Изобретение относится к области авиастроения, в частности к вертолетам, выполняющим обнаружение и поражение наземных, надводных и воздушных целей.
Из известных современных двухместных боевых вертолетов тактического назначения и поддержки сухопутных войск наиболее близким аналогом является описанный в книге [1] Михеева В.Р. "МВЗ им. М.Л. Миля- 50 лет", М., "Любимая книга", 1998 г., стр. 179-202, вертолет МИ-24П, содержащий фюзеляж, двигательную установку, средства механизации, общевертолетное оборудование, систему управления вертолетом и двигательной установкой, систему управления средствами поражения и пассивного противодействия, комплект средств поражения и пассивного противодействия, систему радиоэлектронного противодействия, комплекс пилотажно-навигационных средств, комплекс обзорно-прицельных средств, комплекс средств радиосвязи, систему контроля и регистрации параметров, индикатор летчика на лобовом стекле кабины, органы оперативного управления летчика, органы оперативного управления оператора, бортовую вычислительную систему, включающую вычислительно-логические модули объединенной базы данных, формирования навигационно-пилотажных параметров, формирования параметров целеуказания и применения, формирование параметров отображаемой информации, ввода-вывода-управления информационным обменом. Все узлы вертолета взаимосвязаны по бортовому каналу информационного обмена. Вычислительно-логические модули бортовой вычислительной системы взаимосвязаны по магистрали вычислительно-информационного обмена.
Недостатками ближайшего аналога являются:
- практическая невозможность перепланирования полетного задания при изменившейся боевой обстановке,
- возможность принятия членами экипажа неправильных решений при одновременном ведении боевых действий, например работе летчика по наземной цели, а оператора по воздушной цели,
- отсутствие синтезированной информации типа представления тактической обстановки на фоне аэронавигационной карты местности,
- невозможность отработки членами экипажа полетных заданий непосредственно перед полетом на борту вертолета.
Задачей изобретения является расширение функциональных возможностей двухместного боевого вертолета и, как следствие этого повышения эффективности его применения.
Достигается указанный результат тем, что многофункциональный двухместный боевой вертолет, содержащий взаимосоединенные входами-выходами по бортовому каналу информационного обмена фюзеляж, двигательную установку, средства механизации, общевертолетное оборудование, систему управления вертолетом и двигательной установкой, систему управления средствами поражения и пассивного противодействия, комплект средств поражения и пассивного противодействия, систему радиоэлектронного противодействия, комплекс навигационно-пилотажных средств, комплекс обзорно-прицельных средств, комплекс средств радиосвязи, систему контроля и регистрации параметров, индикатор летчика на лобовом стекле кабины, органы оперативного управления летчика, органы оперативного управления оператора, бортовую вычислительную систему, включающую взаимосоединенные входами-выходами по магистрали вычислительно-информационного обмена вычислительно-логические модули объединенной базы данных, формирования навигационно-пилотажных параметров, формирования параметров целеуказания и применения, формирования параметров отображаемой информации, ввода-вывода-управления информационным обменом, другой вход-выход которого является входом-выходом бортовой вычислительной системы, дополнительно снабжен подключенными входами-выходами к бортовому каналу информационного обмена блоком формирования телевизионных сигналов, внутрикабинной камерой телевизионного обзора, многофункциональным индикатором летчика, многофункциональным пультом оператора, многофункциональным индикатором оператора и, введенными в состав бортовой вычислительной системы, подключенными входами-выходами к магистрали вычислительно-информационного обмена, вычислительно-логическими модулями оперативного планирования полетных заданий, диагностического контроля критических состояний вертолета, формирования кадров обобщенной синтезированной информации, координированного ведения боевых действий, предполетного тренажа членов экипажа.
На чертеже представлена блок-схема многофункционального двухместного боевого вертолета, где обозначено:
1 - фюзеляж, двигательная установка, средства механизации ФДУМ,
2 - общевертолетное оборудование ОВО,
3 - система управления вертолетом и двигательной установкой СУВД,
4 - система управления средствами поражения и пассивного противодействия СУПС,
5 - комплект средств поражения и пассивного противодействия КСП,
6 - система радиоэлектронного противодействия СРЭП,
7 - комплекс навигационно-пилотажных средств КНПС,
8 - комплекс обзорно-прицельных средств КОПС,
9 - блок формирования телевизионных сигналов БФТС,
10 - внутрикабинная камера телевизионного обзора ВКТО,
11 - комплекс средств радиосвязи КСРС,
12 - система контроля и регистрации параметров СКРП,
13 - многофункциональный индикатор летчика МФИЛ,
14 - индикатор летчика на лобовом стекле кабины ИЛЛС,
15 - органы оперативного управления летчика ООУЛ,
16 - органы оперативного управления оператора ООУО,
17 - многофункциональный пульт оператора МФПО,
18 - многофункциональный индикатор оператора МФИО,
19 - бортовой канал информационного обмена БКИО,
20 - бортовая вычислительная система БВС 20,
21 - вычислительно-логический модуль ВЛМ объединенной базы данных ОБД,
22 - ВЛМ формирования навигационно-пилотажных параметров ФНПП,
23 - ВЛМ ввода-вывода-управления информационным обменом ВВУО,
24 - ВЛМ формирования параметров целеуказания и применения ФПЦП,
25 - ВЛМ формирования параметров отображаемой информации ФОИ,
26 - ВЛМ оперативного планирования полетных заданий ОППЗ,
27 - ВЛМ диагностического контроля критических состояний вертолета ДКСВ,
28 - ВЛМ формирования кадров обобщенной синтезированной информации ФКСИ,
29 - ВЛМ координированного ведения боевых действий КВБД,
30 - ВЛМ предполетного тренажа членов экипажа ПТЧЭ,
31 - магистраль вычислительно-информационного обмена МВИО,
Техническое выполнение ФДУМ 1, ОВО 2, СУВД 3, СУСП 4, КСП 5, СРЭП 6, КНПС 7, КОПС 8, КСРС 11, СКРП 12, ИЛЛС 14, ООУЛ 15, ООУО 16, БКИО 19 представлено в [1] на стр. 200-201.
Техническое выполнение БВС 20 на основе вычислительно-логических модулей приведено, например, в книге [2], Преснухин Л.Н., Нестеров В.П. "Цифровые вычислительные машины", М., Высшая школа, 1981 г., стр. 28-33.
ВЛМ ФНПП 22, ФПЦП 24, ФОИ 25, ОППЗ 26, ДКСВ 27, ФКСИ 28, КВБД 29, ПТЧЭ 30 реализуются на стандартных вычислительных элементах по стандартным вычислительным схемам на основе процессора (П) и запоминающего устройства (ЗУ) с выходом на МВИО 31 ([2] , стр. 31), при этом П и ЗУ могут быть частью единого процессора и соответственно единого запоминающего устройства.
ОБД 21 реализуется на основе перепрограммируемого долговременного запоминающего устройства ([2], стр. 298).
Примеры технической реализации ВВУО 23 и МВИО 31 приведены в [2] на стр. 399-405, стр. 472-479.
БКИО 19 ([1], стр. 200-201) реализован на бортовом жгуте, включающем электрические (аналоговые, дискретные и кодированные сигналы) связи взаимодействующего оборудования и электромеханические взаимосвязи между ФДУМ 1, СУВД 3, КСП 5.
ФДУМ 1, ОВО 2, СУВД 3, СУСП 4, КСП 5, СРЭП 6, КНПС 7, КОПС 8, КСРС 11, СКРП 12, ИЛЛС 14, ООУЛ 15, ООУО 16, БВС 20 (в составе вычислительно-логических модулей ОБД 21, ФНПП 22, ВВУО 23, ФПЦП 24, ФОИ 25 взаимосоединенных по МВИО 31) во взаимодействии по БКИО 31, как в ближайшем аналоге, обеспечивается пилотируемый экипажем и автоматический полет, обнаружение, сопровождение и поражение наземных, надводных и воздушных целей, организация активного и пассивного противодействия, при этом осуществляется контроль и регистрация параметров полета и связь с взаимодействующими летательными аппаратами в группе, воздушными и наземными пунктами управления боевыми действиями.
ФДУМ 1 включает конструкцию вертолета с двигательной установкой и средствами механизации (несущий винт, рулевой винт), образующие собственно летательный аппарат с установленными на нем системами, обеспечивающими его функционирование:
- ОВО 2, включающее шасси, топливную систему, систему электроснабжения, противопожарную систему, противообледенительную систему, гидравлическую систему, систему вентиляции, светотехническое оборудование;
- ООУЛ 15, ООУО 16, включающие средства оперативного управления вертолетом (педали управления вертолетом и ручки, снабженные манипуляторами наведения и гашетками применения средств поражения и пассивного противодействия), индикаторы для осуществления вертолетовождения (индикатор командно-пилотажный ИКП, прибор навигационный плановый ПНП, указатель крена и тангажа УКТ); в ООУО 16 входит также пульт управления наведением (ПУН) средств поражения с телекомандным наведением;
- КНПС 7 включает физически разнородные (инерциальные, гироскопические, спутниковые, радиотехнические) системы и датчики состояния вертолета и окружающей среды, формирующие и выдающие потребителям сигналы координат местоположения вертолета, составляющие путевой и воздушной скорости, составляющие ускорений и перегрузок, углы курса, крена, тангажа, атаки и скольжения;
- СУВД 3 по данным, полученным от взаимодействующего оборудования в режиме ручного, полуавтоматического и автоматического управления, осуществляет формирование сигналов управления на исполнительные устройства средств механизации ФДУМ 1.
КСП 5 включает средства поражения - пушечные установки, управляемое и неуправляемое ракетное вооружение класса "воздух - воздух" и "воздух - поверхность"; управляемое и неуправляемое бомбардировочное вооружение, а также средства пассивного противодействия - ложные тепловые и радиолокационные цели.
СУСП 4 обеспечивает формирование команд целеуказания, команд на подготовку и пуск средств поражения и пассивного противодействия из состава КСП 5, выдачу во взаимодействующее оборудование команд о состоянии средств КСП 5.
СРЭП 6 обеспечивает фиксацию фактов обнаружения вертолета радиолокационными (наземными и воздушными) станциями противника, пеленгацию радиоизлучающих целей, формирование активного радиолокационного помехового излучения в направлениях лоцирующих станций противника и радиоизлучающих целей.
КОПС 8 включает физически разнородные (тепловизионные, радиолокационные, визирные - нашлемная система целеуказания, очки ночного видения) системы обзора окружающего пространства, фиксацию, идентификацию и сопровождение воздушных, надводных и наземных неподвижных и подвижных целей, формирующие параметры относительного движения вертолета относительно целей, характеристики идентифицированных целей, сигналы которых с входа-выхода КОПС 8 по БКИО 19 поступают на входы-выходы взаимодействующего оборудования.
КСРС 11 включает радиоустройства, обеспечивающие двухстороннюю радиотелефонную связь между членами экипажа, телекодовую связь с взаимодействующими в группе летательными аппаратами, с наземными и воздушными пунктами управления и наведения, с запущенными по целям средствами поражения, оснащенными телекомандной системой наведения; через вход-выход КСРС 11 осуществляется взаимодействие с бортовым оборудованием через БКИО 19.
СКРП 12 включает информационные носители для регистрации в текущем времени параметров состояния вертолета и всего бортового оборудования, взаимосоединенного через БКИО 15 с входом-выходом СКРП 12.
ИИЛС 14 является стандартным авиационным коллиматорным индикатором отображения на полупрозрачный экран навигационно-пилотажной, прицельной и тактической информации на фоне окружающего пространства, видимого через лобовое стекло кабины и полупрозрачный экран.
Дополнительно введенная ВКТО 10 является стандартной видеокамерой, фиксирующей телевизионное изображение закабинного пространства на фоне информационных кадров ИЛЛС 14. Телевизионный сигнал с входа-выхода ВКТО 10 через БКИО 19 поступает на вход-выход СКРП 12 для регистрации и последующего просмотра и на вход-выход БФТС 9.
Дополнительно введенный БФТС 9 осуществляет прием телевизионных сигналов от средств КОПС 8, оснащенных телевизионным выходом, от ВКТО 10, от средств КСП 5 (через КСРС 11), оснащенных телевизионным выходом, приведение всех сигналов к единому времени, нормирование этих сигналов по уровням напряжений и их преобразование к форме единого цифрового телевизионного сигнала, который с входа-выхода БФТС 9 через БКИО 19 поступает во взаимодействующее оборудование.
Дополнительно введенные МФИЛ 13 и МФИО 18 являются многофункциональными индикаторами (МФИ) на основе жидкокристаллических экранов (ЖКЭ). Отображение монохромной и цветной знакографической, телевизионной, картографической и смешанной информации в едином времени с текущей ситуацией осуществляется на экранах МФИ 13, МФИ 18 по сигналам, поступающим на входы-выходы через БКИО 19.
МФИЛ 13 и МФИО 18 функционируют в одинаковых и различных режимах индикации:
- индикатор тактической обстановки,
- индикатор вертикальной обстановки,
- индикатор обзорно-прицельных средств,
- индикатор комплексной информационной сигнализации,
- индикатор камеры телевизионного обзора.
Обрамляющие ЖКЭ многофункциональные кнопки-клавиши автоматически назначаются (с подсветом названий) по режимам индикации и служат для ручного выбора индикационных подрежимов работы вертолета (подготовке, взлет, висение, маршрутный полет, боевые режимы, посадка) и индикационных подрежимов работы оборудования из состава КОПС 8.
Дополнительно введенный МФПО 17 содержит:
- режимные гравированные кнопки, соответствующие режимам работы вертолета (ПДГ - подготовка, НАВ - навигация, БР - боевой режим и др.) и режимам работы бортового оборудования (КОПС - комплекс обзорно-прицельных средств, СРЭП - система радиоэлектронного противодействия и др.), по включению которых пульт становится средством управления соответствующим режимом работы вертолета или оборудования,
- гравированные кнопки цифробуквенных символов для ввода исходных данных при подготовке и в полете и формирования исполнительных команд (ВВД - ввод, КНТ - самоконтроль и др.).
- информационное табло, обрамленное многофункциональными безымянными кнопками, соответствующими составляющим режимов (подрежимам) работы вертолета и бортового оборудования, зафиксированным режимными гравированными кнопками; информационное табло разделено на части, соответствующие расположенной справа или слева многофункциональной кнопке, название назначения которой подсвечивается на данной части информационного табло,
- табло подсказок, осуществляющее индикацию выбранного режима, зафиксированного гравированной кнопкой, и подсказок оператору при работе с пультом, например, ВВЕДИ ППМ - введи промежуточный пункт маршрута и др. МФПО 17 взаимодействует с бортовым оборудованием через вход-выход по БКИО 19.
БВС 20 является современным быстродействующим цифровым вычислителем, обеспечивающим прием и преобразование поступивших сигналов, проведение вычислительных процедур, преобразование и выдачу сигналов потребителям по БКИО 19 практически в реальном времени. БВС 20 содержит вычислительно-логические модули:
- ВЛМ ВВУО 23 осуществляет по одному входу-выходу прием, преобразование и передачу данных по БКИО 19, другой вход-выход подключен к МВИО 31, обеспечивающей вычислительно-информационный обмен между всеми ВЛМ БВС 20,
- ВЛМ ОБД 21 обеспечивает долговременное хранение исходных данных маршрута полета, состава КСП 5, характеристик средств поражения и противодействия, данных аэронавигационной карты района действий вертолета, юстировочных характеристик бортового оборудования, цифробуквенных и графических символов обобщенной информации и других данных, необходимых для функционирования вычислительного процесса в БВС 20 и функционирования взаимодействующего оборудования,
- ВЛМ ФНПП 28 ([3] , Помыкаев И.П., Селезнев В.П., Дмитроченко Л.А. "Навигационные приборы и системы", М., Машиностроение, 1983, стр. 403-418) осуществляет комплексную обработку навигационно-пилотажной информации от КНПС 7, КОПС 8 с исходными данными от ОБД 27 и формирует пилотажно-навигационные параметры полета от предполетной подготовки до посадки, которые с входа-выхода ФНПП 28 через МВИО 31 поступают во взаимодействующие ВЛМ БВС 10 и соответственно через ВВУО 23, БКИО 19 на входы-выходы взаимодействующего бортового оборудования, в частности в СУВД 3 для управления полетом,
- ВЛМ ФПЦП 24 ([4], Гришутин В.Г. "Лекции по авиационным системам стрельбы", Киев, КВВАИУ, 1980 г., стр. 114-194) осуществляет комплексную обработку прицельной информации от КОПС 8, СРЭП 6, КНПС 7 и формирует параметры целеуказания и команды на применение всех средств КСП 5 и управления вертолетом, которые с входа-выхода ФПЦП 24 через МВИО 31 поступают во взаимодействующие ВЛМ БВС 10 и соответственно через ВВУО 23, БКИО 19 на входы-выходы взаимодействующего бортового оборудования, в частности в СУВД 3 для управления полетом,
- ВЛМ ФОИ 25 во взаимосвязи с ОБД 21, ФНПП 22, ФНЦП 24 обеспечивает формирование параметров отображаемой информации ([4], стр.353-356) на индикаторах (ИКП, ПНП, УКТ) в составе ООУЛ 15 и ООУО 16 для осуществления навигации и пилотирования вертолета в режиме ручного управления и на ИЛЛС 14 для наведения вертолета на цель в режиме ручного управления.
В процессе полета, например, с наземного пункта управления поступает команда переназначения цели, сигналы координат новой цели и ее характеристики с наземного пункта управления через КСРС 11, БКИО 19, ВВУО 23 поступают в ОБД 21. В БВС 20 дополнительно введен ВЛМ ОППЗ 26, реализующий алгоритм формирования полетного задания:
- по данным новой цели назначаются из имеющихся в наличии средства поражения и пассивного противодействия из состава КСП 5 и порядок их применения,
- формируется оптимальная (например, по минимуму расхода топлива) траектория полета с назначением координат промежуточных пунктов маршрута,
- по характеристикам новой цели назначается ведущее обзорно-прицельное средство (или набор этих средств) из состава КОПС 8 и средства активного противодействия из состава СРЭП 6.
Сформированные параметры полетного задания с входа-выхода ОППЗ 26 через МВИО 31 передаются в ОБД 21 для дальнейшего использования при выполнении полета и через ВВУО 23, БКИО 19 параметры нового полетного задания передаются в СКРП 12 для регистрации и в КСРС 11 для передачи на наземные пункты управления для контроля полета.
В БВС 20 дополнительно введен ВЛМ ФКСИ 28, осуществляющий во взаимодействии с другими ВЛМ БВС 20 формирование кадров обобщенной функциональной отображаемой информации, совмещенной с телевизионной информацией и информацией аэронавигационной карты.
Сформированные кадры синтезированных изображений в необходимых комбинациях и форматах, с входа-выхода ФКСИ 28 через МВИО 31, ВВУО 23, БКИО 19 передаются на входы-выходы МФИЛ 13, МФИО 18 для отображения в соответствии с заданными режимами и подрежимами индикации. Сформированные кадры синтезированных изображений во времени едином с текущей ситуацией представляются экипажу, обеспечивая его высокую ситуационную осведомленность в быстроменяющихся и опасных боевых режимах.
В ВВС 20 дополнительно введен ВЛМ КВБД 29, в котором во взаимосвязи с другими ВЛМ БВС 10 и бортовым оборудованием через ВВУО 23, БКИО 19 на основе оптимизации функционала минимума потерь и максимума поражения осуществляется:
- анализ целевой обстановки и ранжирование целей по степеням опасности и важности,
- распределение целей и средств их лоцирующих и поражающих для работы летчику и оператору,
- распределение средств КСП 5 и выбор порядка их применения по выбранным целям,
- распределение средств СРЭП 6 и выбор порядка их применения,
- назначение маневров и способов их выполнения на различных этапах боевых режимов,
- назначение режимов и подрежимов работы МФИЛ 13, МФИО 18.
Сформированные в КВБД 29 команды по МВИО 31 поступают в ФКСИ 28 для введения в индикационные кадры, представляемые членам экипажа на МФИЛ 13 и МФИО 18.
Например, при обнаружении и атаке визуально видимой важной наземной цели ВНЦ (танковая колония противника) средствами КОПС 8 или СРЭП 6 обнаружена опасная воздушная цель ОВЦ (сопровождающий таковую колонну вертолет противника) в КВБД 29 во взаимодействии с бортовым оборудованием и другими ВЛМ БВС 20 осуществляется:
- назначение приоритета ВНЦ (обязательное поражение) над ОВЦ (организация обороны и последующая атака),
- летчику назначается - работа по ВНЦ с сопровождением по ИЛЛС 14, средства поражения - ракеты "воздух - поверхность", бомбардировочное, пушечное вооружение и порядок его применения, управление вертолетом с выполнением маневра оптимального выхода на ВНЦ в режиме ручного или автоматического управления, МФИЛ 13 переводится в режим индикатора вертикальной обстановки,
- оператору назначается работа по ОВЦ с сопровождением по тепловизионной системе (ТС) из состава КОПС 8, МФИО 18 переводится в режим индикатора КОПС 8 (подрежим ТС), применение ракеты "воздух - воздух" с телекомандной системой наведения, применение ложных тепловых целей, применение станции активного помехового радиолокационного излучения из состава СРЭП 6.
Во взаимодействии летчика и оператора с летательным аппаратом и бортовым оборудованием осуществляется атака и применение средств поражения по ВНЦ координировано с организацией обороны и применением средств поражения по ОВЦ.
Таким образом, в пространственно-временном координированном взаимодействии вертолет выполняет штурмовые, бомбардировочные и истребительные функции и функции постановщика помех.
После поражения ВНЦ возможен перевод МФИЛ 13 в режим (подрежим ТС) индикатора КОПС 8, летчик выполняет ручное управление вертолетом посредством ООУЛ 15, осуществляя наведение по МФИЛ 13, а оператор посредством ПУН из состава ООУО 16, МФИО 18 осуществляет наведение и пуск ракет "воздух - воздух" с телекомандной системой наведения по ОВЦ с применением ложных (тепловых и радиолокационных) целей и средств СРЭП 6.
Таким образом, в пространственно-временном координированном взаимодействии вертолет выполняет истребительные функции и функции постановщика помех, что существенно расширяет его функциональные возможности и повышает эффективность его применения.
В БВС 20 дополнительно введен ВЛМ ДКСВ 27, в котором во взаимодействии с ОБД 21 и бортовым оборудованием формируется функционал F(П) критических состояний вертолета в пространстве параметров П (составляющие скорости и перегрузок, высота, углы крена, тангажа, атаки и скольжения и др.) состояния, при приближении F(П) к опасному состоянию F0 (хранится в ОБД 21) в ДКСВ 27 формируется сигнал приближения к опасному состоянию, которой передается в ФКСИ 28 для замешивания в информационные кадры МФИЛ 13, МФИО 18 с текстовым сопровождением принятия решения. Например, при приближении к опасной высоте формируется сигнал опасной высоты, который с символом Ноп и текстовым сопровождением "ОПАСНАЯ ВЫСОТА-РУЧН. ПОДЪЕМ" представляется на информационных кадрах МФИЛ 13 и МФИО 18 для выполнения летчиком увода вертолета от опасной высоты в режиме ручного управления. При текущей высоте Н<Ноп увод вертолета от опасной высоты может осуществляться в режиме автоматического управления с текстовым сопровождением "ОПАСНАЯ ВЫСОТА-АВТ.УВОД".
Таким образом, в опасных ситуациях, особенно связанных с боевым применением или организацией обороны, летательный аппарат не входит в пространство параметров критических состояний.
При проведении предполетного тренажа членов экипажа, переход который осуществляется подачей команд с многофункциональных кнопок-клавиш МФИЛ 13, МФИО 18, переводящихся в подрежим подготовки (ПРП ТР - предполетный тренаж), взаимодействующее бортовое оборудование также переводится в режим ПРП ТР; в БВС 20 дополнительно введен ВЛМ ПТЧЭ 30, в котором по данным ОБД 21 в соответствии с введенным полетным заданием формируются модели движения вертолета на всех этапах полета вертолета (от взлета до возврата и посадки) и модели движения и характеристики запрограммированных целей и средств их поражения. Во взаимодействии ВЛМ ПТЧЭ 30 и других ВЛМ БВС 20 и бортового оборудования осуществляется имитационный полет по запрограммированному маршруту с подыгрышем обнаружения целей, применения средств поражения и пассивного противодействия, результаты тренажа фиксируются на СКРП 12, а члены экипажа контролируют свои действия и действия друг друга; при этом через КСРС 11 процесс и результаты могут одновременно транслироваться на наземные пункты управления для контроля процесса подготовки и правильности выполнения полетного задания членами экипажа. Таким образом, многофункциональный вертолет выполняет функции учебно-тренировочного класса и учебно-тренировочного вертолета, что значительно повышает эффективность его применения.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОФУНКЦИОНАЛЬНЫЙ ДВУХМЕСТНЫЙ БОЕВОЙ ВЕРТОЛЕТ КРУГЛОСУТОЧНОГО ДЕЙСТВИЯ, КОМПЛЕКС РАДИОЭЛЕКТРОННОГО ОБОРУДОВАНИЯ, ИСПОЛЬЗУЕМЫЙ НА ДАННОМ ВЕРТОЛЕТЕ | 2008 |
|
RU2360836C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ДВУХМЕСТНЫЙ ВЫСОКОМАНЕВРЕННЫЙ САМОЛЕТ ТАКТИЧЕСКОГО НАЗНАЧЕНИЯ | 2001 |
|
RU2184683C1 |
| ПРИЦЕЛЬНО-НАВИГАЦИОННЫЙ КОМПЛЕКС ОБОРУДОВАНИЯ МНОГОФУНКЦИОНАЛЬНОГО САМОЛЕТА | 2005 |
|
RU2282156C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ТЯЖЕЛЫЙ ТРАНСПОРТНЫЙ ВЕРТОЛЕТ КРУГЛОСУТОЧНОГО ДЕЙСТВИЯ, КОМПЛЕКС БОРТОВОГО РАДИОЭЛЕКТРОННОГО ОБОРУДОВАНИЯ, ИСПОЛЬЗУЕМЫЙ НА ДАННОМ ВЕРТОЛЕТЕ | 2013 |
|
RU2524276C1 |
| ПРИЦЕЛЬНО-НАВИГАЦИОННЫЙ КОМПЛЕКС МНОГОФУНКЦИОНАЛЬНОГО САМОЛЕТА | 2004 |
|
RU2263881C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ САМОЛЕТ ТАКТИЧЕСКОГО НАЗНАЧЕНИЯ | 2003 |
|
RU2226166C1 |
| ПРИЦЕЛЬНО-НАВИГАЦИОННЫЙ КОМПЛЕКС МНОГОФУНКЦИОНАЛЬНОГО САМОЛЕТА АВИАНОСНОГО И НАЗЕМНОГО БАЗИРОВАНИЯ | 2005 |
|
RU2276328C1 |
| Способ управления вооружением многофункциональных самолетов тактического назначения и система для его осуществления | 2019 |
|
RU2725928C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ САМОЛЕТ | 2000 |
|
RU2174932C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ САМОЛЕТ | 2003 |
|
RU2231478C1 |
Изобретение относится к технике обнаружения и поражения воздушных, надводных и наземных неподвижных и подвижных целей с боевого вертолета. Пилотажно-навигационное оборудование, средства поражения и противодействия, а также бортовая вычислительная система взаимно соединены входами-выходами по бортовому каналу информационного обмена. Вычислительная система включает вычислительно-логические модули, соединенные входами-выходами по магистрали вычислительно-информационного обмена. Вертолет дополнительно снабжен блоком формирования телевизионных сигналов, внутрикабинной камерой телевизионного обзора, многофункциональным индикатором летчика, мноногофункциональным пультом оператора и многофункциональным индикатором оператора. В вычислительную систему дополнительно введены модули оперативного планирования полетных заданий, диагностического контроля критических состояний оборудования вертолета, формирования кадров обобщенной синтезированной информации и координированного ведения боевых действий, предполетного тренажа членов экипажа. Вертолет характеризуется расширенными функциональными возможностями и повышенной эффективностью применения. 1 ил.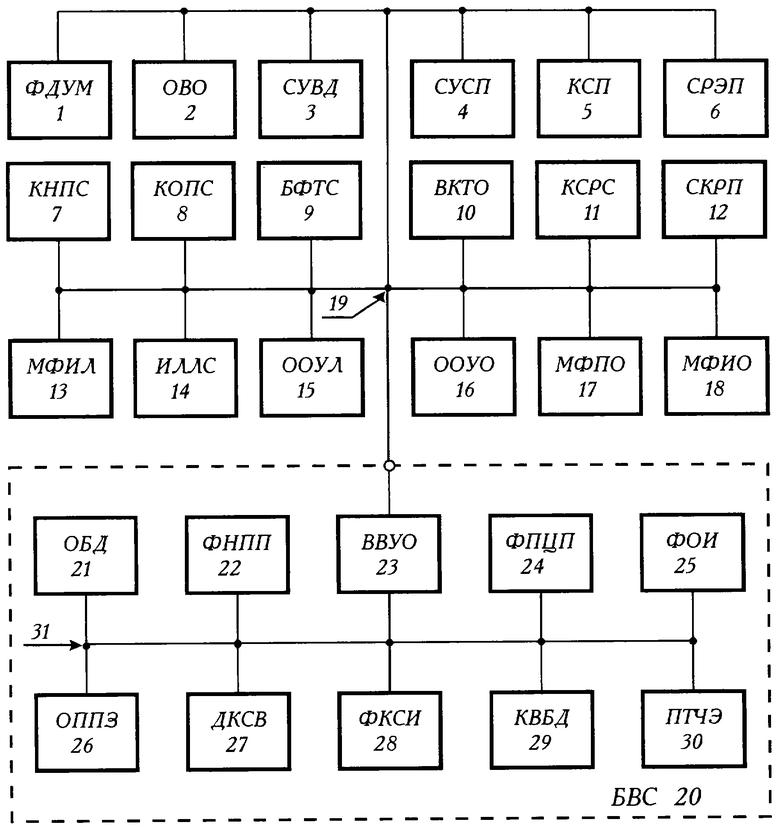
Многофункциональный двухместный боевой вертолет, содержащий взаимосоединенные входами-выходами по бортовому каналу информационного обмена фюзеляж, двигательную установку, средства механизации, общевертолетное оборудование, систему управления вертолетом и двигательной установкой, систему управления средствами поражения и пассивного противодействия, комплект средств поражения и пассивного противодействия, систему радиоэлектронного противодействия, комплекс навигационно-пилотажных средств, комплекс обзорно-прицельных средств, комплекс средств радиосвязи, систему контроля и регистрации параметров, индикатор летчика на лобовом стекле кабины, органы оперативного управления летчика, органы оперативного управления оператора, бортовую вычислительную систему, включающую соединенные входами-выходами по магистрали вычислительно-информационного обмена вычислительно-логические модули объединенной базы данных, формирования навигационно-пилотажных параметров, формирования параметров целеуказания и применения, формирования параметров отображаемой информации, ввода-вывода управления информационным обменом, другой вход-выход которого является входом-выходом бортовой вычислительной системы, отличающийся тем, что он дополнительно снабжен подключенными входами-выходами к бортовому каналу информационного обмена блоком формирования телевизионных сигналов, внутрикабинной камерой телевизионного обзора, многофункциональным индикатором летчика, многофункциональным пультом оператора, многофункциональным индикатором оператора и введенными в состав бортовой вычислительной системы, подключенными входами-выходами к магистрали вычислительно-информационного обмена вычислительно-логическими модулями оперативного планирования полетных заданий, диагностического контроля критических состояний оборудования вертолета, формирования кадров обобщенной синтезированной информации, координированного ведения боевых действий, предполетного тренажа членов экипажа.
| МИХЕЕВ В.Р | |||
| МВЗ им | |||
| М.Л | |||
| Устройство для выпрямления многофазного тока | 1923 |
|
SU50A1 |
| - М.: Любимая книга, 1998, с.179-202 | |||
| ПИЛОТАЖНО-НАВИГАЦИОННЫЙ КОМПЛЕКС | 1990 |
|
SU1797383A1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС ЛЕТАТЕЛЬНОГО АППАРАТА | 2000 |
|
RU2170409C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС ЛЕТАТЕЛЬНОГО АППАРАТА | 2000 |
|
RU2170410C1 |

