Изобретение относится к подъемно-транспортному машиностроению, в частности к устройствам для монтажа груза летательным аппаратом, например вертолетом.
Известно устройство для монтажа груза летательным аппаратом, содержащее сопряженные с замком летательного аппарата грузовые канаты с жестко закрепленной между ними траверсой, соединенной с системой ориентации груза по азимуту, связанной гибкими и упругими связями с летательным аппаратом (авт. свид. СССР N 981206, кл. B 66 F 11/02, 1981). Ориентирующая система выполнена в виде диска небольшого диаметра, снабженного по окружности отверстиями, при помощи которых фиксируется положение траверсы по азимуту. К диску для увеличения плеча прикреплена перпендикулярно траверсе (в нейтральном положении) стабилизирующая тяга, к которой и присоединены одни концы гибких и упругих связей в виде тросов с резиновыми амортизаторами. Другие концы этих связей присоединены к выступающим узлам летательного аппарата, в частности к стойкам шасси. Такое исполнение ориентирующей системы приводит к малоэффективной работе упругих гибких связей при поворотах траверсы от нейтрального положения на угол свыше ±45o.
Модернизированный вариант этого устройства (см. "Монтаж строительных конструкций с применением вертолетов", ВСН 463-85, Минмонтажспецстрой СССР, 1986, рис. 20) имеет те же недостатки.
Известно другое устройство для монтажа груза летательным аппаратом (вертолетом), наиболее близкое по технической сущности к заявляемому и являющееся прототипом. Оно содержит траверсу с грузовыми канатами на концах, присоединенную к замку летательного аппарата посредством промежуточных звеньев, систему ориентации груза по азимуту, соединенную с траверсой с возможностью передачи крутящего момента и выполненную в виде кольца, имеющего возможность вращения вокруг оси подвеса груза и связанного с летательным аппаратом (стойками шасси) упругими и гибкими связями - тросами с резиновыми шнуровыми амортизаторами (авт. свид. СССР N 2015073, кл. B 64 D 1/22, 1991 г). Кольцо имеет большой диаметр (для увеличения плеча действующих на него сил) и соединено с концами траверсы с возможностью передачи крутящего момента от упругих гибких связей в процессе работы устройства и с возможностью рассоединения при аварийном сбросе груза. Устройство обеспечивает заданную ориентацию груза при возмущающих моментах, стремящихся повернуть груз в горизонтальной плоскости, например, от воздействия встречного потока воздуха, закрученного потока воздуха от несущего винта вертолета или при возникновении динамических нагрузок (ударов) в процессе монтажа. При этом груз может повернуться вокруг оси подвеса к вертолету, а с ним и кольцо. Силы упругости в упругих связях (шнуровых амортизаторах), возрастающие вместе с увеличением угла поворота кольца вокруг оси подвеса, создают восстанавливающий (стабилизирующий) крутящий момент, поворачивающий кольцо в исходное положение. Упругие гибкие связи присоединены к кольцу по касательной, что обеспечивает постоянство плеча (равного радиусу кольца) для возникающих сил упругости. В результате устройство работоспособно при любой ориентации траверсы в диапазоне ±360o, так как стабилизирующий момент от упругих гибких связей не зависит от положения траверсы, а зависит лишь от угла закрутки кольца. Гибкие связи (тросы), подсоединенные параллельно упругим связям, ограничивают в допустимых пределах угол поворота кольца.
Недостатком известного устройства является то, что ориентацию и фиксацию траверсы в горизонтальной плоскости по азимуту можно выполнить только на земле перед полетом, например, используя информацию о направлении ветра, поступившую с места монтажа. При заходе вертолета на монтаж в случае ошибочной информации или изменения направления ветра не всегда возможно согласование продольной оси вертолета (который для достижения максимальной грузоподъемности должен висеть при монтаже против ветра) и соответственно зафиксированной на нем конструкции с проектным направлением осей груза, например, с фундаментом. В результате из-за неблагоприятного направления ветра возможны непроизводительные полеты вертолета на переподцепку конструкции.
Задачей настоящего изобретения является достижение технического результата, заключающегося в возможности управляемого в полете поворота груза в горизонтальной плоскости в диапазоне, обеспечивающем согласование положения груза по азимуту с проектными отметками при любом направлении ветра над местом монтажа, что полностью исключает непроизводительные полеты вертолета на переподцепку груза.
Достижение указанного технического результата обеспечивается тем, что устройство для монтажа груза летательным аппаратом, включающее траверсу с грузовыми канатами на концах, присоединенную к замку летательного аппарата посредством промежуточных звеньев, систему ориентации груза по азимуту, соединенную с траверсой с возможностью передачи крутящего момента и выполненную в виде кольца, имеющего возможность вращения вокруг оси подвеса груза и соединенного с летательным аппаратом посредством гибких и упругих связей, согласно изобретению дополнительно снабжено тяговым элементом, выполненным в виде отрезка гибкой связи, двумя приводными механизмами и по крайней мере одним отклоняющим блоком, причем гибкие и упругие связи прикреплены к отклоняющему блоку, тяговый элемент средней частью огибает отклоняющий блок и своими ветвями охватывает по внешней поверхности кольцо во встречных направлениях, а каждый свободный конец тягового элемента присоединен к одному из приводных механизмов. Кроме того, на внешней поверхности кольца выполнены канавки для витков тягового элемента, причем в качестве приводных механизмов могут быть использованы реверсируемые лебедки. Кольцо может быть снабжено двумя диаметрально противоположными пазами, в которых размещены концы траверсы с возможностью взаимной передачи крутящего момента и рассоединения при аварийном сбросе груза.
Сущность изобретения поясняется чертежами, где на фиг. 1 изображена схема размещения устройства на летательном аппарате, вид сбоку; на фиг. 2 - схема устройства, вид сверху (без летательного аппарата); на фиг. 3 - профиль кольца в сечении А-А по фиг. 2.
Устройство для монтажа груза летательным аппаратом, например вертолетом 1, включает траверсу 2 с грузовыми канатами 3, которые снизу снабжены грузозахватами 4 (крюками или электрозамками). Траверсу 2 посредством двух промежуточных звеньев 5 и наконечника 6 подцепляют к основному замку 7 вертолета. Траверса 2 связана с системой ориентации, в которую входят кольцо 8 с канавками 9 на внешней поверхности, тяговый элемент 10, отклоняющий блок 11, упругие связи 12, гибкие связи 13 и приводные механизмы 14 и 15. В качестве тягового элемента 10 может быть использован отрезок каната, цепи и т.п. Упругие связи 12 могут быть изготовлены из резинотканых шнуровых амортизаторов, а гибкие связи 13 - из тросов. В качестве приводных механизмов 14 и 15 могут быть использованы силовые цилиндры двустороннего действия или реверсируемые лебедки. Использование лебедок, на барабане каждой из которых закреплен и навит один из концов тягового элемента 10, предпочтительнее, поскольку они могут обеспечить наибольшую величину угла поворота кольца 8. Приводные механизмы могут быть установлены как снаружи вертолета, например, на основных стойках шасси (см. фиг. 1), так и внутри вертолета. Последний вариант установки механизмов 14 и 15 (внутри фюзеляжа) сопряжен с необходимостью ввода дополнительных отклоняющих блоков, обеспечивающих ввод концов тягового элемента 10 внутрь вертолета. В любом случае, т.е. при любом количестве отклоняющих блоков, к оси блока 11 прикреплены одни концы упругих связей 12, противоположные концы которых прикреплены к выступающим узлам вертолета 1, например, к передним стойкам шасси. Параллельно упругим связям 12 прикреплены гибкие связи 13, которые имеют длину, ограничивающую поворот кольца 8 до допустимой вытяжки амортизаторов 12.
На блоке 11 перегибают тяговый элемент 10 так, что образуются две его ветви: 10-1 и 10-2. Ветвь 10-1 одним или несколькими витками охватывает кольцо 8 (на фиг. 2 по часовой стрелке), и ее конец присоединен к механизму 14. Ветвь 10-2 также охватывает кольцо 8, но в противоположном направлении (на фиг. 2 против часовой стрелки), и ее конец присоединен к механизму 15. Наличие на внешней поверхности кольца 8 канавок 9 (см. фиг. 3), в которые уложены витки тягового элемента 10, натянутого упругими связями 12, обеспечивает удержание кольца 8 на весу в горизонтальной плоскости под фюзеляжем вертолета. Подбором длины промежуточных звеньев 5 обеспечивают положение траверсы 2 в плоскости кольца 8 внутри его. На кольце 8 выполнены диаметрально противоположные пазы 16, с которыми взаимодействуют концы траверсы 2 с возможностью передачи крутящего момента и с возможностью рассоединения при аварийном сбросе груза. Кроме того, на верхней поверхности кольца 8 над пазами 16 могут быть установлены ограничители 17, не допускающие выход концов траверсы 2 из пазов при уменьшении сил упругости в связях 12.
Устройство работает следующим образом.
После взлета и зависания вертолета 1 над грузом, например над конструкцией 18, ориентируют траверсу 2 так, чтобы совместить грузозахваты 4 со строповочными узлами груза. Этого достигают включением механизмов 14 и 15 (по схеме на фиг. 2 - в одном направлении, например, по часовой стрелке, что показано сплошными стрелками). За счет натяжения тягового элемента 10 упругими связями 12 кольцо 8 работает как канатоведущий шкив, на котором перематываются обе ветви 10-1 и 10-2 тягового элемента без изменения числа витков. При этом число витков тянущей (активной) ветви, например 10-1 (см. фиг. 2), на барабане тянущего механизма 14 увеличивается, а на барабане механизма 15 уменьшается число витков ветви 10-2. За счет сил трения между кольцом 2 и элементом 10 и благодаря возможности поворота всей подвески в замке 7 кольцо 8 (изображенное на фиг. 1 в разрезе, чтобы показать в нем положение траверсы 2) под действием усилия в тянущей ветви элемента 10 поворачивается в горизонтальной плоскости на необходимый угол по азимуту по часовой стрелке. Изменение направления действия механизмов 14 и 15 приводит к вращению кольца 8 в противоположном направлении (против часовой стрелки, что изображено штриховыми стрелками). Крутящий момент от кольца 8 через пазы 16 передается на траверсу 2, которая занимает необходимое положение по азимуту, например, вдоль продольной оси вертолета (см. фиг. 1 и 2).
После подцепки и подъема вертолетом груза 18 с земли траверсу 2 устанавливают в другое необходимое положение, и груз транспортируют к месту монтажа. Возмущающие моменты, пытающиеся в полете вывести груз из заданного положения, через канаты 3 передаются на траверсу 2, которая через пазы 16 передает их на кольцо 8. Повороту последнего препятствуют силы трения между наружной поверхностью кольца и витками тягового элемента 10. В результате положение груза 18 в полете стабилизируется за счет превышения (или равенства) величины момента сил трения над величиной динамического (возмущающего) момента. При увеличении динамического момента в полете сверх расчетного, например при росте аэродинамических сил за счет превышения допустимой скорости транспортирования для данного груза или при резком маневрировании вертолета, возможна пробуксовка кольца 8 относительно витков тягового элемента 10. В результате груз 18 самоустановится в положение, при котором будет соблюдаться равновесие моментов без передачи на вертолет нерасчетных моментов. Таким образом становится возможной установка груза в оптимальное положение в полете, например, после ошибочного его ориентирования при подцепке к вертолету. В случае аварийной обстановки, когда необходимо сбросить груз, открывают замок 7 - наконечник 6 со звеньями 5, траверса 2 с канатами 3 и грузом 18 отделяются от вертолета 1. При этом концы траверсы 2 выходят вниз из пазов 16, и на вертолете остаются кольцо 8 с тяговым элементом 10, упругие и гибкие связи 12, 13 с блоком 11.
При подлете или зависании вертолета с грузом 18 над местом монтажа, например над фундаментом, устраняют рассогласование между фактическим и проектным положениями груза по азимуту. Включив механизмы 14 и 15, поворачивают кольцо 8 в необходимом направлении, а вместе с ним и траверсу 2 с грузовыми канатами 3 и грузом 18. При необходимости угол поворота груза может быть больше 180o, например, при смене направления ветра на противоположное (что бывает в горах). После согласования по азимуту груза 18 с фундаментом их сопрягают снижением вертолета. Установив груз на фундамент, производят отцепку грузозахватов 4 и направляют вертолет на посадку.
Предлагаемое устройство конструктивно просто и не требует высокой точности изготовления деталей. Не предъявляются и высокие требования к точности сборки, поскольку в устройстве применена тихоходная передача гибким тяговым элементом, которая обеспечивает необходимую при монтаже вертолетом угловую скорость груза (обычно 2...5o/с, т.е. менее 1 об/мин). Устройство обеспечивает повышенные углы поворота груза по азимуту (до ±360o и более, если это будет необходимо) для согласования его положения с проектными отметками при любом направлении ветра над монтируемым объектом или при изменении направления ветра в процессе монтажа. Кроме того, примененная в предлагаемом устройстве передача крутящего момента от приводных механизмов совмещает в себе и функцию предохранительной муфты, что позволит не допускать влияния непредвиденных сил и моментов на управление летательным аппаратом.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ АЗИМУТАЛЬНОЙ ОРИЕНТАЦИИ И ФИКСАЦИИ ГРУЗА НА ВНЕШНЕЙ ПОДВЕСКЕ ЛЕТАТЕЛЬНОГО АППАРАТА | 2000 |
|
RU2209745C2 |
| УСТРОЙСТВО ДЛЯ МОНТАЖА ГРУЗОВ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 1999 |
|
RU2176211C2 |
| УСТРОЙСТВО ДЛЯ МОНТАЖА КОНСТРУКЦИЙ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 1998 |
|
RU2176011C2 |
| УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВАНИЯ И МОНТАЖА ГРУЗА ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2007 |
|
RU2350511C1 |
| УСТРОЙСТВО ДЛЯ АЗИМУТАЛЬНОЙ ОРИЕНТАЦИИ И СТАБИЛИЗАЦИИ ГРУЗА НА ВНЕШНЕЙ ПОДВЕСКЕ ЛЕТАТЕЛЬНОГО АППАРАТА | 2005 |
|
RU2307049C1 |
| УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВАНИЯ ГРУЗА ВЕРТОЛЕТАМИ | 1998 |
|
RU2149802C1 |
| СИСТЕМА ВНЕШНЕЙ ПОДВЕСКИ ГРУЗА К ВЕРТОЛЕТУ | 1995 |
|
RU2088482C1 |
| УСТРОЙСТВО ДЛЯ АЗИМУТАЛЬНОЙ ОРИЕНТАЦИИ ГРУЗА НА ВНЕШНЕЙ ПОДВЕСКЕ ЛЕТАТЕЛЬНОГО АППАРАТА | 2005 |
|
RU2308400C2 |
| СИСТЕМА ВНЕШНЕЙ ПОДВЕСКИ ГРУЗА К ВЕРТОЛЕТУ | 1998 |
|
RU2149803C1 |
| УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВАНИЯ И МОНТАЖА ГРУЗА ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2007 |
|
RU2372252C2 |


Изобретение относится к монтажным работам с помощью летательного аппарата, в частности вертолета. Устройство для монтажа груза летательным аппаратом включает в себя траверсу с грузовыми канатами на концах, присоединенную к замку летательного аппарата посредством промежуточных звеньев, систему ориентации груза по азимуту, соединенную с траверсой с возможностью передачи крутящего момента и выполненную в виде кольца, имеющего возможность вращения вокруг оси подвеса груза и связанного с летательным аппаратом посредством гибких и упругих связей. Устройство снабжено тяговым гибким элементом, двумя приводными механизмами и по крайней мере одним отклоняющим блоком, причем гибкие и упругие связи прикреплены к отклоняющему блоку, тяговый гибкий элемент средней частью огибает отклоняющий блок и своими ветвями охватывает по внешней поверхности кольцо во встречных направлениях, а каждый свободный конец тягового гибкого элемента присоединен к одному из приводных механизмов. Изобретение обеспечивает возможность управления в полете поворотом груза в горизонтальной плоскости в необходимом диапазоне. 3 з.п. ф-лы, 3 ил.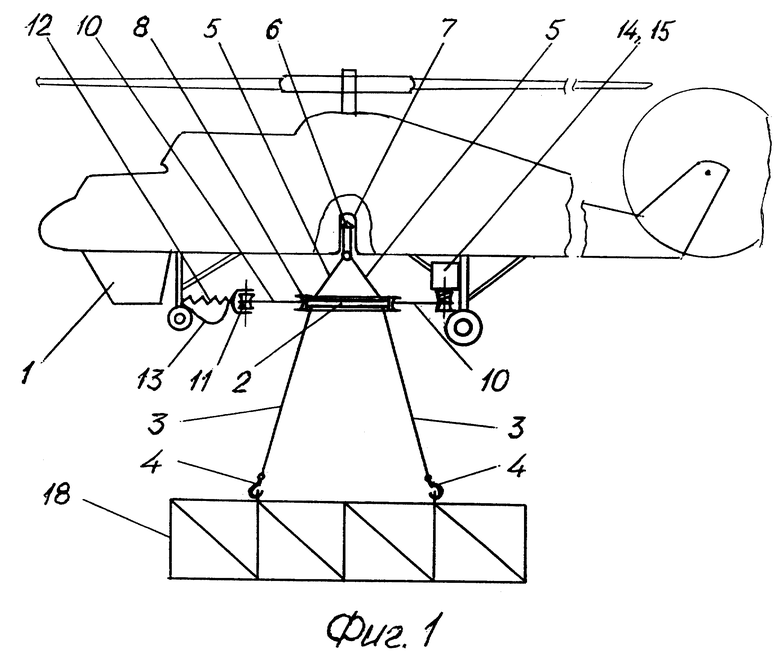
| СИСТЕМА ВНЕШНЕЙ ПОДВЕСКИ ГРУЗА К ВЕРТОЛЕТУ | 1991 |
|
RU2015073C1 |
| US 4378919 A, 05.04.1983 | |||
| УСТРОЙСТВО ДЛЯ СТАБИЛИЗАЦИИ ВРАЩЕНИЯ ГРУЗА | 1992 |
|
RU2009102C1 |
