Изобретение относится к области гироскопических приборов, которые используются в качестве датчика угла пеленга на управляемых ракетах ближнего боя.
У таких гироскопов ось вращения ротора в исходном положении совпадает с продольной осью ракеты, и при движении по траектории между осью вращения ротора и продольной осью ракеты появляется угол пеленга, который используется в системе управления ракетой. Для рассматриваемого класса приборов на малогабаритных ракетах используются импульсные гироскопы, обеспечивающие разгон ротора от какого-либо источника энергии за доли секунды и затем работают на выбеге. Это обеспечивает практически постоянную готовность ракеты к пуску. Одним из основных требований, предъявляемых к таким гироскопам, является небольшой дрейф (прецессия, уход), высокая точность измерения угла датчиком при линейной его характеристике, простота конструкции и небольшие габариты.
Известна конструкция [1] гироскопического прибора, который содержит корпус, сферический ротор, вращающийся в газовом подвесе, а также корпус, на котором установлены пьезодатчики, вырабатывающие информацию об угловом положении ротора. Информация вырабатывается по измеренной разности давления газа в поддерживающем (взвешивающем) ротор слое газа. Такая конструкция не нашла применения в рассматриваемом классе управляемых малогабаритных ракет ближнего боя из-за сложности конструкции, связанной с процессом взвешивания и разгона ротора, больших габаритов, вызванных необходимостью размещения источника сжатого газа. Кроме того, пьезодатчик имеет небольшую чувствительность, так как измеряет малую разность небольшого взвешивающего ротор давления газа, и небольшой линейный диапазон измерения углов.
Известна [2] конструкция гироскопического прибора, которая по технической сути является наиболее близким аналогом (прототипом). Гироскопический прибор содержит корпус, ротор, вращающийся в газовом подвесе, на корпусе установлен фотооптический датчик, взаимодействующий с зеркалом, размещенным во внутренней выемке ротора по оси его собственного вращения. Фотооптический датчик, состоящий, например, из фотодиода и светодиода, выдает информацию об угловом положении ротора относительно корпуса. Регистрация углового положения ротора возможна за счет изменения освещенности фотодиода лучом света, отраженным от зеркала. Недостатком данной конструкции является небольшой диапазон измерения угла поворота корпуса, что вызвано смещением отраженного луча с фотодиода, а также небольшая линейная зона датчика из-за нарушения параллельности между зеркалом и фотооптическим датчиком при вращении корпуса. Кроме того, рассматриваемая конструкция сложна в изготовлении и имеет большие габариты из-за наличия газоподводящих каналов вокруг ротора и источника чистого сжатого газа значительного объема. Такие конструкции гироскопов не нашли применения на рассматриваемом классе малогабаритных ракет ближнего боя.
Предлагаемое изобретение актуально в связи с тем, что требования к основным выходным характеристикам гироскопических приборов, в частности точности измерения углов пеленга, постоянно повышаются в условиях ограничения массогабаритных характеристик и требований по простоте конструкции и изготовления.
Задачей предлагаемого изобретения является расширение линейного диапазона измеряемых гироскопом углов посредством фотооптического датчика и повышение точности измерений при обеспечении простоты конструкции и ее небольших габаритов.
Для достижения поставленной задачи в гироскопическом приборе, содержащeм корпус, ротор в подвесе, фотооптический датчик угла, установленный на корпусе и взаимодействующий с зеркалом, размещенным на роторе соосно оси его собственного вращения,
- зеркало выполнено в форме сферического сегмента;
- установлено основанием сферического сегмента на торцевой поверхности ротора с размещением центра сферы в точке подвеса ротора;
- на сферической поверхности зеркала выполнена контрастная маска, которая размещена симметрично плоскости, проходящей через ось собственного вращения ротора, между двумя линиями, проведенными через концы дуг, параметры которых выбраны из условия
λ = (ϕ-ϕo)(λmax-λmin)/(ϕmax-ϕmin),
где λ - центральный угол дуги маски в плоскости, перпендикулярной оси собственного вращения ротора;
ϕ и ϕo - угловое положение дуги маски и точки пересечения линий на сфере, измеряемое относительно плоскости большого круга, параллельной основанию сферического сегмента в плоскости, проходящей через ось собственного вращения ротора;
λmax, λmin, ϕmax, ϕmin - максимальные и минимальные значения величин λ и ϕ, определяющие границы маски.
Предлагаемая конструкция гироскопического прибора позволяет за счет размещения контрастной маски на полусфере с зеркальной поверхностью значительно расширить диапазон измеряемых углов (до 30o) и обеспечить в указанном диапазоне линейную характеристику сигнала с фотооптического датчика за счет определенного выбора параметров кривых линий на полусфере, соединяющих концы дуг маски.
Сущностью данного предлагаемого изобретения является использование в фотооптическом датчике контрастной маски переменной ширины на зеркальной сферической поверхности быстро вращающегося ротора. При этом при отклонении корпуса относительно ротора изменяется длительность импульса фототока, и ее приращение пропорционально приращению измеряемого угла.
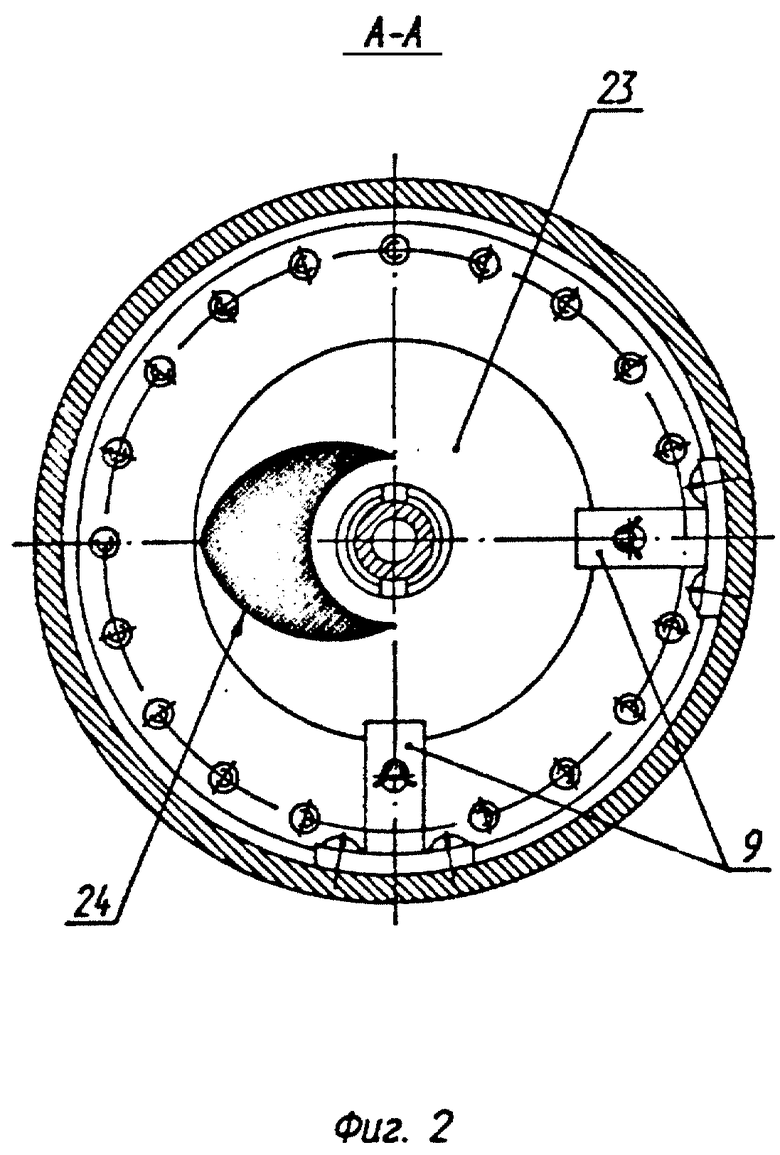
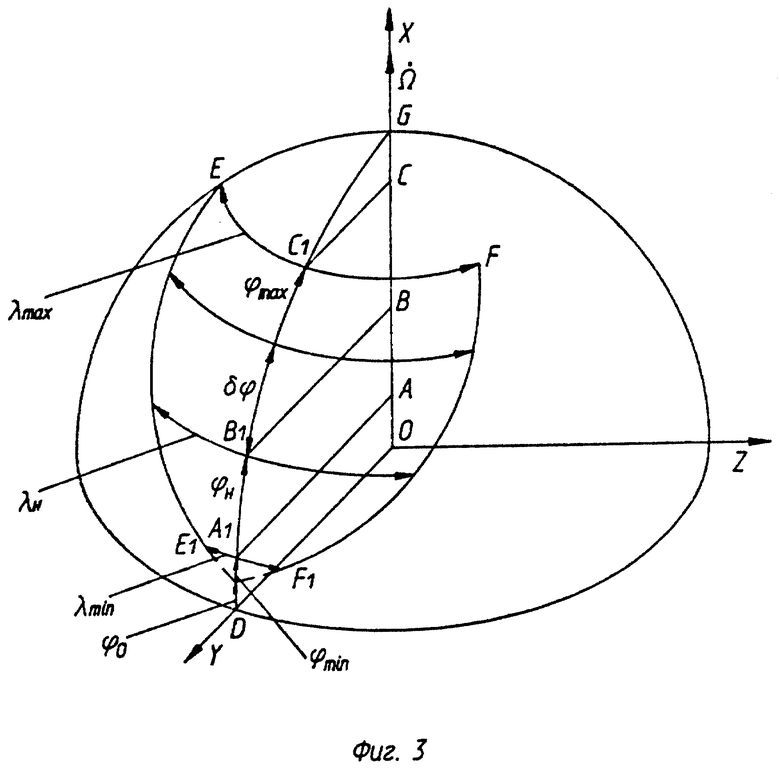
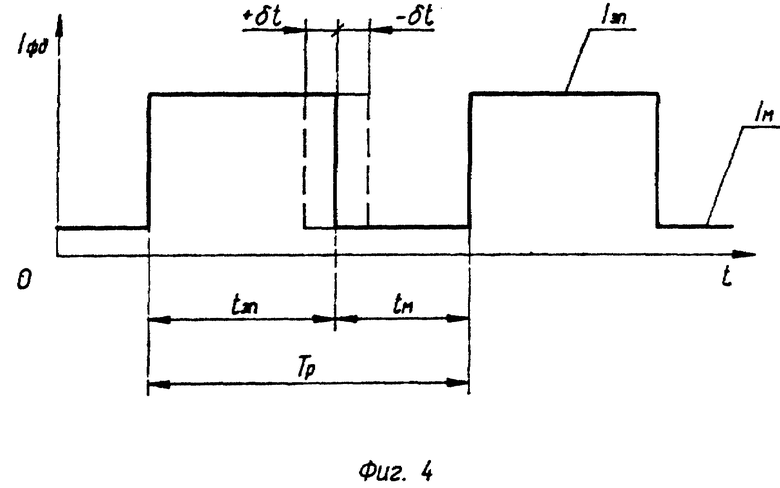
На фиг. 1 показан общий вид предлагаемого гироскопического прибора; на фиг. 2 - разрез А-А по фиг. 1; на фиг. 3 - принципиальная схема контрастной маски; на фиг. 4 - характер сигнала, снимаемого с фотооптического датчика.
Гироскопический прибор содержит ротор 1 (фиг. 1), установленный на шарикоподшипниках 2 на внутреннем кардановом подвесе, состоящем из вилки 3 (внутренней рамки) и крестовины 4 (наружной рамки), разгонную реактивную турбину 5, снабженную газовыми соплами 6, корпус 7, арретир 8 и фотооптический датчик угла 9.
Внутренний кардановый подвес объединен посредством подшипника 10 и полуосей 11 и закреплен на корпусе 7 через вилку 12.
На периферии ротора 1 равномерно по окружности установлены балансировочные винты 13, обеспечивающие уравновешивание относительно его оси вращения, а на его резьбовой части размещена балансировочная гайка 14, обеспечивающая уравновешивание относительно осей карданова подвеса 3, 4.
Турбина 5 размещена в изолированной от ротора 1 полости 15 со сбросовыми газоотводными каналами 16, которые выполнены за привалочной плоскостью 17 кольцевого фланца 18 крепления корпуса 7 в другом объекте со стороны, противоположной ротору 1.
Турбина 5 соединена с ротором 1 разъемным шлицевым соединением, включающeм подпружиненную шлицевую втулку 19, удерживаемую фиксатором 20.
Фотооптический датчик угла 9 представляет собой оптопары в виде источника излучения света - светодиода 21 и приемника излучения - фотодиода 22. Оптические оси светодиода и фотодиода пересекаются вблизи поверхности сферического зеркала - сферического сегмента 23, который установлен основанием на торце ротора 1 соосно оси его собственного вращения с размещением центра сферы в точке подвеса ротора. На сферической поверхности зеркала 23 выполнена контрастная маска 24, фиг. 2, с коэффициентом отражения значительно меньшим, чем у зеркала.
Маска размещена на сферической поверхности зеркала симметрично плоскости DOG, проходящей через ось собственного вращения ротора OX между двумя линиями EE1 и FF1, проведенными через концы дуг, параметры которых выбраны из условия:
где λ - центральный угол дуги маски в плоскости, перпендикулярной оси собственного вращения ротора;
ϕ и ϕo - угловое положение дуги маски и точки пересечения линий на сфере, измеряемое относительно плоскости большого круга, параллельной основанию сферического сегмента в плоскости, проходящей через ось собственного вращения ротора;
K - крутизна характеристики угловой величины дуги маски;
λmax, λmin, ϕmax, ϕmin - максимальные и минимальные значения величин λ и ϕ, определяющие границы маски.
Маска ограничена со стороны вершины полусферы дугой λmax, фиг. 3, которая выполнена на окружности сферы с радиусом CC1, перпендикулярным оси OX, а со стороны основания сферического сегмента маска ограничена дугой λmin, которая выполнена на окружности сферы с радиусом AAt1, перпендикулярным оси OX.
Величина дуги у вершины полусферы (λmax), больше, чем у основания полусферы (λmin). Это связано с получением большой угловой величины дуги при небольшой площади, что целесообразно для упрощения технологии изготовления маски на сферической поверхности и динамической балансировки ротора. Чем больше разница между этими дугами, тем больше крутизна К. Опыт показывает, что величина угла λmax может быть выполнена равной 180o, а величина угла λmin может быть равной нулю. Углы ϕmax (DOC1) и ϕmin (DOA1) определяют диапазон измерения угла отклонения ротора относительно корпуса, который равен 30-40o. Все дуги маски размещены симметрично плоскости DOG, что обеспечивает одинаковую крутизну сигналов с двух сторон маски, уменьшает искажение на фронтах сигнала и повышает его линейность. Начальное положение оптопар фотооптического датчика характеризуется их размещением на окружности с углом ϕн (DOB1) радиусом BB1, перпендикулярным оси собственного вращения ротора, и величина дуги при этом равна λн. При отклонении оптопар относительно этого начального положения зависимость для определения угла выглядит следующим образом: λ = λн+K(ϕ-ϕн) или δλ = Kδϕ, где δλ = (λ-λн) - приращение измеренного фотооптическим датчиком угла; δϕ = (ϕ-ϕн) - приращение измеряемого угла отклонения ротора.
Характер сигнала, снимаемого с фотодиода 22 датчика 9 при вращении ротора, приведен на фиг. 4, где показана зависимость тока фотодиода I во времени t без учета его искажения на крутых фронтах при переходе оптопары с маски на зеркало или наоборот. Сигнал характеризуется нижним уровнем фототока Iм, соответствующим прохождению оптопары через маску за время tм, и верхним уровнем фототока Iзп, соответствующим прохождению оптопары через зеркальную поверхность за время tзп.
При появлении угла поворота ротора δϕ (фиг. 3) изменяется время прохождения оптопарой по маске на величину ±δt, фиг. 4, и его измерение электронной аппаратурой цифровым методом дает возможность вычислить угловое приращение по формуле δϕ = δλ/K, где δλ = ±δt•2t/Tp; Tp - время, соответствующее одному обороту ротора; K - крутизна характеристики угловой величины дуги маски.
Опыт показывает, что чувствительность предлагаемого датчика равна 0,02o и линейность - до 3% в диапазоне углов около ±15o, что обосновывает его использование на рассматриваемом классе управляемых ракет.
Гироскопический прибор работает следующим образом. При подаче импульса тока на контакты электрозапала 25 происходит срабатывание пороховой реактивной турбины.
Истекающие из сопл 6 струи горячего порохового газа создают движущий момент, который прикладывается к ротору 1 через разъемное шлицевое соединение, включающее втулку 19.
Горячий газ срабатывается из изолированной полости 15 через газоотводные каналы 16 в сторону, противоположную стенкам корпуса 7, в полости которого размещен ротор 1, за счет расположения кольцевого фланца 18, что также обеспечивает теплоизоляцию ротора 1 и карданова подвеса 3, 4. Под действием реактивного момента турбины с ее резьбовой цапфы свинчивается перемещающийся по направляющим 26 арретир 8.
Происходит разгон двух инерционных масс в виде ротора 1 и турбины 5 до максимальных оборотов.
Затем после смещения по стрелке Б фиксатора 20 и перемещения по стрелке В шлицевой втулки 19 происходит отделение ротора 1 от инерционной массы турбины 5.
Ротор 1 становится свободным, приобретает гироскопические свойства, и его главная ось в дальнейшем сохраняет свое положение в пространстве.
При движении ракеты на траектории происходит отклонение ее продольной оси, а значит, продольной оси корпуса 7 гироскопического прибора от первоначального направления, при этом между этой осью и главной осью гироскопа образуется угол пеленга, который измеряется датчиком угла 9.
Измеренный электрический сигнал поступает в блок электронной аппаратуры ракеты.
Таким образом, совокупность признаков предлагаемого гироскопического прибора обеспечивает получение для системы управления положения. Характеристика выдаваемого гироскопом сигнала линейная в широком диапазоне отклонений ракеты, что повышает точность ее наведения. Для измерений угла использован бесконтактный фотооптический датчик, не создающий вредные моменты по осями подвеса гироскопа и не ухудшающий его точность.
Для разгона ротора в гироскопе использована энергия порохового газа для получения высокой угловой скорости ротора с одновременным максимальным снижением тепломеханического воздействия порохового разгонного двигателя на ротор за счет его размещения в изолированной полости. Это также повышает точность измерения углов пеленга.
Конструкция гироскопа имеет небольшие габариты и проста в изготовлении в условиях серийного производства, что особенно важно для рассматриваемого класса управляемых ракет ближнего боя.
Источники информации
1. Патент США N 3187588, 74-5.12, 08.07.65.
2. Патент США N 3446082, 74-5-12, 27.05.69.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА И ГИРОСКОПИЧЕСКИЙ ПРИБОР | 2001 |
|
RU2210727C2 |
| ГИРОСКОПИЧЕСКИЙ ПРИБОР (ВАРИАНТЫ) | 1998 |
|
RU2155324C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛА ПЕЛЕНГА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2314494C1 |
| СПОСОБ КОРРЕКЦИИ ПЕРПЕНДИКУЛЯРНОСТИ ОСИ РОТОРА ГИРОСКОПА И ГИРОСКОПИЧЕСКИЙ ПРИБОР | 2000 |
|
RU2175113C1 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ЗЕНИТНОГО РАКЕТНОГО КОМПЛЕКСА | 1999 |
|
RU2165582C2 |
| ГИРОСКОПИЧЕСКИЙ ПРИБОР И СПОСОБ РЕГУЛИРОВКИ ЕГО ДРЕЙФА | 1996 |
|
RU2114394C1 |
| ГИРОСКОПИЧЕСКИЙ ПРИБОР | 2002 |
|
RU2217699C2 |
| ГИРОСКОПИЧЕСКИЙ ПРИБОР | 2000 |
|
RU2179302C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛА ПЕЛЕНГА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2298152C2 |
| ГИРОСКОПИЧЕСКИЙ ПРИБОР | 2003 |
|
RU2239788C1 |
Прибор предназначен для использования в качестве датчика угла пеленга на управляемых ракетах ближнего боя. Прибор содержит корпус, ротор в подвесе, фотооптический датчик угла, установленный на корпусе и взаимодействующий с зеркалом, размещенным на роторе соосно с осью его собственного вращения. Зеркало выполнено в форме сферического сегмента и установлено основанием сферического сегмента на торцевой поверхности ротора с размещением центра сферы в точке подвеса ротора. На сферической поверхности зеркала выполнена контрастная маска, которая размещена симметрично плоскости, проходящей через ось собственного вращения ротора, между двумя линиями, проведенными через концы дуг, параметры которых выбраны из приведенных в описании условий. Обеспечивается расширение линейного диапазона измеряемых углов и повышение точности измерений при простоте конструкции и небольших габаритах. 4 ил.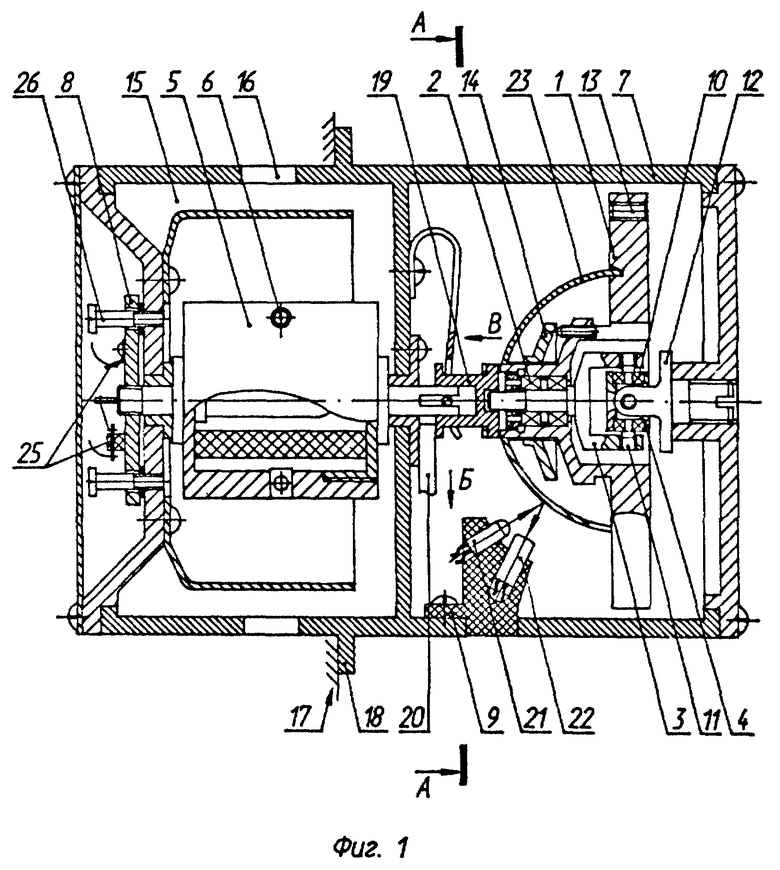
Гироскопический прибор, содержащий корпус, ротор в подвесе, фотооптический датчик угла, установленный на корпусе и взаимодействующий с зеркалом, размещенным на роторе соосно с осью его собственного вращения, отличающийся тем, что в нем зеркало выполнено в форме сферического сегмента и установлено основанием сферического сегмента на торцевой поверхности ротора с размещением центра сферы в точке подвеса ротора, а на сферической поверхности зеркала выполнена контрастная маска, которая размещена симметрично плоскости, проходящей через ось собственного вращения ротора, между двумя линиями, проведенными через концы дуг, параметры которых выбраны из условия
λ = (ϕ-ϕo)(λmax-λmin)/(ϕmax-ϕmin),
где λ - центральный угол дуги маски в плоскости, перпендикулярной оси собственного вращения ротора;
ϕ и ϕo - угловое положение дуги маски и точки пересечения линий на сфере, измеряемое относительно плоскости большого круга, параллельной основанию сферического сегмента в плоскости, проходящей через ось собственного вращения ротора;
λmax, λmin, ϕmax, ϕmin - максимальные и минимальные значения величин λ и ϕ, определяющие границы маски.
| US 3142184 A, 28.07.64 | |||
| МОДЕЛЬ ОБМОТКИ ВЫСОКОВОЛЬТНЫХ ИНДУКЦИОННЫХАППАРАТОВ | 0 |
|
SU195547A1 |
| СПОСОБ ПРОИЗВОДСТВА КОМПОТА ИЗ КРЫЖОВНИКА | 2010 |
|
RU2463914C2 |
| US 3738179 A, 12.06.73. | |||

