Изобретение относится к электронно-измерительной технике и предназначено для использования в зондовом сканирующем устройстве как для целей высокоточного измерения рельефа поверхности, так и прецизионного позиционирования рабочего органа - зонда при выполнении технологических воздействий в процессах нанолитографии. В качестве основы микроскопа выступают сканирующий туннельный микроскоп (СТМ); атомно-силовой микроскоп (АСМ); сканирующий оптический микроскоп ближнего поля; сканирующий электронный микроскоп и т.п.
Известны способы прецизионного позиционирования зонда, используемые в сканирующем туннельном и атомно-силовом микроскопах [1, 2, 3].
Несмотря на высокое разрешение, достигаемое сканирующими зондовыми микроскопами (СЗМ), последние не могут без серьезной модернизации использоваться ни в качестве метрологического средства, ни как нанолитограф, поскольку на результаты проводимых измерений оказывают негативное влияние термодрейфы механической и электрической частей устройства, остаточная неортогональность и паразитные взаимосвязи между манипуляторами (кауплинг), а также свойственный пьезокерамике гистерезис и крип.
К настоящему моменту разработано множество методов, позволяющих избавиться от перечисленных выше искажающих факторов, но годными для решения интересующих нас задач следует признать способы [1, 2, 3], в которых производится активная динамическая коррекция работы пьезоманипуляторов микроскопа. Коррекция выполняется посредством введения в контур управления прибора трех замкнутых следящих систем - по одной на каждый манипулятор. Во время работы следящая система стремится компенсировать возникающую при движении манипулятора разность между заданной величиной перемещения и фактической, измеряемой с помощью линейного датчика.
Как показывает анализ, способы, применяемые в аналогах изобретения [1, 2, 3], принципиально ничем не отличаются друг от друга. Использование разных типов датчиков и связанной с ними электроники обрамления определяет чувствительность измерительной системы, ее линейность и ограниченный шумами минимальный размер шага манипулятора. Так, в системе [1] используется миниатюрный емкостной датчик, в системе [2] - оптический, а в системе [3] - сочетание датчика туннельного тока и программного распознавания элементов эталонной поверхности. Оптический датчик представляет собой пару: светоизлучающий диод-двухсекционное фотоприемное устройство, установленную на основании прибора и разделенную экраном с узкой щелью, который закреплен на манипуляторе. Туннельный датчик состоит из проводящей поверхности, острой иглы, пьезоманипулятора и системы стабилизации тока. Среднеквадратическое значение шума, измеренное в полосе частот в несколько кГц, составляет для системы [1] - 10 нм, для системы [2] - 0,6 нм и для [3] - 0,01 нм.
В качестве прототипа изобретения взят способ сканирования и позиционирования, применяемый в зондовом микроскопе [3]. В данном способе каждый манипулятор прибора механически связан с манипулятором датчика туннельного тока. В качестве проводящей поверхности датчика используется поверхность высоко ориентированного пиролитического графита (ВОПГ). ВОПГ удобен тем, что благодаря своим физико-химическим свойствам способен долго сохранять поверхность чистой, легко скалывается, имеет протяженные атомарно-гладкие участки и самое главное стабильную и высоко упорядоченную кристаллическую решетку.
В способе [3] любое перемещение какого-либо из манипуляторов микроскопа приводит к перемещению иглы соответствующего туннельного датчика вдоль поверхности графита, при этом система обратной связи датчика, используя свой собственный манипулятор, поддерживает величину туннельного зазора в нем на постоянном уровне. Одновременно со сканированием неизвестной поверхности образца в аналоге изобретения получается СТМ скан известной поверхности графита (постоянные кристаллической решетки: a = b = 2,464±0,002  угол между кристаллографическими направлениями: 60o). Выполняя программное распознавание атомов графита полученного изображения, можно сформировать управляющий сигнал коррекции для манипулятора микроскопа.
угол между кристаллографическими направлениями: 60o). Выполняя программное распознавание атомов графита полученного изображения, можно сформировать управляющий сигнал коррекции для манипулятора микроскопа.
К недостаткам используемого в прототипе способа измерения рельефа поверхности и позиционирования зонда относится:
1. Необходимость применения трех дополнительных следящих систем, каждая из которых оснащена высокочувствительным туннельным датчиком и манипулятором. Подобный подход значительно усложняет и удорожает СЗМ-нанолитограф;
2. Неспособность системы определять перемещения кончика зонда in situ, как следствие - возникновение погрешности косинуса и погрешности смещения Аббе [4]. Указанные погрешности появляются из-за того, что измерительная система датчика фиксирует смещение манипулятора относительно корпуса прибора и, следовательно, на получаемые результаты влияет: во-первых, несовершенство самого корпуса (в основном связанное с его термодеформацией), вызывая погрешность косинуса (дополнительное неучтенное перемещение манипулятора по причине несовпадения фактического направления перемещения с измерительной осью датчика); во-вторых, изгиб трубки манипулятора во время развертки (в АСМ еще и дополнительное влияние изгиба кантилевера), приводя к нарушению принципа Аббе (при изгибе из-за небольшой собственной длины зонда его кончик оказывается лежащим не на измерительной оси датчика, в результате образуется дополнительное неучтенное смещение);
3. Невозможность выполнять точные измерения рельефа на пределе разрешения микроскопа;
4. Вероятность ошибки измерения, связанная с тем, что из-за присутствия дефектов практически невозможно обеспечить неизменность структуры эталонной поверхности в каждой точке поля сканера;
5. Отсутствие критической для нанолитографии способности произвольно долго удерживать зонд в выбранном месте поверхности;
6. Отсутствие эффективного механизма подавления шумов микроскопа, возникающих как в системе стабилизации туннельного тока (силы в случае АСМ), так и в системе латерального позиционирования, и следовательно, невозможность улучшить вертикальное и латеральное разрешение микроскопа;
7. Неудобство в работе, связанное с тем, что характерный масштаб рельефа исследуемой поверхности не всегда соответствует атомному масштабу эталонной поверхности графита. В результате, например, время сканирования из-за необходимости использования малого шага может оказаться неоправданно большим. Замена графита на эталоны с более крупными структурными элементами и более крупными отрезками длины не всегда годится, поскольку в таком случае мы вынуждены использовать, как правило, уже не природный эталон, а искусственную неидеальную структуру, которая сама оказывается изготовленной с некоторыми погрешностями.
Из всего сказанного следует, что существующие на данный момент системы не способны обеспечить высокоточные измерения рельефа поверхности и выполнить прецизионное позиционирование рабочего органа в месте воздействия при нанолитографии.
Для устранения перечисленных выше недостатков предложен способ, основная идея которого заключается в использовании особенностей исследуемой поверхности в качестве опорных точек при выполнении перемещений. Перемещения осуществляются от одной особенности к другой, расположенной по соседству. В результате образуется связанная последовательность (цепочка), в которой особенности размещены относительно друг друга. В роли особенностей могут выступать как особенности типа "холм", так и особенности типа "яма". Поиск, обнаружение и вычисление координат положения особенности выполняет программа распознавания. Сканируя небольшую область (сегмент) вокруг каждой особенности, а затем, раскладывая полученные фрагменты поверхности по соответствующим позициям, определенным при распознавании, можно реконструировать реальный рельеф поверхности.
В способе фактически осуществляется переход от абсолютной системы координат, связанной с манипулятором, к относительной системе координат, связанной с особенностями поверхности. Класс допустимых поверхностей здесь можно определить через характерный размер особенности и через характерное расстояние между соседними особенностями. Необходимо, чтобы термодрейф и ползучесть в используемом микроскопе влияли бы незначительно на результаты однократных измерений рельефа в окрестности особенности и относительного расстояния между соседними особенностями и, следовательно, не приводили бы к ошибкам при выполнении усреднений.
Далее для определенности будем считать поверхность атомарно гладкой, а под особенностями будем понимать те выпуклости на ней (изменения электронной плотности), которые обычно принимаются за атомы. Отметим, что, как показывают реальные измерения, все атомарно гладкие поверхности подпадают под описание указанного класса и потенциально могут быть просканированы предлагаемым способом.
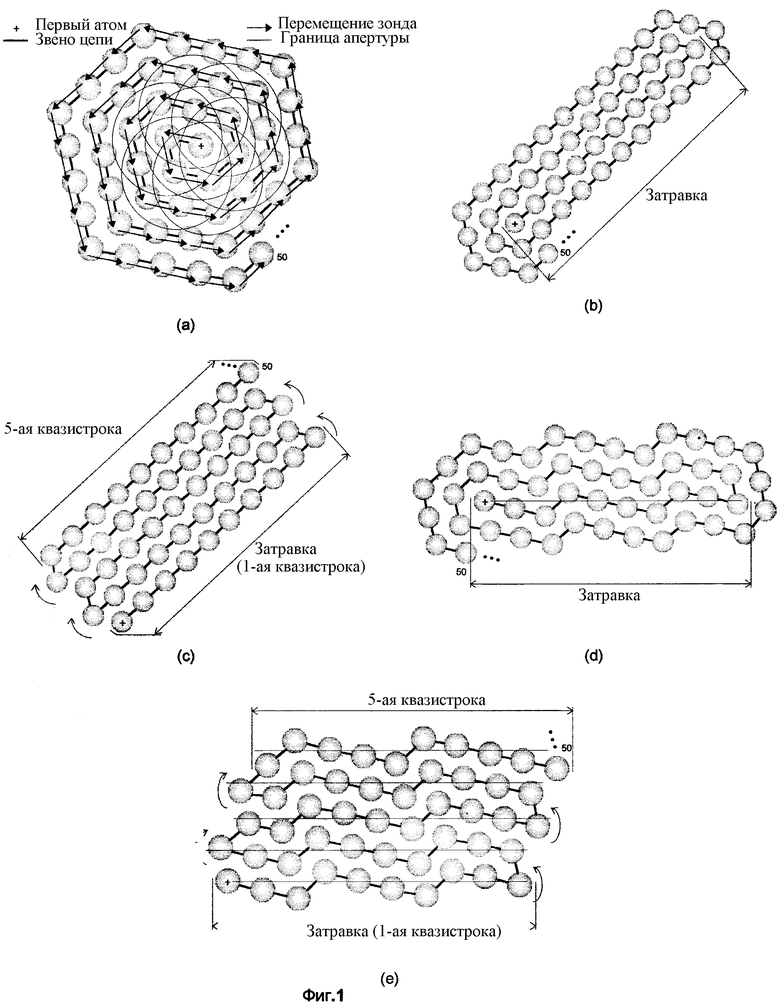
В данном изобретении получение скана поверхности складывается из двух этапов: на первом производится построение затравки - квазипрямолинейной цепочки атомов заданной длины, ориентированной в заданном направлении (направление отсчитывается от оси X-манипулятора против часовой стрелки); а на втором на сформированную затравку "наращивается" весь остальной скан, используя для этого один из следующих двух способов локального связывания.
В первом способе (см. фиг. 1) выполняется обход контура (затравки) с присоединением новых элементов цепи (контур остается все время, например, слева). Причем перемещение зонда во время сканирования происходит исключительно по узлам растущей цепочки (процесс похож на прокладку рельс путеукладчиком: передвигается по пути, который сам строит).
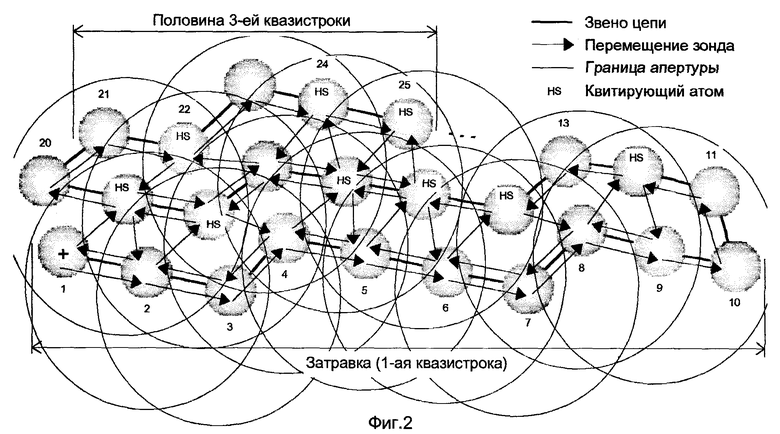
Во втором способе (см. фиг. 2) зонд перемещается по квазистрокам, играющим здесь вспомогательную роль. Первой квазистрокой служит затравка, остальные формируются в процессе сканирования. Тело цепочки образуется из элементов первой квазистроки и атомов-соседей для каждого положения зонда в квазистроке при его перемещении от последнего атома квазистроки к первому (возможная аналогия здесь может быть следующей: путеукладчик движется по готовой колее (квазистроке), создавая параллельно ее новую). После достижения зондом первого атома текущей квазистроки происходит "переключение" на последний атом следующей квазистроки.
Если за элементарную затравку принять произвольный атом, то его обход даст изображение поверхности, развернутое по спирали, форма которого будет определяться формой ячейки, образуемой соседними атомами (см. фиг. 1a). Данный способ является самым простым способом сканирования, применяемым в описываемом изобретении.
Если в роли затравки используется одномерная прямолинейная (в некоторых случаях прямолинейная условно - см., например, фиг. 1d,e) цепочка атомов, то ее обход приведет к построению изображения в виде вытянутой спирали (см. фиг. 1b, d). Причем, если направление обхода в конце каждой "строки" (подцепочки атомов, сориентированной в процессе обхода по затравке) изменять на противоположное, то получим изображение поверхности, "развернутое" по квазистрокам (см. фиг. 1c,e) и расположенное в общем случае произвольно по отношению к осям манипулятора. Во всех способах после отыскания "следующего" атома цепочки "текущий" атом добавляется к цепочке и становится частью контура обхода.
Таким образом, независимо от способа связывания затравка играет роль исходного задающего элемента. Ее длина фактически определяет размер скана, а ориентация - его положение относительно системы координат манипулятора (см. фиг. 1b,c,d,e).
В заявляемом изобретении в зависимости от решаемой экспериментальной или технологической задачи позиционирование зонда осуществляется двумя способами, которые отличаются тем, что в первом из них требуется предварительное сканирования поверхности так, как это было кратко описано выше, а во втором - нет. Соответственно процесс позиционирования по второму способу требует существенно меньших затрат времени, обеспечивая при этом точное перемещение зонда в пределах диапазона сканера. Фактически, второй способ позиционирования представляет собой процесс образования затравки, описание которого будет дано ниже.
В первом способе позиционирование осуществляется только в пределах отсканированного участка поверхности. Для выполнения перемещения из всей цепочки выделяется такая подцепочка (прокладывается маршрут), которая соединяет текущую позицию зонда с конечной желаемой любой задаваемой экспериментатором траекторией. Далее, производя на каждом шаге пути сканирование апертуры и распознавание ближайших соседей, зонд перемещается в ту позицию, которая соответствует данным выбранного маршрута. Процесс выполняется до тех пор, пока зонд не достигнет конечной особенности траектории. Если далее требуется выполнить более точное позиционирование в пределах окрестности конечной особенности, то оно осуществляется перемещением зонда относительно положения этой особенности, но на время, за которое совместное действие крипа и дрейфа не приведет к потере данной особенности в очередном цикле привязки зонда. Отметим, что реальный путь, проходимый зондом, представляет собой аппроксимацию заданной траектории ломаной линией, пролегающей через "центры тяжести" особенностей.
Итак, способ прецизионного сканирования и позиционирования заключается в выполнении следующих действий:
1. Периодической привязки зонда микроскопа к "текущему" атому поверхности.
Функция привязки позволяет удерживать зонд над выбранным атомом поверхности в течение практически неограниченного отрезка времени. Она устраняет влияние латерального термодрейфа микроскопа и ползучести X, Y-пьезоманипуляторов и фактически представляет собой цифровую следящую систему в латеральной плоскости, реализованную программно. В роли "датчиков" положения выступают локальные особенности поверхности, относительное расстояние между которыми в результате многократного усреднения может быть измерено точно (см. пункт 4 способа).
Действия по привязке активизируются автоматически по прошествии определенного промежутка времени T, измеряемого по показаниям системного таймера управляющего компьютера и связанного с величиной полного мгновенного дрейфа микроскопа. Под полным дрейфом микроскопа или просто под дрейфом будем понимать далее итог совместного действия термодрейфа и ползучести.
Интервал T определяется по результатам измерения дрейфа, который меняется во времени и зависит как от конкретной конструкции микроскопа, так и от условий проведения эксперимента. Сравнивая абсолютные координаты текущего атома цепочки с полученными в предыдущем цикле привязки и используя заданные пороги, интервал T либо увеличивается на дискрету, если дрейф мал, либо уменьшается, если он велик, либо остается без изменения (зона нечувствительности характеристики управления), если величина дрейфа находится в пределах допуска. Поэтому, чем меньше скорость дрейфа, тем реже будет производиться включение функции привязки, тем быстрее в целом будет происходить сканирование. Таким образом, в способе осуществляется автоматическая подстройка к изменяющейся величине дрейфа и учет временных колебаний последнего.
Для выполнения привязки вначале осуществляется строчное сканирование квадрата окрестности, в дальнейшем называемого сегментом, текущего атома, затем полученное изображение подвергается процедуре распознавания [5], после чего среди распознанных атомов находится "текущий" (расположенный ближе всех к центру растра), в конце зонд микроскопа перемещается в центр "текущего" атома.
2. Сканирования апертуры и распознавания ближайших соседей.
В данной операции вначале выполняется обычная строчная развертка поверхности в пределах заданного квадратного окна (2Rx2R), охватывающего с некоторым запасом ближайших к текущему атому соседей. Хотя фактически сканирование выполняется внутри квадратного окна, последующая работа с изображением поверхности осуществляется внутри вписанного в него круга радиуса R, в дальнейшем называемого апертурой. После этого производится распознавание соседей и определение их координат относительно центра апертуры.
3. Определения следующего атома цепочки (локального связывания особенностей).
При создании затравки вначале из списка соседей удаляется "предыдущий" атом, а затем, производится поиск такого атома, который располагается под наименьшим углом к прямой, задающей направление движения. Найденный атом получает ярлык "следующий". Причем при перемещении вдоль кристаллографического направления положение следующего атома цепочки используется для уточнения направления движения, если изменение локальной кривизны цепочки лежит в заданных пределах. Таким образом, указанный прием позволяет удерживать выбранное направление, легко минуя те места на поверхности кристалла, где расположены точечные или линейные дефекты решетки.
В случае, когда выполняется обход контура с присоединением, вначале из списка распознанных в апертуре атомов-соседей удаляется предыдущий атом, затем выполняется сортировка: среди атомов выбираются те, что не принадлежат к уже пройденной цепочке. После чего среди отобранных ищется тот, что расположен под наибольшим (наименьшим) углом (отсчет угла в обоих случаях производится вокруг "текущего" атома в направлении против часовой стрелки) к отрезку, соединяющему текущий и предыдущий атомы при обходе контура цепочки против часовой стрелки (по часовой стрелке). Найденный таким образом атом принимается за следующий атом цепочки.
Принципиальным и наиболее существенным недостатком способа образования скана поверхности путем обхода контура с присоединением является невозможность, начиная с некоторой длины цепочки, правильно выполнить сортировку атомов-соседей. Причина заключается в погрешности, накапливаемой в цепочке. Причем, чем больше шумы и дрейфы микроскопа, тем при некотором разумном числе усреднений быстрее наступает указанное ограничение, а следовательно, и ограничение на максимальный размер скана, который можно получить на данном микроскопе. Для того чтобы подавить аккумуляцию погрешности, следует при добавлении новых звеньев цепочки выполнять коррекцию путем "растворения" невязки на участке цепи от предыдущего атома до одного из обнаруженных атомов-соседей, включенных в цепь на предыдущем витке.
В качестве альтернативного способа, позволяющего избежать ошибок сканирования, связанных с накоплением погрешностей в цепочке, может быть предложено упомянутое ранее связывание с испольэованием вспомогательных квазистрок (см. фиг. 2). Основная идея, лежащая в его основе, заключается в том, чтобы в операции сортировки соседей потенциально принимало бы участие как можно меньшее число элементов цепочки, то есть чтобы просмотр цепочки осуществлялся бы на минимально возможную глубину. С этой целью из соседей текущего атома текущей квазистроки образуется группа, куда входят атомы, лежащие по одну определенную до начала сканирования сторону от квазистроки и не принадлежащие квазистроке. Для связывания смежных групп атомов-соседей, относящихся к смежным атомам в квазистроке, используется специальный атом квитирования.
Отметим, что если в операции связывания среди соседей не было найдено подходящих атомов, то производится увеличение радиуса апертуры и заново выполняется ее сканирование и анализ.
4. Измерения разностей и усреднения сегментов (скиппинга).
Данная операция предназначена для выполнения высокоточных измерений x, y, z координат атомов поверхности. Поскольку из-за наличия дестабилизирующих факторов точное измерение абсолютных координат атомов посредством усреднения невозможно независимо от того, работает механизм привязки или нет, то рассматриваемый прием производит измерение координат "следующего" атома цепочки относительно координат "текущего". Такой подход оправдан, поскольку дрейф в основном складывается из дрейфа головки СТМ, а он не приводит к относительному смещению соседних особенностей, та же часть, которая вноситься образцом путем уменьшения его размеров, может быть сделана ничтожно малой.
Вначале блокируется привязка зонда, поскольку теперь основная часть функций последней будет выполняться самой процедурой измерения разностей. Затем зонд микроскопа перемещается в позицию (абсолютную) следующего атома, после чего выполняется обычное строчное сканирование квадрата (mxm) его окрестности - сегмента. После этого осуществляется распознавание следующего атома. Определив его координаты, процедура вычисляет и усредняет разности Δx,Δy,Δz, а затем выполняет перемещение иглы СТМ обратно в позицию текущего атома, после чего производит там действия, аналогичные тем, которые она проделала только что со следующим атомом. Найдя координаты (абсолютные) текущего атома, процедура снова вычисляет и усредняет разности координат между атомами.
Далее описанная выше последовательность действий, называемая скиппингом, повторяется столько раз, сколько усреднений (число усреднений принципиально ничем не ограничено) было задано. В конце привязка разблокируется, "следующему" атому присваивается тэг "текущий", а счетчик числа атомов цепочки увеличивается на единицу. Напомним, что относительные координаты для первого перемещения зонда в позицию следующего атома определяются сканированием и распознаванием в пределах круглой апертуры.
Если в течение цикла скиппинга изменение скорости дрейфа невелико, то наступает практически полная его компенсация. Пусть, например, составляющая дрейфа поверхности по x сонаправлена с составляющей перемещения по x зонда при переходе его от текущей особенности к следующей, тогда измеренная разность будет больше истинной, при движении в обратном направлении она окажется на ту же величину меньше. Следовательно, среднее значение этих разностей будет равно истинному расстоянию между данными особенностями. Что касается абсолютной величины дрейфа, то она может быть достаточно большой - лишь бы за время перемещения зонда от одной особенности к другой последняя оказывалась бы каждый раз лежащей в пределах границ сегмента.
Отметим, что при перемещениях зонда между текущим и следующим атомами петля обратной связи всегда замкнута, а при сканировании окрестности в зависимости от установленного режима может быть как замкнута (режим "постоянного тока"), так и разомкнута (режим "постоянной высоты").
Помимо точного определения относительных координат следующего атома цепочки, во время скиппинга также выполняется усреднение сегментов поверхности, что позволяет эффективно бороться с шумами и достигать высокого разрешения в вертикальной плоскости.
Следует обратить внимание на то, что размер сегмента должен выбираться таким образом, чтобы сегменты соседних атомов немного перекрывали бы друг друга. Это требуется для того, чтобы после выполнения "сборки" полученная поверхность не имела бы разрывов.
Если дрейф во время сканирования был не очень сильным и/или требования к точности измерений не слишком высоки, то для последующей сборки поверхности сохраняются усредненные кусочки поверхности - сегменты и усредненные значения разностей, иначе в каждом цикле скиппинга сохраняются однократные измерения абсолютных координат "текущего" и "следующего" атомов вместе с соответствующими однократно измеренными сегментами.
Дело в том, что сканер "привязан" к поверхности и, следовательно, дрейфует вместе с ней, перемещаясь по полю сканирования, в каждой точке которого действуют разные калибровочные коэффициенты и углы косости. Поэтому, чтобы избежать ошибок при усреднении, вначале следует, используя калибровочную сетку, исправить абсолютные координаты и сегменты. Сделать это во время сканирования невозможно из-за того, что задача поиска в калибровочной сетке, аппроксимации коэффициентов и, наконец, коррекции сегментов требуют значительных вычислительных ресурсов.
Поскольку определяемое в процессе выполнения скиппинга относительное расстояние между особенностями является действительным числом, изменяющимся по случайному закону, то, выполняя большое количество измерений разностей и сегментов и вводя в изображение на этапе сборки реальной поверхности больше пикселей, возможно реконструировать рельеф (предполагается, что игла достаточно острая), предельные латеральные подробности в котором будут мельче, чем те, что способен обнаружить используемый микроскоп при обычном сканировании.
Следует сказать несколько слов о вычислении абсолютных положений атомов ("текущего" и "следующего") в вертикальной плоскости, которые определяются как среднее в задаваемой круговой окрестности атома. Понятно, что получаемые таким способом значения z координат атомов скорее всего слабо отражают действительные их положения, но вполне пригодны для получения относительных координат, используемых как при построении стилизованной поверхности, так и реальной, складываемой из сегментов.
Отметим, что в описываемом способе сканирования в каждый момент времени существует не более одного атома, имеющего абсолютные координаты. Координаты остальных атомов цепочки - относительные. Хотя при сильном дрейфе относительные координаты содержат погрешности и для особо точных измерений непригодны, между тем осуществить связывание, а также проложить маршрут при позиционировании с их помощью можно без труда.
Правильная калибровка микроскопа позволяет на этапе сборки поверхности устранить искажения, вызываемые нелинейностью манипуляторов, их неортогональностью и паразитным воздействием друг на друга. Процедура калибровки заключается в сканировании предложенным способом эталонной поверхности, в роли которой может выступать, например, ВОПГ, и определении для каждого абсолютного положения особенности в скане локальных калибровочных коэффициентов и локального угла косости (необходим для учета кауплинга типа X<------>Y). В результате получаем распределение (сетку) калибровочных коэффициентов и углов косости в пространстве сканирования. Поскольку влияние термодрейфа и крипа подавляется в процессе измерения, то калибровочная сетка оказывается не зависимой от скорости сканирования и его направления.
Рассмотрим калибровку сканера в латеральной плоскости, она осуществляется по треугольникам [5], образуемым в апертуре рассматриваемой особенностью и ее ближайшими соседями (6 равносторонних треугольников для решетки графита). Если поверхность имеет небольшой тренд, то для некоторого фиксированного положения Z-манипулятора получаем распределение калибровочных коэффициентов  и углов косости α в плоском поле. Кроме нелинейности и неортогональности сканера, в найденном распределении также происходит учет паразитных связей типа: X<------>Y, Z--->X, Z--->Y.
и углов косости α в плоском поле. Кроме нелинейности и неортогональности сканера, в найденном распределении также происходит учет паразитных связей типа: X<------>Y, Z--->X, Z--->Y.
Для выполнения калибровки Z-манипулятора микроскопа требуется калибровочная структура, имеющая на поверхности не только систему особенностей с известным периодом, но и высотой (графит для этих целей не совсем годится, поскольку величина гофрировки поверхности в нем может сильно отличаться от опыта к опыту). Выполняя сканирование эталонной поверхности для разных положений Z-манипулятора, устанавливаемых грубой ступенью сканера, получаем распределение калибровочных коэффициентов 
 и углов косости α в пространстве. Помимо нелинейности в вертикальной плоскости, в найденной сетке будет учтен кауплинг типа X--->Z, Y--->Z, обычно проявляющийся на изображении наиболее сильно.
и углов косости α в пространстве. Помимо нелинейности в вертикальной плоскости, в найденной сетке будет учтен кауплинг типа X--->Z, Y--->Z, обычно проявляющийся на изображении наиболее сильно.
Для визуализации данных, полученных во время сканирования, требуется выполнить "сборку" реальной поверхности. В тех местах, где сегменты соседних атомов укладываются с небольшим перехлестом, рельеф усредняется. В процессе сборки, используя аппроксимированные калибровочные коэффициенты и угол косости, вычисляемые по значениям в сетке, ближайшим к текущему положению сегмента, производится коррекция этого положения, а также исправление диспропорции и косости изображения [5] в самом сегменте. В случае, когда особенности поверхности настолько велики, что сегменты оказываются заметно искажены нелинейностью и кауплингом манипуляторов, исправление изображения выполняется в каждой точке сегмента с использованием аппроксимированных калибровочных коэффициентов и углов косости, вычисляемых по значениям в сетке, ближайшим к данной точке.
Отметим, что результаты сканирования не зависят ни от типа элементарной ячейки, ни от ее размеров, ни от наличия дефектов или какой-либо разупорядоченности атомов на поверхности. Данные свойства получаются исключительно благодаря локальному связыванию особенностей поверхности.
Предлагаемый способ сканирования может быть отнесен к классу адаптивных, поскольку содержит звенья, обеспечивающие самонастройку процесса к текущим окружающим условиям, особенностям поверхности и конкретному оборудованию.
Следует отметить, что данное описание способа прецизионного сканирования и позиционирования предполагало использование фиксированного размера сегмента, задаваемого перед началом работы. В случае, когда расстояния между особенностями имеют большой разброс, размер сегмента становится переменным и должен определяться динамически в процессе сканирования.
Заложенные в способе приемы точного позиционирования зонда СТМ являются основой построения нанолитографов. Возможность автономно следовать вдоль цепочки атомов может использоваться для автоматического поиска на поверхности различных дефектов: вакансий, включений, моноатомных ступенек, областей разупорядоченности, областей с различными фазовыми состояниями, а также ведения их статистики. Причем траектория здесь может быть выбрана и случайной, для этого необходимо последовательно случайным образом устанавливать длину подцепочки и направление следования по ней.
Удерживая направление движения по цепочке атомов так, чтобы оно постоянно совпадало с кристаллографическим направлением на поверхности, по искривлению цепочки можно выявлять присутствие микродефектов и напряжений в кристаллическом теле.
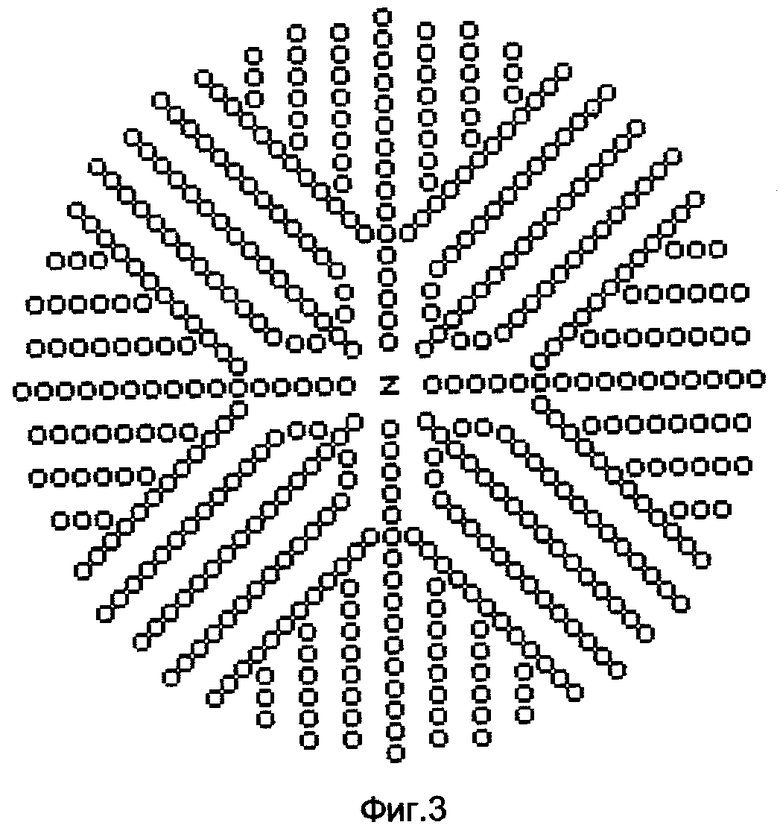
Еще одним полезным применением способа является автоматический возврат зонда в операционную зону. Данная функция необходима в экспериментах по нанолитографии, где после какого-либо воздействия зондом на поверхность образец извлекается из микроскопа, подвергается обработке (нанесение пленки, травление, отжиг и т.п.), а затем устанавливается обратно для того, чтобы увидеть, какие изменения произошли с поверхностью в месте воздействия. В подобных случаях для обеспечения автоматического поиска-перемещения к месту воздействия необходимо на исходной поверхности образца изготовить разветвленную систему цепочек из особенностей (см. фиг. 3), сходящихся к этому месту. Тогда достаточно "захватить" какую-либо особенность на краю поля, задать направление движения к зоне и дождаться момента, когда зонд дойдет до последнего элемента цепи. Момент прихода в зону соответствует отсутствию среди соседей "подходящей" следующей особенности (в данном режиме размер апертуры фиксирован).
На фиг. 1 проиллюстрированы простейшие способы локального связывания посредством обхода контура с присоединением. Затравка: (a) одиночный атом; (b), (c), (d), (e) одномерная прямолинейная цепочка из 10 атомов. Затравка ориентирована вдоль: (b), (c) кристаллографического направления; (d), (e) направления, составляющего с X-манипулятором угол 0o. Направление обхода контура: (a), (b), (d) фиксированное (против часовой стрелки); (c), (e) переменное (с переключением в конце каждой квазистроки).
На фиг. 2 схематично изображен способ локального связывания особенностей поверхности с использованием вспомогательных квазистрок.
На фиг. 3 дан пример изготавливаемой на поверхности образца системы сходящихся к месту воздействия цепочек из особенностей. Буквой Z помечена операционная зона.
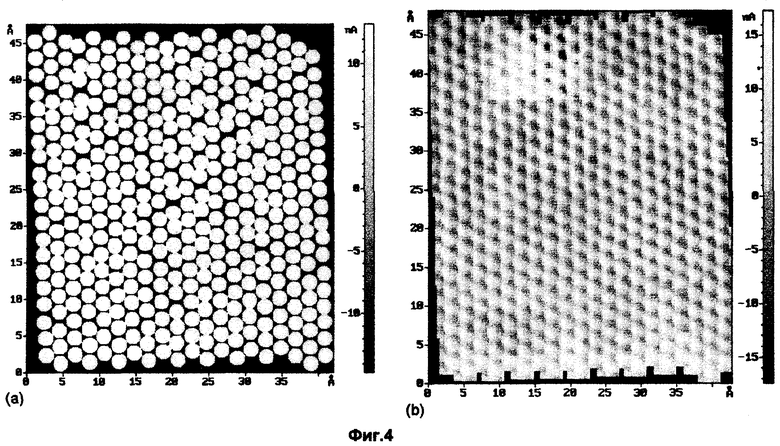
На фиг. 4 показан скан поверхности ВОПГ, полученный предлагаемым в изобретении способом. (a) Стилизованное изображение. Атомы углерода изображены условно в виде полусфер. (b) Реальная поверхность, реконструированная из сегментов (режим постоянной высоты: Iтун = 998 пА; Uтун = -10 мВ). Длина цепочки 400 атомов. Число усреднений в точке: 2. Количество усреднений сегмента: 5. Усредненная постоянная решетки a = b = 2,299  Скорость сканирования в апертуре: 10000
Скорость сканирования в апертуре: 10000  Скорость сканирования в сегменте: 500
Скорость сканирования в сегменте: 500  Скорость перемещения при скиппинге: 100000
Скорость перемещения при скиппинге: 100000  Средняя скорость латерального дрейфа около 0,5
Средняя скорость латерального дрейфа около 0,5  Интервал привязки зонда не более 500 мс. Время измерения: 23 мин.
Интервал привязки зонда не более 500 мс. Время измерения: 23 мин.
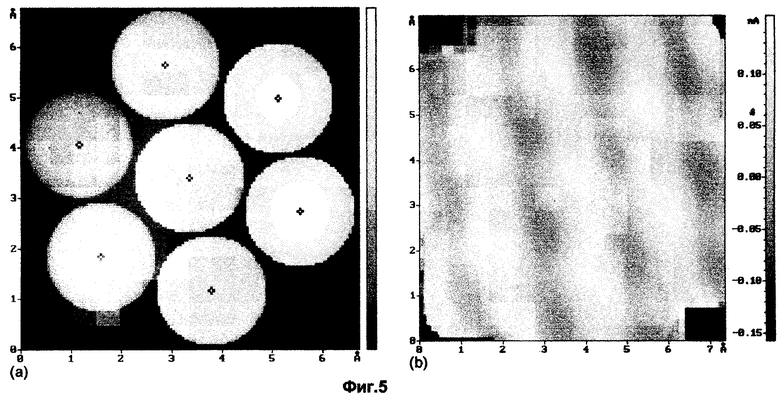
На фиг. 5 представлена поверхность ВОПГ, полученная в режиме высокого разрешения. (a) Стилизованное изображение. (b) Сегментное изображение (режим постоянной высоты, Uтун = 15 мВ, Iтун = 401 пА). Число усреднений в точке: 3. Количество усреднений сегмента: 1000. Усредненная постоянная решетки a = b = 2,299  Скорость сканирования в апертуре: 7500
Скорость сканирования в апертуре: 7500  Скорость сканирования в сегменте: 750
Скорость сканирования в сегменте: 750 Скорость перемещения между атомами цепи: 75000
Скорость перемещения между атомами цепи: 75000  Средняя скорость латерального дрейфа около 0,2
Средняя скорость латерального дрейфа около 0,2  Интервал привязки зонда не более 500 мсек. Время сканирования: 39 мин.
Интервал привязки зонда не более 500 мсек. Время сканирования: 39 мин.
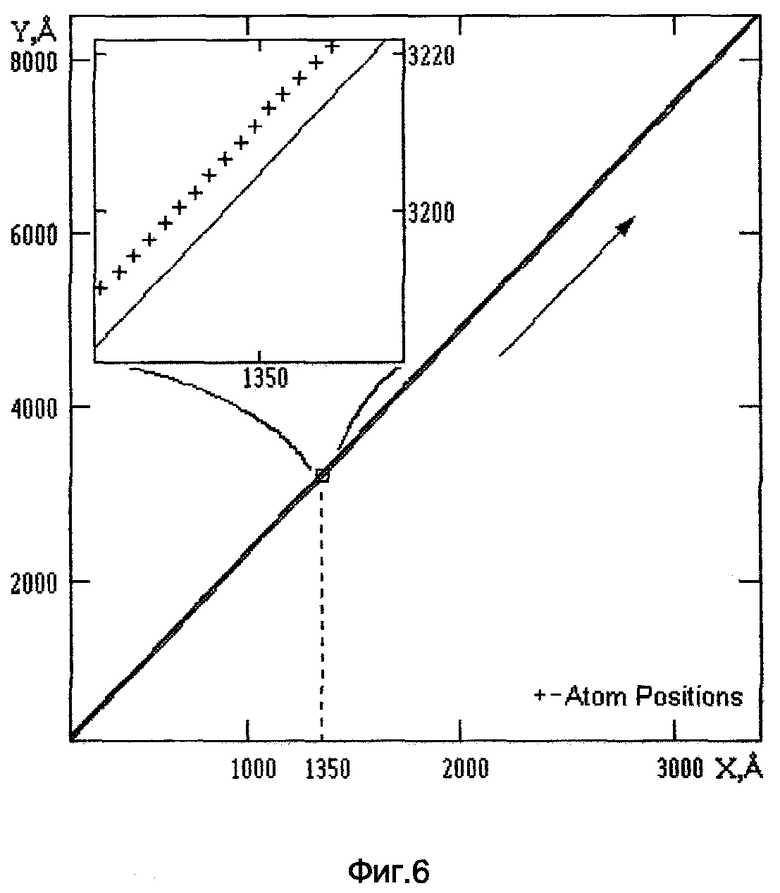
На фиг. 6 показано перемещение зонда СТМ по цепочке атомов в заданном направлении. Подрежим удержания направления - включен. Длина пройденного пути: 1 мкм. Число атомов в цепочке: 4060. Скорость перемещения: 3 атома/сек.
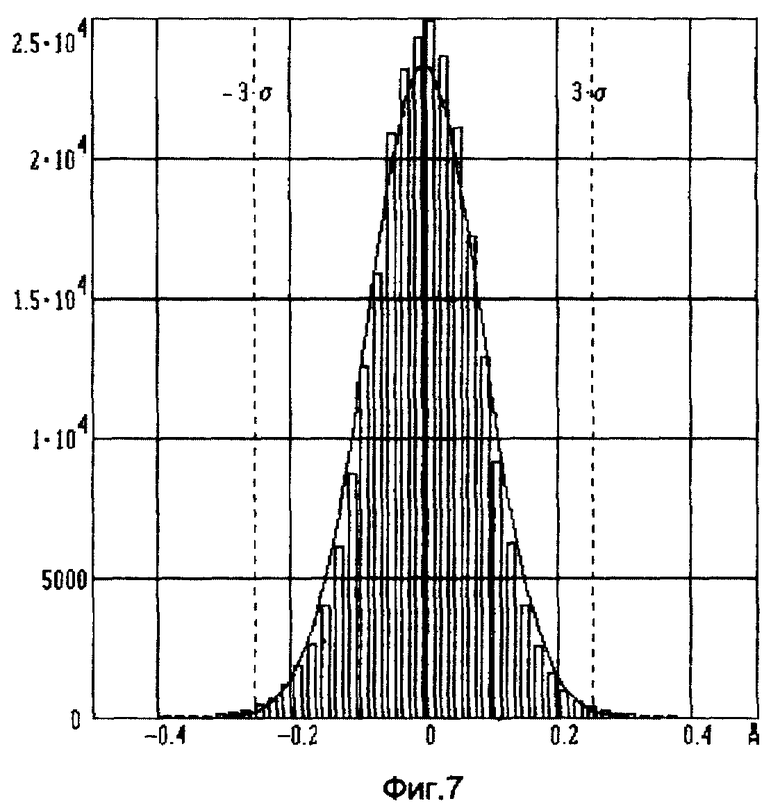
На фиг. 7 представлена гистограмма распределения погрешности измерения постоянной решетки ВОПГ. Количество измерений I = 2,5•105. Погрешность однократного измерения (3 σ): ±0,255  Коэффициент асимметрии ks = -0,09. Эксцесс kk = 1,27. Время измерения: 7 часов 30 мин.
Коэффициент асимметрии ks = -0,09. Эксцесс kk = 1,27. Время измерения: 7 часов 30 мин.
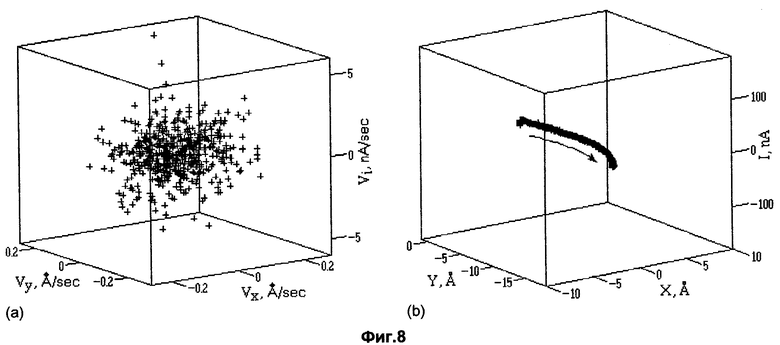
На фиг. 8 даны результаты измерения дрейфа СТМ. (a) Распределение векторов дрейфа в пространстве скоростей. Средняя и максимальная скорости дрейфа в латеральной плоскости: 0,120  и 0,334
и 0,334  соответственно. (b) Эволюция кончика зонда в пространстве (направление перемещения обозначено стрелкой). Вероятное направление дрейфа в латеральной плоскости: 269o. Вектора и положения зонда обозначены значком "+". Количество привязок зонда микроскопа: 500. Интервал времени между привязками T = 700 мсек.
соответственно. (b) Эволюция кончика зонда в пространстве (направление перемещения обозначено стрелкой). Вероятное направление дрейфа в латеральной плоскости: 269o. Вектора и положения зонда обозначены значком "+". Количество привязок зонда микроскопа: 500. Интервал времени между привязками T = 700 мсек.
Описанный способ прецизионного сканирования и позиционирования был реализован и опробован при работе с предельно различимыми сканирующим туннельным микроскопом структурными элементами поверхности - атомами.
Измерения выполнялись на сканирующем зондовом микроскопе Solver P4 фирмы NT-MDT на воздухе. В качестве управляющего использовался IBM совместимый компьютер 486DX4 100 МГц. Разрешение микроскопа в латеральной плоскости:  Число точек в апертуре: 27х27. Число точек в сегменте: 13х13. Иглой служила кусаная проволока NiCr, а размеры образца ВОПГ (0001) составляли (2х2х0,5) мм3.
Число точек в апертуре: 27х27. Число точек в сегменте: 13х13. Иглой служила кусаная проволока NiCr, а размеры образца ВОПГ (0001) составляли (2х2х0,5) мм3.
Выполняя локальное связывание особенностей с использованием вспомогательных квазистрок (длина квазистроки - 20 атомов, ориентация - вдоль оси X-пьезоманипулятора), было осуществлено сканирование поверхности ВОПГ (см. фиг. 4). "Рваные" края на изображении (b) выдают на его сегментную структуру. Из-за недостаточно высокого быстродействия управляющего компьютера, сильного дрейфа и небольшого числа усреднений звеньев цепи положения некоторых атомов в скане заметно смещены. Во время сборки поверхности исправление нелинейности, неортогональности и кауплинга не производилось. Артефакты, связанные с сегментной структурой изображения (b), практически отсутствуют. Следует обратить внимание на низкий уровень шума в сегментном изображении, хотя ни какой математической обработки данных не выполнялось.
Следующий опыт заключался в получении скана поверхности ВОПГ в режиме высокого разрешения (см. фиг. 5). Для каждого из 7 атомов углерода было выполнено по 1000 измерений сегмента и разностей. После сборки (коррекция нелинейности, неортогональности и кауплинга не производилась) латеральное разрешение микроскопа "улучшено" в 20 раз. Связывание выполнено путем обхода контура с присоединением. Тип затравки - одиночный атом. В верхнем левом и нижнем правом углах хорошо видны исходные размеры элементов изображения, соответствующие пределу разрешения микроскопа.
В качестве экспериментального подтверждения возможности прецизионного позиционирования на атомарно гладкой поверхности (способ позиционирования без предварительного сканирования поверхности), а также для демонстрации способности точно отмерять расстояния в несколько микрон, подсчитывая атомные периоды, на поверхности ВОПГ было выполнено перемещение иглы СТМ вдоль кристаллографического направления (см. фиг. 6), длина пройденного пути составила 1 мкм (4060 атомов углерода).
Для доказательства возможности выполнения с помощью предлагаемого способа высокоточных измерений расстояний и направлений на поверхности было осуществлено 250000 усреднений постоянной решетки ВОПГ. Для выполнения работы потребовалось 7,5 часов непрерывной работы СТМ, при этом погрешность измерения составила ±0,0005  На фиг. 7 показана функция распределения погрешности измерения постоянной решетки графита, там же для сравнения дана функция нормального распределения, построенная с использованием эмпирических значений среднего и среднеквадратического.
На фиг. 7 показана функция распределения погрешности измерения постоянной решетки графита, там же для сравнения дана функция нормального распределения, построенная с использованием эмпирических значений среднего и среднеквадратического.
Для измерения дрейфа микроскопа была выполнена последовательность привязок зонда к выбранному атому на поверхности графита. В процессе слежения за атомом по его перемещению определялся вектор дрейфа, т.е. направление дрейфа и его скорость (величина смещения, отнесенная к интервалу привязки T). На фиг. 8a показано пространственное распределение полученных векторов дрейфа. На фиг. 8b представлена траектория движения кончика зонда (атома привязки) в пространстве за время измерения. Средняя скорость дрейфа микроскопа в латеральной плоскости составила около 0,12  Вероятное латеральное направление дрейфа: 269o. Близость вероятного направления дрейфа к направлению "медленного" сканирования указывает на присутствие значительной составляющей крипа Y-манипулятора.
Вероятное латеральное направление дрейфа: 269o. Близость вероятного направления дрейфа к направлению "медленного" сканирования указывает на присутствие значительной составляющей крипа Y-манипулятора.
Источники информации
[1] J.E. Griffith, G.L. Miller, C.A. Green, D.A. Grigg, P.E. Russell, A scanning tunneling microscope with a capacitance-based position monitor, J. Vac. Sci. Technol. B, vol. 8, N 6, p. 2023, 1990.
[2] R.C. Barrett, C.F. Quate, Optical scan-correction system applied to atomic force microscopy, Rev. Sci. Instrum., vol. 62, N 6, p. 1393, 1991.
[3] H. Kawakatsu, Y. Hoshi, T. Higuchi, H. Kitano, Crystalline lattice for metrological applications and positioning control by a dual tunneling-unit scanning tunneling microscope, J. Vac. Sci. Technol. B, vol. 9, N 2, p. 651, 1991. H. Kawakatsu, H. Kougami, Automated calibration of the sample image using crystalline lattice for scale reference in scanning tunneling microscopy, J. Vac. Sci. Technol. B, vol. 14, N 1, p. 11, 1996. H. Zhang, F. Huang, T. Higuchi, Dual unit scanning tunneling microscope-atomic force microscope for length measurement based on reference scales, J. Vac. Sci. Technol. B, vol. 15, N 4, p. 780, 1997.
[4] J.E. Griffith, D.A. Grigg, Dimensional metrology with scanning probe microscopes, J. Appl. Phys., vol. 74, N 9, p. 83, 1993.
[5] R.V. Lapshin, Automatic lateral calibration of tunneling microscope scanners, Rev. Sci. Instrum. , vol. 69, N 9, p. 3268, 1998. Р.В. Лапшин, Процедура распознавания атомов в СТМ изображениях, Труды третьей международной научно-технической конференции "Микроэлектроника и информатика", выпуск 3, Москва, Зеленоград, 1998.
Изобретение относится к электронно-измерительной технике и предназначено для использования в зондовом сканирующем устройстве. Сущность: способ заключается в использовании особенностей поверхности в качестве опорных точек при выполнении перемещений. Перемещения осуществляются от одной особенности к другой, расположенной по соседству. В результате образуется связанная цепочка, в которой особенности размещены относительно друг друга. Поиск, обнаружение и вычисление координат положения особенности выполняет программа распознавания. Сканируя небольшую область вокруг каждой особенности, а затем раскладывая полученные фрагменты поверхности по соответствующим позициям, определенным при распознавании, можно реконструировать реальный рельеф поверхности. Наличие информации о координатах положения особенностей вместе с механизмом привязки позволяет осуществлять прецизионное позиционирование зонда. Технический результат: повышение точности и линейности измерения рельефа поверхности, улучшение разрешающей способности прибора, а также осуществление прецизионного позиционирования зонда. 2 з.п.ф-лы, 8 ил.
| СПОСОБ РЕГИСТРАЦИИ РЕЛЬЕФА ПОВЕРХНОСТИ ОБРАЗЦА РАСТРОВЫМИ ТУННЕЛЬНЫМИ МИКРОСКОПАМИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2020405C1 |
| Приспособление в пере для письма с целью увеличения на нем запаса чернил и уменьшения скорости их высыхания | 1917 |
|
SU96A1 |
| EP 736746 B1, 09.10.1996. | |||

