Изобретение относится к области гироскопических приборов, которые используются в качестве датчика угла пеленга на противотанковых вращающихся по крену управляемых ракетах.
У таких гироскопов ось вращения ротора в исходном положении совпадает с продольной осью вращающейся по крену ракеты и кардановый подвес ротора гироскопа вращается вместе с корпусом, а при движении по траектории между осью вращения ротора и продольной осью вращающейся ракеты появляется угол пеленга. Для рассматриваемого класса приборов на малогабаритных ракетах используются импульсные гироскопы, обеспечивающие разгон ротора от какого-либо источника энергии за доли секунды и затем работающие на выбеге. Это обеспечивает практически постоянную готовность ракеты к пуску. Одним из основных требований, предъявляемых к таким гироскопам, является небольшой дрейф (прецессия, уход), который зависит от многих факторов. К основным из них можно отнести моменты, вызванные разбалансом относительно осей вращения ротора и карданового подвеса, инерционные моменты рамок карданового подвеса, моменты трения в опорах, момент аэродинамического сопротивления вращению ротора в окружающей среде.
Известна конструкция [1] гироскопического устройства, гирогоризонта, со встроенным коррекционным мотором, вызывающим прецессию к вертикали. Данное устройство представляет собой трехстепенной гироскоп с внешним кардановым подвесом. Недостатком такого гироскопического прибора является низкая точность при его использовании на вращающихся по крену ракетах в связи с необходимостью вращения карданового подвеса, что вызывает появление значительных, не поддающихся компенсации инерционных моментов рамок карданового подвеса.
Известен способ [2] уменьшения дрейфа гироскопа заключающийся в статическом уравновешивании (балансировке) трехстепенного гироскопа на специальном стенде, работающем в режиме одноосного гиростабилизатора. Уравновешивание по каждой из осей производится отдельно, а одновременная проверка качества уравновешивания осуществляется на неподвижном основании. Недостатком такого способа является низкая точность регулировки дрейфа из-за несоответствия условий регулировки реальным условиям работы и частичной компенсации дрейфа гироскопа, вызванного только неуравновешенностью.
Известна [3] конструкция гироскопического прибора, которая по технической сути является наиболее близким аналогом (прототипом). Гироскопический прибор представляет собой составной ротор на внутреннем кардановом подвесе. Ротор состоит из массивного сферического полого обода и ввинченной в него соосной конической опоры ротора, на которой размещена газовая турбина. Во внутренней полости ротора размещен кардановый подвес в виде крестовины и охватывающей ее двух ортогональных вилок с подшипниковыми опорами, на одной из вилок выполнена ось опоры ротора, а другая вилка установлена на корпусе. Регулировочная гайка, предназначенная для балансировки, размещена внутри обода на резьбе, где также на подвесе размещен датчик угла. Недостатком данной конструкции является большой дрейф гироскопа, вызванный массивностью ротора и отсутствием конструктивных элементов для его компенсации. Кроме того, на уменьшение точности оказывают влияние сборная конструкция ротора и газовая турбина, размещенная на роторе.
Известен наиболее близкий по технической сути способ регулировки дрейфа [1] гироскопа, являющийся прототипом, который заключается в его балансировке относительно осей вращения ротора и карданового подвеса, разгоне ротора и проверке дрейфа на подвижном основании с отклонением его на угол в плоскости измерений. Недостатком данного способа является то, что он не обеспечивает высокой точности регулировки дрейфа из-за его регулировки в условиях, которые не соответствуют реальным, с вращением карданового подвеса на рабочей частоте вращения и не обеспечивает компенсацию дрейфа при одновременном воздействии инерционных моментов вращающегося подвеса, разбаланса вдоль оси ротора, трения в опорах подвеса и моментов по оси вращения ротора, создаваемых сопротивлением при его вращении по инерции.
Задача изобретения - увеличение точности гироскопа на внутреннем вращающемся кардановом подвесе за счет уменьшения его дрейфа.
Для достижения поставленной задачи в гироскопическом приборе для вращающейся по крену ракеты, содержащим ротор на внутреннем кардановом подвесе со смещенной от центра масс по его оси опорой ротора, регулировочную гайку, корпус, датчик угла и разгонное устройство ротор выполнен в виде диска с балансировочными винтами на его периферии со смещенной относительно его центра масс соосной цилиндрической втулкой с наружной резьбой и центральной полостью в зоне диска, в которых размещены соответственно опора ротора и внутренний кардановый подвес, центр масс диска смещен от центра карданового подвеса в сторону, противоположную опоре ротора, в зоне торцевой поверхности ротора с противоположной стороны от втулки на корпусе установлен, закреплен соосно ротору аэродинамический диск в виде усеченного конуса с вершиной в сторону ротора и зафиксирован со смещением относительно ротора на регулируемом упоре, размещенном на корпусе, разгонное устройство подсоединено к ротору разъемным соединением и обеспечивает направление вращения в противоположную сторону относительно вращения корпуса с кардановым подвесом, на втулке ротора размещена и зафиксирована регулировочная гайка.
В частном случае в гироскопическом приборе конусообразный аэродинамический диск установлен на резьбовом выступе корпуса и поджат к упору посредством резьбового соединения, разгонное устройство выполнено в виде газовой турбины с направлением движущего момента встречно вращению корпуса, конусообразный аэродинамический диск установлен на гладком выступе корпуса и поджат пружиной к упору в сторону действия ускорения от разгона ракеты.
В способе регулировки дрейфа гироскопического прибора для вращающейся по крену ракеты, заключающимся в его балансировке относительно осей вращения ротора и карданового подвеса, разгоне и проверке дрейфа на подвижном основании с отклонением его на угол в плоскости измерений при проверке и регулировке дрейфа корпус с кардановым подвесом вращают встречно ротору, одновременно проверяют дрейф в горизонтальной и вертикальной плоскостях, в горизонтальной плоскости компенсируют дрейф смещением центра масс гироскопа посредством перемещения регулировочной гайки по втулке ротора на величину Δ1 от центра карданового подвеса, величину Δ1 выбирают из соотношения
Δ1= (Isω2sinθ-PдLд+PвLв)/Pбг, (1)
где Δ1 - величина смещения центра масс регулировочной гайки от центра карданового подвеса;
Is - суммарный момент инерции карданового подвеса;
ω - угловая скорость вращения корпуса;
θ - угол пеленга;
Pд - масса диска;
Lд - расстояние от центра масс диска до центра подвеса;
Pв - масса втулки;
Lв - расстояние от центра масс втулки до центра подвеса;
Pбг - масса регулировочной гайки;
дрейф по вертикали компенсируют смещением относительно ротора аэродинамического диска на величину Δ2;
величину Δ2 выбирают из соотношения
Δ2= (kанMarанsinθ/Mтр)1/2, (2)
где Δ2 - величина смещения усеченной вершины конуса аэродинамического диска от торцевой поверхности ротора;
Kан - коэффициент аэродинамической несимметрии, учитывающий влияние на изменение угла пеленга момента, вызванного взаимодействием с ротором обтекающей его среды;
Mа - момент аэродинамического сопротивления вращению ротора;
rан - плечо приложения силы от аэродинамической несимметрии;
Mтр - момент сил трения в опорах подвеса.
Предлагаемая конструкция гироскопического прибора и способ регулировки его дрейфа позволяют проводить регулировку дрейфа как в горизонтальной, так и в вертикальной плоскостях. Смещение центра масс гироскопа от центра карданового подвеса по направлению вектора вращения корпуса (карданового подвеса) создает момент от разбаланса, который направлен встречно инерционному моменту. Это характерно для рассматриваемого класса гироскопов, используемых на управляемых ракетах, движущихся по траектории, близкой к баллистической или настильной, имеющей начальный угол выстреливания по тангажу. При равенстве этих моментов дрейф в горизонтальной плоскости близок к нулю. В вертикальной плоскости при направлении вращения ротора и карданового подвеса в разные стороны происходит уравновешивание дрейфа гироскопа от момента трения в опорах подвеса и от момента, вызванного созданием аэродинамической несимметрии.
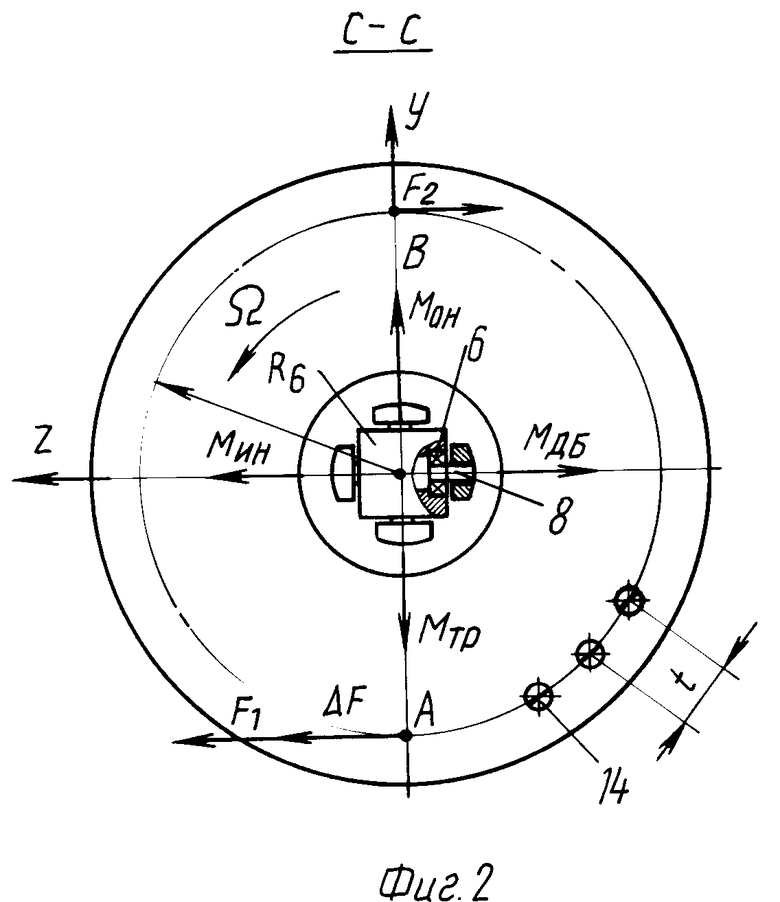
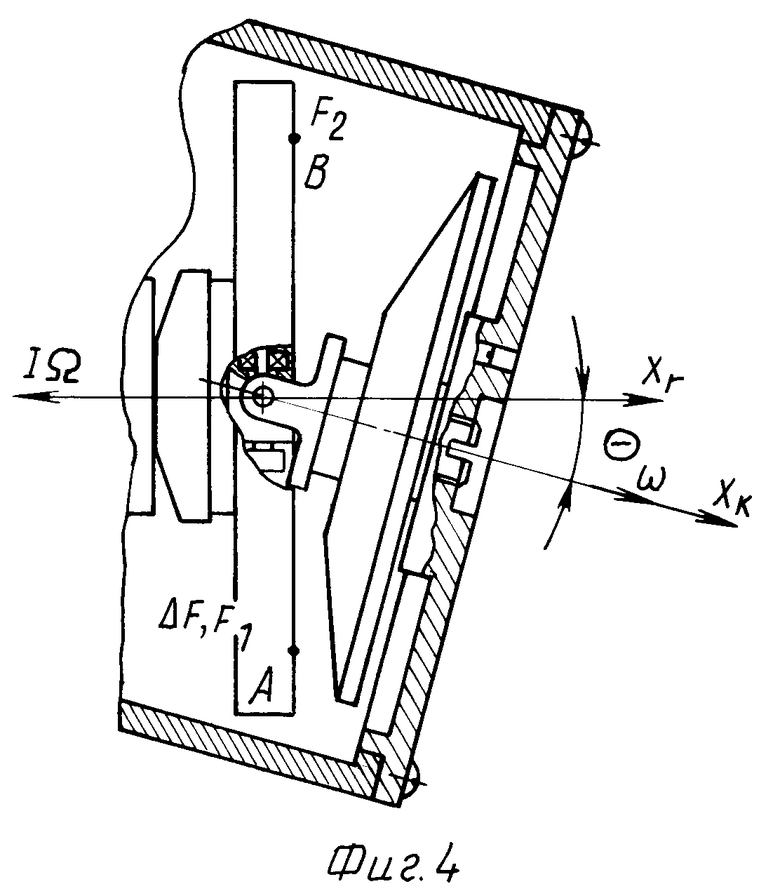
Общий вид гироскопического прибора показан на фиг. 1, на фиг. 2 - сечение С-С фиг. 1, проходящее по ротору через центр карданового подвеса; на фиг. 3 - вариант установки аэродинамического диска возле торца ротора фиг. 1; на фиг. 4 - конструктивная схема гироскопа при измерении дрейфа.
Ротор 1 в виде диска (фиг. 1) посредством втулки Д установлен на подшипниковой опоре 2, размещенной на цапфе Е вилки 3, которую совместно с вилкой 4 корпуса 5 объединяет крестовина 6 (фиг. 2) посредством шарикоподшипников 7 и полуосей 8. На цилиндрическом резьбовом выступе корпуса 5 (фиг. 1) установлен аэродинамический диск 9, который при развороте корпуса 5 на угол пеленга θ приближается к ротору в зоне А и удаляется от ротора в зоне B (фиг. 4). Для компенсации разбаланса гироскопа от смещения втулки центр масс диска смещен на величину Lд от центра карданового подвеса. На резьбовой поверхности втулки Д ротора 1 размещена балансировочная гайка 10. Для измерения угла пеленга ракеты предусмотрен на корпусе 5 датчик угла, состоящий из светодиода 11 и фотодиода 12, который выдает фототок, соответствующий изменению светового потока светодиода, отраженного от зеркала 13, закрепленного на торце ротора 1. На периферии диска ротора 1 по окружности с радиусом R6 и шагом t установлены балансировочные винты 14 (фиг. 2), обеспечивающие уравновешивание ротора относительно его оси вращения X.
Выполнение ротора в виде диска обеспечивает при небольшом весе ротора получение значительной маховой массы, что снижает момент трения в опорах ротора и подвеса. Балансировка диска винтами, размещенными по окружности на его периферии, обеспечивает необходимую точность балансировки диска относительно оси вращения ротора. Все указанные признаки позволяют снизить дрейф гироскопического прибора.
Гироскопический прибор работает следующим образом.
Разгон ротора осуществляется внешней газовой турбиной 15, момент от которой прикладывается через разъемное соединение 16 к втулке Д по оси ротора X. После разгона турбина отделяется от ротора за счет свинчивания разъемного соединения 16 с цапфы E ротора и гироскоп становится свободным. При развороте ракеты на угол θ ее угловое положение относительно оси ротора гироскопа регистрируется фотодиодом 12, который выдает на частоте вращения ротора импульсы, амплитуда которых пропорциональна изменению отраженного от зеркала 13 светового потока светодиода 11.
Способ регулировки дрейфа осуществляется следующим образом. Вначале производится балансировка ротора относительно его оси собственного вращения. Для выбранной формы ротора в виде диска приемлем статический вид балансировки посредством удаления или замены винтов 14 на ободе ротора. Балансировка ротора относительно центра карданового подвеса по оси X достигается за счет перемещения гайки 10 вдоль оси X. После балансировки гироскопический прибор размещается на установке типа УПГ-48, которая может обеспечить вращение корпуса 5 относительно оси X и разворот его относительно центра карданового подвеса на угол θ . Затем по стрелке L к лункам турбины 15 подводится сжатый воздух посредством трубопровода и ротор разгоняется до требуемых оборотов, которые контролируются по импульсам фототока фотодиода. После разгона ротора по направлению IΩ (фиг. 4) и отклонения вращающегося с угловой скоростью ω корпуса на угол пеленга θ измеряется дрейф гироскопа, вызванный действием внешних моментов, регистрируемый фотодиодом 12, который выдает на частоте вращения ротора импульсы, их амплитуда пропорциональна изменению отраженного от зеркала 13 светового потока светодиода 11. В процессе регулировки происходит следующее:
в горизонтальной плоскости ZX (фиг. 2) на гироскоп воздействуют инерционный момент Mин= Isω2sinθ [4] и компенсирующий его момент от разбаланса, создаваемый балансировочной гайкой 10, Mдб= Δ1Pбг. . При равенстве инерционного момента и момента от разбаланса дрейф гироскопа равен нулю. Если при проверке дрейфа данное условие не соблюдается или не соответствует какому-либо допустимому значению дрейфа, производится регулировка, которая заключается в перемещении гайки 10 вдоль оси Х. Причем приближение гайки к ротору соответствует увеличению перекомпенсации инерционного момента. При регулировке также компенсируются технологические погрешности изготовления деталей и, как следствие, отклонение от равенства моментов от смещения диска PдLд и смещения втулки PвLв. В результате регулировки дрейфа в горизонтальной плоскости величина смещения гайки 10 будет соответствовать выражению (1);
в вертикальной плоскости YX (фиг. 2) создается в зоне А аэродинамическая сила сопротивления вращению ротора F1, которая больше силы F2. Это связано с увеличением скорости и турбулентности обтекающего потока в зоне А из-за появления угла пеленга. Разность сил ΔF = F1-F2 создает момент от аэродинамической несимметрии Mан, который равен Mан= ΔF•rан (фиг. 1) и направлен по оси Y (фиг. 2). Данный момент проявляет восстанавливающие свойства, совмещая векторы IΩ и ω, в противовес моменту трения в опорах крестовины Mтр [4], который для принятого встречного направления векторов iΩ и ω является уводящим ось ротора от вектора ω. (Следует отметить, что при совпадении направлении IΩ и ω [4] момент трения также будет проявлять восстанавливающие свойства). Обработка экспериментальных данных при исследовании момента аэродинамической несимметрии показывает, что сила ΔF обратно пропорциональна квадрату расстояния между диском и торцем ротора Δ
При эксплуатации гироскопического прибора на ракете, имеющей значительный стартовый импульс перегрузки, например, 30 ед в течение 3 с, а затем незначительную траекторную перегрузку, например, 1 ед, также пропорционально перегрузке изменяется момент трения в опорах подвеса. Момент трения в опорах подвеса на стартовом участке в этом случае компенсируется увеличенным моментом аэродинамической несимметрии (фиг. 3). Это достигается за счет установки аэродинамического диска 9 на гладкой части вилки 4 корпуса 5 и поджатия его к упору 17 корпуса пружиной 18 в сторону действия импульса стартового ускорения aх. При действии инерционной силы, которая вызывается данным ускорением и направлена в противоположную ему сторону, аэродинамический диск приближается к ротору, преодолевая усилие пружины, и увеличивает компенсирующий момент. Величина инерционной силы без учета трения скольжения равна Fин= mад•aх, где mад - масса аэродинамического диска. В этом случае регулировка дрейфа производится аналогично описанному по выражениям (1) и (2), однако при действии стартовой перегрузки расстояние между аэродинамическим диском и торцем ротора Δ2 (фиг. 3) будет переменным Δпер= Δ2-Fин/Cпр, где Cпр - жесткость пружины 18. При воздействии максимального стартового ускорения расстояние между диском и торцем ротора соответствует минимальному значению Δ0, которое обеспечивается ограничителем хода G диска 9.
Таким образом, описанная конструкция гироскопа и способ регулировки его дрейфа позволяют настроить дрейф в горизонтальной и вертикальной плоскостях на допустимую величину, близкую к нулю.
Источники информации
1. Идлин М.М., Сафронов Н.Д. Основы сборки, регулировки и контроля авиационных электрогироскопических приборов. -М.: 1968, рис. 10.3, с. 338.
2. Ковалев М.П., Моржаков С.П., Терехова К.С. Динамическое и статическое уравновешивание гироскопических устройств. -М: 1974, с. 246.
3. Патент США, N 3.142.184, нац. кл. 74-5.12, опублик. 28.07.64 г.
4. Пельпор Д.С. Гироскопические системы. Ч.1. Теория гироскопов и гироскопических стабилизаторов.- М.: 1971, с. 268-274, рис. X.10.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИРОСКОПИЧЕСКИЙ ПРИБОР | 1996 |
|
RU2123170C1 |
| ГИРОСКОПИЧЕСКИЙ ПРИБОР | 1998 |
|
RU2141623C1 |
| ГИРОСКОПИЧЕСКИЙ ПРИБОР (ВАРИАНТЫ) | 1998 |
|
RU2155324C1 |
| СПОСОБ УПРАВЛЕНИЯ САМОНАВОДЯЩИМСЯ ВРАЩАЮЩИМСЯ СНАРЯДОМ | 1998 |
|
RU2146798C1 |
| ГИРОСКОПИЧЕСКИЙ ПРИБОР | 2003 |
|
RU2239788C1 |
| СПОСОБ КОРРЕКЦИИ ПЕРПЕНДИКУЛЯРНОСТИ ОСИ РОТОРА ГИРОСКОПА И ГИРОСКОПИЧЕСКИЙ ПРИБОР | 2000 |
|
RU2175113C1 |
| ГИРОСКОПИЧЕСКИЙ ПРИБОР | 2002 |
|
RU2217699C2 |
| ГИРОСКОПИЧЕСКИЙ ПРИБОР | 2000 |
|
RU2179302C1 |
| ГИРОКООРДИНАТОР ГОЛОВКИ САМОНАВЕДЕНИЯ | 1994 |
|
RU2093782C1 |
| ГИРОСКОПИЧЕСКИЙ ПРИБОР | 2000 |
|
RU2176779C1 |

Гироскопический прибор предназначен для использования в качестве датчика угла пеленга на противотанковых вращающихся по крену управляемых ракетах. Ротор выполнен в виде диска с балансировочными винтами на его периферии. Соосная ротору цилиндрическая втулка смещена относительно его центра масс. В полости втулки размещены опора ротора и внутренний кардановый подвес. Центр масс диска смещен от центра карданового подвеса. В корпусе установлен и закреплен соосно ротору аэродинамический диск в виде усеченного конуса. Разгонное устройство подсоединено к ротору разъемным соединением. Оно обеспечивает вращение ротора в противоположную сторону относительно вращения корпуса с кардановым подвесом. На втулке ротора зафиксирована регулировочная гайка. При проверке и регулировке дрейфа корпус с кардановым подвесом вращают встречно ротору. Одновременно проверяют дрейф в горизонтальной и вертикальной плоскостях. В горизонтальной плоскости компенсируют дрейф смещением центра масс гироскопа посредством перемещения регулировочной гайки во втулке ротора от центра карданового подвеса. Дрейф по вертикали компенсируют смещением относительно ротора аэродинамического диска. Обеспечивается повышение точности прибора за счет уменьшения его дрейфа. 2 с. и 2 з.п.ф-лы, 4 ил.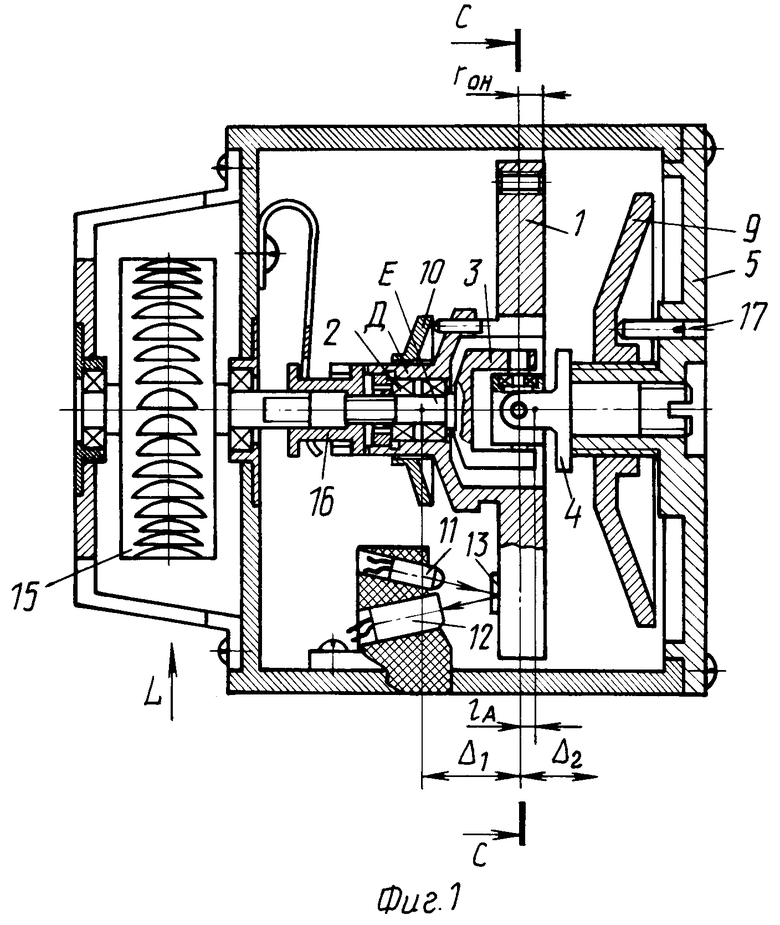
Δ1= (Isω2sinθ-Pдlд+Pвlв)/Pбг,
где Δ1 - величина смещения центра масс регулировочной гайки от центра карданового подвеса;
Is - суммарный момент инерции карданового подвеса;
ω - угловая скорость вращения корпуса;
θ - угол пеленга;
Pд - масса диска;
Lд - расстояние от центра масс диска до центра подвеса;
Pв - масса втулки;
Lв - расстояние от центра масс втулки до центра подвеса;
Pбг - масса регулировочной гайки,
дрейф по вертикали компенсируют смещением относительно ротора аэродинамического диска на величину Δ2, величину Δ2 выбирают из соотношения
Δ2= (kанMarанsinθ/Mтр)1/2,
где Δ2 - величина смещения усеченной вершины конуса аэродинамического диска от торцевой поверхности ротора;
Kан - коэффициент аэродинамической несимметрии, учитывающий влияние на изменение угла пеленга момента, вызванного взаимодействием с ротором обтекающей его среды;
Mа - момент аэродинамического сопротивления вращению ротора;
rан - плечо приложения силы от аэродинамической несимметрии;
Mтр - момент сил трения в опорах подвеса.
| US, патент, 4271709, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| FR, заявка, 2463914, кл | |||
| G 0 1 C 19/12, 1981 | |||
| EP, заявка, 0195547, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| US, патент, 3142184, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Идлин М.М | |||
| и др | |||
| Основы сборки, регулиров ки и контроля авиационных электрогироскопических приборов | |||
| Приспособление для контроля движения | 1921 |
|
SU1968A1 |
| Чемодан с сигнальным замком | 1922 |
|
SU338A1 |

