Изобретение относится к области ракетной техники, а более конкретно к гироскопическим приборам, используемым на вращающихся по крену управляемых ракетах, например, в качестве гирокоординаторов, которые предназначены для преобразования сигналов управления ракетой из системы координат, связанной с пусковой установкой, в систему координат, связанную с вращающейся по крену ракетой.
Гирокоординатор представляет собой трехстепенной гироскоп с размещением оси наружной рамки вдоль оси вращающейся по крену ракеты. По оси наружной рамки, которая является измерительной, устанавливается датчик угла крена, а ось внутренней рамки является осью прецессии. При воздействии на гироскоп относительно наружной оси моментов внешних сил, а также при наличии углов разворота продольной оси ракеты ось ротора вместе с внутренней рамкой отклоняется вокруг оси прецессии от перпендикулярного к оси наружной рамки положения на большой угол, что приводит к ухудшению точности и потере работоспособности гироскопа.
Известен способ коррекции перпендикулярности оси ротора гироскопа и устройство для его осуществления [1], который заключается в определении направления и величины угла отклонения оси ротора от перпендикуляра к оси наружной рамки карданова подвеса, усилении в блоке электроники полученного сигнала об угле отклонения и создании момента коррекции по оси наружной рамки в пропорциональном режиме в соответствии с направлением отклонения.
Данный способ коррекции предъявляет высокие требования к выходным характеристикам датчика системы коррекции в части формы сигнала, его линейности во всем диапазоне рабочих углов, стабильности выходного параметра и, как следствие, не обеспечивает достаточной простоты реализации схемы управления моментом коррекционного двигателя.
В части устройства показана принципиальная конструктивная схема гироскопического прибора (силовой гирорамы), содержащего корпус, внутреннюю и наружную рамки карданова подвеса, ротор, потенциометрический датчик, включающий обмотку и упругий контакт (движок), электродвигатель и усилитель.
В этой конструкции гироскопического прибора потенциометрический датчик вырабатывает сигнал, пропорциональный углу поворота внутренней рамки (оси ротора), в соответствии с величиной и знаком которого электродвигатель создает момент силы по оси наружной рамки, приводящий ось ротора к перпендикулярному относительно оси наружной рамки положению.
Недостатком рассматриваемого устройства и соответственно указанного способа коррекции перпендикулярности оси ротора гироскопа является невысокая точность работы гироскопического прибора с обеспечением низкой надежности в условиях вибрационных и ударных возмущений из-за постоянного действия в процессе работы значительного момента со стороны потенциометрического датчика, обусловленного присутствием существенного трения между подвижной частью датчика и неподвижной: упругим контактом (движком) и обмоткой, и вызывающего уход наружной рамки от первоначального положения, а также наличия шума в выходном сигнале потенциометрического датчика, который появляется вследствие нарушения контакта между упругим контактом (движком) и обмоткой при действии вибрационных и ударных возмущений, причем амплитуда шума оказывается соизмеримой со значением полезного сигнала.
При этом происходящий в процессе эксплуатации гироскопического прибора износ трущихся элементов потенциометрического датчика ведет к засорению шарикоподшипниковых опор продуктами износа, что ухудшает точностные характеристики.
Кроме того, размещение элементов потенциометрического датчика на рамках карданова подвеса требует применения токопередающих скользящих контактов для передачи электрической энергии с корпуса на обмотку датчика и полезного сигнала с упругого контакта (движка) в обратном направлении, что приводит как к увеличению моментов трения по осям карданова подвеса, так и возникновению шумов в выходном сигнале датчика, а также усложняет конструкцию и увеличивает габариты прибора.
Из известных способов коррекции перпендикулярности оси ротора гироскопа и устройств для его осуществления наиболее близкими к предлагаемым по своей технической сущности являются способ, заключающийся в определении направления отклонения оси ротора от перпендикулярного к оси наружной рамки положения и использовании полученной информации для управления в постоянном (релейном) режиме моментом коррекционного двигателя по оси наружной рамки и гироскопический прибор [2], содержащий корпус, внутреннюю и наружную рамки карданова подвеса, ротор, ламельный датчик, включающий ламели и упругий контакт (щетку), коррекционный двигатель (рабочий механизм).
В данной конструкции гироскопического прибора при замыкании упругим контактом (щеткой) ламельного датчика одной из двух ламелей, в случае отклонения оси ротора от перпендикулярного к оси наружной рамки положения, коррекционный двигатель (рабочий механизм) создает момент, возвращающий ось ротора в исходное положение.
Указанный способ коррекции существенно более прост в реализации, поскольку отсутствует необходимость в определении величины угла отклонения и, как следствие, упрощает схему управления коррекционным двигателем. В рассматриваемом устройстве это достигается использованием для определения направления отклонения оси ротора ламельного датчика, имеющего простую конструкцию.
Кроме того, требования, предъявляемые данным способом коррекции к выходным характеристикам датчика системы коррекции, невысоки, так как для управления моментом коррекционного двигателя необходимо получать и различать на выходе датчика лишь два, причем, устойчивых состояния, значительно отличающихся друг от друга по уровню снимаемого сигнала, что повышает надежность работы в условиях вибрационных и ударных возмущении.
Также в ламельном датчике трение между его взаимодействующими элементами: упругим контактом (щеткой) и ламелью, несколько ниже за счет возможности получения высокой чистоты контактирующей поверхности ламели.
Однако применение указанного способа коррекции перпендикулярности оси ротора гироскопа и устройства, реализующего данный способ, на вращающихся по крену управляемых ракетах также не позволяет получить высокую точность работы гироскопического прибора с обеспечением достаточной надежности в условиях вибрационных и ударных возмущений из-за постоянного действия со стороны ламельного датчика момента, обусловленного присутствием трения между подвижной частью датчика и неподвижной: упругим контактом (щеткой) и ламелями, и вызывающего уход наружной рамки от первоначального положения, и из-за искажения информации с ламельного датчика в случае нарушения контакта между упругим контактом (щеткой) и ламелями при действии вибрационных и ударных возмущении, что приводит к прохождению ложных команд на отключение или переключение направления действия момента коррекционного двигателя.
Кроме того, использование рассматриваемого способа коррекции и гироскопического прибора на вращающихся по крену управляемых ракетах делает необходимым применение значительного количества токопередающих скользящих контактов для передачи электрических сигналов с корпуса на наружную и внутреннюю рамки, где размещены элементы ламельного датчика, и обратно, что вызывает увеличение моментов трения по осям карданова подвеса и появление дополнительных источников искажения полезного сигнала датчика системы коррекции при вибрационных и ударных возмущениях.
При этом использование упругих токоподводов с целью передачи электрических сигналов непосредственно с вращающегося корпуса на датчик системы коррекции, обеспечивающих работу лишь на малых углах поворота подвижных узлов гироскопического устройства и приводящих к появлению моментов тяжения токоподводов по осям карданова подвеса, неприемлемо в гироскопах вращающихся по крену управляемых ракет.
Элементы ламельного датчика (упругий контакт, ламели), токопередающих скользящих контактов (щетки, контактные кольца) подвержены износу при проведении проверочных и приемо-сдаточных испытаний в процессе сборки гироскопического прибора, при работе в составе вращающейся по крену управляемой ракеты, что ведет к загрязнению шарикоподшипниковых опор продуктами износа и, следовательно, к увеличению моментов трения и ухудшению точностных характеристик.
Следует отметить, что расположение ламельного датчика на рамках карданова подвеса усложняет конструкцию и увеличивает габариты гироскопического прибора.
Изобретение актуально в связи с тем, что требования к основным выходным характеристикам гироскопических приборов, в частности точности измерения углов, надежности работы, постоянно повышаются в условиях возрастания воздействия ударных, вибрационных и других возмущений вследствие увеличения сложности решаемых управляемыми ракетами задач (увеличение дальности работы, скоростей, углов разворота.), ограничения массо-габаритных характеристик и требований по простоте конструкции и изготовления.
Задачей предлагаемого изобретения является повышение точности гироскопического прибора путем значительного уменьшения величины ухода наружной рамки карданова подвеса за счет снижения моментов трения в контуре системы коррекции с обеспечением достаточной надежности гироскопического прибора в условиях вибрационных и ударных возмущений с одновременным упрощением конструкции.
Для достижения поставленной задачи в способе коррекции перпендикулярности оси ротора гироскопа вращающейся по крену управляемой ракеты, заключающемся в определении направления отклонения оси ротора от перпендикуляра к оси наружной рамки карданова подвеса и использовании полученной информации для управления моментом коррекционного двигателя:
- направление отклонения оси ротора определяют дискретно во времени с частотой опроса, кратной частоте вращения ракеты;
- полученную информацию о направлении отклонения оси ротора запоминают в паузах между опросами.
Для достижения поставленной задачи в гироскопическом приборе вращающейся по крену управляемой ракеты, состоящем из корпуса, внутренней и наружной рамок карданова подвеса, ротора, датчика направления отклонения внутренней рамки, включающего ламели и упругий контакт, коррекционного двигателя и электронного блока системы коррекции:
- датчик направления отклонения внутренней рамки выполнен в виде трех плоских и параллельных друг другу ламелей;
- ламели размещены на изоляционной плате и установлены тангенциально на внутренней поверхности корпуса, симметрично относительно плоскости, проходящей перпендикулярно оси наружной рамки через центр карданова подвеса;
- продольная ось симметрии средней ламели совпадает с плоскостью, проходящей перпендикулярно оси наружной рамки через центр карданова подвеса;
- упругий контакт выполнен в виде U-образного контакта-перемычки;
- закреплен на конце оси внутренней рамки симметрично относительно плоскости, проходящей перпендикулярно оси наружной рамки через ось вращения ротора, с размещением точек контактирования относительно места крепления по направлению вращения корпуса;
- ламели установлены на корпусе с возможностью пересечения их окружностями, образованными точками контактирования U-образного контакта-перемычки в плоскостях, перпендикулярных оси наружной рамки.
Сущностью данного предлагаемого изобретения в части способа является определение направления отклонения оси ротора от перпендикуляра к оси наружной рамки карданова подвеса во время вращения ракеты в течение минимально коротких интервалов времени опроса, минимально требуемое количество раз за период вращения и запоминание полученной информации на значительно большие интервалы времени для использования в управлении коррекционным двигателем.
Сущностью данного предлагаемого изобретения в части устройства является максимально возможное исключение вредных моментов, вносимых в гироскопический прибор датчиком системы коррекции и вызывающих уход рамок карданова подвеса, и сведение к минимуму возможности искажения полезного сигнала датчика системы коррекции, за счет исключения необходимости передачи электрических сигналов с вращающегося корпуса прибора на наружную и внутреннюю рамки карданова подвеса и в обратном направлении, обеспечения минимально необходимого для получения информации с датчика времени взаимодействия подвижной его части с неподвижной при вращении корпуса прибора.
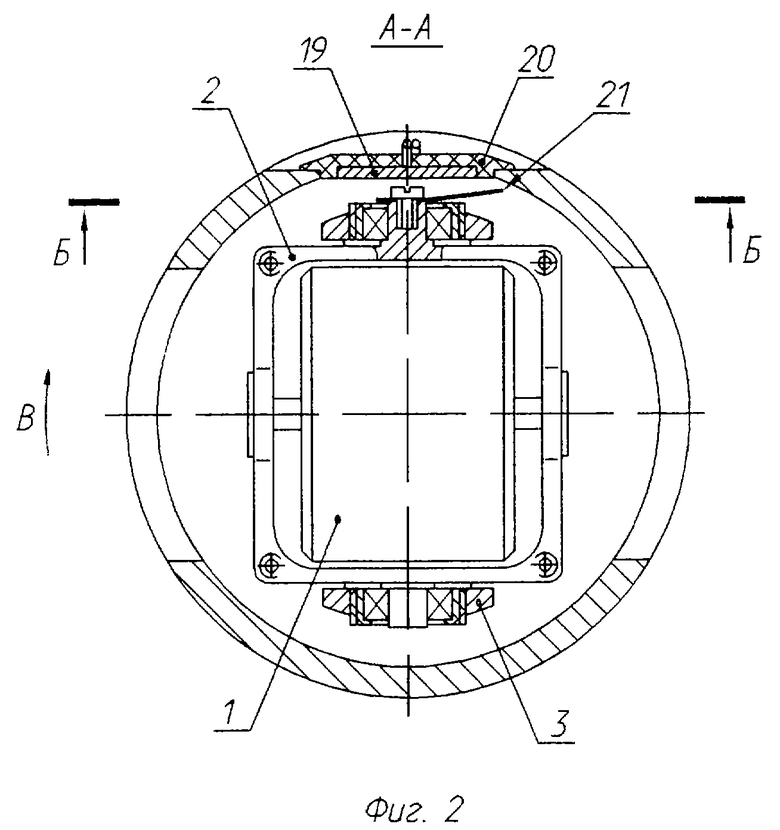
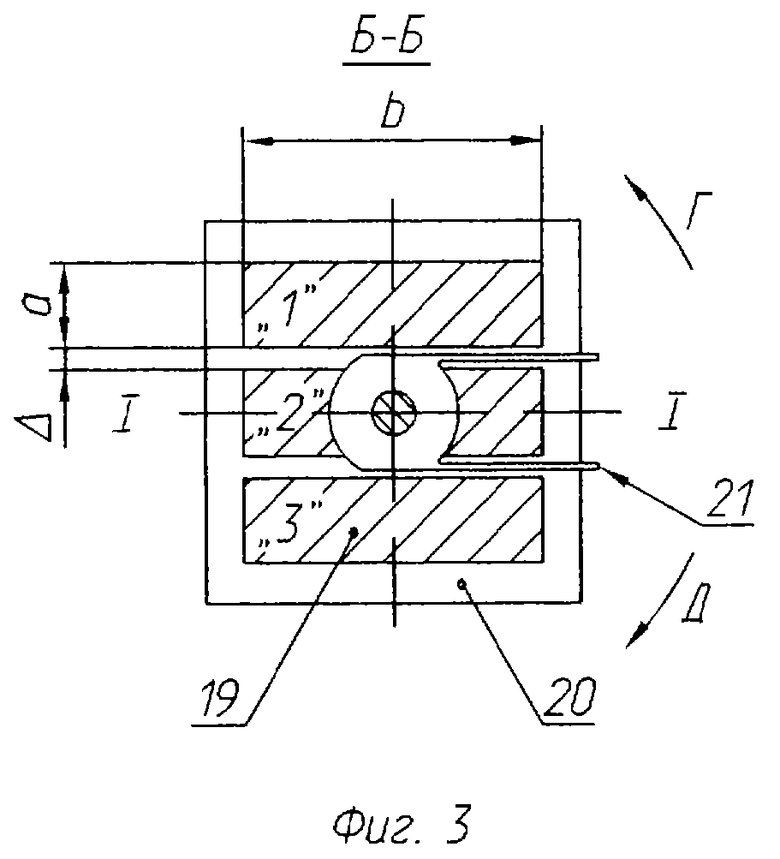
На фиг. 1 показан предлагаемый гироскопический прибор, общий вид, на фиг. 2 разрез А-А на фиг. 1, на фиг. 3 увеличенный разрез Б-Б на фиг. 2.
Гироскопический прибор содержит ротор 1 (фиг. 1) в кардановом подвесе, образованном внутренней 2 и наружной 3 рамками, установленный посредством фланцев 4 и 5 в цилиндрическом корпусе 6, оптронный датчик угла крена 7, расположенный по оси наружной рамки 3, коррекционный двигатель 8, также расположенный по оси наружной рамки 3 с противоположной от оптронного датчика угла крена 7 стороны, электронный блок системы коррекции 9, который установлен совместно с печатной платой 10 во фланце 5.
Оптронный датчик угла крена 7 состоит из фотодиода 11 и излучающего диода 12, размещенных в отверстиях корпуса датчика 13, установленного в цилиндрический корпус 6 гироскопического прибора, и растра 14, закрепленного на оси наружной рамки 3.
Коррекционный двигатель 8 представляет собой асинхронный двигатель переменного тока и состоит из статора 15, чья обмотка уложена в катушки 16, и короткозамкнутого ротора 17, обмотка которого выполнена в виде "беличьего колеса".
По оси внутренней рамки 2 расположен датчик направления отклонения 18, три ламели 19 (фиг. 2, 3) которого размещены параллельно с небольшим зазором (Δ =0,3-0,5 мм) друг от друга на изоляционной плате 20. Ламели 19 с изоляционной платой 20 установлены тангенциально на внутренней поверхности цилиндрического корпуса 6 симметрично относительно плоскости I-I (фиг. 1, 3), проходящей перпендикулярно оси наружной рамки 3 через центр карданова подвеса гироскопа, причем продольная ось симметрии средней из трех ламелей 19 совпадает с этой плоскостью, и обращены контактными поверхностями внутрь цилиндрического корпуса 6, образуя таким образом плоскость, перпендикулярную оси вращения внутренней рамки 2. Ширину "а" ламелей 19 выбирают из условия обеспечения работоспособности датчика 18 в заданном диапазоне углов отклонения оси ротора от перпендикуляра к наружной рамке 3. Как правило, величина этого диапазона одинакова (симметрична) в обоих направлениях относительно перпендикулярного положения, поэтому ламели 19 выполняют одинаковой ширины. Длина "b" ламелей 19 должна быть достаточной, чтобы обеспечить необходимую для надежной работы системы коррекции зону контактирования с упругим контактом-перемычкой 21.
Упругий контакт-перемычка 21 (фиг. 2, 3) выполнен U-образным, с охватом средней из трех ламелей 19, закреплен на конце оси внутренней рамки 2 симметрично плоскости, проходящей перпендикулярно оси наружной рамки 3 через ось вращения ротора 1, благодаря чему каждая из его лапок точно отображает положение оси ротора 1 в пространстве. При этом точки контактирования U-образного контакта-перемычки 21 с ламелями 19 смещены на некоторое расстояние относительно места его крепления на внутренней рамке 2, что дает возможность получать величину зоны контактирования с ламелями 19 и усилия поджатия к ним в требуемом для надежной работы системы коррекции диапазоне, одновременно решая задачу по обеспечению работоспособности датчика 18 при возможно больших углах отклонения оси ротора 1 от перпендикуляра к оси наружной рамки 3, и обеспечивает плавное нарастание до максимума усилия поджатия в первую половину фазы взаимодействия U-образного контакта-перемычки 21 с ламелями 19, а затем его плавное уменьшение до нуля, что, в свою очередь, способствует демпфированию колебаний лапок U-образного контакта-перемычки 21, которые возникают при вибрационных и ударных воздействиях.
Кроме того, смещение точек контактирования U-образного контакта-перемычки 21 произведено по направлению вращения цилиндрического корпуса 6 (по стрелке В), что позволяет получить, при прочих равных условиях, меньшую величину возмущающего момента по оси внутренней рамки 2 за счет исключения возможности встречного взаимодействия торцев лапок U-образного контакта перемычки 21 с микронеровностями на поверхностях ламелей 19, с выступами, которые, как правило, присутствуют на практике при размещении ламелей 19 на изоляционной плате 20, например, вследствие неслияния их поверхностей, а также более высокую надежность работы датчика 18 и гироскопического прибора в целом, поскольку исключает как возможность упругой деформации лапок U-образного контакта-перемычки 21 в продольном направлении, приводящую к последующему отскоку их от поверхностей ламелей 19 и, как следствие, потере контакта, так и повышенный износ ламелей 19 и U-образного контакта-перемычки 21 в результате срезания с их поверхностей микронеровностей с последующим загрязнением шарикоподшипниковых опор гироскопического прибора продуктами износа, которые имеют место при встречном взаимодействии.
С функциональной точки зрения целесообразно изоляционную плату 20 (фиг. 2) с ламелями 19 располагать по оси внутренней рамки 2 напротив места крепления U-образного контакта-перемычки 21, так как в этом случае в процессе работы гироскопического прибора в составе вращающейся по крену управляемой ракеты уже при небольшом начальном угле поворота цилиндрического корпуса 6 (5-15o) произойдет взаимодействие U-образного контакта-перемычки 21 с ламелями 19 и будет получена информация о положении оси ротора 1 относительно оси наружной рамки 3. Кроме того, это упрощает настройку и дает возможность реализовать без дополнительных усложнений электрической схемы простую характеристику управления моментом коррекционного двигателя 8 - постоянную (релейную) с зоной гистерезисности, и, как следствие, получить выигрыш в надежности и габаритах электронного блока системы коррекции 9.
Электрические провода, соединяющие ламели 19 с электронным блоком системы коррекции 9, уложены в пазу цилиндрического корпуса 6 и через отверстия во фланце 5 выведены на печатную плату 10. Обмотка статора 15 коррекционного двигателя 8 посредством электрических проводов, также проведенных через отверстия во фланце 5 на печатную плату 10, соединена с электронным блоком системы коррекции 9.
Доступ к электромонтажу на печатной плате 10 закрыт крышкой 22, закрепленной на фланце 5.
Гироскопический прибор работает следующим образом. Перед пуском вращающейся по крену управляемой ракеты производится разарретирование гироскопического прибора, в результате чего ротор 1 раскручивается и приобретает гироскопические свойства, затем питание от бортового источника подается на оптронные элементы датчика угла крена 7, электронный блок системы коррекции 9, который, в свою очередь, запитывает обмотку статора 15 коррекционного двигателя 8, и через небольшой промежуток времени осуществляется пуск ракеты. Во время вращения цилиндрического корпуса 6 прибора по стрелке В вместе с управляемой ракетой относительно сохраняющего свои свойства гироскопа происходит периодическое, в пределах выставленной при сборке зоны контактирования взаимодействие U-образного контакта-перемычки 21 с ламелями 19 датчика 18. При отклонении оси ротора 1 от перпендикуляра к оси наружной рамки 3 в одну или другую сторону происходит поворот U-образного контакта-перемычки 21 по стрелке Г или Д. Тогда в случае поворота по стрелке Г при контактировании с датчиком 18 им замыкаются между собой ламели "1" - "2", а при повороте по стрелке Д ламели "2" - "3". В соответствии с комбинацией замыкания ламелей электронный блок системы коррекции 9 формирует направление действия момента, создаваемого коррекционным двигателем 8 вокруг оси наружной рамки 3 и приводящего ось ротора 1 к перпендикулярному положению. По окончании фазы взаимодействия U-образного контакта-перемычки 21 с ламелями 19 датчика 18 в электронном блоке системы коррекции 9 запоминается информация о комбинации замкнутых между собой ламелей и в соответствии с ней сохраняется направление действия момента коррекционного двигателя 8 до следующего опроса положения оси ротора 1. Для повышения частоты опроса и, следовательно, надежности работы системы коррекции, особенно в условиях вибрационных и ударных возмущении, по окружности цилиндрического корпуса 6 можно устанавливать несколько изоляционных плат 20 с ламелями 19.
Во время движения ракеты на траектории и, что особенно важно, при совершении ею сложного маневра, происходит удержание оси ротора 1 в перпендикулярном относительно оси наружной рамки 3 положении, благодаря чему сохраняется работоспособность гироскопического прибора в течение всего полета и наиболее полно используются силовые свойства быстровращающегося ротора 1. При этом влияние вредных моментов, действующих со стороны системы коррекции по оси прецессии и вызывающих уход наружной рамки 3 от первоначального положения, сведено к минимуму. По оси же наружной рамки 3 установлен оптронный датчик угла крена 7, с которого снимается электрический сигнал, поступающий в блок электронной аппаратуры и использующийся для управления движением ракеты.
Следует отметить, что в предлагаемом гироскопическом приборе информация о направлении отклонения оси ротора 1, получаемая с помощью единственного U-образного контакта-перемычки 21, может быть передана в цифровой форме в виде сигналов, соответствующих устойчивым логическим состояниям ("1" и "0"), и легко защищается от шумов электронным блоком системы коррекции 9, например блокировкой полезного сигнала с датчика 18 триггером в первый же момент контактирования с ламелями 19.
Таким образом, совокупность признаков предлагаемого гироскопического прибора повышает точность работы путем уменьшения величины ухода наружной рамки карданова подвеса с обеспечением достаточной надежности за счет исключения необходимости передачи электрических сигналов с вращающегося корпуса прибора на наружную и внутреннюю рамки карданова подвеса и в обратном направлении для получения информации об отклонении оси ротора от перпендикуляра к оси наружной рамки, что позволяет значительно снизить суммарную величину возмущающих моментов по осям карданова подвеса и практически полностью исключить возможность искажения полезного сигнала датчика направления отклонения при вибрационных и ударных возмущениях, а также за счет обеспечения минимально необходимого для получения информации с датчика направления отклонения времени взаимодействия U-образного контакта-перемычки с ламелями при вращении корпуса прибора, что уменьшает среднее значение момента трения по оси внутренней рамки, являющейся осью прецессии.
При этом совокупность признаков предлагаемого гироскопического прибора позволяет выполнить устройство простым в настройке, без сложного электромонтажа и в небольших габаритах, что, в свою очередь, создает возможность более эффективно проводить компоновку управляемой ракеты и увеличивать ее боекомплект.
Кроме того, U-образный упругий контакт-перемычка вследствие смещения его точек контактирования относительно места крепления на внутренней рамке по направлению вращения корпуса не взаимодействует при нахождении гироскопического прибора в заарретированном состоянии с ламелями датчика направления отклонения и, следовательно, не испытывает напряжений от упругой деформации, в результате чего сохраняется в период хранения гироскопического прибора стабильным выставленное усилие поджатия, исключается возможность образования окисных пленок вокруг точек контактирования в процессе длительного хранения и, как следствие, появляется возможность применять для изготовления элементов датчика направления отклонения (U-образного контакта-перемычки, ламелей) менее дорогостоящие, широко используемые материалы и покрытия.
Следует отметить также, что происходящий в процессе проводимых при сборке гироскопического прибора проверочных и приемо-сдаточных испытаний, при работе в составе вращающейся по крену управляемой ракеты износ единственного U-образного контакта-перемычки и поверхностей ламелей датчика направления отклонения крайне незначителен вследствие обеспечения небольшой зоны контактирования их друг с другом и наличия при этом небольшого усилия поджатия, размещения точек контактирования U-образного контакта-перемычки относительно места его крепления на внутренней рамке на некотором расстоянии по направлению вращения корпуса, что способствует сохранению точностных характеристик прибора.
Источники информации
1. Павлов В.А. Теория гироскопа и гироскопических приборов. - Л: Судостроение, 1964, с.433, рис. 191.
2. Бабаева Н.Ф. и др. Детали и элементы гироскопических приборов. - Л: Судостроение, 1962 г., с. 266, рис. V.1, г.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИРОСКОПИЧЕСКИЙ ПРИБОР | 2003 |
|
RU2239788C1 |
| ГИРОСКОПИЧЕСКИЙ ПРИБОР | 2002 |
|
RU2217699C2 |
| ГИРОСКОПИЧЕСКИЙ ПРИБОР (ВАРИАНТЫ) | 1998 |
|
RU2155324C1 |
| ГИРОСКОПИЧЕСКИЙ ПРИБОР | 1998 |
|
RU2141623C1 |
| ГИРОСКОПИЧЕСКИЙ ПРИБОР | 2000 |
|
RU2179302C1 |
| ГИРОСКОПИЧЕСКИЙ ПРИБОР | 2000 |
|
RU2176779C1 |
| СИСТЕМА УПРАВЛЕНИЯ САМОНАВОДЯЩИМСЯ ВРАЩАЮЩИМСЯ СНАРЯДОМ | 2001 |
|
RU2210717C2 |
| ГИРОСКОПИЧЕСКИЙ ПРИБОР | 1999 |
|
RU2180728C2 |
| ГИРОСКОПИЧЕСКИЙ ПРИБОР И СПОСОБ РЕГУЛИРОВКИ ЕГО ДРЕЙФА | 1996 |
|
RU2114394C1 |
| ГИРОСКОПИЧЕСКИЙ ПРИБОР | 2010 |
|
RU2416069C1 |
Способ и прибор предназначены для использования на вращающихся по крену управляемых ракетах, например, в качестве гирокоординаторов. Технический результат - повышение точности гироскопического прибора с обеспечением достаточной надежности в условиях вибрационных и ударных возмущений с одновременным упрощением конструкции. Направление отклонения оси ротора определяют дискретно во времени с частотой опроса, кратной частоте вращения ракеты. Полученную информацию о направлении отклонения оси ротора запоминают в паузах между опросами. Датчик направления отклонения внутренней рамки выполнен в виде трех плоских и параллельных друг другу ламелей. Ламели размещены на изоляционной плате и установлены тангенциально на внутренней поверхности корпуса симметрично относительно плоскости, проходящей перпендикулярно оси наружной рамки через центр карданова подвеса. Продольная ось симметрии средней ламели совпадает с плоскостью, проходящей перпендикулярно оси наружной рамки через центр карданова подвеса. Упругий контакт выполнен в виде U-образного контакта-перемычки и закреплен на конце оси внутренней рамки симметрично относительно плоскости, проходящей перпендикулярно оси наружной рамки через ось вращения ротора, с размещением точек контактирования относительно места крепления по направлению вращения корпуса. Ламели установлены на корпусе с возможностью пересечения их окружностями, образованными точками контактирования U-образного контакта-перемычки в плоскостях, перпендикулярных оси наружной рамки. 2 с.п. ф-лы, 3 ил.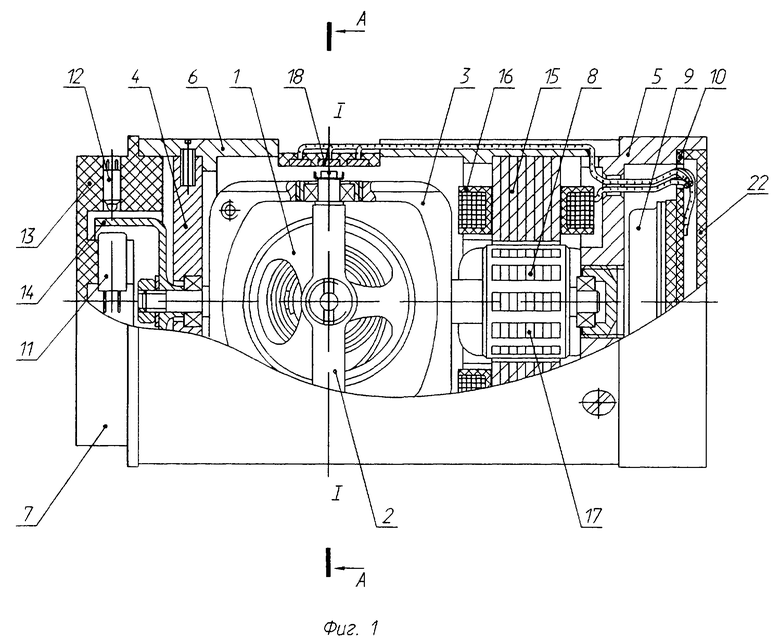
| Бабаева Н.Ф | |||
| и др | |||
| Детали и элементы гироскопических приборов | |||
| - Л.: Судостроение, 1962, с.266 | |||
| ГИРОСКОПИЧЕСКИЙ ПРИБОР И СПОСОБ РЕГУЛИРОВКИ ЕГО ДРЕЙФА | 1996 |
|
RU2114394C1 |
| US 3453895, 08.07.1969. | |||
