Изобретение относится к авиационной технике и может быть использовано при конструировании микромахолетов.
Одной из важных проблем конструирования крыла махолета является минимизация отрицательной подъемной силы при взмахе крыла вверх.
Известен ряд конструкций крыла махолета, которые по-разному решают эту проблему. В крыле махолета [1] используется система клапанов, вмонтированных в плоскость крыла, которые при движении крыла вверх открываются и пропускают сквозь себя воздух, а при движении крыла вниз закрываются и обеспечивают образование подъемной силы. Недостатком такой конструкции является, во-первых, ее сложность, связанная с большим количеством подвижных деталей и, во-вторых, тот факт, что суммарная площадь клапанов в итоге оказывается сравнительно небольшой и сопротивление воздуха при движении крыла вверх (отрицательная подъемная сила) остается значительным.
Известна конструкция крыла махолета [2], в которой уменьшение отрицательной подъемной силы достигается разворотом плоскости крыла при его движении вверх. Это уменьшение в данной конструкции оказывается достаточно эффективным. Недостатком конструкции является невозможность ее непосредственного использования при изготовлении летающих микрообъектов. Другим недостатком является ее сложность, связанная с тем, что к сложному движению крыла добавляется необходимость поворота вокруг дополнительной оси.
Целью настоящего изобретения является обеспечение возможности изготовления крыла для микромахолетов за счет исполнения конструкции по технологии микроэлектроники, а также упрощение конструкции крыла.
Для достижения поставленной цели предложено крыло махолета, состоящее из несущей плоскости и системы привода, в котором несущая плоскость выполнена в виде закрепленной одним краем мембраны, содержащей токопроводящий слой, а система привода сформирована в виде Т-образных, расположенных вдоль поверхности мембраны консолей, каждая из которых содержит токопроводящий слой длиной 2l, параллельный поверхности мембраны, изолированный от нее в месте крепления консоли к мембране и отделенный от нее зазором d, величина которого лежит в пределах (0,1≅d≅1,0) мкм, а длина консоли определяется соотношением 0,01≅d/l≅0,2), при этом крыло снабжено двумя системами электрических разводок, расположенных на поверхности мембраны и делящих крыло на плечо, примыкающее к закрепленному краю мембраны, и кисть, причем длина плеча составляет (0,1-0,4) от длины всего крыла.
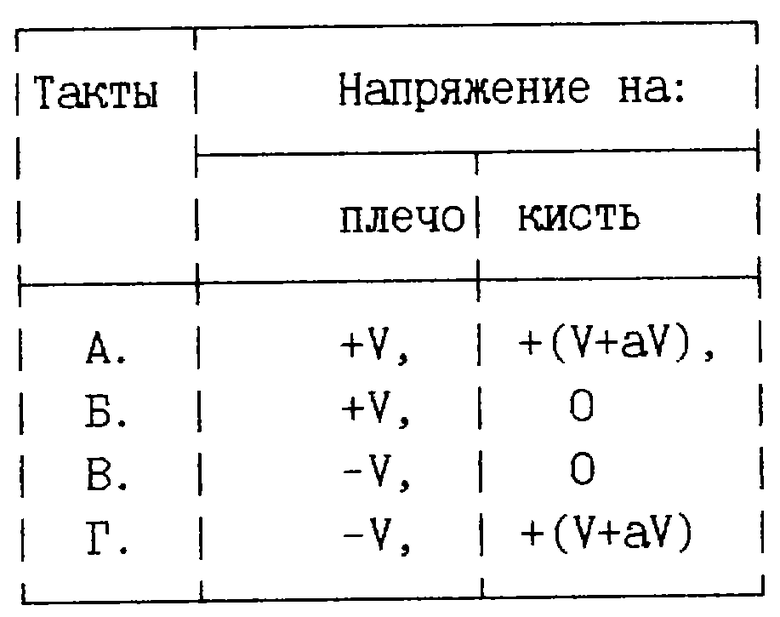
Кроме того, предложен способ управления движением крыла, включающий уменьшение отрицательной подъемной силы при движении крыла вверх, в котором уменьшение указанной силы обеспечивают путем раздельной подачи напряжения на плечо и кисть крыла в определенной последовательности: вначале на плечо и на кисть подают одновременно напряжение +V и +V(a+1) соответственно, затем напряжение с кисти снимают, после чего напряжение на плече меняют на -V и в заключение на кисть подают напряжение +V(a+1), после чего указанную последовательность повторяют многократно, при этом напряжение V лежит в пределах 1-100 В, а "a" не менее 0,1.
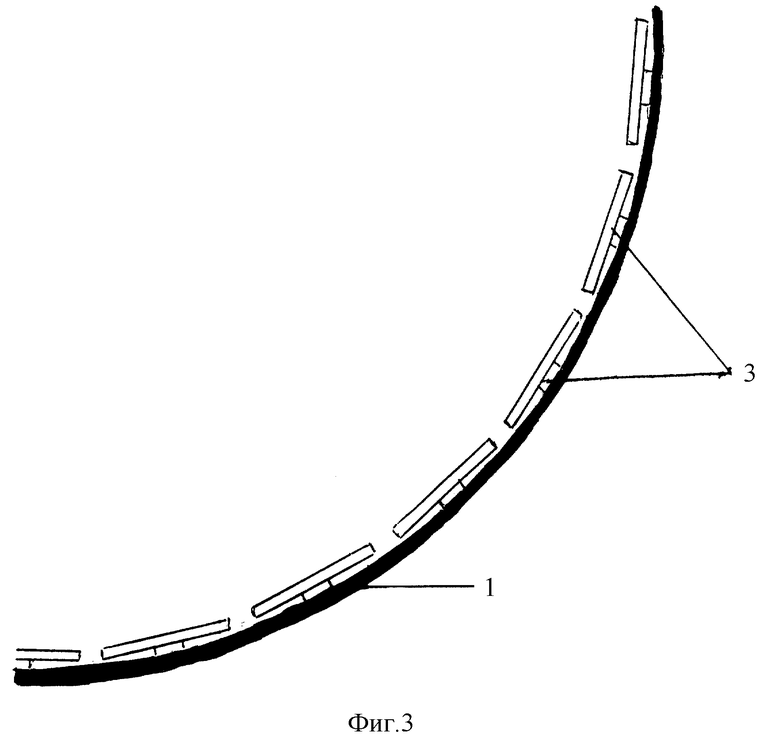
Принцип электростатического изгиба несущей кремниевой мембраны с помощью консолей-сгибателей заключается в следующем. При подаче напряжения на систему несущая мембрана-консоль (данная система имеет вид конденсатора), возникает сила электростатического притяжения между мембраной и консолью. Так как консоль формируется гораздо более жесткой, чем мембрана, то практически стрела прогиба формируется именно на несущей мембране. Если вдоль крыла разместить ряд таких консолей, то стрелы прогиба складываются и возникает управляемый изгиб крыла в целом.
Количество консолей выбирается из соображений целесообразности и может составлять от единиц до нескольких сотен.
Длина каждой консоли 2l выбирается таким образом, чтобы отношение d/l лежало в пределах 0,01 - 0,2. Это отношение указывает на величину локального изгиба крыла вблизи каждой консоли и поэтому оно не может быть более 0,2, так как такой изгиб приводит к сильным механическим напряжениям вплоть до разрушения. С другой стороны, нижний предел указанного диапазона выбран из соображений целесообразности: дальнейшее снижение этого предела приведет к потере эффективности процесса изгиба несущей мембраны.
Столь малая величина зазора выбрана, во-первых, для обеспечения требуемой величины напряженности электрического поля (105-106 В/см) при напряжениях порядка 10 В, а, во-вторых, из технологических соображений - как типичная толщина слоя в технологии микроэлектроники.
При этом применяется новый способ управления движением крыла, который заключается в том, что путем раздельной подачи напряжения крыло разделяется на две части: одна часть - ближняя к корпусу (плечо) на которое подается напряжение ±V, где V лежит в пределах 1-100 В, вторая часть - дальняя от корпуса (кисть), на которую подается напряжение +(V+aV), где a≥0,1. Причем последовательность подачи этих напряжений представлена в таблице.
Напряжения на плечо и кисть, соответствующие одному такту, подаются одновременно. Данный цикл повторяется многократно в течение всего времени работы крыла.
Выбор указанного диапазона напряжений на плечевую часть продиктован следующими соображениями: напряжения более 100 В могут вызвать пробой, а менее 1 В подавать нецелесообразно из-за низкой эффективности работы.
Выбор диапазона напряжений на кистевую часть, то есть величины "a" обусловлен тем, что эти напряжения должны превышать величину V не менее чем на 10%, то есть a ≥ 0,1, чтобы обеспечить начало процесса закручиваания кистевой части, в то время как плечевая часть только изгибается. Верхний предел для величины "a" в каждом конкретном случае может быть свой и в принципе не ограничивается.
Частота подачи напряжения (другими словами - частота взмахов крыла) может составлять величины от единиц до тысяч герц.
Граница между плечевой и кистевой частью устанавливается на расстоянии (0,1-0,4)L от основания крыла, где L - длина крыла. Смещение этой границы ближе, чем 0,1L нецелесообразно, так как укорачивание плеча вызывает необходимость соответственного увеличения силы. Смещение этой границы дальше, чем 0,4L приводит к увеличению отрицательной подъемной силы.
При выполнении указанных требований поставленная цель будет достигнута.
На фиг. 1 представлена схема четырехтактного движения махового крыла.
На фиг. 2 представлена схема единичной консоли-сгибателя.
На фиг. 3 представлена иллюстрация принципа управляемого электростатического изгиба несущей кремниевой мембраны с помощью консолей-сгибателей.
На чертежах приняты следующие обозначения:
Фиг. 1
А - подъем крыла. Б - выпрямление крыла. В - опускание крыла, Г - скручивание крыла. Точка О - сопряжение плечевой и кистевой частей.
Фиг. 2
1. Мембрана-носитель (нижняя обкладка конденсатора).
2. Изолятор.
3. Консоль (верхняя обкладка конденсатора).
λ - Стрела прогиба.
Пример изготовления крыла махолета.
На поверхности кремниевой пластины (см. фиг. 2) формируется слой поликристаллического кремния толщиной 0,5-1 мкм, который впоследствии станет несущей мембраной 1 крыла. На этом слое формируется жертвенный слой из двуокиси кремния толщиной 0,5 мкм, в котором вытравливаются окна для изолирующих подставок 2 для консолей и все покрывается слоем нитрида кремния толщиной 0,1 мкм. Затем наносится второй слой поликристаллического кремния толщиной 0,5-1 мкм, в котором формируется рисунок системы Т-образных консолей 3 и разводки. Общее количество консолей-сгибателей, размещенных по плоскости крыла в несколько рядов, в нашем случае составляет более 1000 шт. Следующий блок операций включает в себя вскрытие обратной стороны и травление кремния снизу вплоть до несущей плоскости крыла. На завершающей стадии проводится удаление защитных диэлектрических покрытий и удаление жертвенного слоя двуокиси кремния. Следует отметить, что все технологические операции проводятся стандартными методами микроэлектроники и специальной разработки новых технологических операций не требуется.
Устройство работает следующим образом.
Изгиб крыла осуществляется электростатическими силами путем подачи напряжения на указанные токопроводящие слои мембраны и системы консолей. Величина этой силы F в расчете на каждую консоль будет равна
F = V2Sεo/2d2
где V - напряжение на консоли;
d - величина зазора;
S - площадь консоли;
εo - диэлектрическая постоянная.
Полагая, что V = 1 В, S = 6·1010 м2, d = 10-6 м, εo= 3×109/4π, получим оценку для величины этой силы: F ≈ 0,5·10-8 Н.
Изгиб λ мембраны под действием этой силы оценивается по формуле
λ = 3F1/2Eh3b
где l - половина длины консоли;
b - ширина консоли;
E - модуль Юнга;
h - толщина мембраны.
С учетом того, что l = 30 мкм, b = 20 мкм, E ≈ 100 ГПа, h = 1 мкм получим величину изгиба 1 мкм.
То есть при подаче на консоль, расположенную на плече крыла и выполненную по указанным параметрам, напряжения в 1В мы получаем локальный изгиб мембраны на величину 1 мкм, что при длине консоли 30 мкм соответствует изгибу на угол 1/30 рад. Суммарный угол поворота для расположенных в одном ряду 30 консолей, которые находятся на плече, составит 1 рад.
На кистевой части количество консолей более чем вдвое превышает количество консолей на плече и составляет, в одном ряду, более 60 шт. Кроме того, напряжение на эти консоли составляет, как указано выше, более чем 1,1 от напряжения на плече. В нашем случае это 1,5В. С учетом этого, а также с учетом квадратичной зависимости силы от напряжения, получим суммарный угол изгиба кисти более 4,5 рад, что уже соответствует не простому изгибу, а закручиванию мембраны.
Эти оценки показывают, что небольшими изменениями в выборе подаваемого напряжения легко обеспечить такое функционирование крыла, чтобы плечевая часть для создания махового усилия могла изгибаться в пределах ±π/2, а кистевая часть, которая перед махом крыла вверх скручивается, а перед махом крыла вниз распрямляется, имела диапазон изгиба более чем 0-π.
Такое функционирование крыла обеспечит возможность изготовления летающих микрообъектов, которые найдут применение в авиации, военном деле, народном хозяйстве и т.д.
Источники информации.
1. Патент РФ N 2043950 от 01.06.92, кл. B 64 C 33/00.
2. Авт. св. СССР N 1818274 от 16.08.90, кл. B 64 C 33/00.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ РЕЛЬЕФА ПОВЕРХНОСТИ СКАНИРУЮЩИМ ЗОНДОВЫМ МИКРОСКОПОМ | 1999 |
|
RU2175761C2 |
| СПОСОБ ПЕРЕМЕЩЕНИЯ ЗОНДА СКАНИРУЮЩЕГО МИКРОСКОПА-НАНОЛИТОГРАФА В ПОЛЕ ГРУБОГО X-Y ПОЗИЦИОНЕРА | 1999 |
|
RU2181212C2 |
| СПОСОБ СЧИТЫВАНИЯ ЦИФРОВОЙ ИНФОРМАЦИИ В ЗОНДОВОМ ЗАПОМИНАЮЩЕМ УСТРОЙСТВЕ | 1998 |
|
RU2181218C2 |
| БИПОЛЯРНЫЙ ТРАНЗИСТОР | 1998 |
|
RU2166220C2 |
| ГАЗОЧУВСТВИТЕЛЬНЫЙ ДАТЧИК НА ОСНОВЕ ПОЛЕВОГО ТРАНЗИСТОРА И СПОСОБ ОПРЕДЕЛЕНИЯ КОНЦЕНТРАЦИИ ГАЗОВ. | 1998 |
|
RU2169363C2 |
| ЭЛЕКТРОЛЮМИНЕСЦЕНТНОЕ УСТРОЙСТВО НА ОСНОВЕ ПОЛИМЕРНЫХ МАТЕРИАЛОВ | 2000 |
|
RU2177658C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ КАНТИЛЕВЕРА СКАНИРУЮЩЕГО ЗОНДОВОГО МИКРОСКОПА | 2007 |
|
RU2335033C1 |
| ЭМИТТЕР ДЛЯ ИНТЕГРАЛЬНЫХ ПРИБОРОВ | 2003 |
|
RU2250526C1 |
| УСИЛИТЕЛЬ ЭЛЕКТРОННОГО ПОТОКА | 2000 |
|
RU2222072C2 |
| КООРДИНАТНЫЙ СТОЛ | 2004 |
|
RU2254640C1 |

Изобретение относится к авиационной технике и может быть использовано при конструировании микромахолетов. Предложено крыло махолета, содержащее плечо, кисть и привод управления движением. Плечо и кисть образуют несущую плоскость, которая выполнена в виде закрепленной одним краем мембраны, имеющей токопроводящий слой. Привод сформирован в виде Т-образных, расположенных вдоль поверхности мембраны консолей, каждая из которых содержит токопроводящий слой длиной 2l, параллельный поверхности мембраны, изолированный от нее в месте крепления консоли к мембране и отделенный от нее зазором d, величина которого лежит в пределах 0,1 ≅ d ≅ 1,0 мкм. Длина консоли определяется соотношением 0,01 ≅ d/l ≅ 0,2. Крыло снабжено двумя системами электрических разводок, расположенных на поверхности мембраны и разделяющих крыло на плечо, примыкающее к закрепленному краю мембраны, и кисть так, что длина плеча составляет 0,1 - 0,4 от длины всего крыла. Предложен также способ управления движением крыла, включающий уменьшение отрицательной подъемной силы при движении крыла вверх, в котором уменьшение указанной силы обеспечивают путем раздельной подачи напряжения на плечо и кисть крыла. Изобретение направлено на упрощение конструкции крыла для микромахолета. 2 с.п. ф-лы, 3 ил., 1 табл.
| МАШУЩИЙ ДВИЖИТЕЛЬ | 1993 |
|
RU2089461C1 |
| СПОСОБ ПЕРЕДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ В ВОЗДУШНОЙ СРЕДЕ | 1994 |
|
RU2094319C1 |
| Модель летательного аппарата | 1990 |
|
SU1818274A1 |
| US 4749149 A, 07.06.1988 | |||
| DE 3806138 A1 07.09.1989. | |||

