Изобретение относится к прецизионной измерительной технике и нанотехнологии, оно предназначено для использования в сканирующем зондовом микроскопе (СЗМ), а также в выполненных на базе СЗМ нанолитографе и зондовом запоминающем устройстве большой емкости.
В существующих СЗМ грубый X-Y позиционер [1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12], обеспечивая в пределах собственного максимального поля (область на поверхности, доступная для исследования после установки образца) исходное размещение точного, выполняет перемещение с некоторым достаточно крупным шагом, по величине обычно не превышающим рабочего диапазона точного. Направление, величина, скорость и шаг перемещения грубого позиционера задаются оператором вручную.
Из-за ошибок, связанных в первую очередь с неравномерностью шага грубого позиционера, действием гистерезиса, термодрейфа, крипа и кауплинга, а также с субъективным фактором, привнесенным установками оператора, невозможно точно переместиться из одной точки доступного поля на поверхности образца в любую другую, лежащую вне текущего диапазона точного сканера (здесь предполагается, что точный сканер способен выполнять линейные перемещения с высокой точностью и практически не чувствителен к дрейфу и крипу, см. [13, 14, 15] ). Таким образом, в большинстве имеющихся на сегодняшний день инструментов нельзя точно определить взаимное положение сканов, выполненных точным позиционером микроскопа в разных местах поля грубого и, следовательно, правильно составить из них целое изображение.
Необходимость в таком способе позиционирования зонда, где бы указанные выше недостатки были бы устранены, возникает в нанолитографии с характерными размерами элементов от нескольких десятков нанометров до нескольких ангстрем. В рассматриваемой технологии в качестве объектов манипуляции выступают атомные кластеры, отдельные молекулы [16] и атомы [17].
Другим перспективным применением способа может стать СЗМ-контроль топологических размеров более крупных элементов наноэлектроники, таких как транзистор с высокой подвижностью электронов, биполярный транзистор с гетеропереходом, лазеры на гетероструктурах и др. устройства [18]. Заявляемый способ можно использовать в зондовом запоминающем устройстве большой емкости [19] для точного перемещения зонда чтения/записи по большой площади поверхности носителя информации.
В настоящее время для исследования и проведения технологических процессов доступны поверхности площадью в сотни квадратных миллиметров, где возможны атомарно-гладкие участки микронных размеров. Поэтому для получения больших интеграций элементов на одной подложке необходимо уметь точно перемещать зонд в пределах поля грубого позиционера, правильно связывать отдельные сканы, выполненные в разных местах доступной поверхности, иметь возможность многократного возвращения в любое место на поверхности для выполнения следующей технологической операции.
Для решения указанных проблем грубый позиционер требуется снабдить линейными Х-, Y-датчиками положения и образовать замкнутую следящую систему наподобие измерительной системы точного позиционера [13-15]. Основное отличие этих систем будет состоять в типе используемых датчиков. Датчики точного позиционера обладают высокой чувствительностью и малым диапазоном, датчики грубого позиционера напротив имеют невысокое разрешение, но зато большой диапазон измеряемых перемещений. Как правило, датчики грубого позиционера строятся на базе интерферометра, способного работать в долях полосы.
На практике использование двух следящих систем: одной для грубого позиционера, другой для точного приводит к резкому удорожанию оборудования, а также к другим проблемам (калибровка, юстировка, паразитное взаимовлияние). Поэтому, жертвуя разрешением, строят систему, в которой один и тот же интерференционный датчик обслуживает как точный, так и грубый позиционеры. Примером данного подхода может служить широкопольный микроскоп [1], который выбран в качестве прототипа изобретения.
Необходимо отметить, что данный микроскоп является уникальным, очень дорогим измерительным инструментом, позволяющим производить позиционирование зонда на длине 50 мм с погрешностью 1 нм. Для обеспечения высоких точностных характеристик элементы прибора смонтированы в корпусе, изготовленном из Зеродура (Zerodur) - материала с малым коэффициентом α теплового расширения (α = 0.05•10-6K-1). Микроскоп помещен внутрь охватывающих друг друга оболочек, выполняющих функции: пассивной виброизоляции, акустической изоляции, вакуумной камеры (остаточное давление 10-7 Па), активной виброизоляции, камеры термостабилизации (точность поддержания температуры 1 мК).
Измерительная часть прибора представляет собой метрологический короб из Зеродура с укрепленным в нем образцом. В корпус встроены зеркала дифференциальных интерферометров. Относительно образца по направляющим движутся Х-, Y-каретки, на которых смонтирован трубчатый манипулятор с зондом и остальные части интерферометров: лазеры, зеркала, призмы и приемники излучения. Каретки приводятся в движение шаговыми двигателями.
Недостатками используемого в прототипе способа позиционирования являются:
1. Высокая стоимость и сложность изготовления метрологического короба (жесткие требования к прямолинейности и ортогональности, а также к используемым материалам).
2. Дорогой и сложный в изготовлении грубый позиционер (направляющие, каретки, шаговый двигатель).
3. Большие затраты и технические сложности в обеспечении термо- и виброизоляции.
4. Недостаточно высокое для СЗМ предельное разрешение прибора (в сильной степени ограничено вибрациями по причине низкочастотных механических резонансов грубого позиционера, а также шумами интерферометрических датчиков).
5. Высокая стоимость и сложность интерференционных датчиков, большая трудоемкость юстировки оптической системы.
Таким образом, на сегодняшний день не создано достаточно простых и доступных систем, способных осуществлять точные перемещения зонда на большом поле грубого позиционера. Предлагаемый способ позволяет устранить указанные недостатки посредством выполнения "привязки" зонда микроскопа к особенности поверхности и совместного передвижения точного и грубого X-Y позиционеров.
На чертеже в качестве примера представлена последовательность действий (поз. 2-6), обеспечивающая прецизионное перемещение зонда микроскопа из точки А доступного поля в точку D на расстояние более одного диапазона точного позиционера. Обозначения: ТП - точный позиционер, ГП - грубый позиционер. Пунктиром на поверхности образца показано разбиение поля грубого позиционера на смежные диапазоны точного. Дужки в положениях зонда В и С символизируют особенности поверхности.
Далее ради определенности положим, что исследуемый образец закреплен на точном позиционере, а зонд микроскопа - на грубом. Для простоты рассмотрим одномерный случай (см. чертеж): пусть требуется переместить зонд из точки А в точку D.
Чтобы способ, предлагаемый в данной заявке, применить в системах наподобие [13-15], программу управления микроскопом следует дополнить так называемой процедурой привязки. Основная функция данной процедуры состоит в том, чтобы, постоянно компенсируя негативное влияние возмущающих факторов, удерживать зонд микроскопа над выбранным местом поверхности. Обычно таким местом является какая-нибудь локальная особенность типа "холм" или "яма". Поскольку в данном способе производится распознавание [20] сосканированного изображения, то особенности рельефа следует понимать в широком смысле. Физически, в зависимости от используемой разновидности зондового микроскопа, они могут представлять собой области намагниченности, места локализации электрического заряда и т. п.
Привязка зонда осуществляется путем сканирования точным позиционером небольшой окрестности (сегмента) выбранной особенности, распознавания данной особенности в полученном изображении, определении координат ее положения и перемещения зонда посредством того же точного позиционера в место с найденными координатами. Как легко видеть, процедура привязки является по сути цифровой следящей системой, реализованной программно.
Между тем, возможно и аппаратное решение, например, такое, что было предложено в работе [21] . Авторы, возбуждая круговое движение зонда в горизонтальной плоскости, снабдили микроскоп специальной схемой, которая по изменению туннельного тока вырабатывала управляющие напряжения для точного позиционера так, что зонд самостоятельно "находил" и "прикреплялся" к локальному экстремуму поверхности.
Преимущество программной привязки состоит в возможности применить сложные алгоритмы обработки, а также использовать в качестве особенностей отдельные молекулы и атомы, что сделать в системе [21] трудно из-за шумов и ограничений по разрешению (радиус круга развертки должен быть мал по сравнению с размерами используемых особенностей). В целом, для правильного позиционирования не принципиально то, как фактически производится привязка, важно только, чтобы зонд микроскопа был надежно "прикреплен" к некоторому месту поверхности во время выполнения перемещения грубым позиционером.
Итак, в исходном состоянии (поз. 1) зонд микроскопа расположен в точке А поверхности. Посредством точного позиционера будем двигать его относительно поверхности в направлении точки D до тех пор, пока не "упремся" в край диапазона (см. поз. 2 точка В). Затем производим поиск и захват особенности, ближайшей к точке В. Далее в направлении точки D делает шаг грубый позиционер (поз. 3). Одновременно с этим движением происходит непрерывное циклическое выполнение процедуры привязки, которая посредством точного позиционера стремится компенсировать возникшее рассогласование.
Далее перемещение грубого позиционера, а вместе с ним и точного, продолжается до момента исчерпания диапазона точного позиционера. Таким образом, совместное передвижение позиционеров возвращает точному позиционеру возможность дальнейшего перемещения зонда вправо (относительно поверхности). После этого следует повторение выше перечисленных действий (см. поз. 4, 5), в результате которых зонд перемещается вправо по поверхности на один диапазон точного позиционера и достигает точки С. Наконец посредством точного позиционера (поз. 6) зонд перемещается в заданную точку D.
Таким образом, всякий раз, когда зонд СЗМ достигает края диапазона точного позиционера, в работу вступает грубый позиционер. Его задача - переместить поле сканирования точного позиционера в новое место на поверхности образца. Причем, при выполнении шага грубым позиционером нельзя допустить потери зондом текущей особенности (смещение грубого позиционера является для процедуры привязки возмущающим воздействием), поскольку в противном случае две смежные области на образце не могут быть корректно связаны. Правильный выбор размера сегмента, величины шага и скорости перемещения грубого позиционера исключает вероятность того, что в очередном цикле привязки зонд захватит вместо текущей особенности одну из ее соседей.
Величина шага грубого позиционера должна определяться размерами захваченной особенности, минимальным расстоянием до ближайших особенностей, расположенных по направлению перемещения, а также скоростью дрейфа головки микроскопа. Скорость перемещения грубого позиционера должна быть ограничена настолько, чтобы процедура привязки успевала обнаруживать и компенсировать возникающие рассогласования. После выполнения шага грубым позиционером необходимо дождаться окончания переходного процесса, моменту завершения которого соответствует установление величины рассогласования, сравнимой с величиной естественного дрейфа прибора.
Поскольку направление движения и средний шаг грубого позиционера известны заранее, то "связку" позиционеров можно двигать с большей скоростью, если перемещать точный позиционер синхронно и с тем же шагом, что и грубый. После каждого шага следует выполнить последовательность привязок, уточняющую положение зонда относительно "центра тяжести" особенности. Отметим, что среднеквадратическая погрешность перемещения грубого позиционера определяет минимальную по размеру особенность, которую можно использовать для привязки зонда.
Среди известных конструкций грубых позиционеров следует выделить три типа устройств: "шагающие" (walker, louse) [2-5], "ползущие" (inchworm) [5-7] и инерционные [8-10], главным преимуществом которых является принципиально неограниченный диапазон перемещений. Анализ показывает, что из этих трех типов наиболее подходящими для использования в описываемом способе следует считать шагающие позиционеры. Ползущие позиционеры имеют приблизительно те же характеристики, но, будучи изначально одномерными устройствами, оказываются более громоздкими при создании двухмерных X-Y конструкций. Грубые позиционеры инерционного типа, как правило, имеют невысокое разрешение, развивают большие ускорения, менее удобны, так как из-за большей чувствительности к качеству и чистоте трущихся поверхностей обладают существенно более неравномерным, плохо регулируемым шагом; незначительный наклон позиционера может нарушить нормальную работу устройства. Как и ползущие, инерционные позиционеры часто способны перемещаться только в одном направлении.
Любому типу грубого позиционера в той или иной мере свойственны погрешности и нелинейности перемещения, обычно их абсолютные величины на порядки превосходят аналогичные параметры точных позиционеров. Особенность предлагаемого способа заключается в том, что на результаты размещения поля точного позиционера в поле грубого погрешности и нелинейности последнего не влияют.
В процессе движения связки из-за непараллельности латеральной плоскости грубого шагающего позиционера плоскости точного, Z-составляющих термодрейфа и крипа, паразитных связей типа X-->Z, Y-->Z обоих позиционеров, а также нестабильностей в вертикальной плоскости грубого позиционера происходит изменение координаты Z зонда. Нестабильности в вертикальной плоскости, а также нежелательное вращение в плоскости образца могут возникать в моменты электростатической фиксации или освобождения опор. Причина заключается в микронеровностях и загрязненьях, приводящих к проскальзыванию.
Изменение вертикальной координаты может быть измерено, а затем скорректировано введением поправки. Вращение в плоскости образца приводит к неправильному взаимному положению связанных областей только в микроскопах, где сканирование производится иглой. В этом случае процедура привязки вместо сегмента должна выполнять сканирование апертуры - области, охватывающей ближайших соседей особенности, для того, чтобы по изменению положений соседних особенностей в последовательности циклов привязок суметь выявить угол поворота. Если угол поворота известен, то не составляет большого труда собрать из отдельных областей целое изображение путем поворота скана вокруг соответствующей особенности, игравшей роль привязки в процессе перемещения.
Таким образом, описанный способ позволяет решить актуальную на сегодняшний день проблему нанометрологии [1] - измерение рельефа поверхности на большой площади с высокой степенью точности и линейности.
В приведенных рассуждениях предполагалось, что скорость дрейфа (термосоставляющая + крип) много меньше скорости движения грубого манипулятора и что за характерное время регулирования в цикле привязки дрейф не вызывает существенного смещения особенности. Однако при работе с предельными особенностями поверхности - атомами дрейф становится значительно более заметным и поэтому должен быть учтен при выборе размера сегмента и шага грубого позиционера.
При поиске распределенных по полю сканера калибровочных коэффициентов важно, чтобы структура эталона в каждой точке поля сканера была неизменной, что на практике не всегда осуществимо из-за дефектов. Предложенный способ совместного перемещения позиционеров позволяет предварительно выбранный "правильный" участок поверхности эталона двигать по полю точного сканера. Таким образом, возможна калибровка всего поля сканера небольшой областью эталона.
Данный способ совместного перемещения по причине отсутствия на имеющемся микроскопе Solver P4 производства фирмы НТ-МДТ грубого X-Y позиционера был опробован лишь частично. Посредством точного трубчатого позиционера выполнялась натурная симуляция движения грубого. В результате проведенных опытов полностью подтвердилась способность процедуры привязки в реальном масштабе времени компенсировать смещения зонда.
В качестве особенностей выступали атомы на поверхности высокоориентированного пиролитического графита. Было показано, что удержание зонда реализуемо при величине шага грубого позиционера 1 и скорости перемещения не более 1
и скорости перемещения не более 1 на фоне дрейфа не сильнее чем 0.1
на фоне дрейфа не сильнее чем 0.1 Поскольку удержание оказалось возможным на отдельных атомах, то нет сомнения в том, что оно будет осуществимо на любых других "крупных" объектах.
Поскольку удержание оказалось возможным на отдельных атомах, то нет сомнения в том, что оно будет осуществимо на любых других "крупных" объектах.
Определенные трудности при использовании шагающего грубого позиционера в процессе перемещения по атомарно-гладкой поверхности могут возникнуть в моменты фиксации и отпускания опор. Здесь влияние нежелательных случайных подвижек может быть сведено на нет, если напряжение на электростатические зажимы подавать не скачком, а плавно, так чтобы следящие системы успевали компенсировать возникающие рассогласования.
Источники информации
[1] Е. С. Teague, The National Institute of Standards and Technology molecular measuring machine project: Metrology and precision engineering design, J. Vac. Sci. Technol. B, vol. 7, 6, p.1898, 1989.
[2] G. Binnig, H. Nievergelt, H. Rohrer, E. Weibel, Piezo-electric travelling support, International Business Machines Corporation, U. S. Patent 4422002, December 20, 1983.
[3] S. Gregory, С. Т. Rogers, High speed scanning tunneling microscope, Bell Communications Research, Inc., U. S. Patent 4814622, March 21, 1989.
[4] H. J. Mamin, D. W. Abraham, E. Ganz, J. Clarke, Two-dimensional, remote micropositioner for a scanning tunneling microscope, Rev. Sci. Instrum., vol. 56, 11, p. 2168, 1985.
[5] К. Takata, S. Hosoki, S. Hosaka, T. Tajima, Scanning tunneling microscope with reliable coarse positioners, Rev. Sci. Instrum., vol. 60, 4, p. 789, 1989.
[6] J. G. H. Hermsen, H. van Kempen, В. J. Nelissen, L. L. Soethout, G. F. A. Van de Walle, P. J. W. Weijs, P. Wyder, New mechanical constructions for the scanning tunneling microscope, Surf. Sci., vol. 181, p. 183, 1987.
[7] Т. Kato, F. Osaka, I. Tanaka, S. Ohkouchi, A scanning tunneling microscope using dual-axes inchworms for the observation of a cleaved semiconductor surface, J. Vac. Sci. Technol. B, vol. 9, 4, p. 1981, 1991.
[8] К. Besocke, An easily operable scanning tunneling microscope, Surf. Sci., vol.181, p.145,1987.
[9] D. W. Pohl, Sawtooth nanometer slider: a versatile low voltage piezoelectric translation device, Surf. Sci., vol. 181, p. 174, 1987.
[10] S. С. Meepagala, F. Real, C. B. Reyes, A. Novoselskaya, Z. Rong, E. L. Wolf, Compact scanning tunneling microscope with easy-to-construct X-Z inertial sample translation, J. Vac. Sci. Technol. A, vol. 8, 4, p. 3555, 1990.
[11] J. Fu, R. D. Young, T. V. Vorburger, Long-range scanning for scanning tunneling microscopy, Rev. Sci. Instrum., vol. 63, 4, p. 2200, 1992.
[12] V. B. Elings, System for scanning large sample areas with a scanning probe microscope, Digital Instruments, Inc., U. S. Patent 4999494, March 12, 1991.
[13] H. Zhang, F. Huang, T. Higuchi, Dual unit scanning tunneling microscope-atomic force microscope for length measurement based on reference scales, J. Vac. Sci. Technol. B, vol. 15, 4, p. 780, 1997.
[14] R. С. Barrett, C. F. Quate, Optical scan-correction system applied to atomic force microscopy, Rev. Sci. Instrum., vol. 62, 6, p. 1393, 1991.
[15] J. E. Griffith, G. L. Miller, C. A. Green, D. A. Grigg, P. E. Russell, A scanning tunneling microscope with a capacitance-based position monitor, J. Vac. Sci. Technol. B, vol. 8, 6, р.2023, 1990.
[16] T. A. Jung, R. R. Schlittler, J. K. Gimzewski, H. Tang, C.Joachim, Controlled room-temperature positioning of individual molecules: Molecular flexure and motion, Science, vol.271, 5246, p. 181, 1996.
[17] J. A. Stroscio, D. M. Eigler, Atomic and molecular manipulation with the scanning tunneling microscope, Science, vol. 254, p. 1319, 1991.
D. M. Eigler, E. K. Schweizer, Positioning single atoms with a scanning tunneling microscope, Nature, vol. 344, 6266, p. 524, 1990.
H. J. Mamin, P. H. Guethner, D. Rugar, Atomic emission from a gold scanning-tunneling-microscope tip, Phys. Rev. Lett. , vol. 65, 19, 2418, 1990.
[18] M. Sundaram, S. A. Chalmers, P. F. Hopkins, A. C. Gossard, New quantum structures, Science, vol. 254, p. 1326, 1991.
[19] H. J. Mamin, В. D. Terris, L. S. Fan, S. Hoen, R. C. Barrett and D. Rugar, High-density data storage using proximal probe techniques, IBM J. Res. Develop, vol. 39, 6, p. 681, 1995.
[20] R. V. Lapshin, Automatic lateral calibration of tunneling microscope scanners, Rev. Sci. Instrum., vol. 69, 9, p. 3268, 1998.
[21] D. W. Pohl, R. Moller, "Tracking" tunneling microscopy, Rev. Sci. Instrum., vol. 59, 6, р.840, 1988.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ РЕЛЬЕФА ПОВЕРХНОСТИ СКАНИРУЮЩИМ ЗОНДОВЫМ МИКРОСКОПОМ | 1999 |
|
RU2175761C2 |
| СПОСОБ СЧИТЫВАНИЯ ЦИФРОВОЙ ИНФОРМАЦИИ В ЗОНДОВОМ ЗАПОМИНАЮЩЕМ УСТРОЙСТВЕ | 1998 |
|
RU2181218C2 |
| КООРДИНАТНЫЙ СТОЛ | 2004 |
|
RU2254640C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ РАСПРЕДЕЛЕННОЙ КАЛИБРОВКИ СКАНЕРА ЗОНДОВОГО МИКРОСКОПА | 2005 |
|
RU2295783C2 |
| ШАГАЮЩИЙ РОБОТ-НАНОПОЗИЦИОНЕР И СПОСОБ УПРАВЛЕНИЯ ЕГО ПЕРЕДВИЖЕНИЕМ | 2010 |
|
RU2540283C2 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП С ЭКВИВАЛЕНТОМ СКАНЕРА | 2003 |
|
RU2249264C1 |
| ПОЗИЦИОНЕР ТРЕХКООРДИНАТНЫЙ | 2005 |
|
RU2297078C1 |
| УСТРОЙСТВО НАГРЕВА ДЛЯ СКАНИРУЮЩИХ ЗОНДОВЫХ МИКРОСКОПОВ | 2001 |
|
RU2218562C2 |
| КРЫЛО МАХОЛЕТА И СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КРЫЛА | 1998 |
|
RU2162428C2 |
| БИПОЛЯРНЫЙ ТРАНЗИСТОР | 1998 |
|
RU2166220C2 |
Изобретение относится к прецизионной измерительной технике и нанотехнологии и предназначено для использования в сканирующем зондовом микроскопе, в зондовом нанолитографе, зондовом запоминающем устройстве большой емкости. Техническим результатом изобретения является повышение точности и линейности позиционирования зонда на большой площади поверхности образца. Вначале движение выполняется посредством точного позиционера до момента достижения им границы своего диапазона. Затем производится поиск и привязка зонда к ближайшей особенности поверхности. После этого грубый позиционер выполняет перемещение в таком направлении, чтобы следующий за ним точный позиционер перемещался к противоположной границе своего диапазона. После достижения этой границы описанная выше последовательность действий повторяется циклически до момента прихода зонда в точку на поверхности, отстоящую от исходной на заданное расстояние. 1 ил.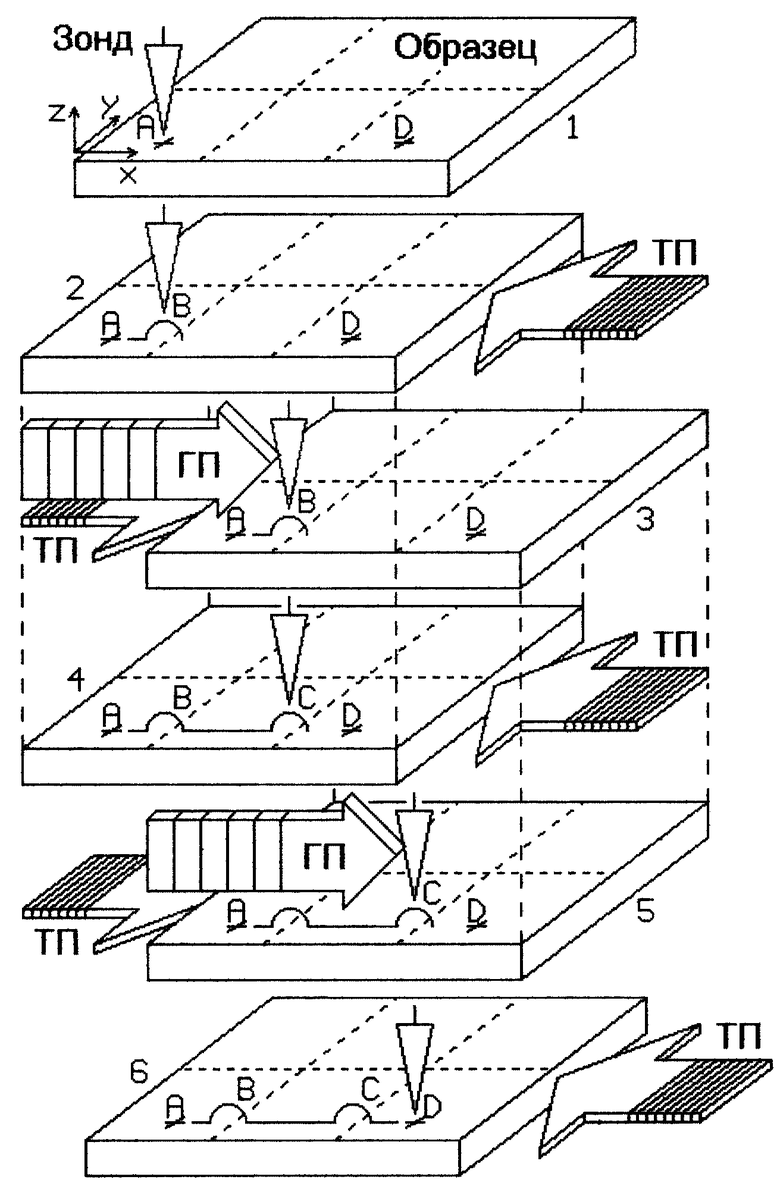
Способ перемещения зонда сканирующего микроскопа-нанолитографа в поле грубого Х-Y позиционера, основанный на применении грубого позиционера и точного, способного обеспечить линейное перемещение, отличающийся тем, что в момент достижения границы диапазона точного позиционера посредством точного позиционера производят поиск и захват ближайшей особенности поверхности, затем выполняют совместное передвижение грубого и точного позиционеров таким образом, чтобы точный позиционер перемещался к противоположной границе своего диапазона при одновременном выполнении процедуры привязки, удерживающей зонд над выбранной особенностью поверхности, после достижения противоположной границы диапазона точным позиционером описанную последовательность действий повторяют циклически до момента прихода зонда в точку на поверхности, отстоящую от исходной на заданное расстояние.
| Лесопосадочная машина | 1973 |
|
SU740179A1 |
| ЕР 215162 А1, 25.03.1987 | |||
| СПОСОБ ВИЗУАЛИЗАЦИИ МИКРОКОНТРАСТНЫХ ОБЪЕКТОВ И ОПТИЧЕСКИЙ ПОЛЯРИЗАЦИОННЫЙ НАНОСКОП ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2029976C1 |
| RU 95108587 А1, 20.08.1996. | |||

