Изобретение относится к машиностроению для легкой и текстильной промышленности и может быть использовано для равнения движущегося текстильного материала по кромке при сматывании его в рулон и настилании для раскроя.
Известно устройство (пат. РФ 2078733 РФ, кл. В 65 H 23/02, 1997) для равнения движущегося материала по кромке, содержащее два неподвижно закрепленных рабочих органа, смонтированных на каретке, имеющей возможность поворота на оси в плоскости, перпендикулярной направлению движения материала; привод для поворота каретки; оптронные датчики, следящие за положением кромки движущегося материала, и систему управления.
Недостатком данного устройства является конструктивно заложенная погрешность отработки возмущающего воздействия.
Наиболее близким аналогом заявленного изобретения является тканенаправитель, содержащий два неподвижно закрепленных рабочих органа, смонтированных на поворотной каретке, привод поворота каретки, регулируемый рычаг, связанный с поворотной кареткой толкателем, оптронные датчики, следящие за положением кромки движущегося материала, и систему управления (см. патент GB 2139988, кл. В 65 H 23/02, 1984).
Однако известный тканенаправитель также не обеспечивает хорошее качество равнения материала.
Задачей изобретения является повышение качества равнения движущегося материала по кромке.
Технический результат достигается тем, что в тканенаправителе, содержащем два неподвижно закрепленных рабочих органа, смонтированных на поворотной каретке, привод поворота каретки, регулируемый рычаг, связанный с поворотной кареткой толкателем, оптронные датчики, следящие за положением кромки движущегося материала, и систему управления, согласно изобретению поверхность толкателя выполнена по форме тела вращения с обеспечением постоянного контактного взаимодействия с прорезью вилки каретки при изменении угла ее наклона, а регулируемый рычаг имеет привод для изменения передаточного отношения привода каретки в соответствии с законом изменения возмущающего воздействия.
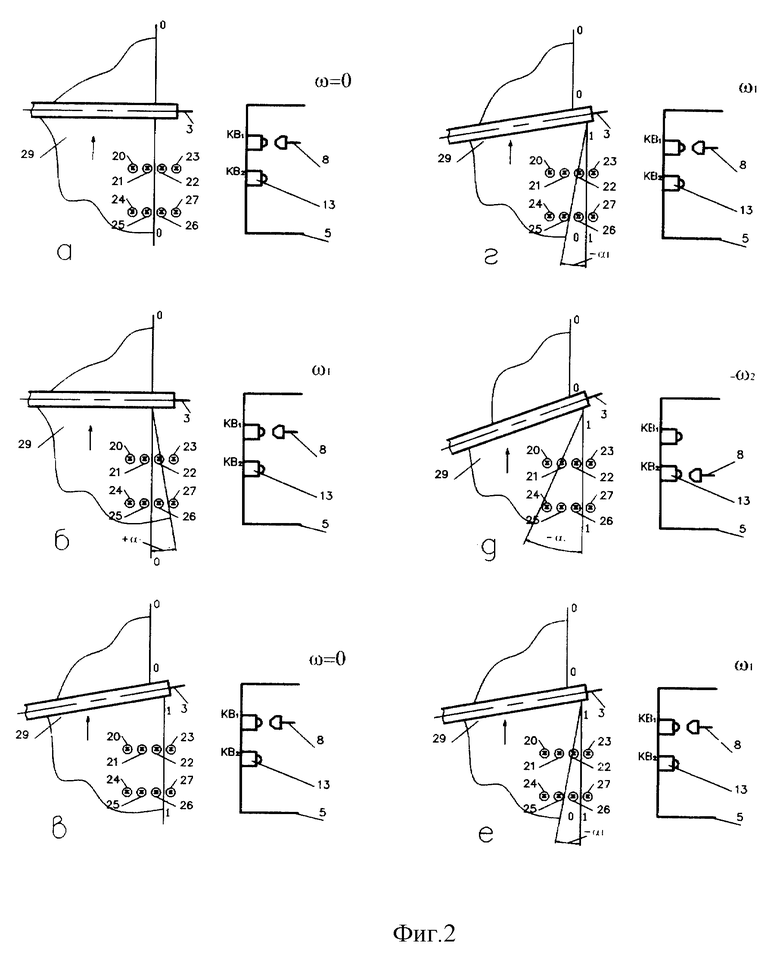
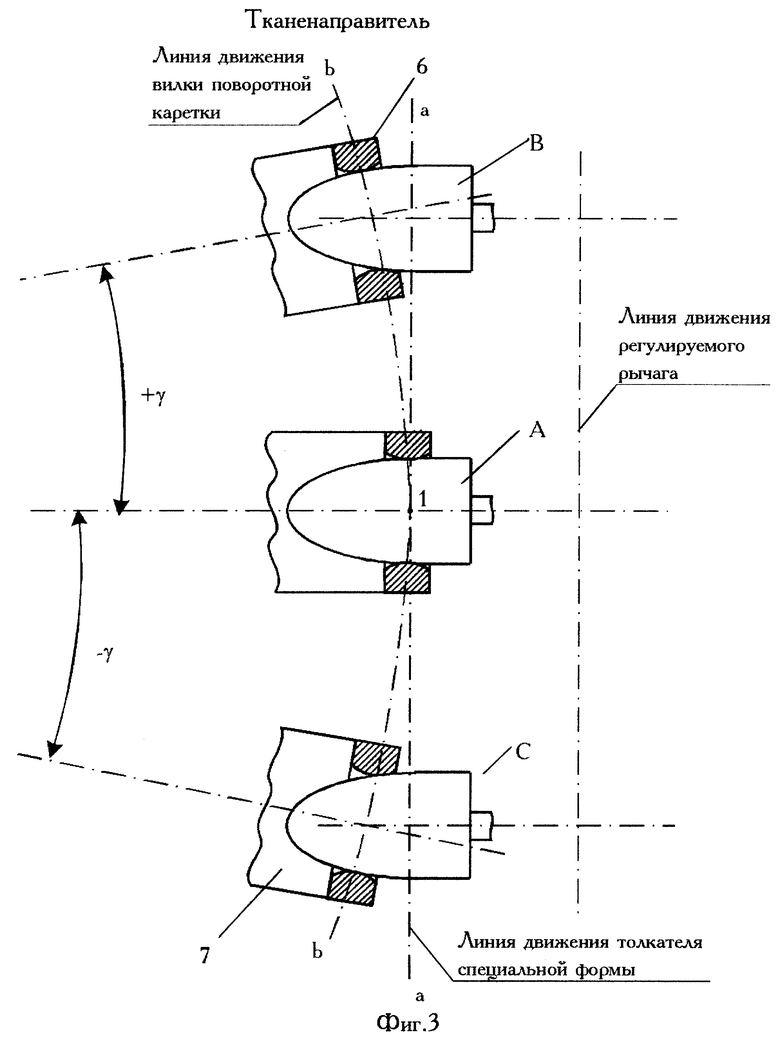
На фиг. 1 приведена кинематическая схема тканенаправителя; на фиг. 2а,б, в, г, д, е - элементы технологической схемы работы регулируемого рычага; на фиг. 3 - характерные фрагменты взаимодействия толкателя специальной формы с вилкой поворотной рамки.
Тканенаправитель содержит рабочие органы 1 и 2, зацепленные на поворотной каретке 3, имеющей возможность поворота относительно оси 4. Каретка 3 связана с регулируемым рычагом 5 посредством вилки 6 и специальной формы толкателя 7, установленного с толкателем 8 на гайке 9, взаимодействующей с винтом 10, и получающего движение через муфту 11 от электродвигателя 12, предназначенного для изменения коэффициента передачи Кi привода каретки. Для контроля положения толкателя 8 на регулируемом рычаге установлены концевые выключатели 13. Зацепление толкателя специальной формы 7 с вилкой каретки 3 осуществлено через непосредственное контактное взаимодействие (см. фиг. 3).
На схеме показано три положения A, B и C толкателя специальной формы и вилки каретки. Положение A - исходное. Вилка 6 и соответственно каретка 3 могут быть отклонены на максимальные углы +γ и -γ. Поверхность толкателя 7 перемещается в вертикальной плоскости по линии "а-а", представляющей собой дугу окружности, центр которой совпадает с осью вращения вала звездочки 19. Вилка 6 поворачивается вокруг оси 4 по линии "b-b" также в вертикальной плоскости, но расположенной перпендикулярно плоскости поворота регулируемого рычага 5. Линия "b-b" представляет собой дугу окружности, центр которой находится на оси 4. Линии "а-а" и "b-b" имеют только одну точку касания 1 в исходном положении механизма. Поверхность толкателя 7 выполнена в форме тела вращения, полученной методом графического синтеза по условию обеспечения постоянного контактного взаимодействия с прорезью вилки 6 при изменении угла ее наклона на +γ и -γ.
Привод для поворота регулируемого рычага 5 включает в себя электродвигатель 14, ременную зубчатую передачу 15, червяк 16, червячное колесо 17, цепную передачу 18, ведомую звездочку 19, на валу которой установлен регулируемый рычаг 5.
Для контроля положения одной из боковых кромок материала устройство содержит оптронные датчики 20 - 27, установленные на входе материала в зону действия тканенаправителя, и блок управления 28.
Устройство работает следующим образом.
Материал 29 при движении по технологическому тракту проходит через тканенаправитель таким образом, что первый по ходу движения рабочий орган 1 охватывается материалом сверху, а второй рабочий орган 2, - снизу /см. фиг. 1/.
При прохождении кромки материала в зоне установки датчиков 20-23 и 24 - 27 /см. фиг. 2а/ их состояние определяет сам факт поперечного перемещения материала, его направление и закон изменения угла атаки. Если кромка материала при его транспортировании проходит между датчиками 21, 22 и 25, 26, определяющими первую зону регулирования, то обеспечивается номинальный технологически заданный режим движения ткани. При этом датчики 21, 25 закрыты, а датчики 22, 26 открыты и сигналы определенного уровня поступают на вход блока управления 28, согласно которым на его выходе формируется отключение цепи управления электродвигателями 12 и 14.
При отсутствии управляющих сигналов с выхода блока управления 28 электродвигателями гайка 9 с толкателями 7 и 8 будет находиться в нейтральном /исходном/ положении и плоскость каретки 3, в которой установлены рабочие органы 1 и 2, будет в некотором приближении перпендикулярна условной контрольной линии "0-0" движущегося материала.
При изменении положения кромки движущейся ленты изменяется количество открытых и закрытых датчиков, сформируются функции управления электродвигателем 14 поворота каретки 3 и электродвигателем 12, обеспечивающим ее поворот с необходимой скоростью ωi по закону выявленного возмущения - изменению угла атаки материала αi на первый, по ходу движения, рабочий орган тканенапрвителя.
Коэффициент передачи Кi и закон изменения угловой скорости ωi характеризуется отношением расстояний Lk и Li осей поворота каретки 3 и поворота регулируемого рычага 5 до центра толкателя 7, т.е. Ki = Li/Lk.
При этом величина Lk является постоянной и конструктивно заложенной, а величина Li - переменной и соответствующей расположению концевых выключателей 13.
Известная скорость движения материала по технологическому тракту и информация с оптронных датчиков позволяют определить и записать закон изменения возмущающего параметра αi в блок управления 28, который и обеспечивает требуемую величину Li, соответствующую управляющему воздействию ωi.
При закрытии оптронного датчика 26 на входе блока управления 28 сформируется сигнал необходимого уровня, определяющего возникновение минимального, условно положительного, угла атаки +α1. Согласно знаку сформируется сигнал на включение электродвигателя 14 в направлении поворота каретки 3 с постоянной скоростью +ω1, величина которой будет соответствовать расстоянию L1 от исходного положения толкателя 8.
Таким образом, при возникновении минимального возмущающего сигнала ai на входе тканенаправителя и соответствующем повороте каретки 3 ротор электродвигателя 12, муфта 11, винт 10, гайка 9, толкатели 7 и 8 будут неподвижны, отображая сигнал возмущения α1 и обеспечивая коэффициент передачи K1.
Поворот каретки 3 будет происходить до тех пор, пока положение кромки ткани на входе не примет положение 1-1 /см. фиг. 2в/ между оптронными датчиками 23, 27 и 22, 26, характеризуя отсутствие возмущающего воздействия (α = 0o) и формируя соответствующий сигнал для останова электродвигателя 14.
При открытии оптронного датчика 26 /см. фиг. 2г/ на входе блока управления 28 сформируется сигнал необходимого уровня, определяющего возникновение минимального, условно отрицательного, угла атаки -α1, соответствующего смещению кромки в противоположном направлении. Согласно сформированному сигналу электродвигатель 14 осуществляет поворот каретки 3 в противоположном направлении с постоянной угловой скоростью (-ω1), величина которой будет определяться расстоянием L1 от оси регулируемого рычага 5 до исходного положения толкателя 8. Ротор электродвигателя 12, муфта 11, винт 10, гайка 9, толкатель 8 и толкатель специальной формы 7 будут также неподвижны, характеризуя тем самым минимальный сигнал возмущения α1 на входе и соответствующий коэффициент передачи K1
При увеличении сигнала возмущения до -α2 /см. фиг. 2д/, определяемого открытием оптронных датчиков 22 - 27, на входе блока управления 28 сформируется сигнал на включение электродвигателя 12. Ротор электродвигателя 14 будет продолжать вращаться в том же направлении, что и при отработке угла -α1. Вращение ротора электродвигателя 12 будет происходить до тех пор, пока не сработает конечный выключатель KB2 /см. фиг. 2д/. При этом увеличится коэффициент передачи до значения К2 и соответственно скорость отработки возмущающего воздействия до требуемой величины (-ω2).
По ходу движения материала вследствие поворота каретки 3 угол атаки - α2 ткани на входе примет значение -α1 /см. фиг. 2е/, т.е. закроет датчики 22 и 27. При этом блок управления 28 сформирует сигнал, обеспечивающий вращение ротора электродвигателя 12 в направлении, при котором винт 10 переместит гайку 9 с толкателями 7 и 8 до взаимодействия с конечным выключателем KB1 /см. фиг. 2/ цепи выключения двигателя. Коэффициент передачи при этом уменьшится до значения K1, и величина отработки возмущающего воздействия -α1 будет определяться угловой скоростью -ω1 поворота каретки 3.
При появлении технологического возмущения другого знака и величины, определяемых положением кромки материала относительно оптронных датчиков и их количеством, цикл работы тканенаправителя повторяется.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОРИЕНТАЦИИ ДВИЖУЩЕГОСЯ МАТЕРИАЛА ПО КРОМКЕ | 2001 |
|
RU2188789C1 |
| НАМОТОЧНОЕ УСТРОЙСТВО | 2001 |
|
RU2192379C1 |
| УСТРОЙСТВО ДЛЯ НАМОТКИ ДЛИННОМЕРНЫХ МАТЕРИАЛОВ НА ОПРАВКУ | 2000 |
|
RU2173664C1 |
| РАЗМОТОЧНОЕ УСТРОЙСТВО | 2001 |
|
RU2191152C1 |
| УСТРОЙСТВО ДЛЯ РАЗДУБЛИРОВАНИЯ СДВОЕННЫХ МАТЕРИАЛОВ | 2001 |
|
RU2192380C1 |
| УСТРОЙСТВО ДЛЯ РАВНЕНИЯ КРОМКИ РУЛОННОГО МАТЕРИАЛА | 1994 |
|
RU2078732C1 |
| УСТРОЙСТВО ДЛЯ РАВНЕНИЯ КРОМКИ ДВИЖУЩЕГОСЯ МАТЕРИАЛА | 1994 |
|
RU2078733C1 |
| СОСТАВ ДЛЯ ДУБЛЕНИЯ КОЖИ И МЕХА | 2001 |
|
RU2182178C1 |
| СОСТАВ ДЛЯ КРАШЕНИЯ КОЖИ | 2000 |
|
RU2182179C1 |
| СПОСОБ ПОЛУЧЕНИЯ ПОЛИМЕРНЫХ ПРОДУКТОВ ДЛЯ ОБРАБОТКИ КОЖ | 2000 |
|
RU2191787C2 |
Изобретение относится к легкой промышленности и может быть использовано для равнения движущегося текстильного материала по кромке при сматывании в рулон. Тканенаправитель содержит поворотную каретку, связанную с регулируемым рычагом посредством вилки и специальной формы толкателя, установленного соосно с толкателем на гайке, взаимодействующей с винтом, и получающего движение через муфту электродвигателя. Для контроля положения толкателя на регулируемом рычаге смонтированы концевые выключатели. Зацепление толкателя специальной формы с вилкой поворотной каретки осуществлено через непосредственное контактное взаимодействие, позволяющее обеспечивать только две степени свободы механизма и измерение передаточного отношения привода каретки в соответствии с законом изменения возмущающегося воздействия, что приводит к повышению качества равнения движущегося материала. 3 ил.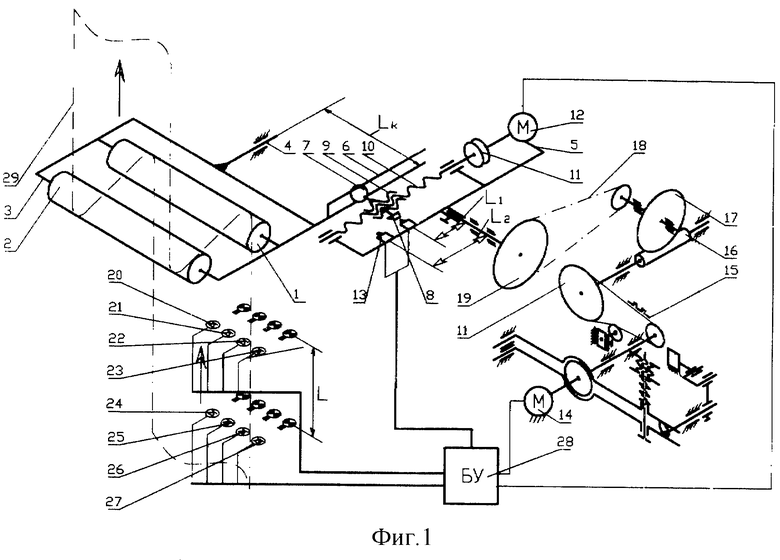
Тканенаправитель, содержащий два неподвижно закрепленных рабочих органа, смонтированных на поворотной каретке, привод поворота каретки, регулируемый рычаг, связанный с поворотной кареткой толкателем, оптронные датчики, следящие за положением кромки движущегося материала, и систему управления, отличающийся тем, что поверхность толкателя выполнена по форме тела вращения с обеспечением постоянного контактного взаимодействия с прорезью вилки каретки при изменении угла ее наклона, а регулируемый рычаг имеет привод для изменения передаточного отношения привода каретки в соответствии с законом изменения возмущающего воздействия.
| СОСТАВ ДЛЯ ПЕРФОРАЦИИ ПРОДУКТИВНЫХ ПЛАСТОВ | 1998 |
|
RU2139988C1 |
| УСТРОЙСТВО ДЛЯ РАВНЕНИЯ КРОМКИ ДВИЖУЩЕГОСЯ МАТЕРИАЛА | 1994 |
|
RU2078733C1 |
| УСТРОЙСТВО ДЛЯ РАВНЕНИЯ КРОМКИ РУЛОННОГО МАТЕРИАЛА | 1994 |
|
RU2078732C1 |
| СПОСОБ УСТРАНЕНИЯ КОСОГЛАЗИЯ | 2000 |
|
RU2212212C2 |
| РЕАКТОР-ГЕНЕРАТОР ДЛЯ ГОМОГЕННОГО ВОССТАНОВЛЕНИЯ КИСЛОРОДСОДЕРЖАЩЕГО СЕРНИСТОГО ГАЗА | 1998 |
|
RU2137706C1 |
| US 3570735 A, 16.03.1971. | |||
