Изобретение относится к аэрокосмической технике и предназначено для управления датчиком инфракрасной вертикали (ИКВ) Земли с автоподстройкой угла кругового сканирования для определения углового отклонения преимущественно космического аппарата (КА) от направления на Землю.
Известен способ управления по патенту РФ 2568235, основанный на передаче вычисляемой в БЦВК последней ступени ракеты-носителя (РН), основанный на передаче вычисляемой в БЦВК последней ступени ракеты-носителя (РН) системы координат в систему управления движением (СУД) КА. В этом способе управления для сокращения времени этапа построения начальной орбитальной ориентации сразу после выведения и отделения корабля от РН применяется алгоритм ускоренного построения орбитальной системы координат (ОСК). Для оценки углов ориентации связанного базиса космического аппарата относительно орбитального в данном алгоритме используются априорная информация об ориентации РН в момент разделения, а также измерения угловой скорости, полученные через несколько минут после разделения. Данный способ обеспечивает построение начальной ориентации К А на Землю, с ограниченной точностью ориентации в ОСК по прогнозу, абсолютная ошибка прогноза ОСК составляет 5-9 градусов. Недостатком этого способа является низкая точность ориентации.
Известен способ управления ориентацией, в котором после отделения от последней ступени ракеты-носителя для определения ориентации используется датчик инфракрасной вертикали кругового сканирования (Легостаев В.П., Микрин Е.А., Орловский И.В., Борисенко Ю.Н., Платонов В.Н., Евдокимов С.Н. Создание и развитие систем управления движением космических кораблей «Союз» и «Прогресс»: опыт эксплуатации, планируемая модернизация // Сборник статей. Москва, МФТИ, 2009). В этом способе после поступления первых измерений угловой скорости через интервал времени Δt к КА прикладывают серию импульсов, совершающих ряд последовательных разворотов для обеспечения нахождения диска Земли в поле зрения датчика ИКВ. Затем, уже по измерениям углов тангажа, крена датчиком ИКВ, к КА прикладывают серию импульсов, совмещающих видимый центр Земли с центром обзора датчика ИКВ. Далее, по изменению компонент угловой скорости в плоскости, перпендикулярной направлению на центр Земли, определяют текущее направление орбитальной угловой скорости и, соответственно, орбитальную систему координат (ОСК), описанную в Аппазов Р.Ф., Сытин О.Г. «Методы проектирования траекторий носителей и спутников Земли», Москва, Наука, 1987, после чего прикладывают серию импульсов для разворота К А в требуемую ориентацию.
Основными недостатками этого способа являются требование обеспечения определенных светотеневых условий на орбите и продолжительное (10-20 минут) время, затрачиваемое на поиск Земли.
Наиболее близким по технической сущности к предлагаемому (прототипом) является способ управления датчиком ИКВ с автоподстройкой угла кругового сканирования, изложенный в источнике: https://misha-smiryagin.livejournal.com/660.html?utm_source=3userpost, включающий реверсивный поворот пирамиды зеркал при отсутствии излучения от Земли в поле обзора датчика ИКВ последовательно до максимального и минимального значения угла сканирования, изменение значения угла сканирования пирамиды зеркал датчика ИКВ до максимального значения после достижения минимального значения угла сканирования, формирование сигнала отклонения оси визирования датчика инфракрасной вертикали от направления местной вертикали Земли, поворот датчика до совмещения оси визирования датчика с направлением местной вертикали Земли, после совмещения оси визирования датчика инфракрасной вертикали Земли с местной вертикалью измерение и сравнение углового размера видимого диска Земли с текущим углом сканирования пирамиды зеркал, поворот пирамиды зеркал до совмещения углового положения пирамиды зеркал с текущим угловым размером видимого диска Земли, поворот датчик инфракрасной вертикали Земли вокруг оси визирования, ориентированной по местной вертикали Земли, до совмещения связанной с датчиком оси тангажа с нормалью к плоскости к орбите, совпадающей с вектором орбитальной угловой скорости в орбитальной системе координат.
В качестве пояснения отметим, что в способе-прототипе информация о высоте полета КА формируется и из модулированного по частоте сигнала на выходе приемника излучения- болометра. Для этого все секции пирамиды зеркал, принимающих ИК излучение от Земли, смещают относительно друг друга на постоянный по величине угол. За счет указанного смещения сканирование осуществляется по ступенчатой траектории. Амплитуда модулированной таким образом гармоники будет содержать информацию об изменении высоты полета. Если конус сканирования занимает оптимальное рабочее положение по ИК горизонту для одних секций входных зеркал, другие же секции будут сдвинуты относительно первых, образуя ступенчатую траекторию угла сканирования. При такой высоте ИК горизонта разница в интенсивности ИК излучения, воспринимаемого приемником от разных секций, будет иметь строго определенное значение (обычно близкое к максимальному). При изменении высоты полета эта величина также изменится. Управляя величиной угла конуса сканирования можно опять добиться максимальной (расчетной) разности. Но, необходимо отметить, что подстройку по высоте можно выполнять только после поворота датчика ИКВ до совмещения оси визирования датчика ИКВ с местной ИК вертикалью Земли с точностью порядка от одного до трех градуса.
В результате автоподстройки по высоте полета обеспечиваются номинальные параметры выходных характеристик датчика ИКВ (крутизна выходной характеристики, отсутствие зоны нечувствительности и т.п.). Основными недостатками этого способа являются необходимость обеспечения определенных светотеневых условий на орбите. Кроме того, автоподстройка угла сканирования к угловому размеру Земли осуществляется с использованием информации об угловом рассогласовании путем формирования амплитуды сигнала четвертой гармоники, выделяемого из переменного сигнала на выходе болометрического приемника ИК излучения при сканировании пространства по ступенчатой траектории, формируемой круговым ступенчатым расположением зеркал датчика ИКВ. При этом, в силу симметрии выходной характеристика сигнала четвертой гармоники, автоподстройка угла сканирования может завершиться в так называемом «ложном устойчивом положении» с дальнейшей при изменении высоты орбиты повторной автоподстройкой в «истинное» устойчивое положение, что приводит к повышенным колебательности процесса ориентации КА и расхода рабочего тела.
Техническим результатом предлагаемого изобретения является сокращение продолжительности управления ИКВ для настройки выходных характеристик датчика к номинальным значениям путем изменения угла сканирования пирамиды зеркал до совмещения угла сканирования с угловым размером Земли и, как следствие, сокращение расхода рабочего тела и длительности построения трехосной ориентации на Землю.
Технический результат достигается тем, что в способе управления датчиком ИКВ с автоподстройкой угла кругового сканирования, включающем реверсивный поворот пирамиды зеркал при отсутствии излучения от Земли в поле обзора датчика ИКВ последовательно до максимального и минимального значения угла сканирования, изменение значения угла сканирования пирамиды зеркал датчика ИКВ до максимального значения после достижения минимального значения угла сканирования, формирование сигнала отклонения оси визирования датчика инфракрасной вертикали от направления местной вертикали Земли, поворот датчика до совмещения оси визирования датчика с направлением местной вертикали Земли, после совмещения оси визирования датчика инфракрасной вертикали Земли с местной вертикалью измерение и сравнение углового размера видимого диска Земли с текущим углом сканирования пирамиды зеркал, поворот пирамиды зеркал до совмещения углового положения пирамиды зеркал с текущим угловым размером видимого диска Земли, поворот датчик инфракрасной вертикали Земли вокруг оси визирования, ориентированной по местной вертикали Земли, до совмещения связанной с датчиком оси тангажа с нормалью к плоскости к орбите, совпадающей с вектором орбитальной угловой скорости в орбитальной системе координат, в отличие от известного, сравнивают сигнал отклонения оси визирования датчика инфракрасной вертикали от направления местной вертикали Земли с пороговым уровнем больше нуля, но меньше максимального сигнала датчика инфракрасной вертикали при нахождении излучения от Земли в поле обзора датчика, осуществляют поворот пирамиды зеркал в исходное угловое положение, соответствующее максимальному значению угла сканирования, с последующим остановом, при этом, поворот пирамиды зеркал в исходное угловое положение, выполняют после превышения сигналом отклонения порогового, а совмещение оси визирования датчика с направлением местной вертикали Земли и углового положения пирамиды зеркал с текущим угловым размером видимого диска Земли выполняют после останова в исходном максимальном угловом положении пирамиды зеркал.
В результате предлагаемый способ управления гарантированно выполняет автоподстройку угла сканирования за счет изменения угла сканирования из исходного положения, соответствующего максимальному значению угла сканирования и исключает завершение автоподстройки при значении угла сканирования, соответствующему «ложному» завершения автоподстройки.
Сущность изобретения поясняется иллюстрациями на фиг.1-6.
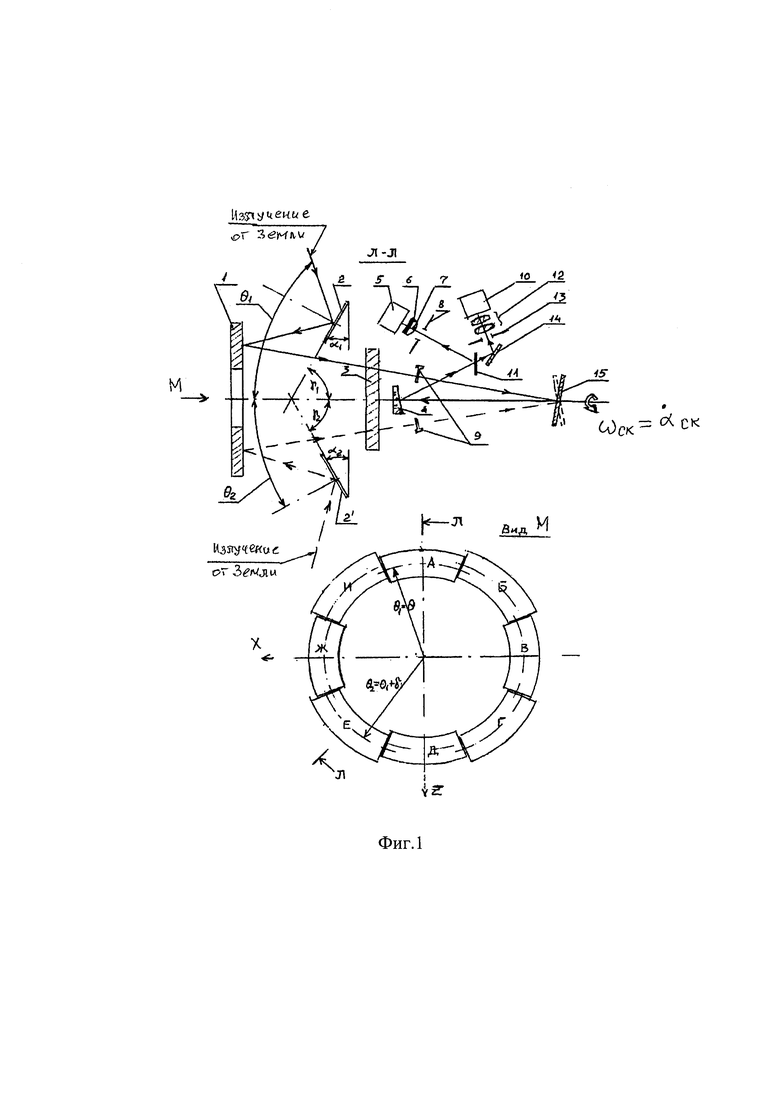
На фиг.1 приведена упрощенная оптическая схема датчика ИКВ кругового сканирования с автоподстройкой угла сканирования.
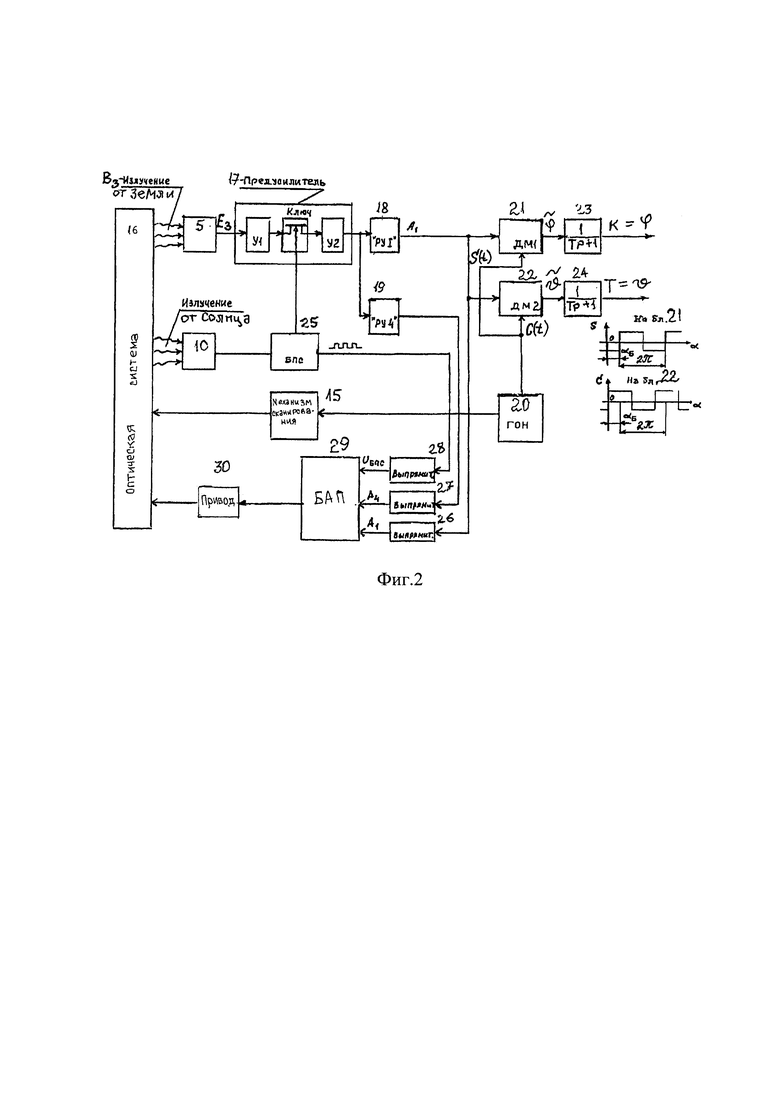
На фиг.2 приведена блок-схема схема датчика ИКВ кругового сканирования с автоподстройкой угла сканирования.
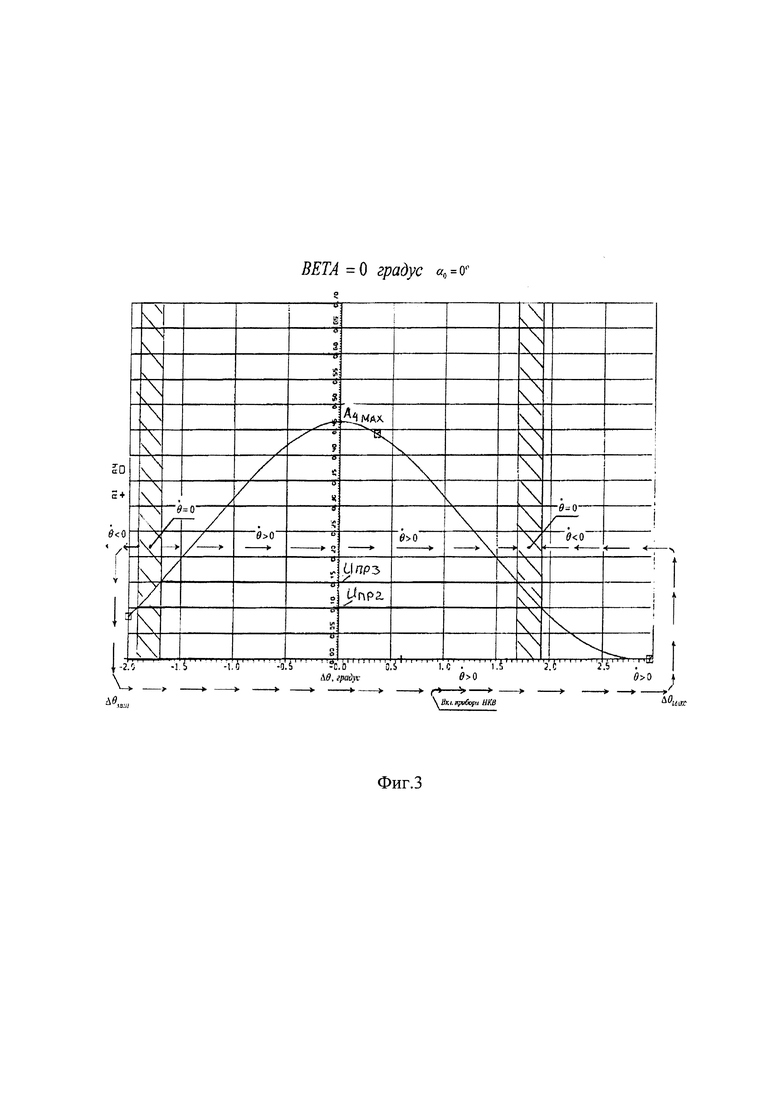
На фиг.3 приведено пояснение логики работы Блока автоподстройки угла сканирования при близком к нулевому угловому отклонению оси визирования прибора ИКВ «Beta» от ИК вертикали Земли
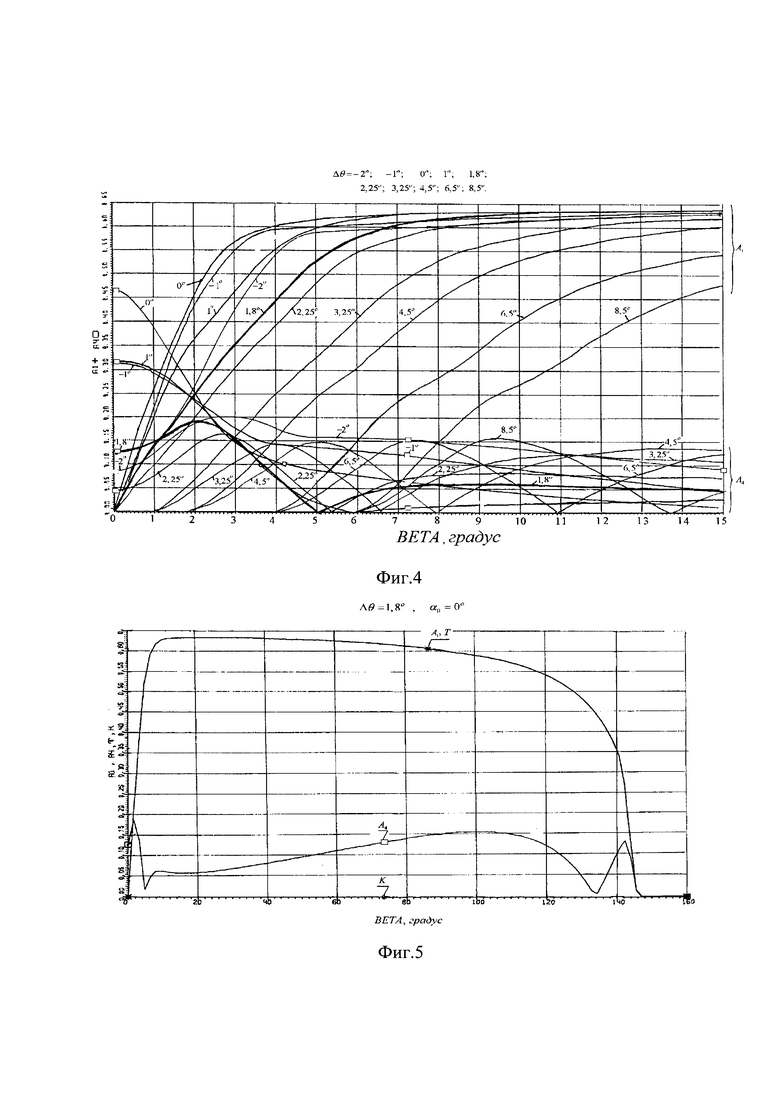
На фиг.4 приведены выходные характеристики прибора ИКВ кругового сканирования при различных значениях угла сканирования
На фиг.5 приведены выходная характеристика прибора ИКВ кругового сканирования после завершения автоподстройки угла сканирования.
На фиг.6 приведена циклограмма формирования измерительных сигналов датчика ИКВ, на выходах блоков, приведенных на фиг.1, 2.
На фиг.1, 2 обозначены: 1 - зеркало, 2 - зеркало пирамиды 3 - защитное окно, 4 - объектив, 5 - болометр, 6 - фильтр, 7 - конденсор, 8 - диафрагма, 9 - ИК-излучатели (для автономных проверок), 10 - фотосопротивление (ФС), 11 - полупрозрачное зеркало, 12 - конденсор, 13 - полевая диафрагма, 14 - зеркало, 15 - сканирующее зеркало с механизмом сканирования, 16 - оптическая система, 17 -предусилитель с последовательно соединенными первым У1 усилителем, Ключом и вторым У2 усилителем, 18 - резонансный усилитель сигнала первой гармоники РУ1, 19 - резонансный усилитель сигнала четвертой гармоники РУ4,20 - генератор опорного напряжения ГОН, 21 - первый демодулятор ДМ1 (канал «К» крена) 22 - второй демодулятор ДМ2 (канал «Т» тангажа), 23 -первый фильтр (канал «К» крена), 24 - второй фильтр (канал «Т» тангажа), 25 -усилитель сигнала блока подавления Солнца (БПС), 26 - выпрямитель сигнала А1 амплитуды первой гармоники, 27 - выпрямитель сигнала А4 амплитуды четвертой гармоники, 28 - выпрямитель сигнала БПС, 29 - блок автоподстройки угла сканирования (БАЛ), 30 - привод поворота пирамиды зеркал, «Л-Л» вид на оптико-механическую систему датчика ИКВ по сечению «Л-Л», «М» - обозначения вида со стороны оптического входа излучения от Земли на зеркала пирамиды 2,2' датчика ИКВ.
На фиг.6 обозначены:
t - время.
 - фазовый сдвиг (постоянная времени болометра) из-за инерционности болометра 5 в секундах,
- фазовый сдвиг (постоянная времени болометра) из-за инерционности болометра 5 в секундах,  - период кругового сканирования в секундах,
- период кругового сканирования в секундах,  - фазовый сдвиг сигнала на выходе болометра 5 в радианах.
- фазовый сдвиг сигнала на выходе болометра 5 в радианах.
 - модулированное излучение Земли на входе болометра 5.
- модулированное излучение Земли на входе болометра 5.
 - сигнал на выходе болометра 5 (фазовое смещение - запаздывание относительно Е3(t) за счет постоянной времени
- сигнал на выходе болометра 5 (фазовое смещение - запаздывание относительно Е3(t) за счет постоянной времени  болометра.
болометра.
S(t) - прямоугольный синус от ГОН 20.
С (t) - прямоугольный косинус от ГОН 20.
А (t) - сигнал первой гармоники на выходе усилителя 18 первой гармоники (разложение в ряд Фурье на частоте сканирования 20 Гц)
На выходе первого демодулятора (ДМ) 21 формируется сигнал в виде произведения  .
.
На выходе первого фильтра 23, формируется сигнал крена  из сигнала на выходе первого ДМ 21
из сигнала на выходе первого ДМ 21 
На выходе второго демодулятора 22 формируется из сигнала в виде произведения
На выходе второго фильтра 24, формируется сигнал тангажа βn = ϑ из сигнала на выходе второго ДМ 22 
Излучение от Земли В3 попадает на зеркала 2,2' пирамиды и направляется через зеркало 1, через защитное окно 3, на сканирующее зеркало 15 оптико-механической системы, далее через объектив 4 полупрозрачное зеркало 11, зеркало 14, полевую диафрагму 13, конденсор 13 поступает на вход фотосопротивления (ФС) 10 для формирования сигнала блока подавления Солнца (БПС) при засветке Солнцем. Полупрозрачное зеркало 11 перенаправляет излучение от Земли через диафрагму 8, конденсор 7 на болометр 5, формирующий переменный сигнал от излучения от Земли. Для автономных проверок датчика ИКВ предусмотрены инфракрасные (ИК) излучатели 9.
Сканирование пространства осуществляется оптико-механической системой с помощью вращающегося сканирующего зеркала 15 с частотой 20 Гц (частота первой гармоники) таким образом, что центральный луч поля зрения описывает ступенчатую траекторий, состоящую из чередующихся участков двух соосных конусов:
- внутреннего с углом при вершине 2⋅θ = 2⋅θ1,
- внешнего с углом при вершине 2⋅θ2=2⋅(θ+δ), где δ = 2 градуса.
В процессе сканирования обеспечивается перемещение центрального луча мгновенного поля зрения (МПЗ) по образующей ступенчатого конуса с углом при вершине сканирования 2⋅θ и 2⋅(θ+δ) благодаря специальной установке пирамиды зеркал 2 и 2' с угловым смещением относительно друг друга на γ2-γ1=1°.
Ступенчатое сканирование в датчике ИКВ введено для модулирования ИК излучения и от Земли и последующего формирования сигнала четвертой гармоники с частотой 80 Гц, используемого для автоматической настройки угла сканирования, и обеспечивается установкой зеркал пирамиды Б, Г, Е, И относительно зеркал А, В, Д, Ж так, что γ2 - γ1 =1°. Этим достигается
разность между конусами сканирования δ = θ2 - θ1 = 2° (см. ход луча на входе пирамиды зеркал 2 и 2' на фиг.2).
Траектория сканирования МПЗ на картинной плоскости представляет собой (фиг.1) ступенчатую траекторию АБВГЕДЖИ. В качестве примера величины углов сканирования и установки зеркал.
Зеркала А, В, Д, Ж:

Зеркала Б, Г, Е, И:
Входное ИК излучение от Земли В3 поступает в оптическую систему 16 (фиг.1, 2). Модулированное (переменное) входное ИК излучение преобразуется болометром 5 в переменный электрический сигнал Е3, смещенный из-за инерционностью болометрического тракта по фазе по отношению к модулированному потоку на величину ϕБ (фиг.6). Сигнал с болометра 5 поступает в предусилитель 17, где происходит выделение переменного сигнала (постоянная составляющая фильтруется) и его усиление. Далее сигнал поступает на вход резонансного усилителя (РУ1) первой гармоники 18, настроенного на 20±2 Гц и на вход РУ4 четвертой гармоники 19, настроенного на 80±4 Гц, где выделяются и усиливаются переменные составляющие напряжений первой А1 и четвертой А4 гармоник. РУ4 четвертой гармоники выполнен по аналогии с РУ1 первой гармоники.
Генератор опорных импульсов (ГОН) 20 формирует сигналы прямоугольного синуса S(t) и косинуса C(t) (фиг.2, 6), которые поступают на входы демодуляторов 21 и 22, а также задает частоту вращения 20 Гц механизма сканирования 15.
Напряжение первой гармоники с выхода РУ1 18 первой гармоники подается на демодуляторы (ДМ) 21 и 22, которые раскладывают напряжение первой гармоники на составляющие по каналам крена «К» - канал «X» и тангажа «Т» - канал поворот вокруг оси «Z» (фиг.2, 6) путем умножения сигнала первой гармоники на сигналы прямоугольного синуса S(t) и косинуса С(t) с выхода генератора опорных напряжений (ГОН) 20. Опорные импульсы S(t), подаваемые с выходов ГОН на вход ДМ 21, сдвинуты на 90° относительно C(t) подаваемых на вход ДМ 22.
Сигналы с выходов ДМ 21 и 22 сглаживаются апериодическими фильтрами 23 и 24, выходы которых «К» и «Т» являются выходами прибора, постоянная времени фильтров 23 и 24 
При засветке Солнцем в усилителе БПС 25 вырабатывается сигнал БПС, по которому в предусилителе 17 может выполняться обнуление сигнала от момента засветки в течении времени  или на весь период
или на весь период  засветки (обнуление выходного сигнала датчика ИКВ).
засветки (обнуление выходного сигнала датчика ИКВ).
В датчике ИКВ кругового сканирования предусматривается автоподстройка угла сканирования в зависимости от высоты орбитального полета. Для определения характеристик прибора ИКВ при автоподстройке в дальнейшем будем использовать понятие относительного угла сканирования, который определим следующим выражением:
где ϕ3, ϕA - угловые радиусы Земли и модели края атмосферы на высоте 40 км (так называемая, модель А излучения Земли).
Удобство использования относительного угла сканирования заключается в том, что в пределах изменения высоты полета КА от 180 до 500 км после завершения автоподстройки его значение приблизительно составляет одно и то же значение, расчетное значение 
Автоподстройка угла сканирования пирамиды зеркал осуществляется Блоком автоподстройки (БАП) 29 (фиг.2) по сигналу А4 четвертой гармоники до достижения относительным углом сканирования расчетного значения  (достижения углом сканирования величины, примерно равной угловому размеру Земли). Процесс автоподстройки угла сканирования пирамиды зеркал датчика ИКВ иллюстрируется на фиг.3, где числовые значения выходных сигналов первой А1 и четвертой гармоник А4 приведены в относительных единицах (отн.ед.), причем 0,15 отн.ед. = 0,4 В, что соответствует отклонению оси визирования датчика ИКВ (сигнал А1) от ИК вертикали Земли на величину 1 градус.
(достижения углом сканирования величины, примерно равной угловому размеру Земли). Процесс автоподстройки угла сканирования пирамиды зеркал датчика ИКВ иллюстрируется на фиг.3, где числовые значения выходных сигналов первой А1 и четвертой гармоник А4 приведены в относительных единицах (отн.ед.), причем 0,15 отн.ед. = 0,4 В, что соответствует отклонению оси визирования датчика ИКВ (сигнал А1) от ИК вертикали Земли на величину 1 градус.
После включения питания датчика ИКВ БАП 29 с помощью привода 30 поворачивает призму зеркал в исходное положение - фиксированное угловое положение пирамиды с максимальным углом сканирования (см. фиг.3, где стрелками указывается направление изменения относительного угла автоподстройки пирамиды зеркал) примерно равного угловому размеру Земли на высоте орбиты 160 км. Одновременно поворачивают датчик ИКВ путем разворота КА и контролируют попадание излучения Земли в поле обзора датчика.
При отсутствии запретов автоподстройки (отсутствие засветки датчика ИКВ Солнцем - запрет автоподстройки при засветке Солнцем и по сигналу первой гармоники А1 - при угловом отклонении оси визирования датчика ИКВ от местной ИК вертикали Земли не более заданного - сигнал А1 меньше заданного, например меньше 1 градуса (меньше 0,4 В), БАП поворачивает пирамиду зеркал в направлении уменьшения угла сканирования до достижения амплитудой сигнала четвертой гармоники порогового значения (на фиг.3 заштрихованная область справа), которое соответствует расчетному значению угла сканирования после завершения автоподстройки в пределах от  , где
, где

В процессе автоподстройки изменяется (фиг.4, 5) крутизна выходной характеристики, появляется зона нечувствительности до 6 градусов. После завершения автоподстройки крутизна составляет 0,4 В/градус, зона нечувствительности равна нулю.
Как видно из. фиг.3 зависимость амплитуды сигнала четвертой гармоники симметрична относительно нулевого значения относительного угла сканирования 
Заштрихованная область слева соответствует зоне завершения автоподстройки в «ложном» неустойчивом положении - так называемая «зона ложного завершения автоподстройки». Попадание в зону «ложного завершения автоподстройки» может реализоваться при следующих условиях. После включения прибора ИКВ и достижения максимального угла сканирования Земля отсутствует в поле зрения датчика ИКВ. БАП поворачивает пирамиду зеркал в направлении уменьшения угла сканирования. Если в момент достижения углом сканирования величины, соответствующей левой заштрихованной области (фиг.3), в поле обзора прибора ИКВ попадет Земля, сформируется запрет автоподстройки по сигналу первой гармоники А1 и автоподстройка угла сканирования останавливается. Далее после приведения оси визирования прибора ИКВ к ИК вертикали Земли формируется условие разрешения автоподстройки по первой гармонике (угловое отклонение меньше 0,4 В, что соответствует 60 угловым минутам). Но так как сигнал четвертой гармоники А4 находится в «ложной» зоне нечувствительности регулятора привода автоподстройки (левая заштрихованная часть на фиг.3), то автоподстройка не возобновляется. При создании условий, соответствующих выходу из зоны нечувствительности по сигналу А4, например, при изменении высоты полета КА, автоподстройка возобновляется и завершается при достижении правой области устойчивого завершения автоподстройки с обеспечением номинальных выходных характеристик датчика ИКВ (отсутствие зоны нечувствительности, расчетная крутизна выходной характеристики 0,4 В/градус, фиг 4, 5). При этом, в системе управления КА возможны переходные процессы с повышенной колебательностью, вызываемые изменением в процессе изменения угла сканирования выходной характеристики прибора ИКВ (уменьшение, увеличение крутизны, появление зоны нечувствительности, фиг.4).
Предлагаемый способ управления позволяет гарантированно избежать описанное выше завершение автоподстройки в зоне ложного завершения автоподстройки. Это достигается за счет того, что после попадания излучения Земли в поле обзора датчика ИКВ, например, путем выполнения начальной ориентации по патенту РФ 2568235 обеспечивающей точность ориентации датчика ИКВ относительно ОСК от 5 до 9 градусов, поворачивают датчик ИКВ в направлении уменьшения измеренного отклонения оси визирования ИКВ от местной вертикали Земли, сравнивают измеренные сигналы отклонения датчика ИКВ с пороговым уровнем больше нуля, но меньше максимального сигнала датчика ИКВ при нахождении излучения от Земли в поле обзора датчика и при превышении порогового уровня сравнивают сигнал отклонения оси визирования датчика инфракрасной вертикали от направления местной вертикали Земли с пороговым уровнем больше нуля, но меньше максимального сигнала датчика инфракрасной вертикали при нахождении излучения от Земли в поле обзора датчика, осуществляют поворот пирамиды зеркал в исходное угловое положение, соответствующее максимальному значению угла сканирования, с последующим остановом, при этом, поворот пирамиды зеркал в исходное угловое положение, выполняют после превышения сигналом отклонения порогового, а совмещение оси визирования датчика с направлением местной вертикали Земли и углового положения пирамиды зеркал с текущим угловым размером видимого диска Земли выполняют после останова в исходном максимальном угловом положении пирамиды зеркал.
В случае иного построения начальной ориентации на Землю, например, по патенту РФ №2021174, после попадания излучения Земли в поле обзора датчика ИКВ, поворачивают К А в направлении уменьшения измеренного отклонения оси визирования ИКВ от местной вертикали Земли, сравнивают сигналы углового отклонения датчика ИКВ с пороговым уровнем больше нуля, но меньше максимального сигнала датчика инфракрасной вертикали при нахождении излучения от Земли в поле обзора датчика, осуществляют поворот пирамиды зеркал в исходное угловое положение, соответствующее максимальному значению угла сканирования, с последующим остановом, при этом поворот пирамиды зеркал в исходное угловое положение выполняют после превышения сигналом отклонения порогового, а совмещение оси визирования датчика с направлением местной вертикали Земли и углового положения пирамиды зеркал с текущим угловым размером видимого диска Земли выполняют после останова в исходном максимальном угловом положении пирамиды зеркал.
Операцию поворот датчика ИКВ вокруг местной вертикали до совмещения связанной с датчиком и КА осью тангажа с нормалью к плоскости к орбите, совпадающей с вектором орбитальной угловой скорости реализуют путем измерения изменений компонент угловой скорости в плоскости, перпендикулярной направлению на центр Земли, определения текущего направления орбитальной угловой скорости и, соответственно, орбитальной системы координат (см. Аппазов Р.Ф., Сытин О.Г. «Методы проектирования траекторий носителей и спутников Земли», Москва, Наука, 1987), после чего прикладывают серию импульсов для разворота КА в требуемую ориентацию.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ДАТЧИКОМ ИНФРАКРАСНОЙ ВЕРТИКАЛИ ЗЕМЛИ С АВТОПОДСТРОЙКОЙ УГЛА КРУГОВОГО СКАНИРОВАНИЯ | 2023 |
|
RU2814305C1 |
| СПОСОБ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА НА ПЛАНЕТУ | 1991 |
|
RU2021173C1 |
| СПОСОБ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА ПО МЕСТНОЙ ВЕРТИКАЛИ ПЛАНЕТЫ | 1991 |
|
RU2021174C1 |
| АВТОНОМНАЯ БОРТОВАЯ СИСТЕМА УПРАВЛЕНИЯ КОСМИЧЕСКОГО АППАРАТА "ГАСАД" | 1993 |
|
RU2033949C1 |
| СПОСОБ УПРАВЛЕНИЯ ОРИЕНТАЦИЕЙ ГЕОСТАЦИОНАРНОГО КОСМИЧЕСКОГО АППАРАТА, ОСНАЩЕННОГО РАДИОМАЯКОМ | 2006 |
|
RU2354590C2 |
| ШИРОКОПОЛЬНАЯ ИНФРАКРАСНАЯ СИСТЕМА КРУГОВОГО ОБЗОРА | 2001 |
|
RU2189049C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ АСТРОИСТОЧНИКА, ПРЕИМУЩЕСТВЕННО ЗЕМЛИ И/ИЛИ СОЛНЦА | 1997 |
|
RU2131587C1 |
| ПРИБОР ПАНОРАМНЫЙ | 2018 |
|
RU2708535C1 |
| СЛЕДЯЩАЯ СИСТЕМА | 1993 |
|
RU2089856C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ АСТРОИСТОЧНИКА, ПРЕИМУЩЕСТВЕННО ЗЕМЛИ И/ИЛИ СОЛНЦА | 1997 |
|
RU2131586C1 |

Изобретение относится к области космической техники, в частности к управлению датчиком инфракрасной вертикали (ИКВ) Земли. Для управления датчиком ИКВ с автоподстройкой угла кругового сканирования изменяют угол сканирования из исходного положения, соответствующего максимальному значению угла сканирования, что исключает завершение автоподстройки при значении угла сканирования, соответствующем «ложному» завершению автоподстройки. Достигается сокращение продолжительности управления ИКВ для настройки выходных характеристик датчика. 6 ил.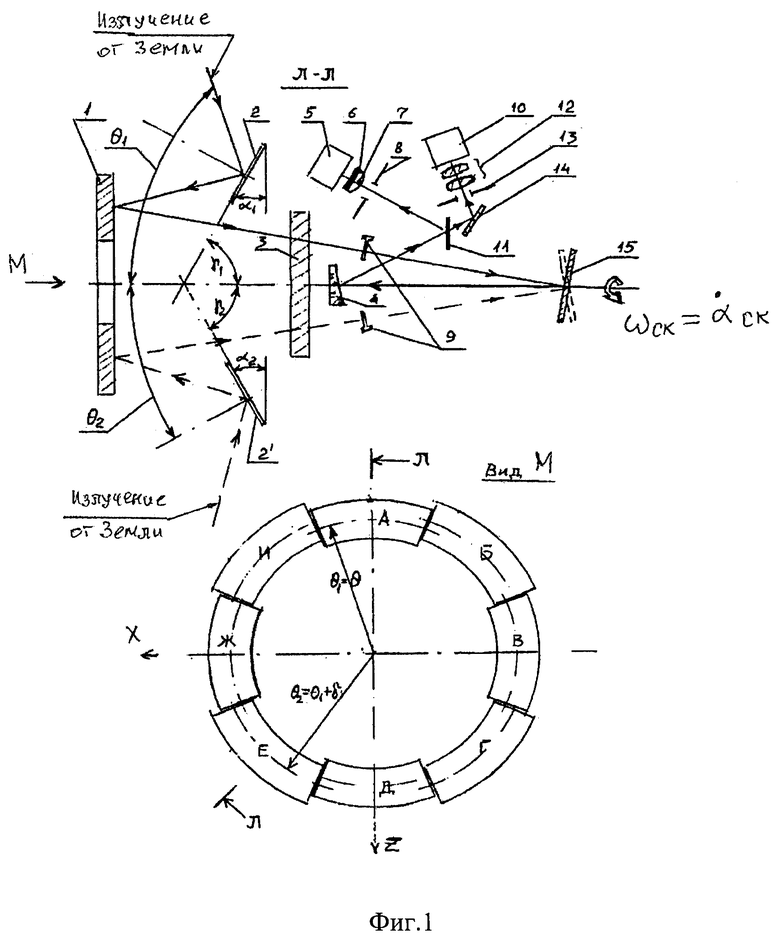
Способ управления датчиком инфракрасной вертикали с автоподстройкой угла кругового сканирования, включающий реверсивный поворот пирамиды зеркал при отсутствии излучения от Земли в поле обзора датчика инфракрасной вертикали последовательно до максимального и минимального значений угла сканирования, изменение значения угла сканирования пирамиды зеркал датчика инфракрасной вертикали до максимального значения после достижения минимального значения угла сканирования, формирование сигнала отклонения оси визирования датчика инфракрасной вертикали от направления местной вертикали Земли, поворот датчика до совмещения оси визирования датчика с направлением местной вертикали Земли, после совмещения оси визирования датчика инфракрасной вертикали Земли с местной вертикалью измерение и сравнение углового размера видимого диска Земли с текущим углом сканирования пирамиды зеркал, поворот пирамиды зеркал до совмещения углового положения пирамиды зеркал с текущим угловым размером видимого диска Земли, поворот датчика инфракрасной вертикали Земли вокруг оси визирования, ориентированной по местной вертикали Земли, до совмещения связанной с датчиком оси тангажа с нормалью к плоскости к орбите, совпадающей с вектором орбитальной угловой скорости в орбитальной системе координат, отличающийся тем, что сравнивают сигнал отклонения оси визирования датчика инфракрасной вертикали от направления местной вертикали Земли с пороговым уровнем больше нуля, но меньше максимального сигнала датчика инфракрасной вертикали при нахождении излучения от Земли в поле обзора датчика, осуществляют поворот пирамиды зеркал в исходное угловое положение, соответствующее максимальному значению угла сканирования, с последующим остановом, при этом поворот пирамиды зеркал в исходное угловое положение выполняют после превышения сигналом отклонения порогового, а совмещение оси визирования датчика с направлением местной вертикали Земли и углового положения пирамиды зеркал с текущим угловым размером видимого диска Земли выполняют после останова в исходном максимальном угловом положении пирамиды зеркал.
| СПОСОБ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА ПО МЕСТНОЙ ВЕРТИКАЛИ ПЛАНЕТЫ | 1991 |
|
RU2021174C1 |
| 0 |
|
SU185146A1 | |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА С УПРАВЛЯЕМОЙ ОРИЕНТАЦИЕЙ | 2017 |
|
RU2669481C1 |
| US 5783827 A1, 21.07.1998 | |||
| Антиструмогенное средство | 1971 |
|
SU493228A1 |
| CN 115384811 A, 25.11.2022. | |||
