Предлагаемое изобретение относится к области гироскопических приборов, используемых в системах управления артиллерийских управляемых снарядов, а также противотанковых и зенитных ракет.
Известен гироскопический прибор [1], содержащий ротор в кардановом подвесе, заслонки, установленные на внутренней рамке карданова подвеса и сопла на наружной рамке, магистраль для подвода сжатого воздуха на наружную рамку. Недостатком такого гироприбора является сложность организации хранения и подвода сжатого воздуха к наружной рамке.
Известна схема построения гироскопического прибора с межрамочной коррекцией [2], представляющая собой гироскоп, на внутренней рамке которого установлен датчик угла прецессии, управляющий работой двигателя разгрузки, соединенного с наружной рамкой через редуктор. Недостатком такого гироскопа является необходимость введения в конструкцию прибора датчика угла прецессии, двигателя разгрузки, редуктора и элементов, обеспечивающих связь датчика угла и двигателя разгрузки.
Гироскоп артиллерийского управляемого снаряда [3] предназначен для измерения угла наклона продольной оси снаряда в вертикальной плоскости и формирования сигналов управления на участках инерциального управления и самонаведения. Он содержит основание с установленным в нем ротором на внутреннем кардановом подвесе, состоящем из внутренней и наружной рамок. Кинетический момент ротора направлен по продольной оси снаряда. На наружной рамке закреплена щетка ламельного датчика угла, установленного на основании. Недостатком гироскопа является ограниченность углов прокачки вследствие конструктивных особенностей (ротор при прокачке своим ободом контактирует с шейкой основания карданова подвеса).
Для формирования оптимальных траекторий наведения, увеличивающих вероятность попадания в цель в условиях ограничений по высоте нижней границы облачности, необходимо увеличить углы разворота снаряда, которые определяются величиной угла прокачки гироскопического прибора. В процессе формирования команд управления на участке инерциального наведения, когда снаряд управляется только от гироскопа, требуется высокая точность удержания гироскопом направления своей оси, а на участке самонаведения, когда снаряд управляется от головки самонаведения и гироскопа и требуются большие углы разворота, гироскопу достаточно сохранять направление вертикальной плоскости, т.е. его точность может быть невысокой.
Увеличения угла прокачки гироскопа можно достичь, уменьшая диаметр шейки основания карданова подвеса, либо подрезая заднюю стенку ротора. В первом случае это ведет к снижению прочности к воздействию стартовой перегрузки из-за разупрочнения основания карданова подвеса, а второй путь малоэффективен, т.к. после подрезания заднего торца ротора для обеспечения балансировки карданова подвеса ротор необходимо перемещать назад. Другим путем увеличения углов разворота снаряда является использование в системе управления артиллерийского управляемого снаряда гироскопа с коррекцией, который при углах пеленга, меньших или равных углу планирования, функционирует как свободный гироскоп с высокой точностью удержания начального направления оси ротора, а при углах пеленга, больших угла планирования, функционирует как корректируемый гироскоп, ось ротора которого прецессирует за осью снаряда, сохраняя направление вертикальной плоскости.
Задачей предлагаемого изобретения является увеличение допустимых углов разворота артиллерийского управляемого снаряда при ограниченных углах прокачки гироскопа за счет обеспечения подслеживания осью ротора гироскопа за осью снаряда при отклонении гироскопа от начального положения на углы, превышающие зону нечувствительности, величина которой больше угла планирования.
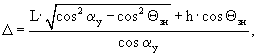
Указанная задача достигается тем, что в гироскопическом приборе вращающегося по крену артиллерийского управляемого снаряда, содержащем ротор, ось которого ориентирована по продольной оси, установленный во внутреннем кардановом подвесе, состоящем из внутренней и наружной рамок, основание карданова подвеса, на наружной рамке закреплена щетка ламельного датчика угла, установленного на основании, в нем на оси внутренней рамки на расстоянии от центра карданова подвеса, большем радиуса прокачки наружной рамки, параллельно оси ротора установлена планка со скругленными краями, имеющая возможность контактирования с двумя плоскими пружинами, установленными на основании карданова подвеса симметрично относительно оси внутренней рамки, плоскости которых перпендикулярны оси вращения наружной рамки, а расстояние между пружинами определяется выражением

где Δ - расстояние между пружинами;
L - длина планки;
h - ширина планки;
α y - угол разворота наружной рамки, в пределах которого планка может контактировать с пружинами;
Θ зн - угол зоны нечувствительности,
а на основании карданова подвеса установлено тормозное устройство, обеспечивающее приложение момента трения к наружной рамке при ее развороте относительно основания на угол, больший ±Θ зн.
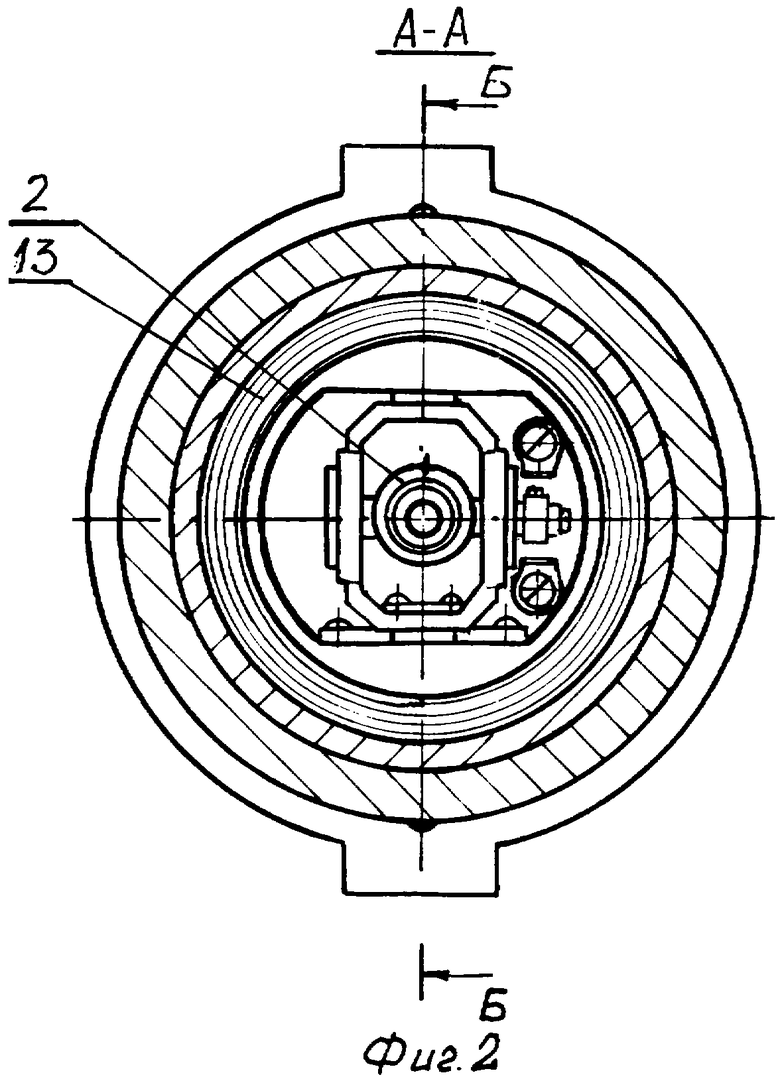
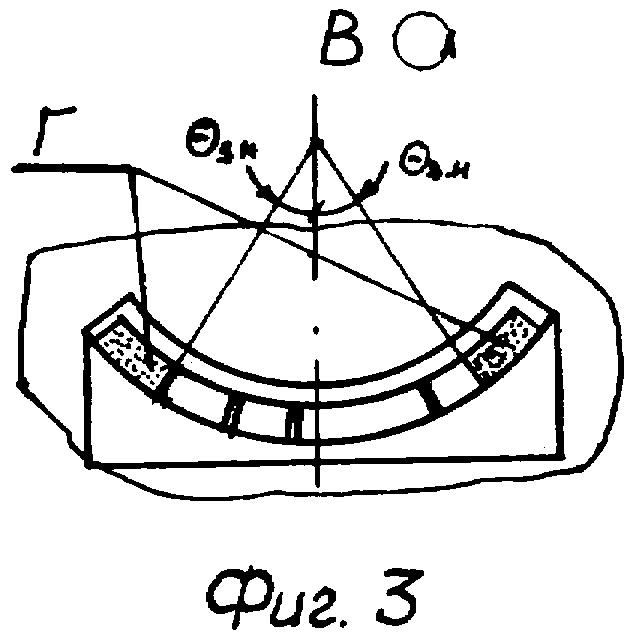
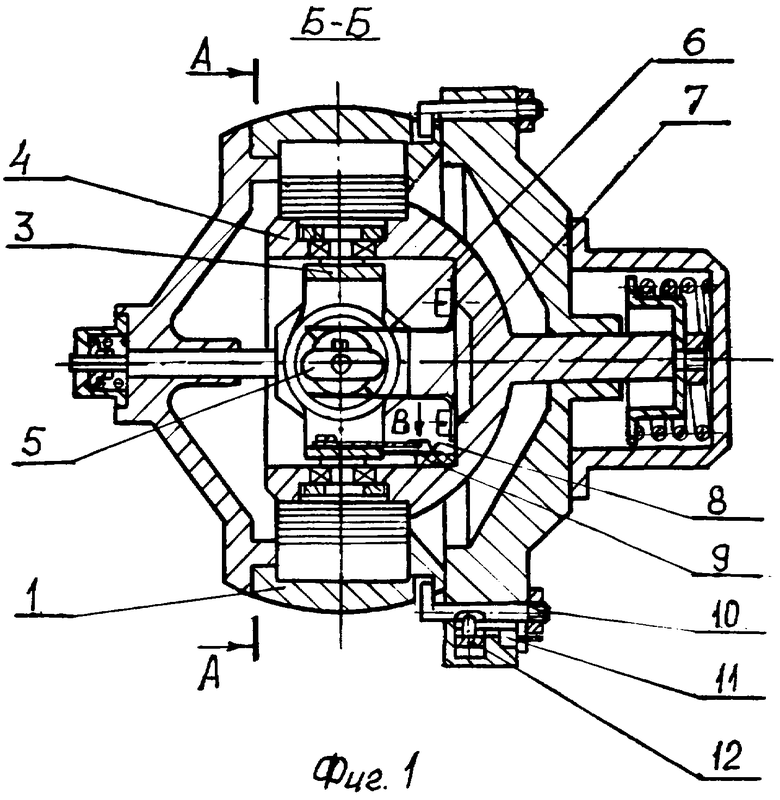
На фиг.1, 2, 3 изображены общий вид гироскопического прибора, разрез по корректирующему устройству и вид на датчик угла.
Ротор 1 во внутреннем кардановом подвесе, состоящем из внутренней 2 и наружной 3 рамок, установлен в основании карданова подвеса 4. На оси внутренней рамки, на расстоянии от центра карданова подвеса, большем радиуса прокачки наружной рамки 3, жестко закреплена планка 5 со скругленными углами, ось которой параллельна оси ротора, а на основании карданова подвеса 4 закреплены две плоские пружины 6, 7, установленные с возможностью контактирования плоскими частями с планкой 5 при развороте внутренней рамки на угол, больший угла зоны нечувствительности Θ зн системы подслеживания. Тормозное устройство реализовано, например, в виде закрепленной на наружной рамке щетки 8, контактирующей с поверхностью ламельного датчика угла 9, установленного на основании 4 и обеспечивающего формирование сигнала планирования. При этом поверхность датчика угла 9 в зоне углов от -Θ зн до +Θ зн выполнена шлифованной, а в зонах углов, больших |Θзн |шероховатой, реализуя тем самым тормозное устройство. Арретирование гироскопа осуществляется посредством 2-х Г-образных упоров 10.
Работает прибор следующим образом. После подачи напряжения на пирозапал 11 происходит перемещение поршня 12, в результате чего освобождается упор 10. Ротор 1 под действием момента пружинного двигателя 13 раскручивается до рабочих оборотов, запоминая направление оси снаряда в момент разарретирования. Под действием силы тяжести ось снаряда разворачивается в вертикальной плоскости и угол между осью ротора гироскопа и продольной осью снаряда (угол пеленга) увеличивается. Этот угол измеряется датчиком угла 9 и при его превышении величины заданного угла планирования формируется команда на рулевой привод, в результате чего обеспечивается планирование снаряда. На участке планирования угол между осями ротора гироскопа и снаряда поддерживается равным углу планирования.
На участке самонаведения угол пеленга Θ , измеряемый гироскопом, будет изменяться в зависимости от направления промаха снаряда (цель снизу или сверху) и соответственно увеличиваться или уменьшаться. В процессе вращения снаряда по крену при наличии угла пеленга Θ углы разворота внутренней и наружной рамок карданова подвеса за один оборот изменяются от -Θ до +Θ . При совпадении оси наружной рамки с вертикальной плоскостью угол ее разворота равен 0, а угол разворота внутренней рамки и вместе с ней планки 5 равен Θ . При этом увеличивается проекция длины планки на плоскость, перпендикулярную оси основания карданова подвеса. При превышении величиной проекции расстояния между плоскостями пружин 6 и 7 планка 5 в зоне углов разворота наружной рамки ±α у контактирует с пружинами и к наружной рамке вследствие ее вращения вокруг своей оси, обусловленного кинематикой внутреннего карданова подвеса, прикладывается момент трения. В результате его воздействия, ось ротора гироскопа при вращении ротора и снаряда в одном направлении прецессирует в сторону совмещения с осью снаряда, уменьшая угол пеленга, что позволяет увеличить допустимые углы разворота снаряда без увеличения угла прокачки гироскопа. При дальнейшем вращении угол β разворота внутренней рамки уменьшается, а угол α разворота наружной рамки увеличивается, и когда α превысит величину угла зоны нечувствительности Θ зн, щетка 8 начинает контактировать с шероховатой поверхностью датчика угла 9, имеющей большой коэффициент трения, реализуя тормозное устройство. Возникающий при этом момент трения вызывает прецессию оси ротора в сторону уменьшения угла пеленга. Таким образом, четыре раза за оборот к гироскопу прикладывается дополнительный момент трения, вызывающий подслеживание оси ротора гироскопа за осью снаряда.
Величина скорости прецессии под действием момента трения зависит от величины угла пеленга, величины зоны нечувствительности, контактного давления, коэффициента трения контактирующих поверхностей, расстояния между пружинами, жесткостей пружин и величины зоны контактирования кулачка с пружинами.
Величина угла зоны нечувствительности выбирается большей угла планирования на величину динамического угла разворота снаряда, обеспечивающего потребную величину перегрузки.
Для определения расстояния между пружинами в зависимости от величины угла зоны нечувствительности системы подслеживания за осью снаряда воспользуемся формулой, связывающей величины углов разворота наружной рамки относительно основания α и внутренней рамки относительно наружной β с величиной угла пеленга Θ : cosΘ =cosα × cosβ . Отсюда определяется угол β нк начала контактирования в зависимости от угла зоны нечувствительности Θ зн и угла разворота наружной рамки α у, в пределах которого планка может контактировать с пружинами
Величина угла  где l - длина пружины; Rk - расстояние от центра карданова подвеса до планки.
где l - длина пружины; Rk - расстояние от центра карданова подвеса до планки.
Для планки длиной L и шириной h расстояние между пружинами определяется как L=L× sinβ н+h× cosβ н или

где Δ - расстояние между пружинами;
L - длина планки;
h - ширина планки;
Θ зн - угол зоны нечувствительности системы подслеживания;
α у - угол разворота наружной рамки, в пределах которого планка может контактировать с пружинами.
Для исключения приложения относительно оси внутренней рамки вредного реактивного момента от взаимодействия кулачка с пружинами применяются две пружины. Моменты взаимодействия каждой из пружин приложены к кулачку и направлены в противоположные стороны, в результате чего суммарный момент, приложенный к оси внутренней рамки, мал, а регулировка контактного давления одной из пружин позволяет свести его к нулю, что обеспечивает сохранение гироскопом неизменным направления вертикальной плоскости.
Применение предлагаемой конструкции прибора позволяет ввести подслеживание оси ротора гироскопа за осью снаряда при углах отклонения ротора относительно оси снаряда, больших величины угла зоны нечувствительности гироскопа, и тем самым увеличить углы допустимых разворотов снаряда.
Источники информации
1. Я.И. Соловьев. Гироскопические приборы и автопилоты. М.: Оборонгиз, 1947, стр. 444.
2. Д.С. Пельпор. Гироскопические системы. М.: Высшая школа, 1971 г., стр. 283.
3. 152-мм выстрел 3ВОФ64 с осколочно-фугасным управляемым снарядом 3ОФ39 и зарядом №1. Техническое описание и инструкция по эксплуатации. М., Военное издательство, 1990 г., стр. 51.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА И ГИРОСКОПИЧЕСКИЙ ПРИБОР | 2001 |
|
RU2210727C2 |
| ГИРОСКОПИЧЕСКИЙ ПРИБОР | 1999 |
|
RU2180728C2 |
| ГИРОСКОПИЧЕСКИЙ ПРИБОР | 2000 |
|
RU2176779C1 |
| ГИРОСКОПИЧЕСКИЙ ПРИБОР И СПОСОБ РЕГУЛИРОВКИ ЕГО ДРЕЙФА | 1996 |
|
RU2114394C1 |
| ГИРОСКОПИЧЕСКИЙ ПРИБОР | 2000 |
|
RU2179302C1 |
| ГИРОСКОПИЧЕСКИЙ ПРИБОР | 2001 |
|
RU2216712C2 |
| ГИРОСКОПИЧЕСКИЙ ПРИБОР | 2002 |
|
RU2217699C2 |
| ГИРОСКОПИЧЕСКИЙ ПРИБОР | 2010 |
|
RU2416069C1 |
| СПОСОБ КОРРЕКЦИИ ПЕРПЕНДИКУЛЯРНОСТИ ОСИ РОТОРА ГИРОСКОПА И ГИРОСКОПИЧЕСКИЙ ПРИБОР | 2000 |
|
RU2175113C1 |
| ГИРОСКОПИЧЕСКИЙ ПРИБОР (ВАРИАНТЫ) | 1998 |
|
RU2155324C1 |
Изобретение относится к области гироскопических приборов, используемых в системах управления артиллерийских управляемых снарядов, а также противотанковых и зенитных ракет. Сущность изобретения: в гироскопическом приборе вращающегося по крену артиллерийского управляемого снаряда на наружной рамке карданова подвеса закреплена щетка ламельного датчика угла, установленного на основании, на оси внутренней рамки на расстоянии от центра карданова подвеса, большем радиуса прокачки наружной рамки, параллельно оси ротора установлена планка со скругленными краями, имеющая возможность контактирования с двумя плоскими пружинами, установленными на основании карданова подвеса симметрично относительно оси внутренней рамки, плоскости которых перпендикулярны оси вращения наружной рамки. На основании карданова подвеса установлено тормозное устройство, обеспечивающее приложение момента трения к наружной рамке при ее развороте относительно основания на угол, больший зоны нечувствительности. Достигается увеличение углов разворота снаряда при ограниченных углах прокачки ротора. 3 ил.
Гироскопический прибор вращающегося по крену артиллерийского управляемого снаряда, содержащий ротор, ось которого ориентирована по продольной оси, установленный на внутреннем кардановом подвесе, состоящем из внутренней и наружной рамок, основание карданова подвеса, на наружной рамке закреплена щетка ламельного датчика угла, установленного на основании, отличающийся тем, что на оси внутренней рамки на расстоянии от центра карданова подвеса, большем радиуса прокачки наружной рамки, параллельно оси ротора установлена планка со скругленными краями, имеющая возможность контактирования с двумя плоскими пружинами, установленными на основании карданова подвеса симметрично относительно оси внутренней рамки, плоскости которых перпендикулярны оси вращения наружной рамки, а расстояние между пружинами определяется выражением
где Δ - расстояние между пружинами;
L - длина планки;
h - ширина планки;
αy - угол разворота наружной рамки, в пределах которого планка может контактировать с пружинами;
Θзн - угол зоны нечувствительности,
а на основании карданова подвеса установлено тормозное устройство, обеспечивающее приложение момента трения к наружной рамке при ее развороте относительно основания на угол, больший ± Θзн.
| СПОСОБ КОРРЕКЦИИ ПЕРПЕНДИКУЛЯРНОСТИ ОСИ РОТОРА ГИРОСКОПА И ГИРОСКОПИЧЕСКИЙ ПРИБОР | 2000 |
|
RU2175113C1 |
| ГИРОСКОПИЧЕСКИЙ ПРИБОР И СПОСОБ РЕГУЛИРОВКИ ЕГО ДРЕЙФА | 1996 |
|
RU2114394C1 |
| ГИРОСКОПИЧЕСКИЙ ПРИБОР (ВАРИАНТЫ) | 1998 |
|
RU2155324C1 |
| ГИРОСКОПИЧЕСКИЙ ПРИБОР | 2000 |
|
RU2176779C1 |
| ГИРОКООРДИНАТОР ГОЛОВКИ САМОНАВЕДЕНИЯ | 2000 |
|
RU2177600C1 |
| ГИРОСКОПИЧЕСКИЙ ПРИБОР | 1999 |
|
RU2180728C2 |
| US 4949917 А, 21.08.1990 | |||
| Составной нерасходуемый электрод | 1974 |
|
SU489613A1 |
