Изобретение относится к рельсовому транспорту, в частности к устройствам прогнозирования и обнаружения буксования колесных пар по характеристикам динамических процессов в механической части тягового привода.
Известны устройства обнаружения буксования колесных пар, принцип действия которых основан на измерении скорости скольжения, избыточного вращения колесной пары путем сравнения скорости ее вращения со скоростями вращения остальных (не буксующих) колесных пар, например, по току якоря тягового электродвигателя [1].
Недостатком устройства, отслеживающего скорость скольжения колесной пары, является то, что оно срабатывает тогда, когда буксование уже началось, о чем свидетельствует факт развития скольжения колес.
Такие устройства не способны прогнозировать возможное буксование до потери устойчивого сцепления колес с рельсами.
Известно устройство обнаружения предельных по сцеплению режимов работы тягового привода рельсового транспорта, которое является наиболее близким по технической сущности к заявляемому устройству [2].
В устройстве решается задача получения и обработки информации о наступлении предельных по сцеплению колес с рельсами режимов работы тягового привода. На основе обработанной информации устройство выдает логический сигнал на протяжении всего времени существования предельного по сцеплению режима до его полного устранения. Устройство позволяет оптимально управлять тягой и устойчиво, без буксования реализовать максимальные тяговые качества локомотива.
Устройство адаптируется к условиям эксплуатации: постоянно формируя и запоминая характерные параметры устойчивого режима тяги, и, принимая их за эталонные, сравнивает с ними параметры процесса, протекающего в данный момент.
По степени отклонения параметров текущего режима от параметров, соответствующих режиму устойчивой тяги, в блоке сравнения вырабатывается сигнал, свидетельствующий о возможном переходе от режима тяги к режиму буксования до начала избыточного скольжения колес.
Существенным и принципиальным недостатком устройства, ограничивающим его практическое применение, являются его ложные срабатывания сразу после выхода тягового привода из предбуксовочного режима. Причиной таких ложных срабатываний, как показали натурные испытания, являются незавершенные переходные процессы, происходящие в механической части тягового привода, характерные для режимов реализации предельных по сцеплению сил тяги [3].
Задачей изобретения является устранение ложных срабатываний сразу после выхода тягового привода из предбуксовочного режима. Заявляемое устройство принимает вибросигнал от датчика, установленного на механической части тягового привода. Формирует и сравнивает уровни вибросигнала - текущего и эталонного, представляющие собой статистические характеристики сигнала, вычисленные за различные интервалы времени.
По степени взаимного рассогласования указанных параметров сравнивающий блок устройства вырабатывает логический сигнал, свидетельствующий о предельном по сцеплению режиме и возможном буксовании. В заявляемом устройстве реализованы меры по исключению ложных реакций на незавершенные переходные процессы в динамической системе. Достигается это задержкой по времени при переводе устройства из состояния подачи логического сигнала в исходное состояние. В этом случае в исходное состояние устройство переходит после полного завершения переходных процессов, благодаря чему ложные срабатывания исключаются.
На фиг. 1 представлена схема заявляемого устройства, а на фиг. 2 - временная диаграмма сигналов, формируемых его блоками.
Заявляемое устройство состоит из датчика вибросигнала 1, установленного на механической части привода колесной пары, аналого-цифрового преобразователя 2, полосового фильтра 3, блока формирования уровня текущего сигнала 4, блока формирования уровня эталонного сигнала 5, блока сравнения уровней сигнала и классификации динамических режимов работы привода 6, управляемого переключателя 7, блока задержки переключающего сигнала 8.
Заявляемое устройство работает следующим образом.
Сигнал с датчика 1 поступает на вход аналого-цифрового преобразователя 2, где происходит его преобразование в цифровой временной ряд, который поступает на вход полосового фильтра 3. После фильтрации сигнал содержит информацию о процессах, протекающих только в определенном частотном диапазоне, в котором их характерные свойства проявляются наиболее ярко. С выхода полосового фильтра сигнал поступает на вход блока 4 и через логический переключатель 7 на вход блока 5.
В блоке 4 формируется уровень сигнала, соответствующий текущему динамическому режиму, St - статистические характеристики временного ряда, вычисляемые за малый промежуток времени.
В блоке 5 формируются эталонный уровень сигнала Se - статистические характеристики временного ряда, вычисленные за длительный промежуток времени. Таким образом, параметр St практически повторяет изменение интенсивности колебательного процесса в приводе, а параметр Se изменяется медленно, оставаясь почти постоянным и равным некоторой средней величине, соответствующей стационарному тяговому режиму.
С увеличением, например, скорости движения локомотива или с ухудшением состояния пути интенсивность колебаний в приводе возрастает, что приводит к возрастанию параметров Se и St, но их отношение остается постоянным до тех пор, пока в приводе не возникнет нестационарный переходный процесс, приводящий к резкому изменению интенсивности колебаний.
В момент отклонения от стационарного режима параметр St быстро изменяется (увеличивается), а параметр Se, реагирующий на резкие изменения с существенным запаздыванием, еще некоторое время сохраняет значение, мало отличающееся от своего прежнего значения, соответствовавшего стационарному режиму.
Блок 6 классифицирует режим работы привода по величине
q=St/(kSe), где k - постоянный коэффициент, определяющий чувствительность устройства и устанавливаемый при его регулировке (k>1).
Если q<1, то имеет место устойчивый режим тяги (или выбега).
Если q≥1, то начался переходный режим или режим буксования.
Изменение от времени величин St и kSe, а также логического сигнала на выходе блока 6 - L(q) показаны на фиг. 2.
До момента времени «a» привод находился в режиме тяги и L(q)=0.
С момента времени «a» начался переходный процесс, обусловленный ухудшением сцепления колес с рельсами и сопровождающийся ростом величины St. Величина kSe при этом практически не изменяется.
В момент времени «b» выполняется условие q≥1, и срабатывает блок 6, формируя логический сигнал L(q)=1. Управляемый логическим сигналом блока 6 переключатель 7 отключает вход блока 5 от выхода полосового фильтра 3 и соединяет между собой вход и выход блока 5. Величина Se циркулирует в блоке 5, сохраняя свой средний уровень, и стремится к постоянной величине, соответствующей предыдущему режиму тяги.
С момента времени «b» по сигналу блока 6 включаются противобуксовочные системы локомотива: снижается тяговый момент или подается песок. Переходный процесс прекращается, и величина St снижается.
В момент времени «с» выполнятся условие q<1, срабатывает блок 6 и подает сигнал L(q)=0 на переключатель 7 через блок задержки 8 - сигнал L1(q)=0 на фиг. 2.
Через время t1 в момент «c1» вход блока 5 подключается к источнику реального сигнала - к выходу полосового фильтра 3, и устройство снова готово к работе по своему назначению.
Функциональная особенность блока задержки 8 состоит в том, что команда L(q)=1 из блока 6 в переключатель 7 поступает без задержки, а команда L1(q)=L(q)=0 из блока 6 в переключатель 7 поступает с задержкой по времени t1.
За время t1 в тяговом приводе завершаются динамические переходные процессы, вызванные предельным по сцеплению режимом, за счет чего исключаются ложные срабатывания.
Задержка времени зависит от типа локомотива и конструкции тягового привода. Оптимальная величина задержки времени устанавливается (регулируется) по результатам натурных испытаний локомотива в реальных условиях эксплуатации.
Установка блока 8 позволяет получить принципиально новое качество заявляемого устройства по сравнению с прототипом.
Работоспособность прототипа проверена в процессе натурных испытаний. Введение в заявляемом устройстве блока запаздывания 8 нисколько не снижает качество обнаружения предбуксовочных режимов, но также за счет исключения ложных срабатываний повысит достоверность обнаружения опасных предельных по сцеплению режимов.
Буксование известно со времен паровой тяги. Также хорошо известны негативные последствия этого явления - повышенный износ колес и рельсов, запредельные динамические нагрузки в элементах привода и пр.
Достоверное прогнозирование буксования позволит заблаговременно принять меры по его предотвращению и полному исключению.
Источники информации:
1. Измерение проскальзывания колеса для автоматического регулирования тягового и тормозного усилия. Экспресс-информация ВИНТИ, Локомотивостроение и вагоностроение, №36, 1969. Москва.
2. Патент РФ №2175612 - прототип.
3. Разработка и испытание опытного образца системы контроля сцепления колес локомотива с рельсами. Отчет о НИР/ООО НТК «Динамика»; рук. Коропец П.А. - Ростов н/Д, 2009. - 54 с. - № ГР 02200952897.

Изобретение относится к устройствам, указывающим на пробуксовку или юз колес. Устройство прогнозирования буксования колесных пар рельсового транспорта содержит датчик колебаний механической части привода колесной пары, аналого-цифровой преобразователь, полосовой фильтр, настроенный на информативный частотный диапазон и цепи формирования уровней сигнала, блок формирования текущего сигнала, блок формирования эталонного уровня сигнала, блок сравнения уровней сигнала, устанавливающий логический выходной сигнал, и управляемый переключатель входа блока формирования эталонного уровня сигнала. При этом датчик колебаний соединен с аналого-цифровым преобразователем, выход которого соединен с входом полосового фильтра, выход которого соединен с входом блока формирования эталонного уровня сигнала. При этом в цепи управления переключателем входа блока формирования эталонного уровня сигнала установлен блок задержки выходного логического сигнала. Технический результат заключается в исключении ложных срабатываний сразу после выхода тягового привода из предбуксвовочного режима. 2 ил.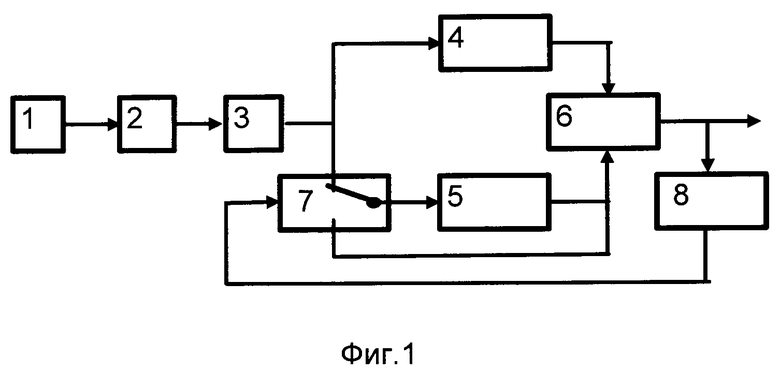
Устройство прогнозирования буксования колесных пар рельсового транспорта, содержащее датчик колебаний механической части привода колесной пары, аналого-цифровой преобразователь, полосовой фильтр, настроенный на информативный частотный диапазон и цепи формирования уровней сигнала, блок формирования текущего сигнала, блок формирования эталонного уровня сигнала, блок сравнения уровней сигнала, устанавливающий логический выходной сигнал, и управляемый переключатель входа блока формирования эталонного уровня сигнала, при этом датчик колебаний соединен с аналого-цифровым преобразователем, выход которого соединен с входом полосового фильтра, выход которого соединен с входом блока формирования эталонного уровня сигнала, отличающееся тем, что в цепи управления переключателем входа блока формирования эталонного уровня сигнала установлен блок задержки выходного логического сигнала.
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ПРЕДЕЛЬНЫХ ПО СЦЕПЛЕНИЮ РЕЖИМОВ РАБОТЫ ТЯГОВОГО ПРИВОДА РЕЛЬСОВОГО ТРАНСПОРТА | 2000 |
|
RU2175612C2 |
| Устройство противобуксовочнойи пРОТиВОюзНОй зАщиТы ТягОВОгОэлЕКТРОпРиВОдА | 1978 |
|
SU812615A1 |
| Устройство для обнаружения боксования и юза колесных пар транспортного средства | 1987 |
|
SU1468789A1 |
| RU 2071197 C1, 27.12.1996 | |||
| Состав для жирования кожи | 1974 |
|
SU573502A1 |

