Изобретение относится к области применения самолетов-истребителей и многофункциональных самолетов тактической авиации в ближнем воздушном бою.
Из известных аналогов ([1] , Фомин А. В. "СУ-27. История истребителя", М. , РА Интервестник, 1999 г. , стр. 71-245; [2] , Гришутин В. Г. "Лекции по авиационным системам стрельбы", Киев, КВВАИУ, 1982 г. , стр. 354-357; [3] , Сборник "Новости зарубежной науки и техники", ГосНИИАС, N 11, 1992 г. , стр. 15-20).
Наиболее близким является, приведенный в [1] боевой комплекс, содержащий высокоманевренный самолет, комплект средств поражения и противодействия, систему параметров движения самолета, систему воздушных параметров, систему обзорно-прицельных параметров, индикационно-управляющую систему, бортовую вычислительную систему.
При выполнении в воздушном бою эффективных маневров (сверхманевры) типа "Хук", "Кобра", "Колокол" ([1] , стр. 81-84) с большими углами атаки 80o-110o и малыми составляющими истинной воздушной скорости, система воздушных параметров фактически становится неработоспособной, так как выдает ложные воздушные параметры.
В данной ситуации экипаж выполняет упомянутые сверхманевры интуитивно, а применения средств поражения типа ракет воздух-воздух практически невозможно, что является недостатком ближайшего аналога.
Задачей изобретения является расширение функциональных возможностей комплекса посредством восстановления воздушных параметров в диапазоне недостоверной работы (и при отказах) системы воздушных параметров, формирования управляющих сигналов для выполнения сверхманевров, применения средств поражения и противодействия при выполнении сверхманевров.
Достигается указанный технический результат тем, что боевой комплекс воздушного боя, содержащий высокоманевренный самолет и механически к нему подсоединенный комплект средств поражения и противодействия; установленные на высокоманевренном самолете взаимосоединенные входами-выходами по каналу информационного обмена систем между собой и с входами-выходами высокоманевренного самолета и комплекта средств поражения и противодействия, систему параметров движения самолета, систему воздушных параметров, систему обзорно-прицельных параметров, индикационно-управляющую систему, бортовую вычислительную систему, включающую взаимосоединенные по каналу внутреннего информационного обмена вычислительно-логические модули объединенной базы данных, отображения синтезированной информации, навигации и комплексной обработки информации, стабилизации и управления самолетом и двигательной установкой, применения средств поражения и противодействия, ввода-вывода-управления информационным обменом, второй вход-выход которого подключен к входу-выходу бортовой вычислительной системы, дополнительно снабжен вычислительно-логическими модулями формирования воздушных параметров при выполнении сверхманевров и управления самолетом и двигательной установкой при выполнении сверхманевров, введенными в состав бортовой вычислительной системы, взаимосоединенными между собой и вышеупомянутыми вычислительно-логическими модулями бортовой вычислительной системы по ее каналу внутреннего информационного обмена.
На фиг. 1 представлена блок-схема комплекса, содержащего:
1 - системы параметров движения самолета СПДС,
2 - система воздушных параметров СВП,
3 - система обзорно-прицельных параметров СОПП,
4 - индукационно-управляющая система ИУС,
5 - бортовая вычислительная система БВС,
6 - высокоманевренный самолета ВМС,
7 - комплект средств поражения и противодействия КСП,
8 - канал информационного обмена систем КИОС. Двойной линией обозначено механическое соединение (крепление) КСП 7 к ВМС 6.
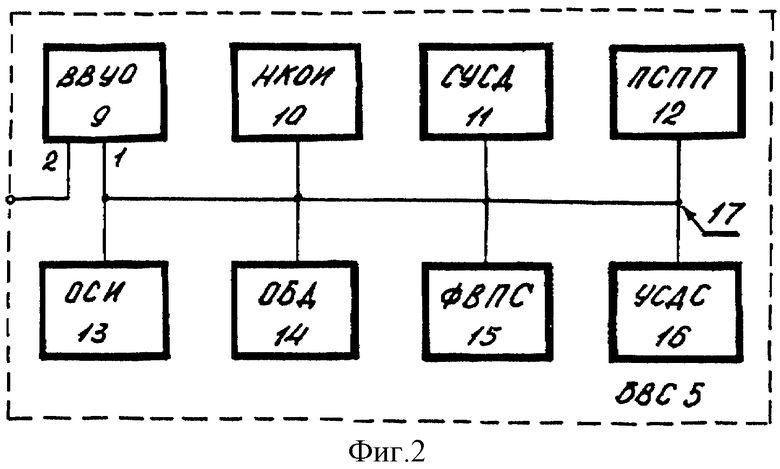
На фиг. 2 представлена блок-схема БВС 5, содержащая вычислительно-логические модули (ВЛМ):
9 - ввод-вывод - управление информационным обменом ВВУО,
10 - навигация и комплексная обработка информации НКОИ,
11 - стабилизация и управление самолетом и двигательной установкой СУСД,
12 - применение средств поражения и противодействия ПСПП,
13 - отображение синтезированной информации ОСИ,
14 - объединенная база данных ОБД,
15 - формирование воздушных параметров при выполнении сверхманевров ФВПС,
16 - управление самолетом и двигательной установкой при выполнении сверхманевров УСДС,
17 - канал внутреннего информационного обмена КВИО.
ВВУО 9 является стандартным устройством ([4] , Преснухин Л. Н. , Нестеров П. В. "Цифровые вычислительные машины", М. , Высшая школа, 1981 г. , стр. 394-406), обеспечивающим ввод-вывод в (из) ВЛМ БВС6, управление внутренним информационным обменом по КВИО 17 и информационным обменом между системами комплекса, ВМС 6 и КСП 7 по КИОС 8.
НКОИ 10, СУСД 11, ПСПП 12, ОСИ 13, ОБД 14 и дополнительно введенные ВЛМ ФВПС 15 и УСДС 16 выполнены по стандартной схеме на стандартных вычислительных блоках ([4] , стр. 30, 31) - взаимосоединенных в запоминающем устройстве и процессоре с выходом на КВИО 17.
СПДС 1 содержит ([5] , Помыкаев И. И. и др. "Навигационные приборы и системы", М. , Машиностроение, 1983 г. , стр. 380) физически разнородные датчики параметров движения самолета (например, инерциально-спутниковую систему, радиовысотомер, цифровую карту высот рельефа местности), формирует и выдает по КИОС 8 во взаимодействующие системы и через вход-выход БВС 6, через ВВУО 9 по КВИО 17 в ВЛМ БВС 6 сигналы параметров движения самолета:
- составляющие местоположения самолета λi (i= 1; 2; 3), здесь абсолютная высота полета Н = λ3 формируется на основе инерциально-спутниковых данных, измерений радиовысотомера и данных цифровой карты рельефа местности,
- составляющие путевой скорости движения в земной системе координат - vi,
- углы эволюций самолета (курс, крен, тангаж) - γi,
- составляющие угловой скорости -  ,
,
- составляющие линейных ускорений (перегрузок) - ni. СВП 2 формирует и выдает ([5] стр. 44-51) по КИОС 8 во взаимодействующие системы воздушные параметры:
- углы атаки и скольжения α, β;
- модуль истинной воздушной скорости vи,
- составляющие истинной воздушной скорости vиi,
- температуру наружного воздуха Т,
- приборную скорость v0,
- число Маха M,
- скоростной напор q,
- абсолютную барометрическую высоту Ha,
- сигнал u≥0 отказа (отключения при выполнении сверхманевров, например, при α > 30o), исправности u < 0.
СОППЗ содержит обзорно-прицельные средства ([2] , стр. 358-374) обнаружения и сопровождения целей в радиолокационном и оптическом диапазоне локации, формирует и выдает по КИОС 8 во взаимодействующие системы дальность до цели Д, скорость измерения дальности  , углы визирования цели по азимуту А и углу места φ, сигналы идентификации целей.
, углы визирования цели по азимуту А и углу места φ, сигналы идентификации целей.
ИУС 4 содержит ([2] , стр. 356), индикатор на лобовом стекле, многофункциональные индикаторы отображения синтезированных информационных кадров с кнопками-клавишами вызова данных и назначения режимов полета и боевого применения, органы ручного управления самолетом и двигательной установкой, пуском средств поражения и противодействия, отрабатывающие подсистемы - систему дистанционного управления самолетом, формирующую сигналы на исполнительные устройства самолета и двигательной установки и систему управления оружием, формирующие сигналы на подготовку и пуск средств поражения и противодействия. Связь ИУС 4 с ВМС 6, КСП 7 и другими системами осуществляется по КИОС 8.
КСП 7 содержит ([1] , стр. 244, 245) средств поражения (по воздушным целям это ракеты воздух-воздух, пушечная установка) и противодействия (дипольные отражатели радиолокационного излучения, ложные тепловые цели - горящие шашки), прием сигналов на подготовку и пуск средств поражения и противодействия и передача ответных сигналов о состоянии (готовность к пуску, отключение механической связи, сход) этих средств осуществляется через вход-выход КСП по КИОС 8.
ВМС 6 содержит ([1] , стр. 157-243) органы управления самолетом (руль высоты, руль направления, элероны и др. ) и двигательной установкой (сектор газа, устройство поворота вектора тяги), устройства крепления средств поражения и противодействия из состава КСП 7 (двойная линия на фиг. 1). Прием сигналов от взаимодействующих систем и выдача ответных сигналов о состоянии (положения) рулей и устройства поворота вектора тяги осуществляется через вход-выход ВМС 6 по КИОС 8.
БВС 6 является вычислительной системой, содержащей ВЛМ:
- ВВУО 9, осуществляющий порядок взаимного информационного обмена между ВЛМ БВС 5 по КВИО 17, прием-передачу данных по первому входу-выходу от взаимодействующих ВЛМ по КВИО 17, прием-передачу сигналов от взаимодействующих систем по второму входу-выходу, подключенному ко входу-выходу БВС 5, осуществляет порядок информационного обмена между системами по КИОС 8;
- ОБД 14, являющийся устройством запоминания введенных перед полетом (например, через ИУС 4) параметров маршрута полета, заданных параметров выполняемых маневров (в том числе и сверхманевров), параметров типовых целей и средств противодействия противника и другие заданные параметры. С выхода-входа ОБД 14 сигналы вышеупомянутых параметров через КВИО 17 поступают во взаимодействующие ВЛМ;
- ОСИ 13, в котором векторно-растровым способом формируются кадры изображений по текущим режимам полета, в частности в ближнем воздушном бою формируется кадр изображения с отображением взаимного положения атакуемого и атакующего самолетов с наложением всех параметров, необходимых для принятия экипажем решений, и текстовых подсказок. С входа-выхода ОСИ 13 сигналы кадров изображений через КВИО 17, первый вход-выход ВВУО 9, второй вход-выход ВВУО 9, вход-выход БВС 5, КИОС 8 поступают на вход-выход ИУС 4 для отображения на многофункциональных индикаторах и индикаторе на лобовом стекле;
- НКОИ 10, в котором по поступившим от СПДС 1 и СВП 2 параметрам при u<0 осуществляется взаимная коррекция данных физически разнородных датчиков, например коррекция координат местоположения λi и составляющих путевой скорости vi инерциальных измерений по данным спутниковой системы навигации, коррекции составляющих vиi истинной воздушной скорости от СВП 2 по данным спутниковой системы навигации с выделением систематических составляющих скорости ветра  , коррекция модели температуры наружного воздуха по данным датчика температуры, с выделением погрешности температурного градиента Δτ, коррекция абсолютной инерциально-спутниковой высоты по данным Ha от СВП 2 или по данным геометрической высоты Hг от радиовысотомера и высоты рельефа от цифровой карты рельефа местности. В общем виде, полагая, что параметр Пи, измеряемый корректируемой системой, имеет погрешность
, коррекция модели температуры наружного воздуха по данным датчика температуры, с выделением погрешности температурного градиента Δτ, коррекция абсолютной инерциально-спутниковой высоты по данным Ha от СВП 2 или по данным геометрической высоты Hг от радиовысотомера и высоты рельефа от цифровой карты рельефа местности. В общем виде, полагая, что параметр Пи, измеряемый корректируемой системой, имеет погрешность  , близкую к систематической, а параметр Пк , измеряемый корректирующей системой, имеет флюктуационную центрированную погрешность
, близкую к систематической, а параметр Пк , измеряемый корректирующей системой, имеет флюктуационную центрированную погрешность  типа белого шума, осуществляется оптимальная коррекция ([6] , Э. Сейдж, Дж. Мэлс "Теория оценивания и ее применения в связи и управлении", М. , Связь, 1976 г. , стр. 238, 289); оценка систематической погрешности параметра корректируемой системы имеет вид
типа белого шума, осуществляется оптимальная коррекция ([6] , Э. Сейдж, Дж. Мэлс "Теория оценивания и ее применения в связи и управлении", М. , Связь, 1976 г. , стр. 238, 289); оценка систематической погрешности параметра корректируемой системы имеет вид
(здесь  , d0 - начальное значение дисперсии
, d0 - начальное значение дисперсии  ), откуда следует, что с течением времени
), откуда следует, что с течением времени  , соответственно откорректированный параметр
, соответственно откорректированный параметр
стремится к действительному значению П.
При выполнении сверхманевра и выхода на большие углы атаки (α > 30o) по команде u≥0 оценки погрешностей  запоминаются и откорректированные в момент окончания коррекции сигналы параметров
запоминаются и откорректированные в момент окончания коррекции сигналы параметров  ,
,  ,
,  ,
,  систематических составляющих скорости ветра
систематических составляющих скорости ветра  , погрешность температурного градиента
, погрешность температурного градиента  с входа-выхода НКОИ 10 через КВИО 17 поступают в ФВПС 15, УСДС 16 и в ОСИ 13 для формирования индикационных кадров;
с входа-выхода НКОИ 10 через КВИО 17 поступают в ФВПС 15, УСДС 16 и в ОСИ 13 для формирования индикационных кадров;
- СУСД 11, в котором для всех режимов полета (кроме режима выполнения сверхманевров) формируются сигналы стабилизации и управления самолетом и сектором газа и направлением вектора тяги двигательной установки ([7] , Михалев И. А. и др. "Системы автоматического управления самолетом", М. , Машиностроение, 1971 г. , стр. 187-391; [2] , стр. 235, 236) как функции параметров состояния самолета, воздушных параметров и при выполнении боевых маневров как функции относительного движения цели относительно самолета, сигналы δк (к - количество органов управления) с входа-выхода СУСД 11 через КВИО 17, ВВУО 9 с входа-выхода БВС 5 через КИОС 8 поступают на вход-выход ИУС 4, с входа-выхода которого сигналы δку (сигналы δк в виде, воспринимаемом исполнительными устройствами ВМС 6) поступают на вход-выход ВМС 6,
- дополнительно введенный ВЛМ ФВПС 16 по поступившим сигналам при выполнении сверхманевров формирующий модуль истинной воздушной скорости
угол атаки  и угол скольжения
и угол скольжения  ([8] , Гуськой Ю. П. , Загайнов Г. И. "Управление полетом самолетов", М. , Машиностроение, 1980 г. , стр. 29, 30); температуру наружного воздуха ([9] , Боднер В. А. "Приборы первичной информации", М. , Машиностроение, 1981 г. , стр. 297)
([8] , Гуськой Ю. П. , Загайнов Г. И. "Управление полетом самолетов", М. , Машиностроение, 1980 г. , стр. 29, 30); температуру наружного воздуха ([9] , Боднер В. А. "Приборы первичной информации", М. , Машиностроение, 1981 г. , стр. 297)  (здесь постоянные величины: Т0 - абсолютная температура на уровне моря, τ0 - заданный температурный градиент), число Маха
(здесь постоянные величины: Т0 - абсолютная температура на уровне моря, τ0 - заданный температурный градиент), число Маха  (здесь постоянные величины: g - ускорения силы тяжести, a - показатель адиабаты для воздуха, R - газовая постоянная), и при
(здесь постоянные величины: g - ускорения силы тяжести, a - показатель адиабаты для воздуха, R - газовая постоянная), и при
приборную скорость
и скоростной напор  = q0•f (здесь q0 - давление на уровне моря), сформированные воздушные параметры
= q0•f (здесь q0 - давление на уровне моря), сформированные воздушные параметры 
 с входа-выхода ФВПС 15 по КВИО 17 поступают на входы-выходы ПСПП 12, УСДС 16, ОСИ 13;
с входа-выхода ФВПС 15 по КВИО 17 поступают на входы-выходы ПСПП 12, УСДС 16, ОСИ 13;
- дополнительно введенный ВЛМ УСДС 16 по команде, заданной экипажем с ИУС 4 на выполнение конкретного сверхманевра в воздушном бою, на основе параметров состояния самолета, параметров движения цели относительно самолета, измеренных воздушных параметров (при u < 0) и сформированных в ФВПС 15 воздушных параметров (при u ≥ 0) формирует сигналы автоматического управления двигательной установкой.
Например, при движении без крена в продольной плоскости ([8] , Боднер В. А. "Теория автоматического управления полетом", М. , Наука, 1964 г. , стр. 34-37) при выполнении маневра с большими углами тангажа ϑ, большими углами атаки α и малыми составляющими воздушной скорости vиi будет скоростной напор q, подъемная сила и сила сопротивления близки к нулю, силы и моменты, создаваемые рулями, неэффективны, тогда движение в воздушной среде описывается зависимостями

(здесь α - угол атаки, ϑ - угол тангажа, P1, P2 - составляющие тяги по осям самолета).
При управляемых составляющих P1 и P2 в УСДС 16 по поступившим параметрам формируются сигналы управления
(здесь θ3, vи3 - заданные сигналы управления), поступающие в ОСИ 13 для формирования информационных кадров на многофункциональных индикаторах ИУС 4; сигналы автоматического управления
(здесь F1, F2 - заданные функции времени), которые с входа-выхода УСДС 16 через КВИО 17, ВВУО 9, с входа-выхода БВС 5 через КИОС 8, ИУС 4 поступают на вход-выход ВМС 6 для управления двигательной установкой, обеспечивающей составляющие вектора тяги Р1= x1(t), P2= x2(t).
Тогда движения в замкнутой системе при 
будет
соответственно
θ = F1(τ1p+1)-1, vи= F2(τ1p+1)-1
(здесь p - оператор дифференцирования, τ1 - постоянная времени) и при ,
, ,
,
θ = θ3(t),
vи= vи3(t),
где по заданным функциям времени θ3(t), vи3(t) обеспечивается траекторное движение в продольной плоскости и угловое движение по тангажу и углу атаки заданного сверхманевра ([1] , стр. 81-84) в режимах атаки или обороны ближнего воздушного боя.
В режиме ручного управления выполняемые сверхманевром команды, например, заданных углов γi3(t) формируются в УСДС 16 (или задаются экипажем с ИУС 4), поступают в ИУС 4, откуда управляющие сигналы Qi(γi3-γi) через КИОС 8 поступают на вход-выход ВМС 6 для управления рулями, направлением вектора тяги и сектором газа двигательной установки для отработки γi→ γi3;
- в ВЛМ ПСПП 12 при выполнении воздушного боя на сверхманеврах в соответствии с тактикой воздушного боя, если ВМС 6 является атакуемым, то в начале выполнения сверхманевра по команде экипажа, поступающей в КСП 7, осуществляется пуск средств противодействия (дипольные отражатели радиолокационного излучения, ложные тепловые цели), при этом команда заданного времени пуска формируется на основе параметров относительного движения атакующего и атакуемого самолетов в ПСПП 12 и поступает в ИУС 4 для принятия решения экипажем. Пуск средств противодействия может осуществляться в процессе завершения сверхманевра, когда ВМС 6 становится атакующим и соответственно вышеупомянутые средства обеспечивают увод прицельных средств и средств поражения противника на ложные цели. При применении в качестве средства противодействия самонаводящихся ракет воздух-воздух типа ([1] , стр. 244, 245) в ПСПП 12 проводится расчет гарантированной дальности пуска
Dг= D1+D2+D3+Dп-Dс,
где D1 - дальность, пройденная ракетой на неуправляемом участке ее полета после схода с ВМС 6, D2 - дальность, пройденная ракетой на активном участке ее работающего двигателя, D3 - дальность, пройденная ракетой на пассивном участке ее полета с отработавшим двигателем и эффективными аэродинамическими характеристиками, Dп - дальность, пройденная противником за время полета ракеты tp; Dc(tp)= Dc - дальность, пройденная самолетом за время полета, за время tp.
Модели движения во времени скорости полета ракеты на первом, втором и третьем участках (j= 1; 2; 3) ее движения, ВМС (j= 4) и атакуемого самолета противника (j= 5) vji(t) хранятся в ОБД 14 и через КВИО 17 поступают в ПСПП 12, где формируются гарантированная дальность за время полета ракеты tp
при этом начальными условиями каждого участка движения ракеты являются конечные условия движения предыдущего участка, а начальными условиями первого участка являются составляющие воздушной скорости ВМС 6 в момент схода ракеты, определяемые  ; и минимально допустимая дальность Dм, определяемая условиями безопасности ВМС 6 от взрыва пущенной им ракеты и временем срабатывания взрывателя ракеты
; и минимально допустимая дальность Dм, определяемая условиями безопасности ВМС 6 от взрыва пущенной им ракеты и временем срабатывания взрывателя ракеты
Dм= DБ+D(tB),
где DБ, tB поступают из ОБД 14, D(tB) считается по вышеприведенной зависимости Dг за время tB.
Головка самонаведения ракеты (ГСНР) имеет угловой раствор по азимуту Ap1 и углу места φp, ГСНР включается в подвешенном состоянии по команде "подготовка". Если А>Ар, φ > φp, ВМС 6 доворачивается на цель по рассогласованию (Ар-А), (φp-φ) (здесь А, φ - углы визирования цели, измеренные СОППЗ) и при выполнении условий гарантированного захвата цели ГСНР А<<Ар, φ ≪ φp, Dм<Dт<Dг (здесь D - текущая дальность до цели, измеряемая СОПП 3) в ПСПП 12 формируется команда "пуск разрешен", поступающая на индикационные средства ИУС 4 и по выдаче экипажем команды "пуск", поступающей с входа-выхода ИУС 4 через КИОС 8 на вход-выход КСП 7 и на конкретную подготовленную ракету, после размыкания механических связей осуществляется ее пуск.
Таким образом, на примере технической реализации показана возможность восстановления воздушных параметров при больших углах атаки и тангажа при выполнении в воздушном бою ВМС 6 сверхманевров и применения средств поражения и противодействия, что обеспечивает существенное повышение показателей боевой эффективности.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОФУНКЦИОНАЛЬНЫЙ САМОЛЕТ | 2000 |
|
RU2174932C1 |
| БОРТОВОЙ ИНФОРМАЦИОННО-УПРАВЛЯЮЩИЙ КОМПЛЕКС МНОГОЦЕЛЕВОГО ДВУХМЕСТНОГО САМОЛЕТА | 2000 |
|
RU2166794C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ДВУХМЕСТНЫЙ ВЫСОКОМАНЕВРЕННЫЙ САМОЛЕТ ТАКТИЧЕСКОГО НАЗНАЧЕНИЯ | 2001 |
|
RU2184683C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ САМОЛЕТ | 2003 |
|
RU2231478C1 |
| АВИАЦИОННЫЙ КОМПЛЕКС ДЛЯ ГРУППОВЫХ ДЕЙСТВИЙ МНОГОФУНКЦИОНАЛЬНЫХ САМОЛЕТОВ | 2000 |
|
RU2177438C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ДВУХМЕСТНЫЙ БОЕВОЙ ВЕРТОЛЕТ | 2002 |
|
RU2212632C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ САМОЛЕТ ТАКТИЧЕСКОГО НАЗНАЧЕНИЯ | 2003 |
|
RU2226166C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ МНОГОФУНКЦИОНАЛЬНОГО САМОЛЕТА | 2011 |
|
RU2488775C1 |
| Способ управления вооружением многофункциональных самолетов тактического назначения и система для его осуществления | 2019 |
|
RU2725928C1 |
| ПРИЦЕЛЬНАЯ СИСТЕМА | 1998 |
|
RU2129696C1 |
Изобретение относится к технике управления самолетами-истребителями и самолетами тактической авиации в ближнем воздушном бою. Многофункциональный самолет содержит комплект средств поражения и противодействия, систему параметров движения самолета, систему воздушных параметров, систему обзорно-прицельных параметров, индикационно-управляющую систему и бортовую вычислительную систему с вычислительно-логическими модулями объединенной базы данных, отображения синтезированной информации, навигации и комплексной обработки информации, стабилизации и управления самолетом и двигательной установкой, применения средств поражения и ввода-вывода-управления информационным обменом, формирования воздушных параметров при выполнении сверхманевров и управления самолетом и двигательной установкой при выполнении сверхманевров. Системы связаны каналом информационного обмена систем, а модули в бортовой вычислительной системе - каналом внутреннего информационного обмена. Самолет обладает расширенными функциональными возможностями, поскольку в нем обеспечивается восстановление воздушных параметров при их недостоверности, а также формирование управляющих сигналов для сверхманевров и применения средств поражения и противодействия при выполнении сверхманевров. 2 ил.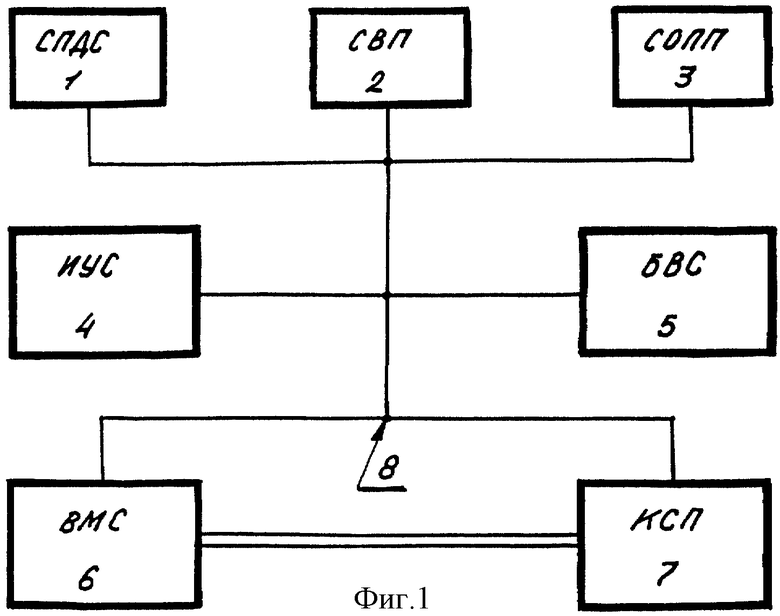
Многофункциональный высокоманевренный самолет, содержащий комплект средств поражения и противодействия, а также взаимосоединенные входами-выходами с его входом-выходом и между собой по каналу информационного обмена систем систему параметров движения самолета, систему воздушных параметров, систему обзорно-прицельных параметров, индикационно-управляющую систему и бортовую вычислительную систему, включающую в себя взаимосоединенные по каналу внутреннего информационного обмена вычислительно-логические модули объединенной базы данных, отображения синтезированной информации, навигации и комплексной обработки информации, стабилизации и управления самолетом и двигательной установкой, применения средств поражения и ввода-вывода-управления информационным обменом, второй вход-выход последнего из которых подключен к входу-выходу бортовой вычислительной системы, отличающийся тем, что он дополнительно снабжен вычислительно-логическими модулями формирования воздушных параметров при выполнении сверхманевров и управления самолетом и двигательной установкой при выполнении сверхманевров, введенными в состав бортовой вычислительной системы и взаимосоединенными между собой и вышеупомянутыми вычислительно-логическими модулями бортовой вычислительной системы по ее каналу внутреннего информационного обмена.
| ФОМИН А.В | |||
| Прибор с двумя призмами | 1917 |
|
SU27A1 |
| История истребителя | |||
| - М.: РА Интервестник, 1999, с.71-245 | |||
| КОМПЛЕКСНАЯ СИСТЕМА ФОРМИРОВАНИЯ ВОЗДУШНЫХ ПАРАМЕТРОВ | 1998 |
|
RU2146805C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВУХДВИГАТЕЛЬНЫМ МАНЕВРЕННЫМ САМОЛЕТОМ | 1996 |
|
RU2099244C1 |
| RU 93033379 А, 27.11.1996 | |||
| КОМПЛЕКСНАЯ СИСТЕМА НАВИГАЦИИ | 1998 |
|
RU2146803C1 |

