Изобретение относится к подъемно-транспортному машиностроению, в частности к устройствам для монтажа грузов с помощью летательного аппарата, например вертолета.
Известно устройство для монтажа грузов летательным аппаратом, содержащее подсоединенную к летательному аппарату раму, на которой смонтировано поворотное кольцо с приводом, и грузовые канаты, подсоединенные к летательному аппарату и связанные с кольцом (авт. свид. СССР N 497197, кл. B 64 D 9/00, B 64 B 1/00, 1974). Поворотом кольца обеспечивают наведение груза на проектные отметки в пределах размеров проекции рамы на землю. Однако такое исполнение устройства не обеспечивает поворот груза вокруг вертикальной оси, т.е. его азимутальное ориентирование при монтаже.
Задачей настоящего изобретения является достижение технического результата, заключающегося в обеспечении поворота груза вокруг вертикальной оси, т. е. по азимуту. Кроме того, в предлагаемом техническом решении обеспечено исключение передачи нерасчетных нагрузок и моментов от груза к летательному аппарату, что может привести к повышению безопасности полетов.
Достижение указанного технического результата обеспечивается тем, что в устройство для монтажа груза летательным аппаратом, содержащее подсоединенную к летательному аппарату раму, на которой смонтировано поворотное вокруг своей оси кольцо с приводом, и грузовые канаты, согласно изобретению, дополнительно введена траверса, соединенная с замком летательного аппарата посредством сходящихся у замка связей, при этом на внутренней поверхности кольца выполнены диаметрально противоположные пазы, в которых размещены с возможностью передачи крутящего момента или выхода из них концы траверсы, к которым подсоединены грузовые канаты, причем на раме снаружи кольца установлены шкивы, сопряженные с внутренней поверхностью огибающих их гибких замкнутых элементов, которые противоположной поверхностью взаимодействуют с наружной поверхностью кольца с возможностью передачи крутящего момента и пробуксовывания при перегрузке, причем один или несколько шкивов связаны с приводом. На раме могут быть установлены натяжные ролики для взаимодействия с гибкими элементами.
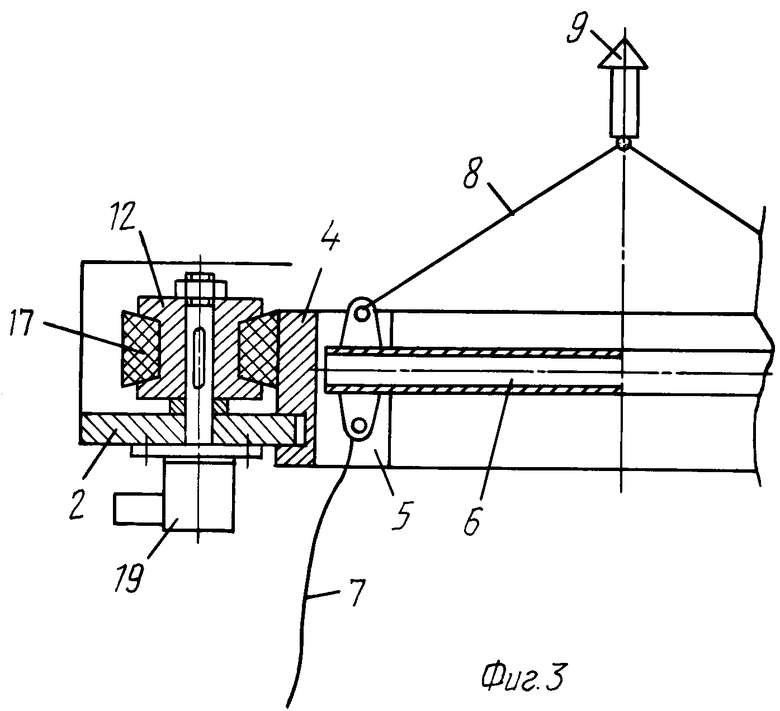
На фиг. 1 изображена схема подцепки груза к устройству для его транспортирования и монтажа летательным аппаратом, вид сбоку; на фиг. 2 - устройство для монтажа груза летательным аппаратом, вид сверху (без летательного аппарата); на фиг. 3 - то же, вид сбоку.
Устройство для монтажа груза летательным аппаратом, например вертолетом 1, включает раму 2, подсоединенную к вертолету гибкими связями 3. На раме 2 установлено кольцо 4 с возможностью вращения вокруг своей оси. На внутренней поверхности кольца выполнены диаметрально противоположные пазы 5. Ширина и глубина этих пазов позволяет разместить в них с зазорами концы траверсы 6 с подсоединенными к ним грузовыми канатами 7, которые снизу снабжены грузозахватами (крюками или электрозамками - не показаны). Траверса 6 посредством двух сходящихся связей 8 подсоединена к наконечнику 9, который фиксируется в замке 10 вертолета 1. Длина связей 3 и 8 подобрана так, чтобы при запирании наконечника 9 в замке 10 траверса 6 находилась на уровне рамы 2, а концы траверсы 6 размещались в пазах 5 кольца 4 с возможностью (при необходимости) выхода из них вниз. Такое соединение траверсы 6 с кольцом 4 обеспечивает передачу крутящего момента (при подсоединении наконечника 9 к замку 10) или их разъединение (при открытии замка 10 и выходе из него наконечника 9). На раме 2 снаружи кольца 4 установлены шкивы 11-16, которые огибаются замкнутыми гибкими элементами 17 и 18, например зубчатыми или клиновыми ремнями. В зависимости от профиля внутренней поверхности используемых ремней 17,18 контактирующая с ними рабочая поверхность шкивов 11-16 выполняется зубчатой или с клиновым профилем. Шкивы 11-16 установлены так, чтобы огибающие их гибкие элементы 17, 18 своей внешней поверхностью огибали кольцо 4 и контактировали с его наружной поверхностью с максимальным углом охвата. На раме 2 установлены двигатели 19 (например, реверсируемые электродвигатели с редукторами), связанные с одним или несколькими шкивами, например 11 и 14. На раме могут быть также установлены натяжные ролики 20 для выборки слабины гибких элементов 17, 18 и обеспечения расчетного крутящего момента при вытяжке ремней.
Устройство работает следующим образом.
Перед взлетом устройство подготавливают к работе: наконечник 9 подсоединяют к замку 10, а траверсу 6 устанавливают в рабочее положение в кольце 4. После взлета вертолета 1 и зависания над грузом 21 траверсу 6 ориентируют так, чтобы совместить грузозахваты на грузовых канатах 7 со строповочными узлами груза. Этого достигают включением двигателей 19 и перематыванием гибких элементов 17 и 18 в необходимом направлении. Кольцо 4 (изображенное на фиг. 3 в разрезе, чтобы показать рабочее положение траверсы 6) под действием сил трения, возникающих при контакте его наружной поверхности с внешней поверхностью гибких связей 17 и 18, поворачивается на раме 2 на необходимый угол по азимуту. При этом крутящий момент от кольца 4 через пазы 5 передается на траверсу 6, которая занимает необходимое положение, например, вдоль продольной оси вертолета (см. фиг. 1).
После подцепки и подъема груза 21 с земли траверсу 6 поворачивают так, чтобы привести груз в положение с минимальным аэродинамическим сопротивлением. С любым положением траверсы 6 по азимуту, определяемым конфигурацией груза 21, его транспортируют к месту монтажа. Возмущающие моменты, пытающиеся вывести в полете груз из заданного положения, через канаты 7 передаются на траверсу 6, которая через пазы 5 передает их на кольцо 4. Повороту последнего препятствуют силы трения между наружной поверхностью кольца 4 и гибкими элементами 17, 18. В результате положение груза в полете стабилизируется за счет превышения или равенства момента сил трения и динамического (возмущающего) момента. При увеличении динамического момента в полете сверх расчетного, например при росте аэродинамических сил, за счет превышения допустимой скорости транспортирования для данного груза или при резком маневрировании вертолета возможна пробуксовка кольца 4 относительно гибких элементов 17 и 18. В результате груз 21 самоустановится в положение, при котором будет соблюдаться равновесие моментов, без передачи на вертолет нерасчетных моментов. Таким образом становится возможной установка груза в оптимальное положение в полете, например, после ошибочного его ориентирования при подцепке к вертолету. В случае аварийной обстановки, когда необходимо сбросить груз, открывают замок 10, наконечник 9 со связями 8, траверса 6 с канатами 7 и грузом 21 отделяются от вертолета 1.
После переноса груза 21 вертолет 1 может зависать над местом монтажа с курсом, обеспечивающим оптимальные условия для монтажа (например, зависание против ветра обеспечит наибольшую грузоподъемность, исключит тряску вертолета и раскачивание груза). С помощью предлагаемого устройства устраняют рассогласование между грузом 21 и проектными отметками (фундаментом) по азимуту. Включив двигатели 19, поворачивают кольцо 4 в необходимом направлении, а вместе с ним и траверсу 6 с грузовыми канатами 7 и грузом 21 на необходимый угол. При ударных нагрузках в процессе монтажа могут возникать моменты, стремящиеся повернуть груз 21. Появившиеся при этом динамические (нерасчетные) моменты могут привести к повороту груза с проскальзыванием кольца 4 относительно гибких элементов 17 и 18, тем самым не оказывая влияния на управление вертолетом. При необходимости положение груза восстанавливают, поворачивая его при помощи двигателей 19 в обратном направлении на угол происшедшего пробуксовывания в ременной передаче. В других случаях, например при смене направления ветра на противоположное (что бывает в горах), в процессе монтажа с помощью устройства можно повернуть груз на угол 180o и более, чтобы вернуть груз в исходное положение после смены курса висения вертолета. После согласования груза 21 с фундаментом их сопрягают снижением вертолета. Закончив установку груза на фундамент, производят отцепку грузозахватов и направляют вертолет на посадку.
Предлагаемое устройство обеспечивает повышенные углы поворота груза (до ±360o и более, если это будет необходимо) для согласования его положения с проектными отметками при любом направлении ветра над монтируемым объектом или при изменении направления ветра в процессе монтажа. Кроме того, в предлагаемом устройстве механизм для передачи крутящего момента кольцу от двигателя (или двигателей) совмещает в себе и функцию предохранительной муфты, что позволит не допускать влияния непредвиденных сил и моментов на управление летательным аппаратом.

Изобретение относится к подъемно-транспортному машиностроению. Устройство для монтажа груза с помощью летательного аппарата содержит подсоединенную к летательному аппарату раму (2), на которой смонтировано поворотное кольцо с приводом, и траверсу (6), соединенную с замком летательного аппарата посредством сходящихся у замка связей. На внутренней поверхности кольца выполнены диаметрально противоположеные пазы, в которых размещены с возможностью передачи крутящего момента или выхода из них концы траверсы, к которым подсоединены грузовые канаты (7). На раме снаружи кольца установлены шкивы, сопряженные с внутренней поверхностью огибающих их гибких замкнутых элементов, которые противоположной поверхностью взаимодействуют с наружной поверхностью кольца с возможностью передачи крутящего момента и пробуксовывания при перегрузке. Один или несколько шкивов связаны с приводом. Изобретение расширяет функциональные возможности и повышает безопасность. 1 з.п. ф-лы, 3 ил.
| Устройство для монтажа и демонтажа груза дирижаблем | 1974 |
|
SU497197A1 |
| US 4378919 A, 05.04.1982 | |||
| US 3838836 A, 01.10.1974. | |||
