Изобретение относится к области радиотехники, и в частности радионавигации с использованием сигналов навигационных спутниковых систем GPS и GLONASS.
Предлагаемые способ и устройство могут быть использованы в трактах первичной обработки информации приемоиндикаторов двух спутниковых радионавигационных систем GPS и GLONASS (СРНС).
Известны способы обработки радиосигналов навигационных спутников GPS и ГЛОНАСС, которые используют многоканальную систему обработки радиосигналов. Известны также аналоговые процессоры интегрированных приемников, работающие по сигналам двух спутниковых навигационных систем GPS (США) и GLONASS (РФ), строящиеся по многоканальной схеме. Аналоговые процессоры содержат, как минимум, два отдельных приемных тракта, имеющих несколько общих элементов лишь в синтезаторе гетеродинных частот.
Каждый из этих трактов включает свой входной фильтр-преселектор, малошумящий усилитель, один или несколько гетеродинов, один или несколько фильтров и усилителей промежуточных частот и аналого-цифровой преобразователь. Общим элементом этих приемных трактов является опорный кварцевый генератор, как, например, в [1].
Другой способ и вариант построения аналогового процессора (патент [2]) предполагает использование широкополосных входных цепей высокой частоты, пропускающих до смесителей полосу частот, охватывающую спектры сигналов обеих систем: GPS и GLONASS (1574,42-1621 МГц) с разделением на два идентичных приемных тракта, начиная со смесителей, преобразующих общий входной сигнал на две квадратурные компоненты за счет использования сигналов гетеродина, сдвинутых по фазе на 90o. Каждый из квадратурных каналов содержит далее свой фильтр, усилитель промежуточной частоты и аналого-цифровой преобразователь.
Известен также приемник [3], в котором аналоговый процессор содержит два раздельных приемных тракта сигналов GPS и GLONASS, и в каждом из них в аналоговой форме осуществляется расщепление сигналов на две квадратурные компоненты. Выходом этого приемника являются выходы четырех идентичных аналого-цифровых преобразователей.
Недостатком всех перечисленных приемников является их аппаратная избыточность, приводящая к ухудшению точностных характеристик, существенному усложнению и удорожанию аппаратуры потребителей в целом.
Требование повышения точностных характеристик приемника импульсных сигналов обусловливает применение широкополосных радиотрактов. Расширение полосы пропускания по высокой частоте до нескольких десятков мегагерц приводит к слиянию полос пропускания входных фильтров сигналов спутниковых систем GPS и GLONASS, что одновременно с улучшением точностных характеристик приемников по каждой из систем приведет к существенному упрощению интегрированного приемника за счет исключения дублирования приемных трактов.
Известен способ обработки радиосигналов навигационных спутников GPS и ГЛОНАСС, включающий операции широкополосной фильтрации, широкополосного усиления, преобразования частоты с использованием гетеродинной частоты, получаемой от синтезатора гетеродинной частоты, широкополосного усиления промежуточной частоты, аналого-цифрового преобразования сигналов с выхода широкополосного усилителя промежуточной частоты и цифровой обработки сигналов и устройство, содержащее антенну, принимающую сигналы навигационных спутниковых систем, широкополосный фильтр, широкополосный малошумящий усилитель, смеситель, синтезатор гетеродинной частоты, опорный генератор, аналого-цифровой преобразователь, выход которого является входом цифровой радиоприемной системы приемника. Известный способ и устройство реализованы в приемнике сигналов спутниковых радионавигационных систем [4], который является наиболее близким прототипом предлагаемому устройству.
Достоинство приемника [4] заключается в возможности работы с сигналами двух спутниковых радионавигационных систем - GPS и ГЛОНАСС. При этом обеспечивается достаточно высокая точность измерения навигационных параметров.
Однако устройство-прототип имеет ряд существенных недостатков.
в прототипе частота гетеродина расположена достаточно далеко слева от частоты несущей GPS, что обусловливает введение дополнительно второго малошумящего усилителя, первого и второго полосовых фильтров по промежуточным частотам, разных для GPS и ГЛОНАСС, блок автоматической регулировки усиления.
в прототипе используются раздельные фильтры промежуточных частот для сигналов спутников GPS и ГЛОНАСС, что существенно усложняет устройство.
Техническим результатом данного изобретения является предельное упрощение аналогового тракта совмещенного приемника двухспутниковых систем GPS и ГЛОНАСС.
Наряду с существенным упрощением всего тракта достигается максимально возможная широкополосность сквозного радиотракта, что в сочетании с известным методом строб-коррелятора снижает погрешность измерения псевдодальности, вызванные многолучевым распространением радиосигналов.
Сущность способа состоит в следующем.
Указанные преимущества перед прототипом достигаются за счет того, что в предлагаемом способе операцию преобразования частоты сигнала производят с использованием гетеродинной частоты, которая располагается между спектрами сигналов GPS и ГЛОНАСС и выбирается в соответствии с выражением
fHGPS < fГ < fНГЛОНАСС,
где fНGPS - несущая частота сигналов GPS NAVSTAR,
fГ - частота гетеродина,
fНГЛОНАСС - несущая частота наименьшего используемого литера в системе ГЛОНАСС,
при этом полоса пропускания видеоусилителя общая для сигналов обеих систем и никакой дополнительной селекции сигналов этих систем не требуется.
В аналоговый процессор приемника, содержащий антенну, принимающую сигналы навигационных спутниковых систем, широкополосный фильтр, широкополосный малошумящий усилитель, смеситель, синтезатор гетеродинной частоты, опорный генератор, аналого-цифровой преобразователь, выход которого является входом цифровой радиоприемной системы приемника, дополнительно введен видеоусилитель с ограниченной полосой пропускания, причем вход широкополосного фильтра соединен с выходом антенны, а выход с входом широкополосного малошумящего усилителя, выход которого подключен к первому входу смесителя, ко второму входу которого подсоединен выход синтезатора гетеродинной частоты, вход синтезатора гетеродинной частоты соединен с выходом опорного генератора, выход смесителя соединен со входом видеоусилителя с ограниченной полосой пропускания, выход которого является входом аналого-цифрового преобразователя, выходы которого являются входами цифровой радиоприемной системы, а последний вход подключен к выходу опорного генератора.
Именно такое взаимное расположение блоков и их взаимосвязи обеспечивают решение поставленных технических задач.
Однозначность слежения ФАПЧ несущих обеспечивается выбором номинала частоты гетеродина так, чтобы полоса промежуточных частот сигналов GPS с учетом максимально возможных значений доплеровского сдвига и расхождения частот генераторов спутника и приемника не перекрывалась с аналогичными полосами таких же (с учетом доплеровского сдвига частоты и нестабильности генератора приемника) литерных частот сигналов GLONASS. С этой точки зрения подходящими являются любые целые значения частот гетеродина в мегагерцах. С другой стороны, эта частота должна располагаться возможно ближе к полусумме частот GPS и средней литерной GLONASS, что при любой конечной полосе пропускания видеоусилителя обеспечит максимально возможную сквозную широкополосность всего тракта. Кроме того, для упрощения синтезатора в цифровой части приемника желательно, чтобы эта частота была кратна шагу литерных частот GLONASS (0,5625 МГц). Наиболее оптимальным значением частоты является величина 1590 МГц.
При построении систем ФАПЧ несущих (или при вторичной обработке результатов измерений) необходимо иметь в виду, что знаки отслеживаемых системой ФАПЧ отклонений частот от номиналов противоположны для сигналов GPS и GLONASS.
Таким образом, технический результат в предлагаемом способе достигается расположением частоты гетеродина между несущими частотами радиосигналов, а также введением дополнительно видеоусилителя с ограниченной полосой пропускания, расположением известных блоков и взаимосвязями между блоками.
Функциональная схема предлагаемого приемника приведена на фиг. 1, где 1 - антенна, принимающая сигналы навигационных спутниковых систем, 2 - широкополосный фильтр, 3 - широкополосный малошумящий усилитель, 4 - смеситель, 5 - синтезатор гетеродинной частоты, 6 - видеоусилитель с ограниченной полосой пропускания, 7 - опорный генератор, 8 - аналого-цифровой преобразователь, выход которого является входом цифровой радиоприемной системы приемника - 9.
Вход широкополосного фильтра 2 соединен с выходом антенны 1, а выход с входом широкополосного малошумящего усилителя 3, выход которого подключен к первому входу смесителя 4, ко второму входу которого подсоединен выход синтезатора гетеродинной частоты 5. Вход синтезатора гетеродинной частоты 5 соединен с выходом опорного генератора 7, выход смесителя 4 соединен со входом видеоусилителя с ограниченной полосой пропускания 6, выход которого является входом аналого-цифрового преобразователя 8, выходы которого являются входами цифровой радиоприемной системы 9, а последний вход подключен к выходу опорного генератора 7.
Сигнал из антенны 1, принимающей сигналы обеих спутниковых систем (GPS и GLONASS) проходит входной широкополосный фильтр 2, широкополосный малошумящий усилитель 3 и поступает на сигнальный вход смесителя 4. На гетеродинный вход этого смесителя поступает гетеродинный сигнал с частотой 1590 МГц от синтезатора 5.
Сигнал промежуточной частоты, представляющий собой наложение спектров сигналов GPS и GLONASS, усиливается видеоусилителем с ограниченной полосой пропускания, имеющими верхнюю частоту среза АЧХ не менее 50 МГц. Широкая полоса пропускания всего радиотракта является необходимым условием повышения точностных характеристик приемника, в том числе и снижения погрешности измерения дальности, вызванной многолучевым распространением сигналов спутников (полоса в десятки мегагерц позволила бы снизить эти ошибки до сантиметрового уровня).
Усиленный видеоусилителем сигнал подается на трехуровневый (двухтактовый) аддитивный аналого-цифровой преобразователь, способный существенно подавлять внутриполосные непрерывные помехи, что в значительной мере компенсирует потери помехоустойчивости, вызванные широкополосностью радиотракта и зеркальными каналами приема.
Список используемой литературы:
1. Описание приемника "3S-Navigation", AGARDLS-207, с. 3-1 - 3-28, июнь 1996;
2. Патент RU N 2067770;
3. Заявка Украины N 98105418 15.10.98 на "Способ и устройство полностью аппаратной цифровой обработки радиосигналов навигационных спутников GPS NAVSTAR и ГЛОНАСС".
4. Патент RU N 2110149 от 25.05.1993 г. "Приемник сигналов спутниковых радионавигационных систем".
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИЕМНИК СИГНАЛОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1993 |
|
RU2110149C1 |
| РАДИОПРИЕМНОЕ УСТРОЙСТВО АППАРАТУРЫ ПОТРЕБИТЕЛЕЙ СИГНАЛОВ ГЛОБАЛЬНЫХ СПУТНИКОВЫХ НАВИГАЦИОННЫХ СИСТЕМ | 2013 |
|
RU2551901C2 |
| УСТРОЙСТВО ДЛЯ ПРИЕМА СИГНАЛОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1999 |
|
RU2159448C1 |
| ПРИЕМНИК СИГНАЛОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1999 |
|
RU2167431C2 |
| УСТРОЙСТВО ДЛЯ ПРИЕМА СИГНАЛОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1998 |
|
RU2145422C1 |
| ПРИЕМНИК АППАРАТУРЫ ПОТРЕБИТЕЛЕЙ СИГНАЛОВ ГЛОБАЛЬНЫХ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 2001 |
|
RU2195685C1 |
| ПРИЕМНИК АППАРАТУРЫ ПОТРЕБИТЕЛЕЙ СИГНАЛОВ ГЛОБАЛЬНЫХ СПУТНИКОВЫХ НАВИГАЦИОННЫХ СИСТЕМ | 2007 |
|
RU2416102C2 |
| ЦИФРОВОЙ ПРИЕМНИК СПУТНИКОВОЙ НАВИГАЦИИ | 1995 |
|
RU2090902C1 |
| ПРИЕМОИНДИКАТОР СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1993 |
|
RU2067771C1 |
| СТАНЦИЯ СПУТНИКОВОЙ СВЯЗИ КОНТЕЙНЕРНОГО ИСПОЛНЕНИЯ | 2011 |
|
RU2455769C1 |
Способ обработки радиосигналов навигационных спутников GPS и ГЛОНАСС и аналоговый процессор предназначены для использования в радиотрактах простых дешевых интегрированных приемников спутниковой навигации, работающих по сигналам спутников GPS (США) и GLONASS (Россия). Операцию преобразования частоты сигнала производят с использованием гетеродинной частоты, которая располагается между спектрами сигналов GPS и ГЛОНАСС и выбирается в соответствии с выражением fНGPS < fГ < fНГЛОНАСС, где fHGPS - несущая частота сигналов GPS NAVSTAR, fГ - частота гетеродина, fHГЛОНАСС - несущая частота наименьшего используемого литера в системе ГЛОНАСС, при этом полоса пропускания видеоусилителя общая для сигналов обеих систем. Приемник не содержит элементов, относящихся к одной из названных систем, воспринимает и обрабатывает сигналы этих разных систем как сигналы одной системы. Предлагаемый приемник содержит лишь минимально необходимое количество функциональных элементов для обработки сигналов одной из систем, антенну, принимающую сигналы навигационных спутниковых систем, широкополосный фильтр, широкополосный малошумящий усилитель, смеситель, синтезатор гетеродинной частоты, опорный генератор, аналого-цифровой преобразователь, выход которого является входом цифровой радиоприемной системы приемника, дополнительно введен видеоусилитель с ограниченной полосой пропускания. Технический результат состоит в том, что предлагаемое устройство представляет собой предельно упрощенный радиотракт. В нем отсутствуют элементы, требующие настройки в процессе серийного производства. Кроме того, предлагаемый частотный план радиотракта существенно облегчает и упрощает построение синтезатора гетеродинной частоты и последующую цифровую обработку, а широкая сквозная полоса пропускания радиотракта повышает точность измерения псевдодальности. 2 с. и 1 з.п.ф-лы, 1 ил.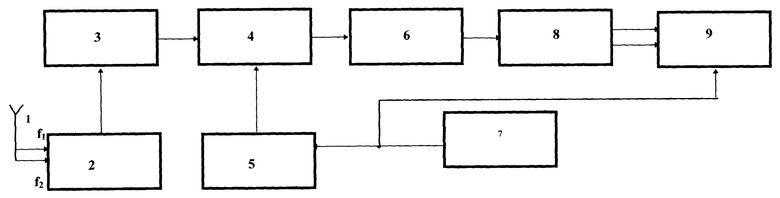
fHGPS < fГ < fНГЛОНАСС,
где fHGPS - несущая частота сигналов GPS NAVSTSR;
fГ - частота гетеродина;
fНГЛОНАСС - несущая частота наименьшего используемого литера в системе ГЛОНАСС,
при этом полоса пропускания видеоусилителя общая для сигналов обеих систем.
| ПРИЕМНИК СИГНАЛОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1993 |
|
RU2110149C1 |
| ПРИЕМНИК АППАРАТУРЫ ПОТРЕБИТЕЛЕЙ СИГНАЛОВ ГЛОБАЛЬНЫХ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1994 |
|
RU2067770C1 |
| ЦИФРОВОЙ ПРИЕМНИК СПУТНИКОВОЙ НАВИГАЦИИ | 1995 |
|
RU2090902C1 |
| ПРИЕМНИК АППАРАТУРЫ ПОТРЕБИТЕЛЕЙ СИГНАЛОВ ГЛОБАЛЬНЫХ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1996 |
|
RU2100821C1 |
| US 5434574 A, 18.07.1995 | |||
| Устройство регулирования напряжения трансформатора | 1974 |
|
SU513349A1 |
| Устройство для слежения за движущимся объектом | 1974 |
|
SU493784A1 |
| Способ футеровки центробежной формы центробежная форма | 1974 |
|
SU501829A1 |

