Изобретение относится к авиационному приборостроению, в частности к информационным средствам навигации, прицеливания и пилотирования летательных аппаратов.
Из известных комплексных систем навигации на основе комплексной обработки данных системы воздушных сигналов и данных корректирующей системы в качестве прототипа выбирается комплексная система навигации, описание которой приведено в книге [1] Помыкаева И.И. и др. "Навигационные приборы и системы", Москва, Машиностроение, 1983 г., стр. 385-388. Структурная схема прототипа приведена на фиг. 1, где обозначено:
СВС - система воздушных сигналов, БПК - блок преобразования координат, БАС - блок алгебраического суммирования, КС - корректирующая система, БК - блок коррекции, БФК - блок формирования координат.
В БПК по поступившим на первый-третий входы с первого-третьего выходов СВС воздушным параметрам V, α, β (модуль истинной воздушной скорости, углы атаки и скольжения) и на четвертый-шестой входы с первого-третьего выходов КС углам эволюций летательного аппарата ψ, γ, ν (углы курса, крена и тангажа) формируются соответствующие воздушные скорости в земной системе координат V1, V2, V3, которые с первого-третьего выхода БПК поступают на первый-третий входы БАС, на четвертый-шестой входы которого поступают составляющие путевой скорости в земной системе координат V1п, V2п, V3п. На седьмой-девятый входы БАС поступают корректирующие сигналы X1, X2, X3 с первого-третьего выходов БК, на первый-третий входы которого поступают сигналы (Vi - Xi - Viп) (здесь i = 1, 2, 3), по которым формируются корректирующие сигналы xi = (TP)-1 • (Vi - Xi - Viп),
где T - постоянная времени;
P - оператор дифференцирования.
При  (здесь Vi0 - точное значение составляющих путевой скорости; Δi - погрешность; Ui,
(здесь Vi0 - точное значение составляющих путевой скорости; Δi - погрешность; Ui,  - систематическая и флуктуационная (порывы ветра) центрированная погрешности).
- систематическая и флуктуационная (порывы ветра) центрированная погрешности).
Например, при Δi = const , Ui = const с течением времени осуществляется подавление флуктуационной погрешности  до любого близкого к нулю уровня и выделение (Δi-ui)
до любого близкого к нулю уровня и выделение (Δi-ui)
В БАС формируются откорректированные составляющие путевой скорости Vik = Vi - Xi = Viо + Ui, которые с четвертого-шестого выходов БАС выдаются потребителям и поступают на пятый-шестой входы БФК, где формируются координаты местоположения λi = ∫ viкdt , которые с первого-третьего выходов БФК выдаются потребителям. Сигналы xi = (Δi-ui) ) с первого-третьего выходов БК также выдаются потребителям (в систему управления, в систему индикации, в прицельную систему), но систематические составляющие скорости ветра Ui выдаются с погрешностью Δi , что является недостатком прототипа.
Техническим результатом, достигаемым при использовании предлагаемого технического решения, является повышение точности работы системы.
Достигается технический результат тем, что в комплексную систему навигации, содержащую последовательно соединенные по первым-третьим выходам - входам систему воздушных сигналов, блок преобразования координат, блок алгебраического суммирования, блок коррекции, подключенную первым-третьим выходами к четвертому-шестому входам блока преобразования координат корректирующую систему, четвертый-шестой выходы которой подключены соответственно к четвертому-шестому входам блока алгебраического суммирования, блок формирования координат, на первый-третий входы которого подключены соответственно четвертый-шестой выходы блока алгебраического суммирования, на седьмой-девятый вход которого подключены первый-третий выходы блока коррекции, дополнительно введены блок запаздывания, блок идентификации погрешностей, блок оптимальной фильтрации и блок формирования составляющих скорости ветра, на первый-третий входы которого подключены первый-третий выходы блока формирования координат. Четвертый-двенадцатый выходы блока преобразования координат подключены к первому-девятому входам блока запаздывания, на десятый-двенадцатый выходы которого подключены седьмой-девятый выходы блока алгебраического суммирования. Первый-третий выходы системы воздушных сигналов подключены также к десятому-двенадцатому входам блока алгебраического суммирования, на тринадцатый-пятнадцатый входы которого подключены первый-третий выходы блока оптимальной фильтрации, четвертый-девятый выходы которого подключены к четвертому-девятому входам блока формирования составляющих скорости ветра. На первый-восемнадцатый входы блока оптимальной фильтрации подключены первый-восемнадцатый выходы блока идентификации погрешностей, на первый-сорок пятый входы которого подключены первый-сорок пятый выходы блока запаздывания, на тринадцатый-пятнадцатый входы которого подключены первый-третий выходы блока формирования координат.
На фиг. 1 представлена структурная схема прототипа.
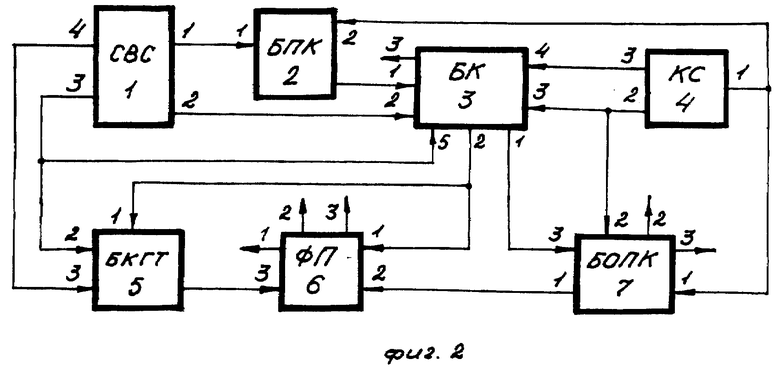
На фиг. 2 представлена структурная схема предлагаемой системы, содержащей: 1 - система воздушных сигналов СВС, 2 - блок алгебраического суммирования БАС, 3 - корректирующая система КС, 4 - блок преобразования координат БПК, 5 - блок коррекции БК, 6 - блок формирования координат БФК, 7 - блок запаздывания БЗ, 8 - блок идентификации погрешностей БИП, 9 - блок оптимальной фильтрации БОФ, 10 - блок формирования составляющих скорости ветра БФВ.
В качестве КСЗ используется, например, инерциально-спутниковая система (см. книгу [2] Бабича О.А. "Обработка информации в навигационных комплексах", Москва, "Машиностроение", 1991 г., стр. 476-478).
Составляющие скорости ветра принимаются в виде (см. книгу [3] Загайнова Г. И. "Управление полетом самолета", Москва, Машиностроение, 1980 г., стр. 132)  , где Ui0 = const, Ui1 = const,
, где Ui0 = const, Ui1 = const,  - центрированные независимые случайные процессы; λi - координаты местоположения летательного аппарата.
- центрированные независимые случайные процессы; λi - координаты местоположения летательного аппарата.
Система работает следующим образом.
СВС1 измеряет и выдает с первого-третьего выходов параметры модуля путевой скорости v = v0+Δ1 , угла атаки α = α0+Δ2 , угла скольжения β = β0+Δ3 (здесь с индексом "0" обозначены точные значения параметров, Δi = const - погрешности), поступающие на первый-третий входы БПК4 и на десятый-двенадцатый входы БАС2.
КСЗ формирует параметры углов курса ψ , крепа γ и тангажа ν и составляющих путевой скорости, Vin = Vi0 + Ui.
Параметры ψ, γ, ν с первого-третьего выходов КСЗ поступают на четвертый-шестой входы БПК4. Параметры Vin = Vi0 + Ui (i = 1, 2, 3) четвертого-шестого выходов КСЗ поступают на четвертый-шестой входы БАС2. В БПК4 по поступившим параметрам формируются составляющие истинной воздушной скорости в осях летательного аппарата
и соответственно составляющие истинной воздушной скорости в осях летательного аппарата ([3], стр. 129)
и параметры функций
Параметры Vi с первого-третьего выходов БПК4 поступают на первый-третий входы БАС2. Параметры fi1, fi2, fi3 с четвертого-двенадцатого выходов БПК4 поступают на первый-девятый входы БЗ7.
На седьмой-девятый входы БАС2 поступают корректирующие сигналы xi.
В БАС2 формируются параметры:
(Vi - Vin - Xi), которые с первого-третьего выходов поступают на первый-третий входы БК5;
Vik = Vi - Xi, которые с четвертого-шестого выходов поступают на первый-третий входы БФК6;
которые с седьмого-девятого выходов поступают на десятый-двенадцатый входы БЗ7. БК5 является блоком интеграторов, в нем формируются корректирующие сигналы Xi = (TP)-1 • (Vi - Vin - xi), которые с первого-третьего выходов БК5 поступают на седьмой-девятый входы БАС2, тогда
Vi-Vin-Xi=TpXi
откуда следует, что, например, при (Δ1fi1+Δ2fi2+Δ3fi3) = Δi = const, Ui0 = const, Ui1 = 0,  - флуктуационной центрированный высокочастотный шум, xi _→ Δi-ui0. , соответственно Vik = Vi - Xi ---> Vi0 + Ui0 = Vin, тогда в БФК6, являющегося блоком интеграторов, формируются координаты местоположения λi = ∫viпdt, которые с первого-третьего выходов БФК6 выдаются потребителям, поступают на первый-третий входы БФВ10 и на тринадцатый-пятнадцатый входы БЗ7.
- флуктуационной центрированный высокочастотный шум, xi _→ Δi-ui0. , соответственно Vik = Vi - Xi ---> Vi0 + Ui0 = Vin, тогда в БФК6, являющегося блоком интеграторов, формируются координаты местоположения λi = ∫viпdt, которые с первого-третьего выходов БФК6 выдаются потребителям, поступают на первый-третий входы БФВ10 и на тринадцатый-пятнадцатый входы БЗ7.
В БЗ7 на элементах запаздывания ([4], Тетельбаум И.М., Шнейдер Ю.Р. "Практика аналогового моделирования динамических систем", Москва, Энергоиздат, 1987 г., стр. 257) при i = 1,; 2; 3; K = 1; 2; 3 формируются:
девять сигналов
yik τ1, τ2, τ3 - постоянные времени запаздывания;
τ1, τ2, τ3 - постоянные времени запаздывания;
десять сигналов fi1(t-τк) ;
девять сигналов fi2(t-τк) ;
девять сигналов fi3(t-τк) ;
девять сигналов λi(t-τк) , которые с первого-сорок пятого выходов БЗ7 поступают на первый-сорок пятый входы БИП8.
По образующим алгебраическую модель погрешностей девяти сигналам yiк(t-τк) ([5] , Кузовков Н.Т., Салчев О.С. "Инерциальная навигация и оптимальная фильтрация", Москва, Машиностроение, 1982 г., стр. 107) в БИП8 формируются сигналы, идентифицирующие погрешности при независимых  :
:

и сигналы
Fj(f,λ) = Fj, Fi0(f,λ) = Fi0, Fi1(f,λ) = Fi1,
которые с первого-восемнадцатого выходов БИП8 поступают на первый-восемнадцатый входы БОФ9, содержащего девять оптимальных фильтров первого порядка ([5] Сейдж Э. "Теория оценивания и ее применение в связи и управлении", Москва, Связь, 1976 г., стр. 288), формирующих оптимальные оценки погрешностей, например, при  - центрованный белый шум,
- центрованный белый шум,


при  aj = const, a0i = const, a1i = const.
aj = const, a0i = const, a1i = const.
Например, при Fj = 1, aj = τ, Cj(t) = (t+τ)-1
при этом дисперсия, определяемая белым шумом  с единичной спектральной плотностью, имеет вид
с единичной спектральной плотностью, имеет вид
Dj = (t+τ)-1 _→ 0.
Оптимальные оценки погрешностей  с первого-третьего выходов БОФ9 поступают на трицадцатый-пятнадцатый входы БАС2, где формируются уточненные параметры
с первого-третьего выходов БОФ9 поступают на трицадцатый-пятнадцатый входы БАС2, где формируются уточненные параметры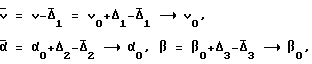
которые с десятого-двенадцатого выходов БАС2 выдаются потребителям.
Оптимальные оценки  с четвертого-девятого выходов БОФ9 поступают на четвертый-девятый входы БФВ10, на первый-третий входы которого поступают сигналы текущих координат λi/ .
с четвертого-девятого выходов БОФ9 поступают на четвертый-девятый входы БФВ10, на первый-третий входы которого поступают сигналы текущих координат λi/ .
В БФВ10 ([5], стр. 105) формируются составляющие скорости ветра
которые с первого-третьего выходов БФВ10 выдаются потребителям.
Таким образом обеспечивается достижение технического результата - повышение точности воздушных сигналов v, α, β и ui - составляющих скорости ветра.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКСНАЯ СИСТЕМА НАВИГАЦИИ | 1992 |
|
RU2023983C1 |
| ПРИЦЕЛЬНО-НАВИГАЦИОННЫЙ КОМПЛЕКС | 1999 |
|
RU2139568C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВЫСОТОЙ ПОЛЕТА | 1994 |
|
RU2081396C1 |
| СИСТЕМА УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 1994 |
|
RU2079108C1 |
| КОМПЛЕКСНАЯ СИСТЕМА НАВИГАЦИОННОГО ОБЕСПЕЧЕНИЯ ЗАХОДА НА ПОСАДКУ | 1992 |
|
RU2042923C1 |
| КОМПЛЕКСНАЯ ИНФОРМАЦИОННАЯ СИСТЕМА НАВИГАЦИИ И НАВЕДЕНИЯ | 1999 |
|
RU2154283C1 |
| КОМПЛЕКСНАЯ ПРИЦЕЛЬНАЯ СИСТЕМА | 1999 |
|
RU2161777C1 |
| КОМПЛЕКС ИНФОРМАЦИОННОГО ОБЕСПЕЧЕНИЯ ГРУППОВОГО ВЗАИМОДЕЙСТВИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1999 |
|
RU2152078C1 |
| КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1992 |
|
RU2115890C1 |
| СИСТЕМА НАВИГАЦИИ | 2000 |
|
RU2168703C1 |
Изобретение может быть использовано в области авиационного приборостроения, в частности для информационного обеспечения навигации, прицеливания и пилотирования летательных аппаратов. В комплексную систему навигации, содержащую систему воздушных сигналов, блок преобразования координат, блок алгебраического суммирования, корректирующую систему, блок коррекции и блок формирования координат, дополнительно введены блок запаздывания, блок идентификации погрешностей, блок оптимальной фильтрации, блок формирования составляющих скорости ветра, обеспечивающие в результате повышения точности определения воздушных параметров (истиной воздушной скорости, углов атаки и скольжения, выделения составляющих скорости ветра), выдаваемых потребителям в систему прицеливания, в систему индикации и в систему управления летательным аппаратом. 2 ил.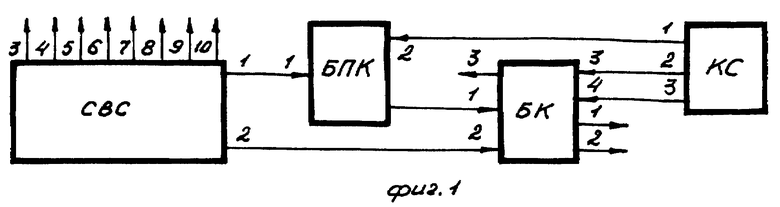
Комплексная система навигации, содержащая последовательно соединенные по первым-третьим выходам-входам систему воздушных сигналов, блок преобразования координат, блок алгебраического суммирования, блок коррекции, подключенную первым-третьим выходами к четвертому-шестому входам блока преобразования координат корректирующую систему, четвертый-шестой выходы которой подключены соответственно к четвертому-шестому входам блока алгебраического суммирования, блок формирования координат, на первый-третий входы которого подключены соответственно четвертый-шестой выходы блока алгебраического суммирования, на седьмой-девятый входы которого подключены соответственно первый-третий выходы блока коррекции, отличающаяся тем, что в нее дополнительно введены подключенный соответственно первым-девятым входами к четвертому-двенадцатому выходам блока преобразования координат блок запаздывания, на десятый-двенадцатый входы которого подключены соответственно седьмой-девятый выходы блока алгебраического суммирования, на десятый-двенадцатый входы которого подключены соответственно первый-третий выходы системы воздушных сигналов, блок идентификации погрешностей, первый-сорок пятый входы которого подключены соответственно к первому-сорок пятому выходам блока запаздывания, тринадцатый-пятнадцатый входы которого подключены к первому-третьему выходам блока формирования координат, подключенный первым-восемнадцатым входами соответственно к первому-восемнадцатому выходам блока идентификации погрешностей блока оптимальной фильтрации, первый-третий выходы которого подключены соответственно к тринадцатому-пятнадцатому входам блока алгебраического суммирования, подключенный первым-третьим входами соответственно к первому-третьему выходам блока формирования координат блока формирования составляющих скорости ветра, четвертый-девятый входы которого подключены к четвертому-девятому выходам блока оптимальной фильтрации.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Помыкаев И.И | |||
| и др | |||
| Навигационные приборы и системы | |||
| - М.: Машиностроение, 1983 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| RU 94017069 A1, 10.01.96 | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 1990 |
|
RU2016383C1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| КОМПЛЕКСНАЯ СИСТЕМА НАВИГАЦИИ | 1992 |
|
RU2023983C1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| RU 2071034 C1, 27.12.96 | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| СТЕНД ДЛЯ ИССЛЕДОВАНИЯ ВЗАИМОДЕЙСТВИЯ КОЛЕСА С РЕЛЬСОМ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА (ВАРИАНТЫ) | 1997 |
|
RU2115908C1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1992 |
|
RU2077028C1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| ПЕРЕДВИЖНОЙ ОПЕРАЦИОННО-ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 1995 |
|
RU2111733C1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| ПРИКРЕПЛЯЕМОЕ УСТРОЙСТВО ДЛЯ БЕСПРОВОДНОГО ДЕТЕКТОРА ВЛАЖНОСТИ ДЛЯ ВПИТЫВАЮЩЕГО ИЗДЕЛИЯ | 2013 |
|
RU2602046C1 |

