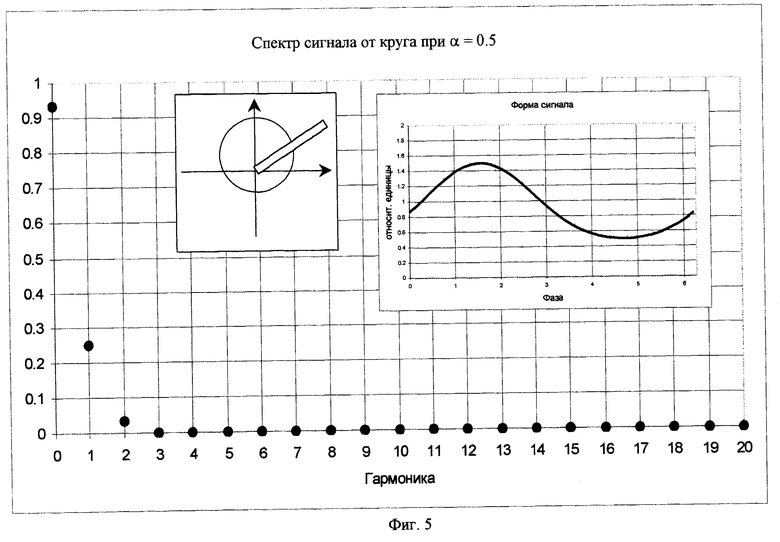
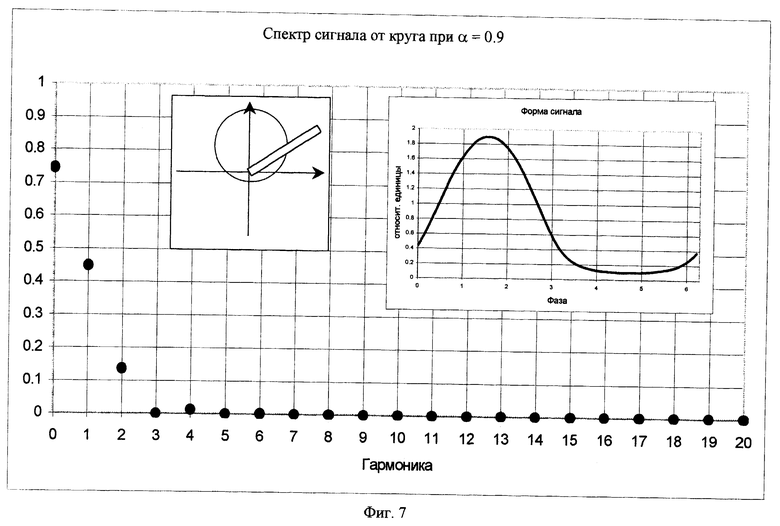
На фиг. 5, 6 и 7 при различных значениях параметра α представлены сигналы с ФП, а также их спектры на периоде вращения АИ. Из чертежей следует, что по меньшей мере при значениях α ≅ 0,7 в спектрах сигналов присутствует либо только нулевая (при α = 0), либо нулевая, первая и вторая гармоники.
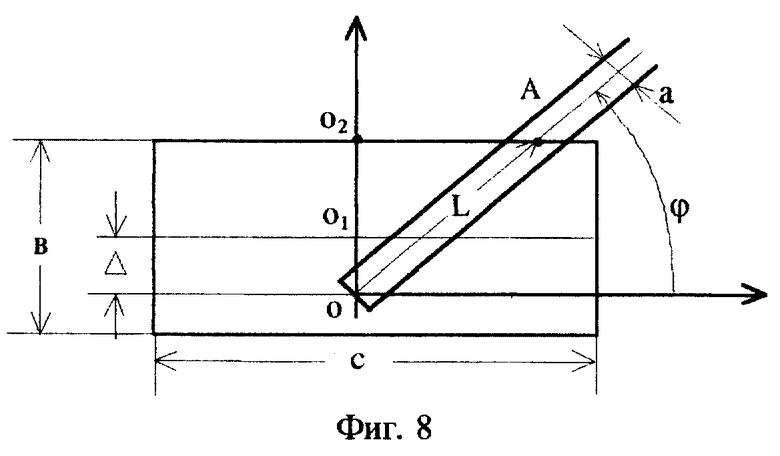
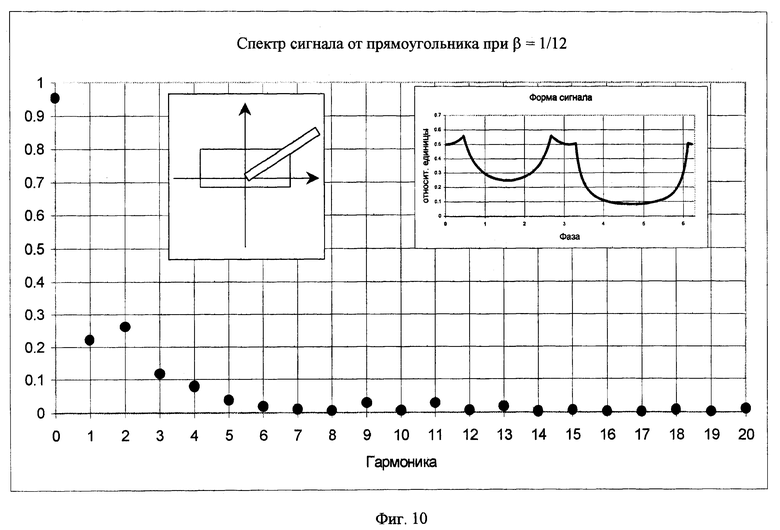
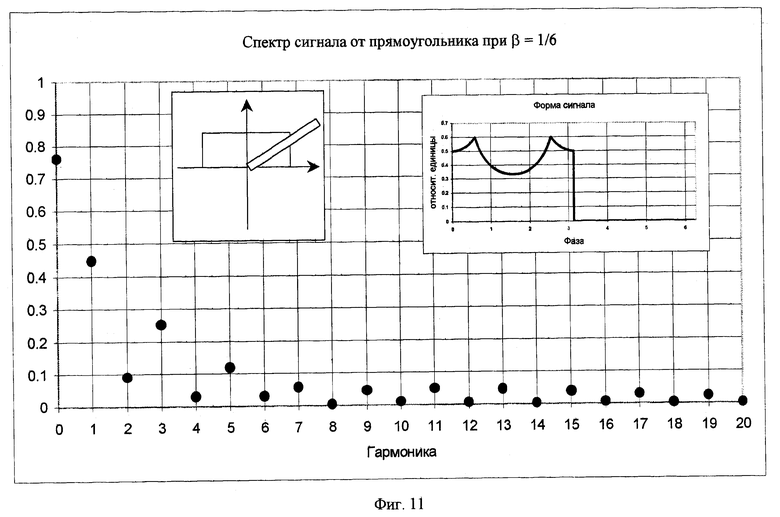
На фиг. 8 приведено изображение "размерного" объекта прямоугольной формы с отношением сторон с/в=3 и показана возможность вычисления величины L.
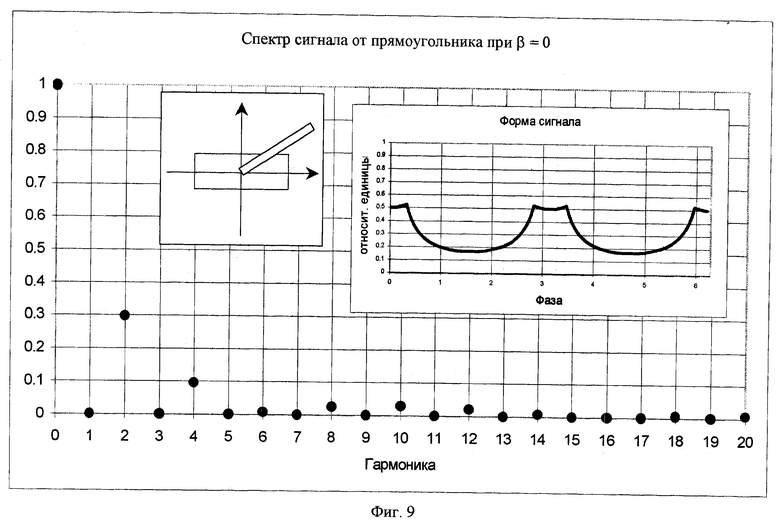
Для различных отношений β = Δ/c на фиг. 9, 10, 11 представлены спектры сигналов с ФП на периоде вращения АИ. Спектры сигналов от объекта прямоугольной формы богаче, чем спектры сигналов от объекта круглой формы, но, тем не менее, эти сигналы практически полностью подавляются при оптимизации отношения сигнал-помеха (например, в импульсном усилителе устройства, описанного в [3]. Таким образом, в ближней зоне в зависимости Асу (Δ) формируется зона нечувствительности. Вне этой зоны крутизна зависимости Асу (Δ) уменьшается по сравнению с крутизной в дальней к объекту зоне. Очевидно, что, начиная с некоторого расстояния до объекта, величина зоны нечувствительности становится недопустимо большой, а крутизна - недопустимо малой. При этом точностные и динамические характеристики ОЭСС оказываются несоответствующими требуемым, что может привести к срыву процесса сопровождения объекта.
Таким образом, недостатком известного способа, выбранного в качестве прототипа, является ограниченность области его использования.
Задачей изобретения является создание способа формирования из сигнала фотоприемника сигнала управления исполнительным элементом оптико-электронной следящей системы, эффективно работающего как в ближней, так и в дальней к объекту зоне.
Для достижения этого технического результата предлагается способ формирования из сигнала фотоприемника сигнала управления исполнительным элементом ОЭСС, в соответствии с которым оптимизируют отношения сигнал/помеха и сигнал/шум в дальней от объекта слежения зоне, стабилизируют величину сигнала с фотоприемника, преобразуют стабилизированный сигнал в сигнал, величина первой гармоники огибающей которого пропорциональна величине углового отклонения Δ объекта слежения от визирной оси ОЭСС в соответствии с кодом величины Δ в сигнале с фотоприемника, выделяют огибающую преобразованного сигнала и затем ее первую гармонику, действующую в требуемой полосе частот и поступающую на исполнительный элемент ОЭСС. Особенностью способа, отличающей его от известного, принятого за прототип, является то, что сигнал с фотоприемника преобразуют в дополнительный сигнал управления для ближней к объекту слежения зоны, стабилизируя величину сигнала. В соответствии с изменившимся кодом величины Δ выделяют первую гармонику сигнала, измеряют среднее значение Uср сигнала с фотоприемника, сравнивают величину Uср с величиной порога U0, установленного в начале сближения, и при условии Uср>U0 подают на исполнительный элемент ОЭСС сформированный сигнал управления.
В предложенном способе формирования из сигнала фотоприемника сигнала управления ИЭ ОЭСС новым является определение величины порога U0, с помощью которого становится возможным в нужный момент времени перевести ОЭСС на режим работы в ближней зоне (БЗ). Как следует из рассмотрения фиг. 4, при сближении с объектом в ОЭСС с вращающимся АИ вблизи центра поля зрения автоматически формируется зона, в которой угловое отклонение Δ кодируется, как и в ОЭСС с полудисковым модулятором, причем эта зона по мере сближения расширяется в связи с ростом углового размера изображения объекта. Вместе с увеличением углового размера растет и воспринимаемая ОЭСС мощность излучения объекта. Очевидно, что условием работоспособности ОЭСС является обеспечение требований к характеристике Асу (Δ) (ее крутизне и максимальному значению). Очевидно также, что возможность формирования такой характеристики появляется, начиная с определенного расстояния до объекта, когда размер его изображения достигнет определенной величины. При заданных линейных размерах объекта и его температуре о величине его изображения можно судить по величине среднего значения Uср сигнала с ФП, пропорционального воспринимаемой ОЭСС мощности излучения. В соответствии с предложенным способом формирование дополнительного сигнала управления Асу осуществляется аналогично способу, выбранному в качестве прототипа, но уже на основании изменившегося в БЗ кода углового отклонения Δ центра излучателя от визирной оси ОЭСС, исключая операцию выделения огибающей сигнала, в которой нет необходимости. При этом стабилизацию крутизны характеристики Асу (Δ) осуществляют, формируя сигнал, пропорциональный отношению сигнала с ФП к величине Uср. Затем при выполнении условия Uср ≥ U0, что также является вновь введенным признаком, характеризующим время работы в БЗ, на ИЭ ОЭСС подается дополнительный сигнал управления. Очевидно, что стабилизация крутизны характеристики Асу (Δ) путем формирования сигнала, пропорционального величине отношения сигнала с ФП к его среднему значению возможна, если Uср определяется главным образом величиной принимаемой мощности излучения объекта, а не уровнем питания ФП или величиной фоновой засветки. Поэтому стабилизация крутизны подобным образом реализуется в ОЭСС при использовании в качестве ФП фотодиода и только в ближней к объекту зоне.
Практическое использование предлагаемого способа основывается на следующем.
1. Объект, с которым происходит сближение, относится к определенному классу (например, средние и легкие летательные аппараты (ЛА) с реактивными двигателями). При этом оказываются известными диапазоны линейных размеров и температур излучателя (основную долю излучения объекта составляют излучения сопла авиадвигателя, а при его экранировании элементами конструкции - излучение газового факела). Для одного из класса объектов (например, среднего по величине излучения) рассчитывается и экспериментально уточняется значение порога U0. Очевидно, что если излучение объекта больше или меньше среднего, то переход на работу в ближней зоне произойдет соответственно на большем или меньшем расстоянии до объекта.
2. В процессе сближения угловая скорость линии визирования (ЛВ) сводится к нулю, и угловое рассогласование ЛВ с визирной осью и ОЭСС также близко к нулю. Поэтому относительно малая величина линейной зоны характеристики Асу (Δ) не столь критична. Следовательно, не столь критично расстояние до объекта, на котором необходимо осуществить переход на режим работы в ближней зоне. В дальнейшем при сближении зона линейности увеличивается.
3. Способ применим и при работе по объектам, не относящимся к оцениваемому классу, практически за исключением высокотемпературных, для которых значение порога U0 должно быть повышено. Но при этом ОЭСС, реализующая способ, должна быть снабжена устройством, классифицирующим по сигналам объекты излучения на "точечные" и "размерные" или/и на "высокотемпературные" и с другой температурой излучения. По командам классификатора могут быть выполнены в ОЭСС необходимые переключения.
Предложенный способ может быть реализован в устройстве, функциональная схема которого изображена на фиг. 12.
На схеме введены следующие обозначения:
1 - масштабный усилитель,
2 - канал дальней зоны (ДЗ),
3 - измеритель среднего значения сигнала,
4 - переключатель,
5 - схема сравнения,
6 - фазовращатель,
7 - регулируемый усилитель,
8 - избирательный усилитель.
В качестве фотоприемника в фотоприемном устройстве (ФПУ) в ОЭСС должен быть использован фотодиод в фотовольтаическом режиме с тем, чтобы среднее значение выходного сигнала ФПУ определялось уровнем "засветки" ФП.
Сигнал с ФПУ поступает на две параллельно работающие цепи - каналы дальней и ближней зоны (ДЗ и БЗ), выходы которых связаны с переключателем 4, управляемым сигналом, формируемым в канале ближней зоны. Канал дальней зоны, как и в устройстве-прототипе, описанном в [3], состоит из последовательно соединенных блоков между выходом ФПУ и входом избирательного усилителя 8. На фиг. 12 это соединение блоков представлено в виде блока 2 преобразования сигнала в ДЗ. Его работа подробно описана в [3]. Канал БЗ состоит из последовательно соединенных масштабного усилителя 1, регулируемого усилителя (РУ) 7 и фазовращателя 6. Управляющий вход РУ 7 связан с измерителем 3 среднего значения сигнала, поступающего на его вход с масштабного усилителя 1. Выходной сигнал Uср измерителя среднего поступает также на схему сравнения 5, где сравнивается с величиной порога U0. При Uср < U0 на вход избирательного усилителя 8, пропускающего в требуемой полосе частот на исполнительный элемент сигнал на частоте вращения модулятора ОЭСС, подается выходной сигнал канала ДЗ. При Uср ≥ U0 к входу избирательного усилителя 8 вместо канала 2 ДЗ подключается канал БЗ. Масштабный усилитель 1 обеспечивает работу канала БЗ именно в ближней зоне, где сигнал на несколько порядков выше порогового значения сигнала в ДЗ. В измерителе 3 среднего значения сигнала реализуется зависимость
где T - интервал осреднения либо ее приближение в виде фильтра нижних частот (ФНЧ). В регулируемом усилителе 7 реализуется зависимость
где γ- масштабный коэффициент либо другая обеспечивающая уменьшение его коэффициента усиления с увеличением управляющего сигнала Uср. Фазовращатель 6 в канале 2 БЗ играет ту же роль, что и фазовращатель в канале ДЗ.
Таким образом, предложенный способ формирования сигнала управления ИЭ ОЭСС с модуляцией принимаемого излучения по сравнению с прототипом позволяет, стабилизируя коэффициент усиления, сформировать сигнал, обеспечивающий управление ИЭ в процессе слежения за объектами, находящимися как в дальней, так и в ближней зоне в соответствии с изменением кода угла рассогласования Δ в сигнале с ФП.
Источники информации
1. Справочник по приборам инфракрасной техники/Под редакцией Л.З. Криксунова. -К.: Техника, 1980, с. 140-142.
2. Справочник по приборам инфракрасной техники/Под редакцией Л.З. Криксунова. -К.: Техника, 1980, с. 96-98.
3. Патент РФ N 2093850, кл. G 01 S 3/78, опубл. 20.10.97 - прототип.
4. Мирошников M.M. Теоретические основы оптико-электронных приборов. - Л.: Машиностроение, Ленинградское отделение, 1977, с. 420.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ ИСПОЛНИТЕЛЬНЫМ ЭЛЕМЕНТОМ ОПТИКО-ЭЛЕКТРОННОЙ СЛЕДЯЩЕЙ СИСТЕМЫ | 2003 |
|
RU2265863C2 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ ИСПОЛНИТЕЛЬНЫМ ЭЛЕМЕНТОМ ОПТИКО-ЭЛЕКТРОННОЙ СЛЕДЯЩЕЙ СИСТЕМЫ | 2006 |
|
RU2319163C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ ИСПОЛНИТЕЛЬНЫМ ЭЛЕМЕНТОМ ОПТИКО-ЭЛЕКТРОННОЙ СЛЕДЯЩЕЙ СИСТЕМЫ | 2008 |
|
RU2371732C1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ ИСПОЛНИТЕЛЬНЫМ ЭЛЕМЕНТОМ ОПТИКО-ЭЛЕКТРОННЫХ СЛЕДЯЩИХ СИСТЕМ | 1995 |
|
RU2093850C1 |
| ИМИТАТОР ИСТОЧНИКА ОПТИЧЕСКОГО ИЗЛУЧЕНИЯ | 1994 |
|
RU2077705C1 |
| СПОСОБ ОБРАБОТКИ СИГНАЛА КОЛЬЦЕВОГО ИНТЕРФЕРОМЕТРА ВОЛОКОННО-ОПТИЧЕСКОГО ГИРОСКОПА С ОТКРЫТЫМ КОНТУРОМ | 2000 |
|
RU2176775C1 |
| СПОСОБ ОБРАБОТКИ СИГНАЛА КОЛЬЦЕВОГО ИНТЕРФЕРОМЕТРА ВОЛОКОННО-ОПТИЧЕСКОГО ГИРОСКОПА | 2001 |
|
RU2194246C1 |
| СПОСОБ ОБРАБОТКИ ИНФОРМАЦИИ ВОЛОКОННО-ОПТИЧЕСКОГО ГИРОСКОПА | 1999 |
|
RU2160886C1 |
| СПОСОБ УПРАВЛЕНИЯ ДАТЧИКОМ ИНФРАКРАСНОЙ ВЕРТИКАЛИ С АВТОПОДСТРОЙКОЙ УГЛА КРУГОВОГО СКАНИРОВАНИЯ | 2023 |
|
RU2814307C1 |
| СПОСОБ И УСТРОЙСТВО ИЗМЕРЕНИЯ УГЛОВОЙ ВЫСОТЫ ОБЪЕКТА ПОИСКА В ОБЗОРНЫХ НЕЛИНЕЙНЫХ РАДИОЛОКАТОРАХ | 2013 |
|
RU2530542C1 |
Использование: в следящих координаторах с модуляцией принимаемого излучения. Сущность: способ основан на оптимизации отношений сигнал/помеха и сигнал/шум в дальней от объекта слежения зоне, стабилизации величины сигнала с фотоприемника, преобразовании стабилизированного сигнала в сигнал, величина первой гармоники огибающей которого пропорциональна величине углового отклонения Δ объекта слежения от визирной оси ОЭСС в соответствии с кодом величины Δ в сигнале с фотоприемника, выделении огибающей преобразованного сигнала и затем ее первой гармоники, действующей в требуемой полосе частот и поступающей на исполнительный элемент ОЭСС. Новым является преобразование сигнала с фотоприемника в дополнительный сигнал управления для ближней к объекту слежения зоны, стабилизируя величину сигнала, выделение первой гармоники сигнала в соответствии с изменившимся кодом величины Δ, измерение среднего значения Uср сигнала с фотоприемника, сравнение величины Uср с величиной порога Uо, установленного в начале сближения, и подача на исполнительный элемент ОЭСС сформированного сигнала управления при условии Uср>Uо. Достигаемым техническим результатом является обеспечение работоспособности следящей системы как в ближней, так и в дальней зоне. 12 ил.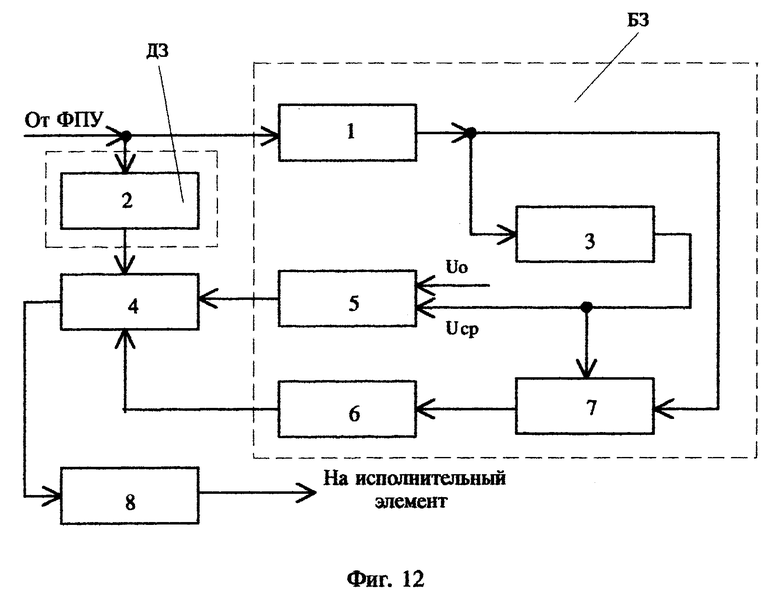
Способ формирования из сигнала фотоприемника сигнала управления исполнительным элементом оптико-электронных следящих систем (ОЭСС), основанный на оптимизации отношений сигнал/помеха и сигнал/шум в дальней от объекта слежения зоне, стабилизации величины сигнала с фотоприемника, преобразовании стабилизированного сигнала в сигнал, величина первой гармоники огибающей которого пропорциональна величине углового отклонения Δ объекта слежения от визирной оси ОЭСС в соответствии с кодом величины Δ в сигнале с фотоприемника, выделении огибающей преобразованного сигнала и затем ее первой гармоники, действующей в требуемой полосе частот и поступающей на исполнительный элемент ОЭСС, отличающийся тем, что сигнал с фотоприемника преобразуют в дополнительный сигнал управления для ближней к объекту слежения зоны, стабилизируя величину сигнала, в соответствии с изменившимся кодом величины Δ выделяют первую гармонику сигнала, измеряют среднее значение Ucp сигнала с фотоприемника, сравнивают величину Uср c величиной порога Uo, установленного в начале сближения, и при условии Ucp > Uo, подают на исполнительный элемент ОЭСС сформированный сигнал управления.
| УСТРОЙСТВО ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ ИСПОЛНИТЕЛЬНЫМ ЭЛЕМЕНТОМ ОПТИКО-ЭЛЕКТРОННЫХ СЛЕДЯЩИХ СИСТЕМ | 1995 |
|
RU2093850C1 |
| US 3657548, 18.04.1972 | |||
| US 5297762 A, 29.03.1994 | |||
| Аппарат для отжима и сушки пряжи на бобинах | 1960 |
|
SU139292A1 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ СИГНАЛОВ ИМПУЛЬСНОГО КООРДИНАТНОГО ДАТЧИКА | 1996 |
|
RU2103704C1 |

