Изобретение относится к области радионавигации, а конкретно - к приемникам сигналов спутниковых радионавигационных систем (СРНС) GPS (США) и ГЛОНАСС (Россия), осуществляющих одновременный прием сигналов этих систем в частотном диапазоне L1 с кодовой модуляцией C/A кодом - кодом "стандартной точности".
Приемники сигналов СРНС ГЛОНАСС (Глобальная Навигационная Спутниковая Система) [1] и GPS (Global Position System) [2] в настоящее время широко используются для определения координат (широты, долготы, высоты) и скорости объектов, а также времени. При этом использование сигналов СРНС частотного диапазона L1 с кодовой модуляцией C/A кодом - кодом "стандартной точности" - обеспечивает "стандартную" точность определения.
Основные различия между СРНС GPS и ГЛОНАСС состоят в использовании различных, хотя и соседних частотных диапазонов, использовании отличающихся псевдошумовых модулирующих кодов и использовании соответственно кодового и частотного разделения сигналов различных спутников в системе. Так, в СРНС GPS в диапазоне частот L1 спутники излучают модулированные различными псевдошумовыми кодами сигналы на одной несущей частоте 1575,42 МГц, а спутники СРНС ГЛОНАСС излучают модулированные одним и тем же псевдошумовым кодом сигналы на различных несущих (литерных) частотах, лежащих в соседней частотной области.
Номиналы литерных частот в СРНС ГЛОНАСС формируются по правилу:
fi= fo+iΔfj,
где f1 - номиналы литерных частот;
f0 - нулевая литерная частота;
i - номера литерных частот;
Δ - интервал между литерными частотами.
Для частот рассматриваемого диапазона L1: f0 = 1602 МГц, Δ = 0,5625 МГц.
Распределение литерных частот среди функционирующих спутников СРНС ГЛОНАСС задается альманахом, передаваемым в кадре служебной информации.
Литерные частоты сигналов СНРС ГЛОНАСС вводятся в соответствии с "Интерфейсным контрольным документом" [1] . В настоящее время (с 1998 г.) введены литерные частоты диапазона от i = 0 до i = 12, в дальнейшем, в соответствии с [1], предусматривается переход на диапазон литерных частот от i = - 7 до i = 4. Смещение диапазона литерных частот сигналов СНРС ГЛОНАСС в другую частотную область связано с выделением новых частот для работы систем связи. В связи с этим возникает проблема обеспечения работоспособности аппаратуры, принимающей и обрабатывающей сигналы СРНС ГЛОНАСС, как в условиях указанного изменения диапазона литерных частот, так и в условиях усложнения помеховой обстановки, обусловленной работой систем связи в близком диапазоне частот.
Отмеченные выше различия между сигналами спутников СРНС GPS и ГЛОНАСС, вытекающие из кодового разделения при одной несущей в СРНС GPS и частотного разделения при нескольких несущих, определяемых литерными частотами, в СРНС ГЛОНАСС, обусловливают различия в технических средствах, с помощью которых осуществляются прием и корреляционная обработка сигналов этих СРНС.
Известен, например из [3, фиг. 1], приемник сигналов СРНС GPS, содержащий последовательно соединенные радиочастотный преобразователь и блок корреляционной обработки, связанный с вычислителем - навигационным процессором, при этом в состав радиочастотного преобразователя входят малошумящий усилитель, фильтр, смеситель, усилитель первой промежуточной частоты, квадратурный смеситель, два квантователя для синфазного и квадратурного каналов, а также формирователь сигнала первой гетеродинной частоты (1401,51 МГц) и блок деления, формирующий из сигнала первой гетеродинной частоты сигнал второй гетеродинной частоты.
Приемник решает техническую задачу приема и цифровой обработки сигналов СРНС GPS для осуществления радионавигационных измерений. Приемник не позволяет решить задачу приема сигналов СРНС ГЛОНАСС.
Известен, например, из [4, с. 146-148, рис.9.2], приемник сигналов СРНС ГЛОНАСС ("Одноканальная аппаратура потребителей "АСН-37" системы ГЛОНАСС"). Приемник содержит малошумящий усилитель-преобразователь, радиочастотный преобразователь, устройство цифровой обработки и связанный с ними посредством преобразователя-интерфейса (блока обмена данными) вычислитель (навигационный процессор). В состав малошумящего усилителя-преобразователя входят полосовые фильтры, усилитель, смеситель. В состав радиочастотного преобразователя входят усилитель промежуточной частоты, фазовый демодулятор, смеситель с фазовым подавлением зеркального канала, ограничитель и синтезатор литерных частот, работающий от опорного генератора. В состав устройства цифровой обработки входят генератор псевдослучайной последовательности (ПСП) с цифровым генератором тактовой частоты ПСП, цифровой генератор доплеровского сдвига частоты несущей, преобразователь фаза-код с накопителем цифровых выборок. Вычислитель (навигационный процессор) содержит микропроцессор серии 1806ВМ2, оперативное запоминающее устройство (оперативную память), постоянное запоминающее устройство (постоянную память). Синтезатор литерных частот формирует свои выходные сигналы в соответствии с литерными частотами принимаемых сигналов СРНС ГЛОНАСС. Шаг литерных частот, формируемых синтезатором, составляет 0,125 МГц. Сигнал первой гетеродинной частоты формируется в результате умножения частоты выходного сигнала синтезатора на четыре, а сигнал второй гетеродинной частоты - в результате деления частоты выходного сигнала синтезатора на два.
Приемник решает техническую задачу приема и цифровой обработки сигналов СРНС ГЛОНАСС для осуществления радионавигационных измерений. Приемник не позволяет решить задачу приема сигналов СРНС GPS.
Несмотря на различия, существующие между СРНС GPS и ГЛОНАСС, их близость по назначению, баллистическому построению орбитальной группировки спутников и используемому частотному диапазону позволяет ставить и решать задачи, связанные с созданием интегрированного приемника, работающего по сигналам этих двух систем. Достигаемый при этом результат состоит в повышении надежности, достоверности и точности определения местоположения объекта, в частности, за счет возможности выбора рабочих созвездий спутников с лучшими значениями геометрических факторов [4, с. 160].
В этой связи очевидна актуальность задачи разработки интегрированных приемников сигналов СРНС GPS и ГЛОНАСС, то есть приемников, работающих по сигналам обеих систем, и оптимизации технических решений, направленных на упрощение и минимизацию таких приемников.
Среди интегрированных приемников сигналов СРНС GPS и ГЛОНАСС известен, см. , например, [4, с. 158-161, рис. 9.8], приемник, решающий задачу приема сигналов СРНС GPS и ГЛОНАСС частотного диапазона L1. Приемник содержит радиочастотный преобразователь, опорный генератор и процессор первичной обработки, связанный с навигационным процессором. В состав радиочастотного преобразователя входят частотный разделитель ("диплексер"), осуществляющий частотное разделение сигналов СРНС GPS и ГЛОНАСС, полосовые фильтры и малошумящие усилители каналов GPS и ГЛОНАСС, смеситель, коммутатор, подключающий на сигнальный вход смесителя сигналы СРНС GPS или ГЛОНАСС, коммутатор, подключающий на опорный вход смесителя сигнал первого гетеродина для канала GPS или канала ГЛОНАСС. За счет соответствующего формирования частоты гетеродинного сигнала первая промежуточная частота является постоянной для сигналов СРНС GPS и ГЛОНАСС и весь дальнейший тракт приемника реализован как общий для этих сигналов. В состав процессора первичной обработки входят мультиплексор с постоянным запоминающим устройством, цифровой генератор литерных частот, цифровой коррелятор, генератор ПСП и вычислитель - микропроцессор, связанный с навигационным процессором.
Приемник решает техническую задачу поочередного (последовательного во времени) приема сигналов СРНС GPS и ГЛОНАСС при осуществлении радионавигационных измерений, при этом при приеме сигналов обеих систем используется один и тот же радиоприемный тракт. Приемник не позволяет решить задачу одновременного приема сигналов СРНС GPS и ГЛОНАСС, что увеличивает время, затрачиваемое на получение навигационной информации.
Известен интегрированный приемник сигналов СРНС GPS и ГЛОНАСС, описанный в [5], в котором решается задача одновременного приема сигналов обеих СРНС. Приемник сигналов СРНС GPS и ГЛОНАСС, описанный в [5], принят в качестве прототипа.
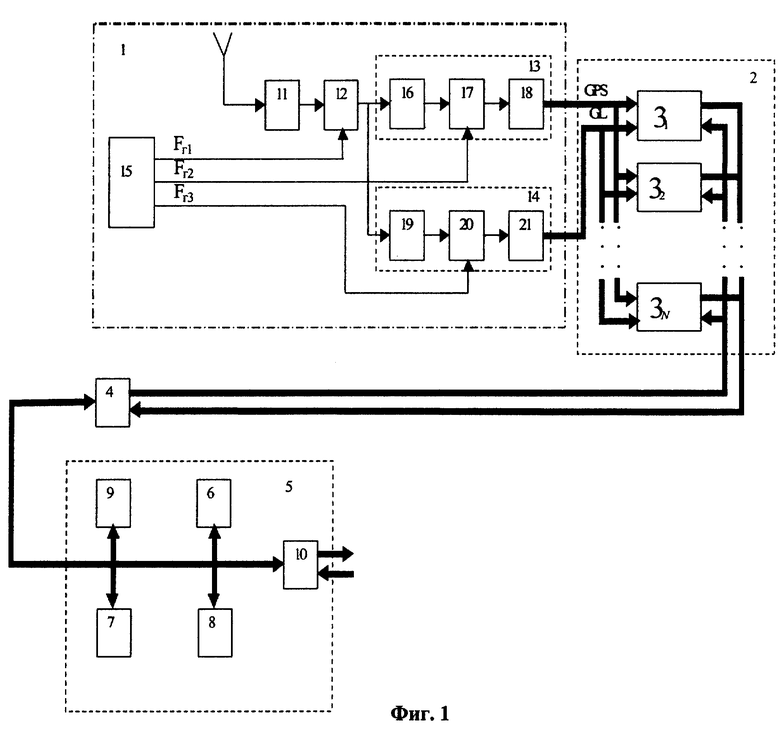
Структурная схема приемника сигналов СРНС GPS и ГЛОНАСС, принятого в качестве прототипа, представлена на фиг. 1.
Приемник-прототип (см. фиг. 1) содержит последовательно соединенные радиочастотный преобразователь 1, вход которого образует сигнальный вход приемника, и N канальный цифровой коррелятор 2, содержащий N каналов 3 (31, 32,.. . 3N), связанный посредством блока 4 обмена данными с вычислителем 5.
Вычислитель 5 содержит связанные шиной обмена данными процессор 6, оперативное запоминающее устройство (ОЗУ) 7, постоянное запоминающее устройство (ПЗУ) 8, часы 9 реального времени и блок 10 внешнего интерфейса, входы-выходы которого образуют информационные входы-выходы приемника.
Радиочастотный преобразователь 1 содержит входной блок 11, блок 12 первого преобразования частоты сигналов, первый 13 и второй 14 каналы второго преобразования частоты сигналов соответственно СРНС GPS и ГЛОНАСС, а также аппаратуру 15 формирования сигналов гетеродинных частот, содержащую блоки формирования сигналов первой, второй и третьей гетеродинных частот (на фиг. 1 не показаны), выходы которых образуют выходы сигналов соответственно первой, второй и третьей гетеродинных частот.
Входной блок 11 радиочастотного преобразователя 1 решает задачу предварительной фильтрации входных сигналов СРНС GPS и ГЛОНАСС и включает по крайней мере один полосовой фильтр (на фиг.1 не показан). Вход блока 11 образует вход радиочастотного преобразователя 1. К входу блока 11 подключается приемная антенна.
Блок 12 радиочастотного преобразователя 1 решает задачу первого преобразования частоты сигналов СРНС GPS и ГЛОНАСС и включает по крайней мере один усилитель и смеситель (на фиг. 1 не показаны).
Канал 13 второго преобразования частоты сигналов радиочастотного преобразователя 1 (канал второго преобразования частоты сигналов СРНС GPS) содержит последовательно соединенные фильтр 16, смеситель 17 и блок 18 аналого-цифрового преобразования, выход которого образует выход канала 13 - выход сигналов СРНС GPS.
Канал 14 второго преобразования частоты сигналов радиочастотного преобразователя 1 (канал второго преобразования частоты сигналов СРНС ГЛОНАСС) содержит последовательно соединенные фильтр 19, смеситель 20 и блок 21 аналого-цифрового преобразования, выход которого образует выход канала 14 - выход сигналов СРНС ГЛОНАСС.
Выходы каналов 13 и 14, являющиеся выходами радиочастотного преобразователя 1, связаны с первым и вторым сигнальными входами N канального цифрового коррелятора 2. Сигнальные входы цифрового коррелятора 2 связаны с соответствующими сигнальными входами каналов 3. Выходы и входы данных каналов 3 связаны посредством входной и выходной шин данных цифрового коррелятора 2 через блок 4 обмена данными с вычислителем 5.
В радиочастотном преобразователе 1 входы фильтров 16 и 19, являющиеся входами соответственно первого 13 и второго 14 каналов второго преобразования частоты сигналов, подключены к выходу блока 12 первого преобразования частоты сигналов. Вход блока 12 подключен к выходу входного блока 11. Опорный вход смесителя (на фиг. 1 не показан) блока 12 первого преобразования частоты сигналов, образующий опорный вход блока 12, соединен с выходом сигнала первой гетеродинной частоты аппаратуры 15. Опорные входы смесителей 17 и 20 первого 13 и второго 14 каналов второго преобразования частоты сигналов подключены соответственно к выходам сигналов второй и третьей гетеродинных частот аппаратуры 15.
Приемник-прототип работает следующим образом.
Принятые приемной антенной сигналы СРНС GPS и ГЛОНАСС частотного диапазона L1 через входной блок 11, осуществляющий в радиочастотном преобразователе 1 частотную фильтрацию сигналов данного частотного диапазона, поступают на вход блока 12 первого преобразования частоты сигналов.
В блоке 12 сигналы СРНС GPS и ГЛОНАСС частотного диапазона L1 усиливаются, а также преобразуются по частоте в смесителе, на опорный вход которого поступает сигнал первой гетеродинной частоты fг1 = 1416 МГц, формируемый в аппаратуре 15 с помощью соответствующего блока формирования сигнала первой гетеродинной частоты (на фиг. 1 не показан).
Преобразованные в блоке 12 сигналы СРНС GPS и ГЛОНАСС частотного диапазона L1 поступают на входы первого 13 и второго 14 каналов второго преобразования частоты сигналов, то есть на входы фильтров 16 и 19. Каждый из этих фильтров осуществляет фильтрацию сигналов одной из СРНС, а именно, фильтр 16 - фильтрацию сигналов СРНС GPS, а фильтр 19 - фильтрацию сигналов СРНС ГЛОНАСС.
Отфильтрованные с помощью фильтров 16 и 19 от внеполосных помех и разделенные по системам (GPS и ГЛОНАСС) преобразованные по частоте сигналы в каждом из каналов 13 и 14 поступают на сигнальные входы смесителей 17 и 20 соответственно.
Для второго преобразования частоты, осуществляемого в каналах 13 и 14, в приемнике-прототипе используются сигналы второй и третьей гетеродинных частот fг2 = 173,9 МГц и fг3 = 178,8 МГц, формируемые в аппаратуре 15 с помощью соответствующих блоков формирования сигналов второй и третьей гетеродинных частот (на фиг. 1 не показаны). При этом сигнал второй гетеродинной частоты fг2 = 173,9 МГц используется для преобразования сигналов СРНС GPS в смесителе 17 первого канала 13, а сигнал третьей гетеродинной частоты fг3 = 178,8 МГц используется для преобразования сигналов СРНС ГЛОНАСС в смесителе 20 второго канала 14.
Преобразованные с помощью смесителей 17 и 20 сигналы СРНС GPS и ГЛОНАСС далее поступают на входы блоков 18 и 21 аналого-цифрового преобразования, где преобразуются в цифровой вид, причем каждый из преобразуемых в цифровой вид сигналов GPS и ГЛОНАСС представляется в виде двух квадратурных составляющих этих сигналов. Преобразование в цифровой вид осуществляется с тактовой частотой Fт.
Для осуществления аналого-цифрового преобразования без потерь навигационной информации преобразуемые сигналы согласовываются по частоте и спектру со значением тактовой частоты Fт таким образом, чтобы удовлетворять теореме отсчетов Найквиста-Котельникова. Согласование обеспечивается путем выбора определенных значений тактовой и гетеродинных частот. В приемнике-прототипе значение тактовой частоты, определяющей частоту аналого-цифрового преобразования, то есть частоту дискретизации по времени, выбрано Fт=57,0 МГц. Значение тактовой частоты Fт=57,0 МГц выбрано с учетом обеспечения возможности обработки в приемнике-прототипе сигналов СРНС ГЛОНАСС в диапазоне частот с литерами от i = 0 до i = 24. С учетом этой частоты выбраны согласованные значения гетеродинных частот fг2 = 173,9 МГц и fг3 = 178,8 МГц для второго преобразования частоты сигналов, а именно таким образом, чтобы средняя частота сигналов СРНС GPS и ГЛОНАСС на второй промежуточной частоте была бы близка к 14,25 МГц. Это обеспечивает возможность дискретизации сигналов в блоках 18 и 21 с помощью 4-х битовых аналого-цифровых преобразователей с тактовой частотой Fт = 57,0 МГц (4 • 14,25 МГц), а также формирования последующих двухбитовых выборок синфазной и квадратурной составляющих сигналов СРНС GPS и ГЛОНАСС с частотой дискретизации, в два раза меньшей Fт, т.е. равной 28,5 МГц (2 • 14,25 МГц). Формирование указанных двухбитовых выборок синфазной и квадратурной составляющих сигналов СРНС GPS и ГЛОНАСС осуществляется с помощью элементов, функционально входящих в состав блоков 18, 21. В зависимости от варианта практической реализации эти элементы могут конструктивно входить в состав блоков 18,21 (фиг. 1), либо в состав отдельного конструктивного блока (на фиг. 1 этот вариант реализации не показан).
С выходов радиочастотного преобразователя 1 синфазная и квадратурная выборки сигналов СРНС GPS и ГЛОНАСС поступают (по двухпроводным линиям связи) на первый (GPS) и второй (ГЛОНАСС) сигнальные входы N канального цифрового коррелятора 2, осуществляющего в своих каналах 3 цифровую обработку сигналов спутников СРНС GPS и ГЛОНАСС в сочетании, определяемом командами, поступающими на входы данных каналов 3 с вычислителя 5 через блок 4 обмена данными. На тактовые входы каналов 3 при этом поступает тактовый сигнал с частотой Fт/2 (28,5 МГц).
В каналах 3 (31, 32,... 3N) N канального цифрового коррелятора 2 в соответствии с командами, поступающими от вычислителя 5 через блок 4 обмена данными, осуществляется корреляционная обработка сигналов спутников СРНС, в процессе которой определяется временное положение пиков корреляционных функций псевдошумовых сигналов спутников СРНС, то есть определяются радионавигационные параметры, используемые в расчетах местоположения объекта по сигналам спутников СРНС.
Корреляционная обработка сигналов спутников СРНС в каналах 3 цифрового коррелятора 2 осуществляется с помощью входящих в состав каждого из каналов 3 элементов: коммутатора входных сигналов, цифровых смесителей, цифрового управляемого генератора несущей, цифровых демодуляторов (корреляторов), программируемой линии задержки, генератора опорного C/A кода, цифрового управляемого генератора кода, блоков накопления, регистра управления (на фиг. 1 не показаны).
С помощью коммутатора входных сигналов в канале 3 осуществляется выделение сигналов одной из СРНС (GPS или ГЛОНАСС). С помощью цифровых смесителей в канале 3 обеспечивают выделение сигналов определенного спутника СРНС и перенос спектра этих сигналов в основную полосу частот (на нулевую частоту). При этом используются сигналы, формируемые цифровым управляемым генератором несущей. Цифровые демодуляторы (корреляторы) канала 3 осуществляют корреляцию сигналов спутника с точной "P" (Punctual) и разностной "E-L" (Early-Late) или ранней "E" (Early) копиями опорного C/A кода СРНС GPS или ГЛОНАСС соответственно. Указанные копии кода вырабатываются в каждом из каналов 3 программируемой линией задержки, которая под управлением вычислителя 5 через блок 4 обмена данными позволяет изменять интервал между ранней и поздней копиями C/A кода от 0,1 до 1 длительности символа C/A кода и, следовательно, формировать "узкий дискриминатор" ("узкий коррелятор") в системе слежения за кодом [6, 7, 8]. Опорные псевдослучайные C/A коды сигналов спутников СРНС GPS или ГЛОНАСС вырабатываются в каждом из каналов 3 генератором опорного C/A кода, получающим для этого тактовую частоту кода 1,023 МГц для GPS или 0,511 МГц для ГЛОНАСС, формируемую цифровым управляемым генератором кода. Выбор вида вырабатываемой псевдослучайной кодовой последовательности и значения тактовой частоты кода осуществляется по командам вычислителя 5, поступающим на управляющие входы этих генераторов через блок 4 обмена данными. Результаты корреляции накапливаются в соответствующих блоках накопления. Период накопления равен периоду C/A кода, то есть 1 мс. Накопленные данные периодически считываются через блок 4 обмена данными вычислителем 5, в котором реализуются все алгоритмы обработки сигналов, то есть алгоритмы поиска сигналов, слежения за несущей и кодом, прием служебной информации. В соответствии с результатами корреляционной обработки сигналов спутников СРНС в каналах 3 цифрового коррелятора 2 вычислитель 5 формирует управляющие сигналы для работы каналов 3, в том числе значения несущей частоты для цифрового управляемого генератора несущей и значения тактовой частоты кода для цифрового управляемого генератора кода. Работа программируемой линией задержки, генератора опорного C/A кода, коммутатора входных сигналов определяется командами, формируемыми регистром управления под воздействием команд, поступающих с вычислителя 5 через блок 4 обмена данными.
Функционирование вычислителя 5 осуществляется по алгоритму, реализуемому процессором 6 с помощью программ и данных, хранящихся в ПЗУ 8 и ОЗУ 7, в соответствии с временными сигналами, формируемыми в часах 9 реального времени. Данные результатов обработки сигналов в приемнике-прототипе выдаются через блок 10 внешнего интерфейса, через него же в вычислитель 5 поступают сигналы внешнего управления.
Решения, реализуемые в приемнике-прототипе при приеме и частотном преобразовании принимаемых сигналов, основываются на отсутствии ограничений на количество синтезаторов, используемых при формировании сигналов гетеродинных частот. Так, в устройстве-прототипе используются гетеродинные сигналы с частотами 1416 МГц, 173,9 МГц и 178,8 МГц. Ни одна из этих гетеродинных частот не может быть получена из другой гетеродинной частоты путем простого умножения или деления. Поэтому гетеродинные частоты в приемнике-прототипе синтезируются с помощью трех отдельных формирователей (синтезаторов) гетеродинных частот. Каждый из указанных синтезаторов гетеродинных частот представляет собой сложное по реализации, самостоятельное радиотехническое устройство. Сложность синтезаторов гетеродинных частот для приемников сигналов СРНС обусловлена высокими требованиями, предъявляемыми к стабильности синтезируемых частот (относительная нестабильность частоты 10-11•10-12 за 1 с. [9] ), поскольку от этого в значительной степени зависят выходные характеристики приемника в целом.
Решения, реализуемые в приемнике-прототипе при приеме и обработке принимаемых сигналов, основываются на использовании сигналов СРНС ГЛОНАСС определенного диапазона литерных частот (с номерами литер от i = 0 до i = 24) и соответствующего этому диапазону значению тактовой частоты Fт = 57 МГц. При этом в приемнике-прототипе не предусмотрены технические средства для приема сигналов СРНС ГЛОНАСС с номерами литер в диапазоне от i = -7 до i = - 1, вводимыми в соответствие с [1]. Возможное решение задачи приема сигналов СРНС ГЛОНАСС с литерными частотами, включающими в себя и указанные дополнительные литерные частоты, в рамках структуры приемника-прототипа может быть достигнуто за счет расширения (примерно на 30%) полосы пропускания радиочастотного преобразователя 1 для сигналов СРНС ГЛОНАСС и соответствующего увеличения тактовой частоты (частоты дискретизации) для цифрового коррелятора 2. При этом, однако, возникают проблемы с обеспечением помехоустойчивости приемника при воздействии сигналов связных систем, излучаемых в том же частотном диапазоне, что и сигналы литерных частот с i = 12 по i = 24, а увеличение тактовой частоты приводит к увеличению потребляемой цифровым коррелятором 2 мощности прямо пропорционально увеличению значения частоты.
Задачей заявляемого изобретения является создание устройства, осуществляющего одновременный прием и преобразование сигналов СРНС GPS и ГЛОНАСС, промодулированных кодами стандартной точности (C/A кодами) в диапазоне L1, с использованием двух синтезаторов для формирования гетеродинных частот (а не трех, как в прототипе), с обеспечением возможности приема и обработки сигналов СРНС ГЛОНАСС в условиях вводимых в соответствии с [1] новых диапазонов литерных частот сигналов СРНС ГЛОНАСС, а именно - в диапазонах i = 0 - 12 и i = -7 - 4, без увеличения полосы пропускания радиочастотного преобразователя, с обеспечением требуемой частотной избирательности, определяющей помехозащищенность приемника, и с обеспечением возможности работы цифрового коррелятора на минимальной тактовой частоте (20 - 22) МГц.
Сущность изобретения заключается в том, что в приемнике сигналов СРНС, содержащем последовательно соединенные радиочастотный преобразователь, вход которого образует сигнальный вход приемника, и N канальный цифровой коррелятор, связанный посредством блока обмена данными с вычислителем, содержащим связанные шиной обмена данными процессор, ОЗУ, ПЗУ, часы реального времени и блок внешнего интерфейса, входы-выходы которого образуют информационные входы-выходы приемника, причем радиочастотный преобразователь содержит входной блок, включающий по крайней мере один полосовой фильтр, подключенный к выходу входного блока блок первого преобразования частоты сигналов, включающий по крайней мере один усилитель и смеситель, подключенные к выходу блока первого преобразования частоты сигналов первый и второй каналы второго преобразования частоты сигналов соответственно СРНС GPS и ГЛОНАСС, каждый из которых содержит последовательно соединенные фильтр, смеситель и блок аналого-цифрового преобразования, выход которого образует выход канала, а также содержащую блоки формирования сигналов первой, второй и третьей гетеродинных частот аппаратуру формирования сигналов гетеродинных частот, выход сигнала первой гетеродинной частоты которой, образованный выходом блока формирования сигнала первой гетеродинной частоты, подключен к опорному входу смесителя блока первого преобразования частоты сигналов, выход сигнала второй гетеродинной частоты, образованный выходом блока формирования сигнала второй гетеродинной частоты, подключен к опорному входу смесителя первого канала второго преобразования частоты сигналов, выход сигнала третьей гетеродинной частоты, образованный выходом блока формирования сигнала третьей гетеродинной частоты, подключен к опорному входу смесителя второго канала второго преобразования частоты сигналов, в радиочастотном преобразователе в аппаратуре формирования сигналов гетеродинных частот блок формирования сигнала третьей гетеродинной частоты выполнен в виде делителя частоты на восемь, вход которого подключен к выходу блока формирования сигнала первой гетеродинной частоты, а блоки формирования сигналов первой и второй гетеродинных частот выполнены в виде перестраиваемых синтезаторов частоты, опорные входы которых подключены к выходу опорного генератора, а управляющие входы связаны через соответствующий канал блока обмена данными с ПЗУ вычислителя, в котором дополнительно введены первый и второй блоки хранения данных гетеродинных и промежуточных частот соответственно для первого и второго режимов работы приемника, соответствующих приему сигналов СРНС ГЛОНАСС первого и второго диапазонов литерных частот с номерами литер "0" - "12" и "-7" - "4".
Сущность заявляемого изобретения, возможность его осуществления и промышленного использования поясняются чертежами и частотными диаграммами, представленными на фиг. 1 - 6, где:
на фиг. 1 изображена структурная схема прототипа;
на фиг. 2 представлен пример структурной схемы заявляемого приемника сигналов СРНС в рассматриваемом варианте реализации;
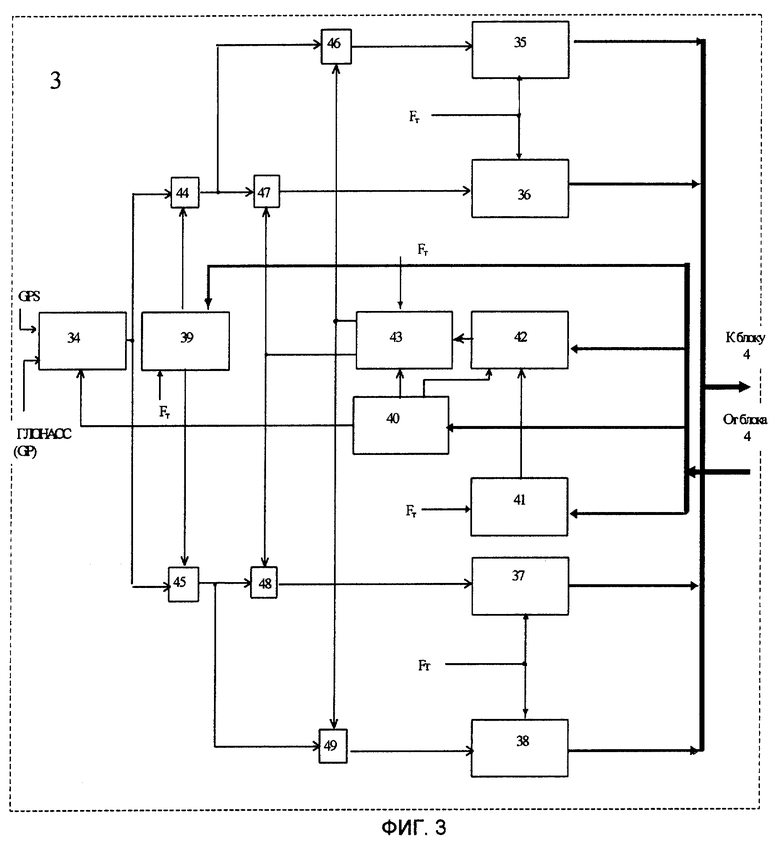
на фиг. 3 представлен пример структурной схемы одного канала N канального цифрового коррелятора заявляемого приемника сигналов СРНС в рассматриваемом варианте реализации;
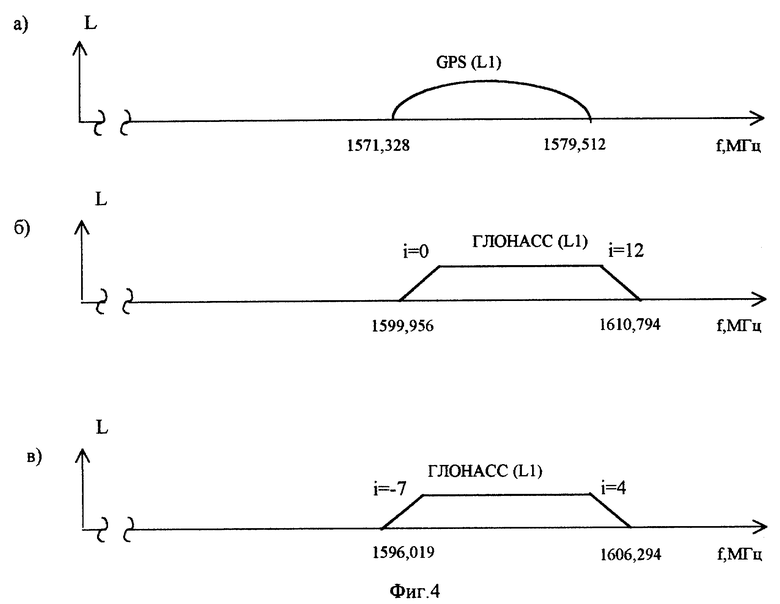
на фиг. 4 представлены частотные диаграммы, поясняющие распределение частотных полос сигналов СРНС GPS (фиг. 4a) и сигналов СРНС ГЛОНАСС с номерами литерных частот первого диапазона "0" - "12" (фиг. 46) и второго диапазона "-7" - "4" (фиг. 4в) до первого преобразования частоты;
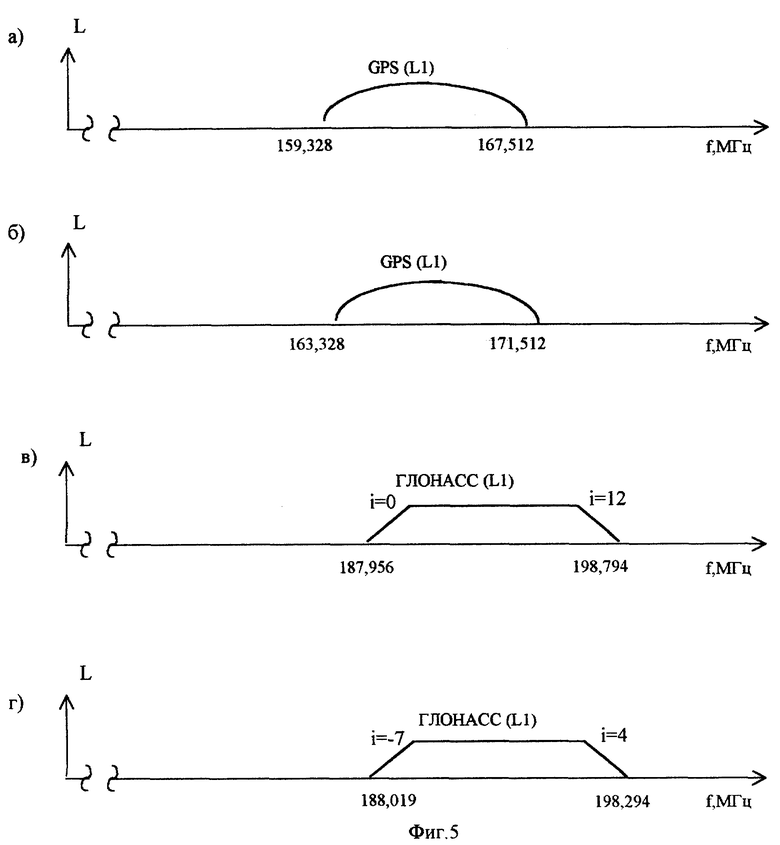
на фиг. 5 представлены частотные диаграммы, поясняющие распределение частотных полос сигналов СРНС GPS (фиг. 5а,б) и ГЛОНАСС (фиг. 5в,г) после первого преобразования частоты в заявляемом приемнике сигналов СРНС для первого (фиг. 5а, в) и второго (фиг. 5б,г) режимов работы приемника, соответствующих приему сигналов СРНС ГЛОНАСС первого и второго диапазонов литерных частот с номерами литер "0" - "12" и "-7" -"4" соответственно;
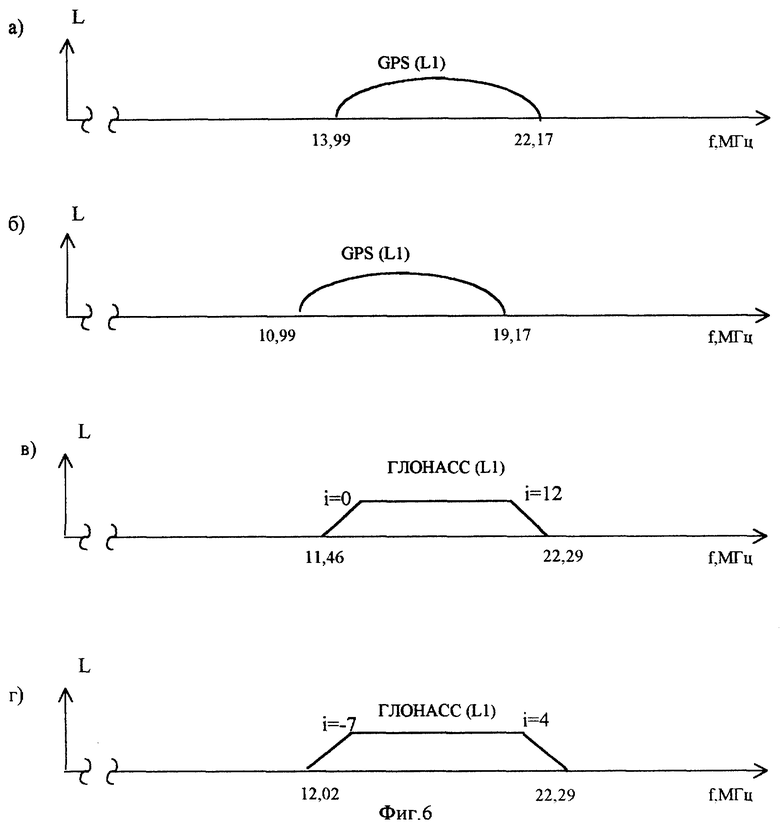
на фиг. 6 представлены частотные диаграммы, поясняющие распределение частотных полос сигналов СРНС GPS (фиг. 6а,б) и ГЛОНАСС (фиг. 6в,г) после второго преобразования частоты в заявляемом приемнике сигналов СРНС для первого (фиг. 6а, в) и второго (фиг. 5б,г) режимов работы приемника, соответствующих приему сигналов СРНС ГЛОНАСС первого и второго диапазонов литерных частот с номерами литер "0" - "12" и "- 7" - "4" соответственно.
Заявляемый приемник сигналов СРНС в рассматриваемом примере реализации содержит (см. фиг. 2 и 3) последовательно соединенные радиочастотный преобразователь 1, вход которого образует сигнальный вход приемника, и N канальный цифровой коррелятор 2, содержащий N каналов 3 (31, 32,....3N, связанный посредством блока 4 обмена данными с вычислителем 5.
Вычислитель 5 содержит связанные шиной обмена данными процессор 6, ОЗУ 7, ПЗУ 8, часы 9 реального времени и блок 10 внешнего интерфейса, входы-выходы которого образуют информационные входы-выходы приемника.
Радиочастотный преобразователь 1 содержит входной блок 11, блок 12 первого преобразования частоты сигналов, первый 13 и второй 14 каналы второго преобразования частоты сигналов соответственно СРНС GPS и ГЛОНАСС, а также аппаратуру 15 формирования сигналов гетеродинных частот.
Канал 13 второго преобразования частоты сигналов радиочастотного преобразователя 1 (канал второго преобразования частоты сигналов СРНС GPS) содержит последовательно соединенные фильтр 16, смеситель 17 и блок 18 аналого-цифрового преобразования, выход которого образует выход канала 13 - выход преобразованных сигналов СРНС GPS.
Канал 14 второго преобразования частоты сигналов радиочастотного преобразователя 1 (канал второго преобразования частоты сигналов СРНС ГЛОНАСС) содержит последовательно соединенные фильтр 19, смеситель 20 и блок 21 аналого-цифрового преобразования, выход которого образует выход канала 14 - выход преобразованных сигналов СРНС ГЛОНАСС.
Входной блок 11 радиочастотного преобразователя 1, решающий задачу предварительной фильтрации входных сигналов СРНС GPS и ГЛОНАСС, содержит по крайней мере один полосовой фильтр. В рассматриваемом примере реализации (фиг. 2), имеющем практическое применение, входной блок 11 содержит последовательно соединенные первый полосовой фильтр 22, усилитель 23 и второй полосовой фильтр 24.
К входу блока 11, то есть к входу фильтра 22, подключается приемная антенна.
Блок 12 радиочастотного преобразователя 1, решающий задачу первого преобразования частоты сигналов СРНС GPS и ГЛОНАСС, содержит по крайней мере один усилитель и смеситель. В рассматриваемом примере реализации (фиг. 2), имеющем практическое применение, блок 12 содержит последовательно соединенные первый усилитель 25, смеситель 26 и второй усилитель 27.
В практических схемах в состав смесителей 17, 20 каналов 13 и 14 входят усилители с регулируемым коэффициентом усиления, а блоки 18, 21 аналого-цифрового преобразования каналов 13 и 14 могут быть выполнены, например, в виде пороговых устройств, выполняющих функцию двухбитовых квантователей по уровню.
Аппаратура 15 формирования сигналов гетеродинных частот содержит блок 28 формирования сигнала первой гетеродинной частоты, блок 29 формирования сигнала второй гетеродинной частоты и блок 30 формирования сигнала третьей гетеродинной частоты, выходы которых образуют выходы сигналов соответственно первой, второй и третьей гетеродинных частот аппаратуры 15. В состав аппаратуры 15 входит также опорный генератор 31.
В заявляемом приемнике блоки 28 и 29 формирования сигналов первой и второй гетеродинных частот выполнены в виде перестраиваемых синтезаторов частоты, а блок 30 формирования сигнала третьей гетеродинной частоты - в виде делителя частоты на восемь. Опорные входы блоков 28 и 30 формирования сигналов первой и второй гетеродинных частот подключены к выходу опорного генератора 31. Вход блока 30 формирования сигнала третьей гетеродинной частоты подключен к выходу блока 28 формирования сигнала первой гетеродинной частоты.
Управляющие входы блоков 28 и 29 связаны через соответствующий канал блока 4 обмена данными с ПЗУ 8 вычислителя 5, в котором дополнительно введены первый 32 и второй 33 блоки хранения данных гетеродинных и промежуточных частот соответственно для первого и второго режимов работы приемника, соответствующих приему сигналов СРНС ГЛОНАСС первого и второго диапазонов литерных частот с номерами литер "0" - "12" и "-7" - "4".
Входы фильтров 16 и 19, являющиеся входами соответственно первого 13 и второго 14 каналов второго преобразования частоты сигналов, подключены к выходу блока 12 первого преобразования частоты сигналов, то есть к выходу усилителя 27. Вход блока 12, то есть вход усилителя 25, подключен к выходу входного блока II, то есть к выходу полосового фильтра 24.
Выход сигнала первой гетеродинной частоты аппаратуры 15, то есть выход блока 28, подключен к опорному входу смесителя 26 блока 12 первого преобразования частоты сигналов. Выход сигнала второй гетеродинной частоты аппаратуры 15, то есть выход блока 29, подключен к опорному входу смесителя 17 канала 13 второго преобразования частоты сигналов. Выход сигнала третьей гетеродинной частоты аппаратуры 15, то есть выход блока 30, подключен к опорному входу смесителя 20 канала 14 второго преобразования частоты сигналов.
Выходы каналов 13 и 14, являющиеся выходами радиочастотного преобразователя 1, подключены к первому и второму сигнальным входам N канального цифрового коррелятора 2.
В заявляемом приемнике сигналов СРНС N канальный цифровой коррелятор 2 может быть выполнен, например, в соответствии со стандартной структурной схемой многоканального коррелятора, представленной, в частности, в [5]. При таком выполнении каждый из каналов 3 N канального цифрового коррелятора 2 содержит (см. фиг. 3) коммутатор входных сигналов 34, блоки 35, 36, 37 и 38 накопления, цифровой управляемый генератор 39 несущей, регистр 40 управления, цифровой управляемый генератор 41 кода, генератор 42 опорного C/A кода (GPS и ГЛОНАСС), программируемую линию задержки 43, цифровые смесители 44 и 45 соответственно синфазного и квадратурного каналов корреляционной обработки, корреляторы (цифровые демодуляторы) 46, 47, 48, 49. Выходы блоков накопления 35 - 38, управляющий вход цифрового управляемого генератора 39 несущей, управляющий вход регистра 40 управления, управляющий вход цифрового управляемого генератора 41 кода и первый вход генератора 42 опорного C/A кода каждого из каналов 3 связаны посредством входной и выходной шин данных цифрового коррелятора 2 через блок 4 обмена данными с вычислителем 5.
В каждом из каналов 3 первый и второй входы (входы GPS и ГЛОНАСС) коммутатора 34 входных сигналов подключены к соответствующим сигнальным входам N канального цифрового коррелятора 3. Управляющий вход коммутатора 34 входных сигналов подключен к первому выходу регистра 40 управления. Второй и третий выходы регистра 40 управления подключены соответственно к входу программируемой линии задержки 43 и второму входу генератора 42 опорного C/A кода. Выход коммутатора 34 соединен с первыми входами цифровых смесителей 44 и 45, вторые входы которых подключены соответственно к первому и второму выходам цифрового управляемого генератора 39 несущей. Тактовые входы блоков 35-38 накопления, цифрового управляемого генератора 39 несущей, цифрового управляемого генератора 41 кода, программируемой линии задержки 43 образуют вход тактовых сигналов канала 3, который подключен к тактовому входу N канального цифрового коррелятора 2. Выходы цифровых смесителей 44 и 45 соединены с первыми входами корреляторов (цифровых демодуляторов) 46, 47 и 48, 49 соответственно. Вторые входы корреляторов (цифровых демодуляторов) 46, 49 и 47, 48 соединены с соответствующими выходами программируемой линии задержки 43 - выходами точной "Р" (Punctual) и разностной "E-L" (Early-Late) или ранней "Е" (Early) копий опорного C/A кода СРНС GPS или ГЛОНАСС. Сигнальный вход программируемой линии задержки 43 соединен с выходом генератора 42 опорного C/A кода, формирующего C/A код СРНС GPS или ГЛОНАСС, третий вход которого подключен к выходу цифрового управляемого генератора 41 кода. Выходы корреляторов (цифровых демодуляторов) 46 - 49 подключены соответственно ко входам блоков 35 - 38 накопления.
Составляющие заявляемый приемник элементы, узлы, блоки являются известными элементами, узлами и блоками, практически используемыми в технике приема и корреляционной обработки сигналов СРНС.
Так, в радиочастотном преобразователе 1 входной блок 11, включающий полосовые фильтры 22, 24 и усилитель 23, может быть реализован, например, с использованием стандартных керамических фильтров, реализующих функции полосовых фильтров, и усилителя типа MGA-87563 фирмы HEWLETT-PACKARD.
Входящие в состав блока 12 первого преобразования частоты сигналов усилитель 25 и смеситель 26 могут быть реализованы, например, с использованием микросхемы типа МС13142 фирмы MOTOROLA, а усилитель 27 блока 12 - с использованием микросхемы типа UPC2715 фирмы NEC.
Входящие в состав каналов 13 и 14 второго преобразования частоты сигналов фильтры 16 и 19 могут быть реализованы в виде полосовых фильтров на поверхностно-акустических волнах (ПАВ), см., например, [10, с. 217-220]; смесители 17, 20 и входящие в их состав усилители с регулируемым коэффициентом усиления могут быть реализованы, например, с использованием микросхем типа UPC2753 фирмы NEC, а пороговые устройства блоков 18, 21 аналого-цифрового преобразования - с использованием сдвоенных компараторов типа МАХ 962 фирмы MAXIM.
N канальный цифровой коррелятор 2 с рассмотренной структурой выполнения каналов при практической реализации приемника может быть выполнен в виде БИС большой степени интеграции с использованием библиотек стандартных элементов, например, фирм SAMSUNG ELECTRONICS или SGS TOMSON.
Блок 4 обмена данными и вычислитель 5 - обычные, общеизвестные устройства цифровой вычислительной техники.
Составляющие аппаратуру 15 формирования сигналов гетеродинных частот блоки 28, 29, 30 и опорный генератор 31 реализуются на выпускаемых промышленностью элементах.
Так, входящий в состав аппаратуры 15 опорный генератор 31 может быть реализован в виде кварцевого генератора, формирующего сигнал с частотой 15,36 МГц. В частности, может использоваться термокомпенсированный кварцевый генератор типа TEMPUS-LVA фирмы MOTOROLA.
Блоки 28 и 29 формирования сигналов первой и второй гетеродинных частот, представляющие собой синтезаторы частот, могут быть выполнены в виде последовательно соединенных блока фазовой автоподстройки частоты (ФАПЧ) и генератора, управляемого напряжением, выход которого, образующий выход синтезатора частоты, подключен к сигнальному входу блока ФАПЧ, опорный и управляющий входы которого образуют опорный и управляющий входы блока. В качестве генератора, управляемого напряжением, в таком синтезаторе может использоваться, например, генератор, входящий в состав указанной выше микросхемы МС13142 фирмы MOTOROLA, используемой для реализации усилителя 25 и смесителя 26 блока 12 первого преобразования частоты сигналов. Блок ФАПЧ синтезатора может быть реализован, например, с использованием микросхемы типа LMX2330 фирмы NATIONAL SEMICONDUCTOR, которая содержит в своем составе делители входной и опорной частоты, фазовый детектор, буферный и внутренний регистры, обеспечивающие функционирование петли ФАПЧ. Коэффициенты деления частоты указанных делителей блока ФАПЧ при его реализации на указанной микросхеме LMX2330 устанавливаются внешними сигналами - цифровыми кодами, поступающими на управляющие входы этой микросхемы через соответствующий канал блока 4 обмена данными из блоков 32, 33 ПЗУ 8 вычислителя 5. Передача этих кодов осуществляется по последовательному интерфейсу. Коэффициенты деления делителей блока ФАПЧ устанавливаются исходя из требуемого соотношения между опорной частотой (15,36 МГц), формируемой опорным генератором 31, и частотой гетеродина, формируемой генератором, управляемым напряжением, в зависимости от режима работы приемника, определяемого диапазоном литерных частот сигналов СРНС ГЛОНАСС (номера литер "0" - "12" или "- 7" - "4"). Фазовый детектор блока ФАПЧ вырабатывает напряжение, соответствующее рассогласованию фаз опорного сигнала и сигнала гетеродина (поступающих с выходов соответствующих делителей частоты), которое используется для подстройки частоты генератора, управляемого напряжением, с помощью его управляющего элемента - варикапа. Это напряжение поступает на указанный варикап через входящий в состав блока ФАПЧ фильтр, обеспечивающий формирование передаточной характеристики петли ФАПЧ с полосой 50 кГц.
Указанное построение блоков 28 и 29 формирования сигналов первой и второй гетеродинных частот соответствует стандартному построению синтезаторов частот, см., например, [11, с. 2-3...2-14, фиг. 6].
Блок 30 формирования сигнала третьей гетеродинной частоты, представляющий собой делитель частоты на восемь, может быть выполнен на основе стандартно выпускаемых делителей частоты, например, делителей частоты типа МС12095 фирмы MOTOROLA, работающих в режиме деления на 2, и делителей частоты типа МС 12093 фирмы MOTOROLA, работающих в режиме деления на 4.
Работу заявляемого приемника рассмотрим на примере приема и обработки сигналов СРНС GPS и ГЛОНАСС, промодулированных кодами стандартной точности (C/A кодами) в диапазоне LI, для случая, когда сигналами СРНС ГЛОНАСС являются сигналы с литерными частотами первого ("0" - "12") или второго ("- 7" - "4") диапазонов.
Заявляемый приемник работает следующим образом.
Принятые антенной сигналы СРНС GPS и ГЛОНАСС частотного диапазона L1 поступают на сигнальный вход радиочастотного преобразователя 1, то есть на вход входного блока 11 (фиг. 2). Сигналы СРНС GPS диапазона LI занимают частотные полосы шириной Δ F = 8,184 МГц (по четыре лепестка в спектре сигнала в обе стороны от несущей для реализации "узкого коррелятора"), а сигналы СРНС ГЛОНАСС диапазона L1 занимают частотные полосы шириной Δ F 10,838 МГц (случай литерных частот "О" - "12") и Δ F = 10,2755 МГц (случай литерных частот "-7" - "4"). Положение частотных полос, занимаемых на оси частот сигналами СРНС GPS и ГЛОНАСС, показано на фиг. 4, где фиг. 4а - полоса частот сигналов CPHC GPS диапазона L1 - (1571,328 - 1579, 512) МГц, фиг. 4б - полоса частот сигналов СРНС ГЛОНАСС диапазона L1 для случая литерных частот диапазона "0" - "12" (1599,956 - 1610, 794) МГц, фиг. 4в - полоса частот сигналов СРНС ГЛОНАСС диапазона L1 для случая литерных частот диапазона "- 7" - "4" (1596,019 - 1606, 294) МГц. Входной блок 11 пропускает на свой выход сигналы СРНС GPS и ГЛОНАСС диапазона L1 указанных частотных полос (то есть частоты от 1571, 328 МГц до 1610, 794 МГц).
Во входном блоке 11 сигналы СРНС GPS и ГЛОНАСС поступают на вход первого полосового фильтра 22, осуществляющего частотную фильтрацию сигналов данного частотного диапазона. С выхода фильтра 22 сигналы СРНС GPS и ГЛОНАСС поступают через усилитель 23 на вход фильтра 24, который в рассматриваемом случае выполнен аналогично фильтру 22 и имеет ту же амплитудно-частотную характеристику. Использование двух полосовых фильтров 22 и 24, связанных между собой усилителем 23, позволяет реализовать необходимые характеристики входного блока 11 по частотной избирательности и соотношению сигнал/шум при указанной общей полосе пропускания (1571,328 - 1610, 794) МГц.
С выхода блока 11 сигналы СРНС GPS и ГЛОНАСС частотного диапазона L1 поступают на вход блока 12 первого преобразования частоты сигналов, где усиливаются в первом усилителе 25, преобразуются по частоте в смесителе 26 и усиливаются во втором усилителе 27 (усилителе первой промежуточной частоты).
Для первого преобразования частоты, осуществляемого в смесителе 26 блока 12, используется сигнал первой гетеродинной частоты, синтезируемый в блоке 28 из опорных сигналов частотой 15,36 МГц, сформированных опорным генератором 31. В первом режиме работы заявляемого приемника частота сигнала первой гетеродинной частоты устанавливается fг1(1) = 1412 МГц, а во втором - fг1(2) = 1408 МГц.
В результате первого преобразования частоты положение частотных полос, занимаемых сигналами СРНС GPS и ГЛОНАСС, на оси частот изменяется, как показано на фиг. 5, где фиг. 5а - расположение частотных полос сигналов СРНС GPS для первого режима работы - (159,328 - 167,512) МГц, фиг. 5б - расположение частотных полос сигналов СРНС GPS для второго режима работы - (163,328 - 171,512) МГц, фиг. 5в - расположение частотных полос сигналов СРНС ГЛОНАСС для первого режима работы - (187,956 - 198,794) МГц, фиг. 5г - расположение частотных полос сигналов СРНС ГЛОНАСС для второго режима работы - (188,019 - 198,294) МГц.
Преобразованные на первую промежуточную частоту в блоке 12 радиочастотного преобразователя 1 сигналы СРНС GPS и ГЛОНАСС с выхода усилителя 27 поступают на входы первого 13 и второго 14 каналов второго преобразования частоты сигналов, то есть на входы фильтров 16 и 18. Каждый из этих фильтров осуществляет полосовую фильтрацию сигналов соответствующей СРНС, а именно, фильтр 16 - фильтрацию сигналов СРНС GPS в диапазоне частот (159,328 - 171,512) МГц, а фильтр 19 - фильтрацию сигналов СРНС ГЛОНАСС в диапазоне частот (187,956 - 198,794) МГц.
Отфильтрованные от внеполосных помех преобразованные на первую промежуточную частоту сигналы СРНС GPS (фиг. 5а,б) с выхода фильтра 16 поступают на сигнальный вход смесителя 17, где осуществляется второе преобразование частоты сигналов СРНС GPS.
Отфильтрованные от внеполосных помех преобразованные на первую промежуточную частоту сигналы СРНС ГЛОНАСС (фиг. 5в,г) с выхода фильтра 19 поступают на сигнальный вход смесителя 20, где осуществляется второе преобразование частоты сигналов СРНС ГЛОНАСС.
Для второго преобразования частоты сигналов СРНС GPS, осуществляемого в смесителе 17 канала 13, используется сигнал второй гетеродинной частоты, синтезируемый в блоке 29 из опорных сигналов частотой 15,36 МГц, сформированных опорным генератором 31. В первом режиме работы заявляемого приемника частота сигнала второй гетеродинной частоты устанавливается fг2(1) = 179 МГц, а во втором - fг2(2) = 183 МГц.
Для второго преобразования частоты сигналов СРНС ГЛОНАСС, осуществляемого в смесителе 20 канала 14, используется сигнал третьей гетеродинной частоты, формируемой в блоке 30 путем деления на восемь частоты сигнала первой гетеродинной частоты, синтезируемого блоком 28. В первом режиме работы заявляемого приемника частота сигнала третьей гетеродинной частоты устанавливается fг33(1) = 1/8•fu1(1) = 176,5 МГц, а во втором - fг3(2) = 1/8•fг1(2) = 176 МГц.
В результате второго преобразования частоты положение частотных полос, занимаемых сигналами СРНС GPS и ГЛОНАСС, на оси частот изменяется как показано на фиг. 6, где фиг. 6а - расположение частотных полос сигналов СРНС GPS для первого режима работы - (13,99 - 22,17) МГц, фиг. 6б - расположение частотных полос сигналов СРНС GPS для второго режима работы - (10,99 - 19,17) МГц, фиг. 6в - расположение частотных полос сигналов СРНС ГЛОНАСС для первого режима работы - (11,46 - 22,29) МГц, фиг. 6г - расположение частотных полос сигналов СРНС ГЛОНАСС для второго режима работы - (12,02 - 22,29) МГц.
Преобразованные с помощью смесителей 17 и 20 сигналы СРНС GPS и ГЛОНАСС в каждом из каналов 13 и 14 второго преобразования частоты сигналов усиливаются с помощью усилителей с регулируемыми коэффициентами усиления, входящих в состав смесителей, после чего подвергаются аналого-цифровому преобразованию в блоках 18 и 21.
В практических схемах аналого-цифровое преобразование в блоках 18 и 21 может заключаться, например, в двухбитовом квантовании по уровню с помощью соответствующих пороговых устройств, например, сдвоенных компараторов типа МАХ 962 фирмы MAXIM. При таком аналого-цифровом преобразовании для сигналов, формируемых блоками 18 и 21, характерным является наличие несущей, которая "снимется" далее в каналах 3 N канального коррелятора 2, а именно, в цифровых смесителях 44 и 45 синфазных и квадратурных каналов корреляционной обработки.
Сформированные таким образом в радиочастотном преобразователя 1 сигналы СРНС GPS и ГЛОНАСС с выходов блоков 18 и 19, то есть с выходов каналов 13 и 14, поступают на первый (GPS) и второй (ГЛОНАСС) сигнальные входы N канального цифрового коррелятора 2, где в каналах 3 (31, 32,..3N) осуществляется корреляционная обработка сигналов спутников СРНС GPS и ГЛОНАСС в сочетании, определяемом командами, поступающими на управляющие входы каналов 3 с вычислителя 5 через блок 4 обмена данными. На тактовые входы каналов 3 цифрового коррелятора 2 при этом поступает тактовый сигнал с частотой Fт. Формирование тактового сигнала может осуществляться с помощью отдельного генератора тактовых сигналов. В практических схемах формирование тактовых сигналов может осуществляться из сигналов гетеродинных частот, например, из сигнала третьей гетеродинной частоты путем деления этой частоты на восемь - Fт = 1/8 • fг3. При таком формировании тактовых сигналов значение тактовой частоты Fт - частоты временной дискретизации при цифровой обработке сигналов в N канальном цифровом корреляторе 2 составляет величину Fт ≈ 22 МГц. Таким образом, значение тактовой частоты Fт и значение полосы частот преобразуемых сигналов СРНС GPS и ГЛОНАСС находятся между собой в примерном соотношении 2: 1, что позволяет осуществить цифровую обработку сигналов без потерь навигационной информации. При этом достаточно низкое значение тактовой частоты Fт ≈ 22 МГц облегчает реализацию цифрового коррелятора 2, снижает потребляемую им мощность.
В процессе корреляционной обработки сигналов спутников СРНС, осуществляемой в каждом из каналов 3 (31, 32,...3N) N канального цифрового коррелятора 2 в соответствии с командами, поступающими от вычислителя 5 через блок 4 обмена данными, определяются временные положения пиков корреляционных функций псевдошумовых сигналов спутников СРНС, представляющие собой искомые радионавигационные параметры, используемые при вычислении местоположения объекта по сигналам спутников СРНС.
Работа канала 3 в рассматриваемом примере реализации осуществляется следующим образом. С сигнальных входов N канального цифрового коррелятора 2 двухбитовые квантованные сигналы СРНС GPS и ГЛОНАСС поступают в каждом из каналов 3 на первый и второй сигнальные входы коммутатора 34 входных сигналов. Коммутатор 34 входных сигналов по команде, формируемой регистром 40 управления под воздействием управляющих сигналов процессора 5, поступающих в регистр 40 через блок 4 обмена данными, выбирает какой из двух сигналов (GPS или ГЛОНАСС) будет обрабатываться в данном канале. Цифровой управляемый генератор 39 несущей вырабатывает синфазную и квадратурную составляющие фазы несущей частоты опорного сигнала, которые перемножаются с входным сигналом в цифровых смесителях 44 и 45.
Цифровые смесители 44 и 45 канала 3 обеспечивают выделение сигнала данной литеры СРНС ГЛОНАСС или сигнала данного спутника СРНС GPS и перенос спектра этого сигнала на основную полосу частот (на нулевую частоту). Тем самым в результате перемножения сигналов в цифровых смесителях 44 и 45 осуществляется "снятие" несущей синфазной и квадратурной составляющих обрабатываемого сигнала,
Цифровой управляемый генератор 39 несущей управляется процессором 5 через блок 4 обмена данными для замыкания петель слежения за частотой и фазой несущей входного сигнала. При этом значение частоты выходного сигнала, формируемого цифровым управляемым генератором 39 несущей, устанавливается в зависимости от режима работы заявляемого приемника. В первом режиме работы (i = 0 - 12) установка частоты выходного сигнала генератора 39 осуществляется на основе данных, хранящихся в блоке 32 ПЗУ 8 вычислителя 5, а во втором режиме (i = -7 - 4) - данных, хранящихся в блоке 33 ПЗУ 8 вычислителя 5.
После "снятия" несущей в цифровых смесителях 44 и 45 синфазная и квадратурные составляющие сигнала коррелируются в корреляторах 46-49 с копиями опорного C/A кода, формируемых с помощью следующих блоков: цифрового управляемого генератора 41 кода, генератора 42 опорного C/A кода (GPS и ГЛОНАСС) и программируемой линии задержки 43.
Цифровой управляемый генератор 41 кода генерирует тактовый сигнал C/A кода - 1,023 МГц для GPS или 0,511 МГц для ГЛОНАСС, который затем поступает на соответствующий вход генератора 42 опорного C/A кода (GPS и ГЛОНАСС). Выбор значения тактовой частоты кода осуществляется в соответствии с командами вычислителя 5, поступающими на управляющий вход генератора 41 через блок 4 обмена данными.
Опираясь на тактовый сигнал C/A кода, поступающий с выхода цифрового управляемого генератора 41 кода, генератор 42 опорного C/A кода генерирует опорный C/A код для обработки в данном канале 3 сигнала соответствующего спутника соответствующей СРНС. Генерируемый генератором 42 опорный C/A код уникален для каждого спутника СРНС GPS, использующих кодовое разделение сигналов, и одинаков для всех спутников СРНС ГЛОНАСС, использующих частотное разделение сигналов. Выбор вида кода, то есть вида определенной псевдослучайной кодовой последовательности, осуществляется в соответствии с командами вычислителя 5, поступающими на первый вход генератора 42 через блок 4 обмена данными.
Сформированный генератором 42 опорный C/A код поступает на программируемую линию задержки 43. Программируемая линия задержки 43 осуществляет временной сдвиг опорного C/A кода, формируя на своих двух выходах точную "Р" (пунктуальную) и разностную "E-L" (раннюю-минус-позднюю) копию опорного C/A кода. Точная "Р" (пунктуальная) копия опорного C/A кода подается на вторые входы корреляторов 46 и 49, а разностная "E-L" (ранняя-минус-поздняя) копия опорного C/A кода - на вторые входы корреляторов 47 и 48. Работа программируемой линии задержки осуществляется под действием управляющих сигналов, формируемых регистром 40 управления, управляемого вычислителем 5 через блок 4 обмена данными. При этом осуществляется изменение интервала между ранней и поздней копиями C/A кода от 0,1 до 1 длительности символа C/A кода, тем самым формируется "узкий дискриминатор" ("узкий коррелятор") в системе слежения за кодом [6, 7, 8].
Результаты корреляционной обработки обрабатываемого сигнала, осуществляемой в корреляторах 46 - 49, накапливаются в блоках 35-38 накопления на интервале времени, равном длительности эпохи кода (1 мс), а затем считываются процессором 5 через блок 4 обмена данными и используются им для замыкания петель слежения за кодом и несущей обрабатываемого сигнала.
Функционирование вычислителя 5 осуществляется по стандартным алгоритмам навигационного вычислителя многоканального приемника сигналов СРНС. Эти алгоритмы реализуются процессором 6 с помощью программ и данных, хранящихся в ПЗУ 8 и ОЗУ 7 вычислителя 5, в соответствии с временными сигналами, формируемыми в часах 9 реального времени.
Выходные данные результатов обработки сигналов в приемнике выдаются через блок 10 внешнего интерфейса вычислителя 5, через этот же блок 10 в вычислитель 5 поступают сигналы внешнего управления.
Изменение режима работы заявляемого приемника, соответствующее переходу сигналов СРНС ГЛОНАСС с первого диапазона литерных частот (i = 0 - 12) на второй диапазон (i = -7 - 4), осуществляется, например, под действием команд внешнего управления, поступающих через блок 10 внешнего интерфейса в процессор 6 и ПЗУ 8 вычислителя 5. Изменение режима работы заявляемого приемника может осуществляться, например, по часам 9 реального времени в соответствии с датой вводимых изменений (до 2005 года - первый режим, с 2005 года - второй режим). При установке режима работы в ПЗУ 8 вычислителя 5 инициируется соответствующий блок 32 или 33 хранения данных гетеродинных и промежуточных частот соответственно для первого и второго режимов работы приемника при приеме сигналов СРНС ГЛОНАСС первого ("0" - "12") и второго ("- 7" - "4") диапазонов литерных частот.
Таким образом, в заявляемом устройстве решается поставленная техническая задача - обеспечивается возможность в рамках одного приемника осуществлять прием и преобразование сигналов СРНС GPS и ГЛОНАСС в условиях вводимых в соответствии с [1] новых диапазонов литерных частот сигналов СРНС ГЛОНАСС, а именно - диапазонов с номерами литер "0" - "12" и "-7" - "4", без увеличения полосы пропускания радиочастотного преобразователя, с обеспечением требуемой частотной избирательности, определяющей помехозащищенность приемника, и с обеспечением возможности работы цифрового коррелятора на минимальной тактовой частоте (20 - 22) МГц. Решение задачи осуществляется без какой-либо замены узлов и блоков приемника, в том числе без замены или изменения полосовых фильтров, определяющих частотную избирательность и помехозащищенность приемника. Решение задачи осуществляется при использовании двух (а не трех, как в прототипе) синтезаторов, используемых для формирования гетеродинных частот, а именно - синтезаторов первой и второй гетеродинных частот.
Из рассмотренного видно, что заявляемое изобретение осуществимо, промышленно применимо, решает поставленную техническую задачу и имеет перспективы по использованию в качестве портативных приемников, работающих одновременно по сигналам СРНС GPS и ГЛОНАСС и реализующих "стандартную точность" навигационных местоопределений. При этом обеспечивается возможность функционирования приемника в условиях смены литерных частот сигналов СРНС ГЛОНАСС, осуществляемой в соответствии с [1].
Источники информации
1. "Глобальная Навигационная Спутниковая Система - ГЛОНАСС. Интерфейсный контрольный документ. КНИЦ ВКС Россия", 1995.
2."Global Position System. Standard Positioning Service. Signal Specification." США, 1993.
3. Global Positioning System (GPS) Receiver RF Front End. Analog-DigitI Converter. Rockwell International Proprietary Information Order Number. May 31, 1995.
4. Сетевые спутниковые радионавигационные системы / В.С.Шебшаевич, П.П. Дмитриев, Н.В.Иванцевич и др. // М., Радио и связь, 1993.
5. Riley S. , Howard N., Aardoom E" Daly P., Silvestrin P. "A Combined GPS/GLONASS High Precision Receiver for Spase Applications"/ Proc. jfION GPS-95, Palm Springs, CA, US, Sept. 12-15, 1995, p. 835-844.
6. A. J. Van Dierendonck., Pat. Fenton and Tom Ford. Theory and Performance of Narrow Correlator Spacing in a GPS Reciever. Navigation: Jornal of The Institute of Navigation, Vol. 39, N, 3, 1982.
7. Патент США N 5390207, кл. G 01 S 5/02, H 04 B 7/185, опубл. 14.02.95. (Fenton, A. J. Van Dierendonck, "Pseudorandom noise ranging receiver which compensates for multipath distortion by dynamically adjusting the time delay spacing between early and late correlators").
8. Патент США N 5495499, кл. H 04 L 9/00, опубл. 27.02.96. (Fenton, A.J. Van Dierendonck, "Pseudorandom noise ranging receiver which compensates for multipath distortion by dynamically adjusting the time delay spacing between early and late correlators").
9. Moses I. Navstar Global Positioniny System oscillator regnirements for the GPS Manpack. Proc. of the 30th Annual Freguency Control Sympos., 1976, pp. 390-400.
10. Радиоприемные устройства / Банков В.Н., Барулин Л.Г., Жодзишский М. И. и др. / М., Радио и связь, 1984.
11. Professional Products 1C Handbook May 1991. GEC Plessey Semiconductors.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНТЕГРИРОВАННЫЙ ПРИЕМНИК СИГНАЛОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1999 |
|
RU2146378C1 |
| УСТРОЙСТВО ДЛЯ ПРИЕМА СИГНАЛОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1998 |
|
RU2145422C1 |
| УСТРОЙСТВО ДЛЯ ПРИЕМА СИГНАЛОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1999 |
|
RU2159448C1 |
| ПРИЕМНИК СИГНАЛОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 2000 |
|
RU2178894C1 |
| МИКРОМОДУЛЬ ДЛЯ ЧАСТОТНОГО ПРЕОБРАЗОВАНИЯ СИГНАЛОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 2004 |
|
RU2256936C1 |
| УСТРОЙСТВО ДЛЯ ПРИЕМА СИГНАЛОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 2004 |
|
RU2280260C1 |
| ЦИФРОВОЙ КОРРЕЛЯТОР ПРИЕМНИКА СИГНАЛОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 2006 |
|
RU2310212C1 |
| СПОСОБ ПОИСКА СИГНАЛОВ СПУТНИКОВ В МНОГОКАНАЛЬНОМ ПРИЕМНИКЕ СИГНАЛОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 2006 |
|
RU2318221C1 |
| МНОГОКАНАЛЬНЫЙ КОРРЕЛЯТОР И ПРИЕМНИК НАВИГАЦИОННЫЙ | 2008 |
|
RU2388009C2 |
| СПОСОБ И УСТРОЙСТВО ПРЯМОГО ПРЕОБРАЗОВАНИЯ ЧАСТОТЫ ДЛЯ ПРИЕМНИКОВ СПУТНИКОВОЙ НАВИГАЦИИ ГЛОНАСС | 2014 |
|
RU2562443C1 |
Изобретение относится к радионавигации. Приемник содержит радиочастотный преобразователь, N канальный цифровой коррелятор, вычислитель и блок обмена данными. Вычислитель содержит процессор, оперативное запоминающее устройство, постоянное запоминающее устройство (ПЗУ), часы реального времени и блок внешнего интерфейса. Радиочастотный преобразователь содержит входной блок, аппаратуру формирования сигналов гетеродинных частот, блок первого преобразования частоты сигналов, каналы второго преобразования частоты сигналов соответственно СРНС GPS и ГЛОНАСС. Каждый из каналов содержит фильтр, смеситель и блок аналого-цифрового преобразования. В состав аппаратуры формирования сигналов гетеродинных частот входят опорный генератор и блоки формирования сигналов первой, второй и третьей гетеродинных частот, выходы которых подключены к соответствующим смесителям блока первого преобразования частоты сигналов и каналов второго преобразования частоты сигналов. Блок формирования сигнала третьей гетеродинной частоты выполнен в виде делителя частоты на восемь, его вход подключен к выходу блока формирования сигнала первой гетеродинной частоты. Блоки формирования сигналов первой и второй гетеродинных частот выполнены в виде перестраиваемых синтезаторов частоты, управляющие входы которых связаны через блок обмена данными с ПЗУ, в котором дополнительно введены первый и второй блоки хранения данных гетеродинных и промежуточных частот соответственно для первого и второго режимов работы приемника, соответствующих приему сигналов СРНС ГЛОНАСС первого и второго диапазонов литерных частот с номерами литер "0" - "12" и "-7"- "4". Достигаемым техническим результатом является возможность в рамках одного приемника осуществить прием и преобразование сигналов СРНС GPS и ГЛОНАСС в условиях вводимых новых диапазонов литерных частот сигналов СРНС ГЛОНАСС. 6 ил.
Приемник сигналов спутниковых радионавигационных систем, содержащий последовательно соединенные радиочастотный преобразователь, вход которого образует сигнальный вход приемника, и N канальный цифровой коррелятор, связанный посредством блока обмена данными с вычислителем, содержащим связанные шиной обмена данными процессор, оперативное запоминающее устройство, постоянное запоминающее устройство, часы реального времени и блок внешнего интерфейса, входы-выходы которого образуют информационные входы-выходы приемника, причем радиочастотный преобразователь содержит входной блок, включающий по крайней мере один полосовой фильтр, подключенный к выходу входного блока, блок первого преобразования частоты сигналов, включающий по крайней мере один усилитель и смеситель, подключенные к выходу блока первого преобразования частоты сигналов, первый и второй каналы второго преобразования частоты сигналов соответственно спутниковых радионавигационных систем (СРНС) GPS и ГЛОНАСС, каждый из которых содержит последовательно соединенные фильтр, смеситель и блок аналого-цифрового преобразования, выход которого образует выход канала, а также содержащую блоки формирования сигналов первой, второй и третьей гетеродинных частот аппаратуру формирования сигналов гетеродинных частот, выход сигнала первой гетеродинной частоты которой, образованный выходом блока формирования сигнала первой гетеродинной частоты, подключен к опорному входу смесителя блока первого преобразования частоты сигналов, выход сигнала второй гетеродинной частоты, образованный выходом блока формирования сигнала второй гетеродинной частоты, подключен к опорному входу смесителя первого канала второго преобразования частоты сигналов, выход сигнала третьей гетеродинной частоты, образованный выходом блока формирования сигнала третьей гетеродинной частоты, подключен к опорному входу смесителя второго канала второго преобразования частоты сигналов, отличающийся тем, что в радиочастотном преобразователе в аппаратуре формирования сигналов гетеродинных частот блок формирования сигнала третьей гетеродинной частоты выполнен в виде делителя частоты на восемь, вход которого подключен к выходу блока формирования сигнала первой гетеродинной частоты, а блоки формирования сигналов первой и второй гетеродинных частот выполнены в виде перестраиваемых синтезаторов частоты, опорные входы которых подключены к выходу опорного генератора, а управляющие входы связаны через соответствующий канал блока обмена данными с постоянным запоминающим устройством вычислителя, при этом в указанном постоянном запоминающем устройстве дополнительно введены первый и второй блоки хранения данных гетеродинных и промежуточных частот соответственно для первого и второго режимов работы приемника, соответствующих приему сигналов СРНС ГЛОНАСС первого и второго диапазонов литерных частот с номерами литер "0" - "12" и "7" - "4".
| RILEY S., HOWARD N., AARDOOM E., DALY P., SILVESTIN P | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| RU 2124214 C1, 27.12.1987 | |||
| Радиотехнические системы/Под ред | |||
| КАЗАРИНОВА Ю.М | |||
| - М.: Высшая школа, 1990, с.308, 309 | |||
| Способ фиксации зеленого чайного листа | 1973 |
|
SU460862A1 |

