Изобретение относится к электронно-вычислительной технике и предназначено для использования в зондовом запоминающем устройстве (ЗЗУ) большой емкости, в роли которого, в зависимости от свойств запоминающей среды и требуемого разрешения, выступает сканирующий туннельный микроскоп (СТМ), атомно-силовой микроскоп (АСМ), сканирующий оптический микроскоп ближнего поля и т.п.
Известны способы считывания данных, используемые в накопителе на жестком магнитном диске (винчестере) [1], устройстве проигрывания компакт (CD-ROM) [2] и цифровых видеодисков (LV, DVD) [2], а также в зондовом запоминающем устройстве [3, 4].
Одной из проблем, возникающих при считывании данных в ЗУ большой емкости, таких как винчестерский накопитель [1], CD-ROM или DVD [2], является проблема удержания головки чтения/записи на информационной дорожке [1, 2]. Дело в том, что при большой плотности записи информации характерное расстояние между соседними битами и их собственные размеры уменьшаются на столько, что на работу устройства начинают влиять многочисленные дестабилизирующие факторы (внутренние и внешние вибрации, дрейфы, шумы, дефекты носителя), нарушающие правильное позиционирование головки и приводящие к ошибкам считывания и записи.
Для подавления нестабильностей в устройствах [1, 2] используются следующие приемы: ужесточение допусков на механические части устройства и/или введение активных замкнутых следящих систем. Оба пути сопряжены с техническими трудностями и приводят к резкому увеличению стоимости изделия. Поскольку в первом случае предъявляются жесткие требования к механообработке, юстировке, в конструкцию включаются дополнительные элементы, компенсирующие погрешности и износ устройства во время эксплуатации. Во втором случае в систему встраиваются, как минимум, три высокочувствительных датчика положения (два, обеспечивающих позиционирование в латеральной плоскости, и один - в вертикальной), три манипулятора, а также управляющая электроника.
Положение усугубляется в случае, когда ЗУ имеет несколько рабочих поверхностей и, следовательно, несколько головок (см. [1]). Использование в качестве ЗУ большой емкости сканирующего зондового микроскопа тормозится по причине относительно невысокого быстродействия последнего. Поэтому в настоящее время для увеличения скорости обмена информацией рассматриваются варианты создания интегральной головки чтения/записи, представляющей собой либо линейку [5], либо матрицу [6, 7], насчитывающую от нескольких десятков до нескольких сотен зондов. Однако использование в предлагаемых микроконструкциях большого количества высокоточных датчиков и замкнутых следящих систем является на сегодняшний день весьма проблематичным.
Следует также отметить, что одной из причин, препятствующих устойчивой работе существующих способов считывания, является возникновение паразитного взаимовлияния между системами вертикального и латерального слежения. Традиционно для выполнения развязки требуется создание сложной конструкции головки и привода и/или введение достаточно громоздких схем разделения сигналов [2].
Другой особенностью является невозможность в рамках аналоговых систем управления применить сложные корректирующие работу следящих систем звенья, необходимость в которых возникает при переходе к все более малым размерам элементов памяти, что непосредственно сказывается на качестве управления: растет вероятность неправильного считывания, уменьшаются предельная плотность записи и реальное быстродействие устройства, увеличивается число столкновений зонда с поверхностью, от чего его острота ухудшается, а износ носителя происходит интенсивнее и т.п.
В качестве прототипа изобретения взят способ считывания, применяемый в ЗЗУ [4]. Способ базируется на работе двух аналоговых следящих систем: одной в вертикальной плоскости, обеспечивающей постоянную величину зазора между зондом и поверхностью носителя, а другой в горизонтальной плоскости, предназначенной для удержания зонда на информационной дорожке. Следящие системы содержат датчики положения, позиционер, выполняющий перемещение зонда в вертикальном, радиальном направлениях, а также электронику управления.
Следящая система в вертикальной плоскости построена на тех же принципах, что и в АСМ, где она обеспечивает постоянство силы (притяжения или отталкивания), возникающей между иглой, расположенной на упругом кантилевере (миниатюрной балке), и поверхностью во время сканирования. В качестве датчика перемещения, в отличие от обычно используемой в АСМ пары полупроводниковый лазер - двухсекционный диод, применен пьезорезистивный элемент, расположенный на поверхности кантилевера и изготовленный по сложной микротехнологии.
Следящая система в горизонтальной плоскости не способна стабилизировать положение зонда в тангенциальном направлении, в качестве исходной информации она использует сигнал только от пьезорезистивного датчика радиального положения (носитель информации выполнен в виде диска, цифровые данные на его поверхности представляют собой рельефные элементы, уложенные в концентрические дорожки), который возникает тогда, когда зонд запоминающего устройства "съезжает" с дорожки (в этот момент происходит кручение кантилевера под действием боковых сил). Датчик радиального положения, так же как и датчик вертикального положения, изготовлен методами микротехнологии и размещен на кантилевере.
Развязка пьезорезистивных датчиков и, следовательно, следящих систем, необходимая для снижения паразитного влияния их друг на друга вo время работы ЗЗУ, выполнена в большей степени конструктивно посредством расположения датчиков на кантилевере строго во взаимно перпендикулярных плоскостях. Поскольку в системе считывания имеется еще и манипулятор, перемещения которого в направлениях х, у, z также приводят к взаимовлиянию систем слежения, задачу развязки в прототипе нужно считать решенной лишь частично.
Недостатками используемого в прототипе способа считывания являются:
1) применение сложного в изготовлении датчика радиального положения зонда;
2) отсутствие следящей системы удержания зонда в тангенциальном направлении;
3) необходимость в схеме развязки сигналов следящих систем;
4) необходимость в электронной схеме выделения информационного сигнала от элемента памяти (обычно это высоко чувствительные компараторы и схемы, осуществляющие заполнение и подсчет импульсов).
Основное достоинство заявляемого способа считывания - простота, поскольку для своей реализации он не требует прецизионных датчиков радиального и тангенциального положения и управляющей этими датчиками электроники, изготовления сложного кантилевера, схем развязки сигналов следящих систем, схемы считывания информационного сигнала от элемента памяти и фактически позволяет ограничиться при создании ЗЗУ только стандартными узлами микроскопа, что безусловно должно сильно отразиться на себестоимости изделия. Отсутствие дополнительных механических и электрических компонентов улучшает такую характеристику устройства как его надежность.
В общем случае для реализации предлагаемого способа считывания устройство должно обладать зондом (головкой) чтения/записи, иметь позиционер, способный осуществлять сканирование поверхности носителя информации, а цифровые данные должны располагаться на носителе таким образом, чтобы образовывать некоторую систему информационных дорожек.
Элементы рельефа, называемые далее элементами памяти, интерпретируются как биты хранимой в ЗЗУ цифровой информации. В качестве элементов памяти могут выступать как изменения рельефа типа "холм", так и типа "яма". Основная идея предлагаемого способа считывания состоит в локальном сканировании и распознавании элементов памяти на поверхности носителя с последующей привязкой к ним зонда устройства с целью удержания его на информационной дорожке. Заявляемый способ представляет собой цифровую следящую систему в латеральной плоскости, реализованную программно. Поскольку в данном способе производится распознавание сосканированного изображения, то рельефные элементы следует понимать в широком смысле. Физически они могут представлять собой области намагниченности, места локализации электрического заряда и т. п.
Хотя форма элементов, их ориентация и размеры в используемом ниже процессе распознавания значения не имеют, но в общем случае могут участвовать в кодировании информации (для этого алгоритм распознавания должен быть дополнен соответствующими процедурами анализа формы, ориентации и размера). За счет кодирования посредством задания разной формы элемента памяти, его ориентации и размера возможно дополнительное увеличение плотности хранимой информации.
Для обеспечения высокого отношения сигнал/шум элементы памяти должны обладать достаточной высотой (глубиной) для того, чтобы их можно было с минимальным числом ошибок выделять на фоне остального рельефа поверхности.
Рассмотрим информационную дорожку (см. фиг. 1) с простейшей организацией, в которой элементы памяти, хранящие биты полезной информации in, разделены элементами синхронизации sn, используемыми для привязки зонда. Для определенности положим элементы памяти круглыми, ориентация в этом случае теряет смысл, а размеры как информационных элементов, так и элементов синхронизации выбираются согласно ограничениям микроскопов по разрешению, а также ограничениям, связанным с требованиями технологии изготовления носителя информации.
Итак, предлагаемый способ считывания заключается в выполнении следующих действий.
1. Производится строчное сканирование прямоугольной окрестности, называемой в дальнейшем апертурой, текущего элемента синхронизации sn.
2. Выполняется процедура распознавания [8] элементов, попавших в апертуру.
3. По положению элементов в апертуре производится их дискриминация на информационный элемент in+1 и элемент синхронизации sn+1. Элемент, лежащий ближе всего к верхнему краю апертуры, принимается за следующий элемент синхронизации. Если кроме синхроэлемента ничего больше не обнаружено, то в данном месте хранится, например, логический ноль, иначе - логическая единица.
4. Считанное устройством значение информационного элемента запоминается, и описанный выше процесс повторяется.
Размеры прямоугольной апертуры выбираются таким образом, чтобы при возникновении в процессе считывания самых больших отклонений зонда от дорожки (отклонения отсчитываются от позиции текущего синхроэлемента) как в направлении х, так и в направлении у, апертура все еще охватывала бы следующую пару элементов. Указанное условие также определяет то, через какое максимальное число информационных элементов должен следовать очередной элемент синхронизации.
Применение элементов синхронизации нельзя считать эффективным ни с точки зрения достижения предельной скорости считывания, ни с точки зрения использования полезной площади носителя, поскольку и то и другое уменьшается в этом случае на половину. Поэтому желательно, чтобы синхроэлементы попадались реже, либо были бы исключены совсем. Отказ от синхроэлементов возможен на стабильных аппаратах, он приводит к необходимости использовать специальную систему кодирования на основе бинарных последовательностей с ограниченными длинами серий [9], гарантирующую появление особенности (логической единицы) на определенном интервале длины (последовательность логических нулей).
Теперь опорными элементами дорожки могут быть только элементы памяти, интерпретируемые как информационные битовые единицы. Число следующих друг за другом нулей определяется расстоянием, измеренным между соседними единицами. Размер апертуры вдоль оси у манипулятора становиться переменным, он увеличивается каждый раз на некоторую фиксированную величину, если после выполнения распознавания бинарная единица все еще не обнаружена. После считывания очередной порции данных апертура принимает исходный размер, который соответствует среднестатистическому расстоянию между соседними единицами в используемом коде.
Сказанное можно резюмировать в виде данной ниже последовательности действий, именуемой модифицированным способом считывания.
1. Производится сканирование апертуры (или приращения апертуры) текущего элемента памяти.
2. Выполняется распознавание элементов, находящихся в апертуре (или в приращении апертуры).
3. По положению в апертуре выявляется следующий элемент памяти, он лежит дальше всех от верхнего края апертуры. Если следующий элемент памяти не был обнаружен, то апертура получает некоторое приращение Δy, для которого выполняются пункты 1, 2 способа. Если же следующий элемент памяти был обнаружен, то по расстоянию от него до нижнего края апертуры, которое кратно принятому в данной системе расстоянию для логического нуля, определяется число логических нулей.
4. Считанный устройством фрагмент двоичного кода запоминается, и описанный выше процесс повторяется.
До сих пор говорилось о том, каким образом может быть организовано считывание информации, но предложенные приемы также могут быть использованы и при записи. Понятно, что описанный способ чтения практически полностью переложим на режим записи в случае, когда она производиться на предварительно размеченную поверхность, т.е. на поверхность, где уже сформированы рельефные элементы, интерпретируемые как биты синхронизации.
В случае, когда предварительной разметки всей поверхности носителя нет, для осуществления записи достаточно создать на носителе так называемую затравочную дорожку. В процессе записи позиционирование зонда выполняется путем чтения-перемещения по элементам записанной ранее дорожки так, как это было показано выше, а собственно запись производится на текущей дорожке относительно элементов предыдущей.
Предлагаемый способ считывания благодаря врожденному цифровому характеру позволяет повысить вероятность правильного считывания/записи (помехозащищенность) путем использования дополнительной цифровой обработки изображения (повторное считывание с усреднением, различные виды сглаживания, методы повышения контраста и обнаружения края особенности и др.), а также улучшить качество управления введением цифровых корректирующих фильтров, что либо очень сложно, либо вообще невозможно сделать, оставаясь в рамках аналоговой системы управления. Одной из особенностей заявляемого способа считывания является то, что в любой момент можно прекратить движение зонда вдоль информационной дорожки, привязавшись к текущему элементу памяти, и оставаться в таком состоянии произвольно долго.
На фиг. 1 показано возможное устройство информационной дорожки ЗЗУ. Информационные элементы in разделены элементами синхронизации sn. Знаком "+" помечены положения синхроэлементов, относительно которых производится локальное позиционирование прямоугольной апертуры.
На фиг. 2 изображено перемещение зонда СТМ вдоль кристаллографического направления по цепочке из 2048 атомов углерода, выступающих в роли синхроэлементов битовой дорожки. Атомы, расположенные между синхронизирующими, являются информационными (не показаны), в данном случае все они - логические единицы. Длина пройденного пути ≈1 мкм. Скорость считывания составила 33 инфоатома/с. Число потерь дорожки 0. Стрелкой показано направление движения зонда.
На фиг. 3 показана характерная апертура размером (13•18) точек2. Изображение сглажено. Атом углерода в верхней части апертуры играет роль синхроэлемента, в нижней части - инфоэлемента. Режим постоянной высоты Uтун=50 мВ, Iтун=993 пА. Скорость сканирования 294 нм/с.
Данный способ считывания был успешно реализован и опробован при работе с предельно различимыми сканирующим туннельным микроскопом структурными элементами поверхности - атомами. В частности, на поверхности высоко ориентированного пиролитического графита (ВОПГ) было выполнено перемещение (см. фиг. 2) по атомам углерода на расстояние чуть более микрона вдоль кристаллографического направления, симулирующее собой считывание с информационной дорожки. Скорость считывания составила 33 инфоатома/с.
Опыты проводились на микроскопе Solver P4 производства НТ-МДТ на воздухе. Иглой служила механически срезанная проволока NiCr. Разрешение микроскопа 0,296  вдоль оси х и 0,298
вдоль оси х и 0,298  вдоль оси у. В качестве управляющего использовался IBM-совместимый компьютер на базе процессора i486DX4 100 МГц, развивающий среднюю скорость распознавания 455 апертур/с.
вдоль оси у. В качестве управляющего использовался IBM-совместимый компьютер на базе процессора i486DX4 100 МГц, развивающий среднюю скорость распознавания 455 апертур/с.
Перед началом считывания образец был сориентирован таким образом, чтобы одно из кристаллографических направлений на поверхности оказалось параллельно у манипулятору прибора (остаточная непараллельность около 3o). Величина перекрытия смежных апертур 4 пикселя. Средняя скорость дрейфа в латеральной плоскости во время измерений составляла около 0.3  Нестабильность положения апертуры в направлении поперек и вдоль дорожки ±0.2 и ±0.4
Нестабильность положения апертуры в направлении поперек и вдоль дорожки ±0.2 и ±0.4  за локальный скан соответственно. Среднеквадратическое значение шума в вертикальной плоскости равнялось ±16 пА.
за локальный скан соответственно. Среднеквадратическое значение шума в вертикальной плоскости равнялось ±16 пА.
В целом, полученные результаты доказывают возможность устойчивого слежения за информационной дорожкой минимальной ширины и достаточно надежного считывания данных с носителей, в качестве элементов памяти которых выступают отдельные атомы. Оценки показывают, что при использовании быстродействующего специализированного микроскопа и контроллера, построенного на процессоре с тактовой частотой не менее 500 МГц, возможно доведение скорости считывания атомного ЗЗУ до 1 кбит/с.
Использованные источники информации
1. Е. Grochowski, R. F. Hoyt, Future trends in hard disk drives, IEEE Trans. Magnetics, vol. 32, 3, р. 1850, 1996.
2. G. Bouwhuis, J. Braat, A. Huijser, J. Pasman, G. van Rosmalen, K. Schouhamer Immink, Principles of Optical Disc Systems, Adam Hilger Ltd., Bristol and Boston, 1985.
3. H. J. Mamin, В.D. Terris, L.S. Fan, S. Hoen, R.C. Barrett, D. Rugar, High-density data storage using proximal probe techniques, IBM J. Res. Dev., vol. 39, 6, p. 681, 1995. S. Hosaka, SPM based storage, IEEE Trans. Magnetics, vol. 32, 3, p. 1873, 1996.
4. B.W. Chui, H.J. Mamin, B.D. Terris, D. Rugar, T.W. Kenny, Sidewall-implanted dual-axis piezoresistive cantilever for AFM data storage readback and tracking, IEEE Proceedings of the Eleventh Annual International Workshop on Micro Electro Mechanical Systems, p. 12, 1998.
5. S.С. Minne, Ph. Flueckiger, H.T. Soh, C.F. Quate, Atomic force microscope lithography using amorphous silicon as a resist and advances in parallel operation, J. Vac. Sci. Technol. B, vol. 13, 3, p. 1380, 1995.
6. S. A. Miller, К. L. Turner, N.С. MacDonald, Microelectromechanical scanning probe instruments for array architectires, Rev. Sci. Instrum., vol. 68, 11, p. 4155, 1997.
7. M. Lutwyche, С. Andreoli, G. Binnig, J. Brugger, U. Drechsler, W. Haeberle, H. Rohrer, H. Rothuizen, P. Vettiger, Microfabrication and parallel operation of 5х5 2D AFM cantilever arrays for data storage and imaging, IEEE Proceedings of the Eleventh Annual International Workshop on Micro Electro Mechanical Systems, p. 8, 1998.
8. R. V. Lapshin, Automatic lateral calibration of tunneling microscope scanners, Rev. Sci. In-strum., vol. 69, 9, p. 3268, 1998.
Р. В. Лапшин, Процедура распознавания атомов в СТМ изображениях, Третья международная научно-техническая конференция "Микроэлектроника и информатика", Москва, Зеленоград, 1997.
9. G.F.M. Beenker, К.A. Schouhamer Immink, A generalized method for encoding and decoding run-length-limited binary sequences, IEEE Trans. Inform. Theory, vol. 29, 5, p. 751, 1983.
D. T. Tang, L.R. Bahl, Block codes for a class of constrained noiseless channels, Inform. Control vol. 17, p. 436, 1970.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ РЕЛЬЕФА ПОВЕРХНОСТИ СКАНИРУЮЩИМ ЗОНДОВЫМ МИКРОСКОПОМ | 1999 |
|
RU2175761C2 |
| СПОСОБ ПЕРЕМЕЩЕНИЯ ЗОНДА СКАНИРУЮЩЕГО МИКРОСКОПА-НАНОЛИТОГРАФА В ПОЛЕ ГРУБОГО X-Y ПОЗИЦИОНЕРА | 1999 |
|
RU2181212C2 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ НАНОРАЗМЕРНЫХ ОБЪЕКТОВ | 2006 |
|
RU2329945C1 |
| ЗАПОМИНАЮЩЕЕ УСТРОЙСТВО С ЭЛЕКТРИЧЕСКИМ ЗОНДОВЫМ СЧИТЫВАНИЕМ | 2000 |
|
RU2198435C2 |
| БИПОЛЯРНЫЙ ТРАНЗИСТОР | 1998 |
|
RU2166220C2 |
| СПОСОБ ИЗГОТОВЛЕНИЯ КАНТИЛЕВЕРА СКАНИРУЮЩЕГО ЗОНДОВОГО МИКРОСКОПА | 2007 |
|
RU2335033C1 |
| КРЫЛО МАХОЛЕТА И СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КРЫЛА | 1998 |
|
RU2162428C2 |
| КООРДИНАТНЫЙ СТОЛ | 2004 |
|
RU2254640C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ МОДУЛЬ ЗАПОМИНАЮЩЕГО УСТРОЙСТВА СВЕРХВЫСОКОЙ (ТЕРАБИТНОЙ) ЕМКОСТИ | 2002 |
|
RU2242054C2 |
| ГАЗОЧУВСТВИТЕЛЬНЫЙ ДАТЧИК НА ОСНОВЕ ПОЛЕВОГО ТРАНЗИСТОРА И СПОСОБ ОПРЕДЕЛЕНИЯ КОНЦЕНТРАЦИИ ГАЗОВ. | 1998 |
|
RU2169363C2 |

Изобретение относится к электронно-вычислительной технике и предназначено для использования в зондовом запоминающем устройстве большой емкости. Во время считывания цифровой информации в зондовом запоминающем устройстве большой емкости посредством следящей системы в вертикальной плоскости поддерживают постоянный зазор между зондом и поверхностью носителя информации. При этом производят строчное сканирование прямоугольной окрестности текущего элемента привязки, в качестве которого выступает либо вспомогательный синхронизирующий элемент, либо сам элемент памяти. Затем осуществляют программное распознавание в указанной окрестности следующего элемента привязки. Определяют его относительное положение на информационной дорожке и значения бит хранимой информации. Далее описанный выше процесс повторяют относительно указанного следующего элемента, считая его текущим. Технический результат - повышение надежности удержания зонда запоминающего устройства на информационной дорожке при упрощении отдельных элементов конструкции устройства и системы управления. 2 ил.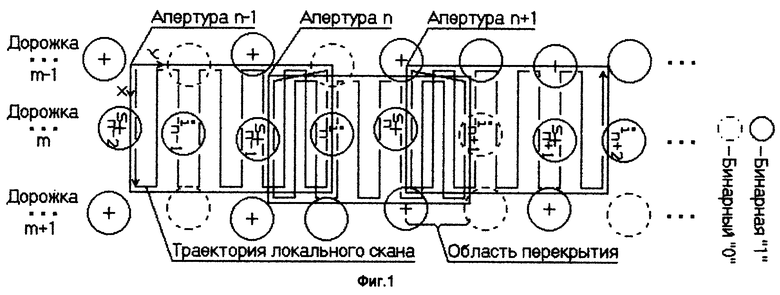
Способ считывания цифровой информации в зондовом запоминающем устройстве большой емкости, в котором посредством следящей системы в вертикальной плоскости поддерживают постоянный зазор между зондом и поверхностью носителя информации, отличающийся тем, что производят строчное сканирование прямоугольной окрестности текущего элемента привязки, в качестве которого выступает либо вспомогательный синхронизирующий элемент, либо сам элемент памяти, распознают в изображении указанной окрестности следующий элемент привязки, определяют его относительное положение на информационной дорожке и значения бит хранимой информации, после чего описанный выше процесс повторяют относительно указанного следующего элемента, считая его текущим.
| B.W | |||
| Chui, H.J | |||
| Mamin, B.D | |||
| Terris, D | |||
| Rugar, T.W | |||
| Kenny "Sidewall-implanted dual-axis piezoresistive cantilever for AFM data storage readback and tracking" IEEE proceedings of the Eventh Annual International Workshop on micro Electro Mechanical Systems, p | |||
| Способ гальванического снятия позолоты с серебряных изделий без заметного изменения их формы | 1923 |
|
SU12A1 |
| US 5654131 A, 05.08.1997 | |||
| 0 |
|
SU322219A1 | |
| УСТРОЙСТВО для холодных ИЗМЕРЕНИЙ ПОЛУПРОВОДНИКОВОГО ПАРАМЕТРИЧЕСКОГО УСИЛИТЕЛЯ | 0 |
|
SU390477A1 |
| US 3646259 A, 29.02.1972 | |||
| US 5255249 A, 19.10.1992 | |||
| СОВМЕСТИМОЕ ОПТИЧЕСКОЕ СКАНИРУЮЩЕЕ УСТРОЙСТВО | 1992 |
|
RU2096836C1 |
| СПОСОБ ОПТИЧЕСКОЙ ЗАПИСИ ИНФОРМАЦИОННОГО СИГНАЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1989 |
|
RU2087950C1 |

