Область техники
Изобретение относится к области радиотехники, в частности к способам и устройствам поиска широкополосного сигнала в системах связи с кодовым разделением каналов (CDMA).
Уровень техники
Известные системы сотовой связи CDMA превосходят другие системы по таким параметрам, как емкость, частотное планирование, качество связи, скрытность и защита от несанкционированного доступа, устойчивость против помех.
Одной из наиболее серьезных проблем при разработке систем связи CDMA является необходимость точной синхронизации между входным и опорным сигналами. На первом этапе установления синхронизации, как правило, проводится поиск, в результате которого делается предварительная оценка параметров синхронизации (фазы PN кода, частоты и др. ) принимаемого сигнала. При этом именно на поиск затрачиваются значительные временные и аппаратные ресурсы. При поиске проверяются гипотезы о наличии сигнала с тем или иным набором параметров синхронизации. При этом вычисляются значения оценки корреляции входного и опорного сигналов при всех возможных значениях параметров синхронизации (фазы PN кода, частоты) из некоторого, заранее известного, множества. Это множество называется областью неопределенности поиска. Решение принимается по результатам сравнения с порогом вычисленных значений оценки корреляции.
Существуют различные способы, направленные на сокращение времени поиска. К ним, прежде всего, можно отнести параллельную обработку сигнала несколькими каналами поиска (см. "Performance Evaluation of Parallel Acquisition in Cellular DS/CDMA Reverse Link", Bub-Joo Kang and others: Signal Processing Section, Mobile Communication Research Division, Korea. / Proc. November, 1995, pp. 47-51) [1] и использование согласованных фильтров (см. "Simple Schemes for Parallel Acquisition of Spreading Sequences in DS/SS Systems", Meera Srinivasan, Dilip. V. Sarawatc/ IEEE TRANSACTION ON VEHICULAR TECHNOLOGY, VOL. 45, 3, August 1996, pp. 593-598) [2] . Различные комбинации этих способов описаны в следующих источниках информации: "An Improved Hybrid PN Code Acquisition for CDMA Personal Wireless Communications", Weihua Zhang. /Proc. PIMRC'95, pp. 995-999 [3] и "A Unified Approach to Serial Search Spread Spectrum Code Acquisition", A. Polidoros and S. L Veber Parts I, II IEEE Trans. Commun. , Vol. COM-32, pp. 542-560, May 1984 [4] .
Применение перечисленных выше способов и алгоритмов их реализации связано с увеличением объема используемого оборудования и повышением требований к его быстродействию. Это не всегда приемлемо, например, в условиях сотовой системы радиосвязи с кодовым разделением каналов, в частности на мобильной станции (МС), где накладываются ограничения на объем (размер) оборудования и потребляемую мощность, которая имеет прямую зависимость от быстродействия.
В этих условиях предпочтительны методы поиска, основанные на последовательном сканировании области неопределенности параметров сигнала.
При последовательном сканировании области часто применяются эффективные способы сокращения времени поиска, основанные на применении ускоренных процедур принятия решения, среди которых наиболее распространенными являются двухэтапные и последовательные процедуры, например многоканальное устройство с двухэтапной процедурой в каждом канале и случайным моментом останова (см. "Устройство поиска шумоподобного сигнала". Авторское свидетельство SU. 1356229, В. Н. Осьмак, С. Н. Смирнов, А. Н. Ступин, 1973 г. ) [6] .
Максимальный выигрыш обеспечивает последовательная процедура. Однако последовательная процедура требует очень высокой точности при формировании порогов. Кроме того, последовательная процедура приводит к значительным усложнениям при ее применении в сочетании со стратегией выбора максимума. Двухэтапная процедура дает лишь незначительный выигрыш во времени поиска, не более чем в 1,5-2 раза.
Существуют различные способы формирования порога. Иногда с целью формирования порога используют уровень корреляции входного сигнала с каким-либо ортогональным опорным сигналом. Для этого необходим дополнительный канал корреляционной обработки (см. Jin Young Kim, Jae Hong Lee. "Perfomance of Matched-Filter Acquisition for a DS/SSMA System in a Frequency-Selective Fading Channel", VTC'96, April 28 - May 1, 1996, Atlanta, GA USA/ 0-7803-3157-5/96) [9] . Это приводит к значительному усложнению схемы, что недопустимо в условиях мобильной станции.
Можно сформировать пороги пропорционально усредненной величине оценки корреляции для множества позиций области неопределенности (см. US Patent N 5818868 DS/SS Receiver Including Code Acquisition and Detection using an Autoadaptive Threshold (6.10.98)) [10] .
Однако для этого необходимо провести полный цикл сканирования. В многоэтапной процедуре величина порога необходима при принятии решения на каждой позиции области неопределенности, то есть с самого начала цикла сканирования. Это приводит к значительному усложнению схемы, что недопустимо в условиях мобильной станции.
Наиболее близким техническим решением (прототипом) к заявляемому способу поиска широкополосного сигнала является способ поиска сигнала и алгоритм его реализации, основанные на многоэтапной процедуре принятия решения, описанные в "CDMA Principles of Spread Spectrum Communication", Andrew J. Viterbi, Addison-Wesley Communication Series. 1995, p. 58-59 [7] .
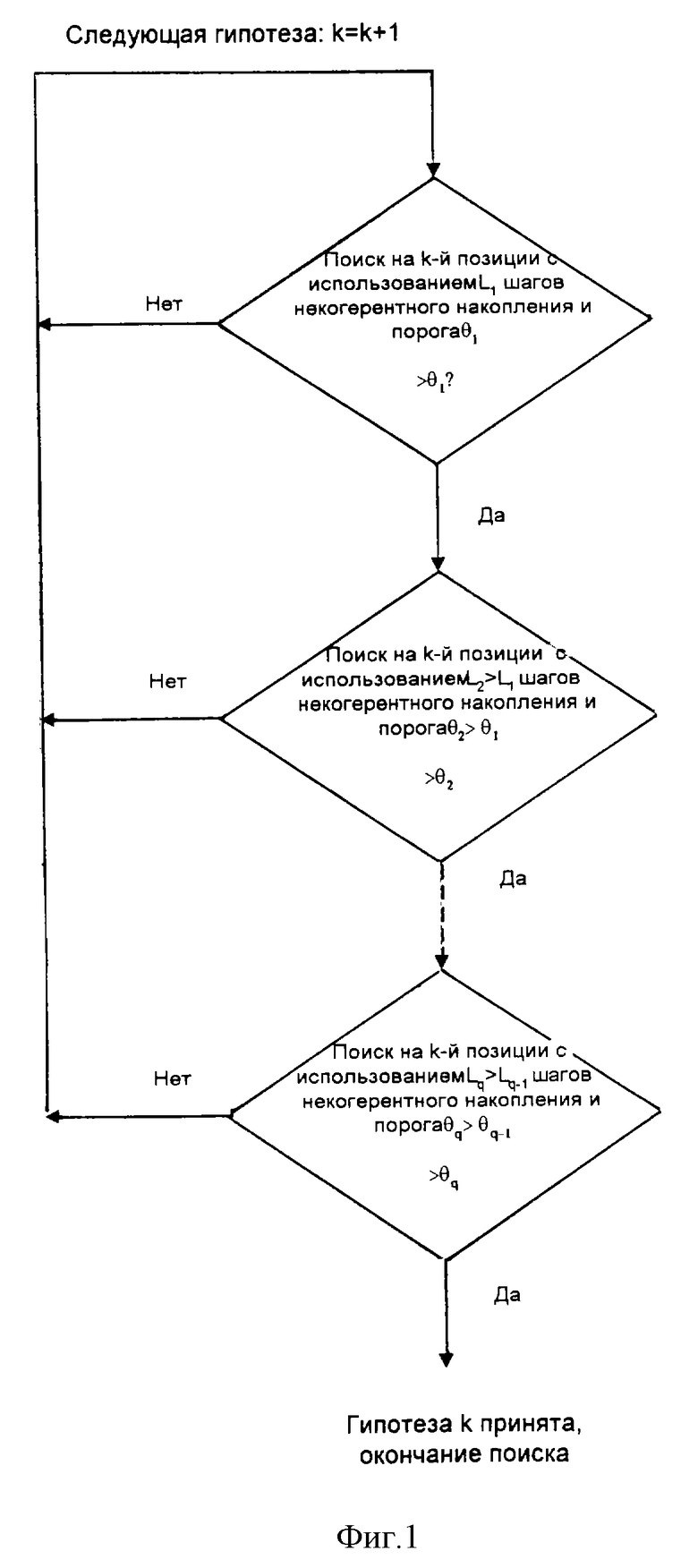
Способ и алгоритм его реализации по Витерби заключаются в следующем. Осуществляют последовательный поиск по области неопределенности, каждая позиция которой соответствует некоторому набору неизвестных параметров синхронизации сигнала. Поиск сигнала на каждой позиции области неопределенности осуществляют последовательно в q этапов, при этом формируют значения порогов θ1...θq для каждого этапа поиска. Формируют опорный сигнал, представляющий копию входного сигнала, со значениями параметров, соответствующими текущей позиции области неопределенности.
Вычисляют корреляцию между входным и опорным сигналами, образуя величины оценок корреляции Y на Mi последовательных интервалах когерентности сигнала, соответствующих текущему i-му этапу поиска. Формируют решающую величину Zi текущего i-го этапа поиска как сумму оценок корреляции Y, полученных на текущем и всех предыдущих этапах поиска. Сформированную решающую величину Zi сравнивают с заданной величиной порога текущего этапа поиска θi. По результатам сравнения принимают решение о наличии или отсутствии сигнала следующим образом: решение об отсутствии сигнала со значениями параметров, соответствующими текущей позиции области неопределенности, принимают на любом этапе поиска, если решающая величина на текущем этапе поиска Zi не превышает порог Zi< θi, а i < q, где i - номер текущего этапа поиска), после чего переходят к поиску на следующей позиции области неопределенности; решение о наличии сигнала со значениями параметров, соответствующими текущей позиции области неопределенности, принимают на последнем этапе поиска, если решающая величина превышает величину порога θq.
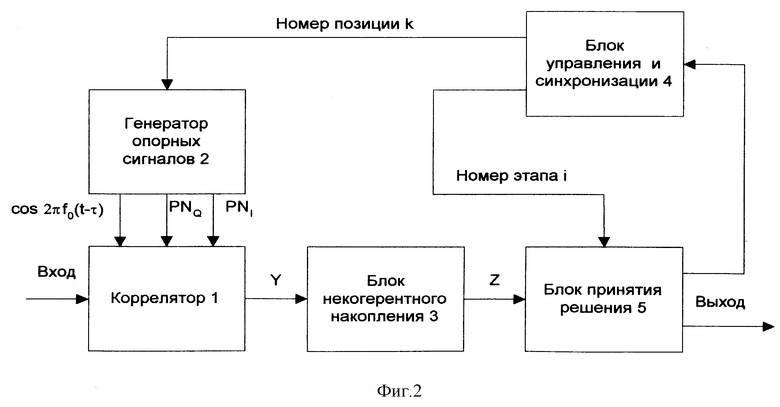
Устройство для реализации описанного способа поиска широкополосного сигнала по Витерби представлено на фиг. 2. Устройство-прототип в соответствии с фиг. 2 содержит коррелятор 1, генератор опорных сигналов 2, блок некогерентного накопления 3, блок управления и синхронизации 4 и блок принятия решения 5, при этом первый вход коррелятора 1 является сигнальным входом устройства, вторые входы коррелятора 1 соединены с выходами генератора опорных сигналов 2, выход коррелятора 1 соединен с входом блока некогерентного накопления 3, выход которого подключен к первому входу блока принятия решения 5, второй вход которого соединен с первым выходом блока управления и синхронизации 4, который является для блока принятия решения 5 управляющим, второй выход блока управления и синхронизации 4 соединен с входом генератора опорных сигналов 2, первый выход блока принятия решения 5 соединен с входом блока управления и синхронизации 4, а второй его выход является выходом устройства.
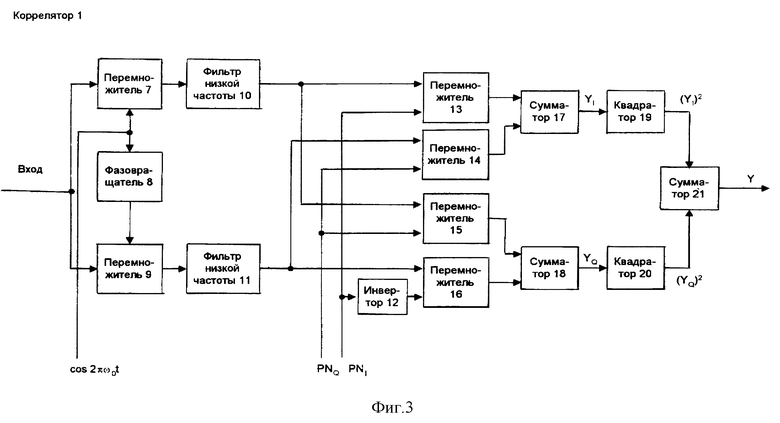
Коррелятор представлен на фиг. 3 и выполнен в соответствии с [7, р. 42, fig. 3.1 (b)] . Коррелятор в соответствии с фиг. 3 содержит последовательно соединенные первый перемножитель 7 и первый фильтр низкой частоты 10, последовательно соединенные второй перемножитель 9 и второй фильтр низкой частоты 11, инвертор 12, третий 13, четвертый 14, пятый 15 и шестой 16 перемножители, а также первый 17 и второй 18 сумматоры, первый 19 и второй 20 квадраторы и сумматор 21, при этом первые входы первого 7 и второго 9 перемножителей являются сигнальными входами устройства, вторые входы перемножителей 7 и 9 соединены с выходом генератора опорных сигналов 2, причем перемножитель 7 непосредственно, а перемножителя 9 - через фазовращатель 8, выход первого фильтра низкой частоты 10 соединен с первыми входами третьего 13 и пятого 15 перемножителей, выход второго фильтра низкой частоты 11 соединен с первыми входами четвертого 14 и шестого 16 перемножителей, вторые входы этих перемножителей соединены с выходами генератора опорных сигналов 2, причем вторые входы перемножителей 13, 14 и 15 - непосредственно, а перемножителя 16 - через инвертор 12, выходы третьего 13 и четвертого 14 перемножителей соединены с входами первого сумматора 17, выходы пятого 15 и шестого 16 перемножителей соединены с входами второго сумматора 18, выходы которых соответственного соединены с входами первого 19 и второго 20 квадраторов, выходы которых подключены соответственно к первому и второму входам сумматора 21, выход которого является выходом коррелятора.
Способ-прототип реализуют, используя устройства (фиг. 2 и 3) следующим образом.
Входным сигналом устройства является сигнал с неизвестными параметрами синхронизации. Такими параметрами в общем случае могут быть фаза псевдослучайной последовательности (ПСП), использованной для расширения спектра, частота несущей или какой-либо один из этих параметров. Область неопределенности неизвестных параметров делится на N подобластей - позиций. Каждой позиции соответствует некоторый набор значений неизвестных параметров синхронизации.
Поиск сигнала на каждой позиции осуществляют последовательно в q этапов, при этом для каждого этапа поиска формируют значения порогов θ1...θq, a также в генераторе опорных сигналов 2 формируют опорный сигнал со значениями параметров синхронизации, соответствующими текущей позиции области неопределенности.
На каждом i-м этапе поиска в корреляторе 1 вычисляется последовательность оценок корреляции Y входного и опорного сигналов на Мi интервалах когерентности сигнала.
Способ вычисления последовательности оценок корреляции Y может быть проиллюстрирован на примере входного сигнала, характерного для систем связи CDMA. Это высокочастотный (ВЧ) сигнал, который представляет сумму синфазной 1 и квадратурной Q составляющих. Синфазная и квадратурная составляющие входного сигнала имеют сдвиг по фазе несущей частоты, равный 90 градусов. С целью расширения спектра синфазная и квадратурная составляющие промодулированы псевдослучайными последовательностями (PN кодами) PNI и PNQ соответственно.
Смесь входного сигнала и шума поступает на первые входы первого 7 и второго 9 перемножителей, на вторые входы которых поступает сигнал несущей частоты cos2□f0t c генератора опорных сигналов 2, причем на перемножитель 7 непосредственно, а на перемножитель 9 - через фазовращатель 8. Выходной сигнал с перемножителей 7 и 9 фильтруют на низкой частоте в первом 10 и втором 11 фильтрах низкой частоты. Таким образом, на каждом этапе осуществляют квадратурную демодуляцию входного сигнала на длительности Мi последовательных интервалов когерентности сигнала.
Опорные ПСП PNI и PNQ поступают на вторые входы третьего 13, четвертого 14, пятого 15 и шестого 16 перемножителей, причем на второй вход шестого перемножителя 16 - через инвертор 12, на первые входы которых поступают выходные сигналы с первого 10 и второго 11 фильтров низкой частоты, таким образом осуществляют комплексное перемножение входного и опорного сигналов.
Результаты комплексного перемножения суммируют в первом 17 и втором 18 сумматорах на длительности каждого из Мi интервалов когерентности сигнала, образуя таким образом две последовательности (YI и YQ) из Mi значений корреляции входного и опорного сигналов.
В первом 19 и втором 20 квадраторах вычисляют квадратичные значения полученных последовательностей, полученные величины суммируют и накапливают в сумматоре 21, формируя последовательность оценок корреляции Y= YI 2+YQ 2 входного и опорного сигналов на Mi интервалах когерентности.
Сформированная последовательность оценок корреляции Y поступает на вход блока некогерентного накопления, где значения последовательности суммируются между собой, а также с результатами, полученными на предыдущих этапах поиска на текущей позиции. Таким образом формируют решающую величину Zi на текущем (i-м) этапе поиска.
Решающую величину Zi текущего этапа поиска сравнивают с заданной величиной порога θi в блоке принятия решения 5 и по результатам сравнения принимают решение об обнаружении сигнала и прекращении поиска или не обнаружении сигнала и переходу к поиску на следующей позиции области неопределенности.
Управление поиском осуществляется блоком управления и синхронизации 4, на вход которого поступает сигнал о принятии решения с выхода блока 5, а на выходе формируются сигналы номера позиции для генератора опорных сигналов 2 и сигнал номера этапа поиска для блока принятия решения 5.
Способ поиска широкополосного сигнала и алгоритм его реализации по Витерби ([7] , Andrew J. Viterbi) основан на применении ускоренной многоэтапной процедуры принятия решения и стратегии случайного момента остановки поиска.
Стратегия случайного момента остановки предполагает прекращение поиска при первом же обнаружении сигнала. Такая стратегия позволяет сократить среднее время поиска, отказавшись от просмотра оставшихся позиций области неопределенности. Если на входе приемника присутствует несколько сигналов с одинаковой формой ПСП, но разными задержками, то отказ от просмотра оставшихся позиций может привести к захвату сигнала менее предпочтительного с системной точки зрения. Например, захват сигнала от более удаленной базовой станции приведет к необходимости осуществлять процедуру HANDOFF (хэндофф) сразу после вхождения в синхронизм. Это приведет, во-первых, к значительным затратам времени и ресурсов на данной МС, во-вторых, к увеличению общего уровня помех, создаваемых данной МС во время процедуры HANDOFF. В конечном счете, это приводит к снижению емкости сотовой системы. С другой стороны, стратегия, предполагающая фиксированный момент окончания поиска только после полного цикла сканирования, приводит к увеличению среднего времени поиска.
Многоэтапная процедура алгоритма Витерби предполагает применение порогов постоянных уровней. Постоянные уровни порогов приводят к тому, что процедура является оптимальной только при одном значении отношения сигнал-шум. При других значениях отношения сигнал-шум эффективность процедуры снижается. Например, при повышении отношения сигнал-шум среднее время поиска может даже несколько увеличиться из-за несоответствия уровней порогов. Это является основным недостатком прототипа.
Сущность изобретения
Задачей, на решение которой направлена заявляемая группа изобретений, - способ поиска широкополосного сигнала (варианты) и устройство для его реализации - является повышение вероятности правильного обнаружения сигнала и сокращение времени поиска сигнала. Эта задача решается за счет применения многоэтапной процедуры принятия решения, стратегии полного цикла сканирования и адаптации уровней порогов многоэтапной процедуры.
Поставленная задача решается следующим образом.
Способ поиска широкополосного сигнала по первому варианту заключается в том, что осуществляют последовательный поиск по области неопределенности, каждая позиция которой соответствует некоторому набору неизвестных параметров синхронизации сигнала, при этом поиск сигнала на каждой позиции области неопределенности осуществляют последовательно в q этапов, при этом формируют значения порогов θ1...θq для каждого этапа поиска, формируют опорный сигнал, представляющий копию входного сигнала, со значениями параметров, соответствующими текущей позиции области неопределенности, вычисляют корреляцию между входным и опорным сигналами, образуя величины оценок корреляции Y на Мi последовательных интервалах когерентности сигнала, соответствующих текущему i-му этапу поиска, формируют решающую величину Zi текущего i-го этапа поиска, как сумму оценок корреляции Y, полученных на текущем и всех предыдущих этапах поиска, сформированную решающую величину Zi сравнивают с заданной величиной порога текущего этапа поиска θi, по результатам сравнения принимают решение о наличии или отсутствии сигнала таким образом, что:
- если решающая величина на текущем этапе поиска Zi не превышает порог(Zi< θi, а i < q, где i - номер текущего этапа поиска), то принимают решение об отсутствии сигнала со значениями параметров, соответствующими текущей позиции области неопределенности, причем принимают на любом этапе поиска, после чего переходят к поиску на следующей позиции области неопределенности;
- если решающая величина на последнем этапе поиска превышает величину порога θq, то принимают решение о наличии сигнала со значениями параметров, соответствующими текущей позиции области неопределенности;
- дополнительно вводят следующую последовательность новых операций:
- при принятии решения о наличии сигнала, величину порога последнего этапа поиска на оставшихся позициях области неопределенности заменяют на значение решающей величины Zq, а величины порогов θ1...θq-1 всех этапов поиска, кроме последнего, на оставшихся позициях области неопределенности увеличивают в зависимости от разности между решающей величиной и величиной порога (Zq-θq);
- поиск продолжают до достижения последней позиции области неопределенности;
- после завершения полного цикла сканирования всей области неопределенности останавливают поиск и переходят в режим слежения со значениями параметров сигнала, соответствующими позиции области неопределенности, на которой произошло последнее превышение порога θq на последнем этапе поиска;
- если не произошло превышения порога θq на последнем этапе поиска за цикл сканирования области неопределенности, то определяют величину оценки корреляции YE на интервале когерентности сигнала, усредненную за цикл сканирования;
- формируют величины порогов θ1...θq с использованием усредненной оценки корреляции и возобновляют поиск с 1-й позиции.
Способ поиска широкополосного сигнала по второму варианту заключается в том, что осуществляют последовательный поиск по области неопределенности, каждая позиция которой соответствует некоторому набору неизвестных параметров синхронизации сигнала, при этом поиск сигнала на каждой позиции области неопределенности осуществляют последовательно в q этапов, при этом формируют значения порогов θ1...θq для каждого этапа поиска, формируют опорный сигнал, представляющий копию входного сигнала, со значениями параметров, соответствующими текущей позиции области неопределенности, вычисляют корреляцию между входным и опорным сигналами, образуя величины оценок корреляции Y на Mi последовательных интервалах когерентности сигнала, соответствующих текущему i-му этапу поиска, формируют решающую величину Zi текущего i-гo этапа поиска как сумму оценок корреляции Y, полученных на текущем и всех предыдущих этапах поиска, сформированную решающую величину Zi сравнивают с заданной величиной порога текущего этапа поиска θi, по результатам сравнения принимают решение о наличии или отсутствии сигнала таким образом, что:
- если решающая величина на текущем этапе поиска Zi не превышает порог Zi< θi, a i < q, где i - номер текущего этапа поиска), то принимают решение об отсутствии сигнала со значениями параметров, соответствующими текущей позиции области неопределенности, причем принимают на любом этапе поиска, после чего переходят к поиску на следующей позиции области неопределенности;
- если решающая величина превышает величину последнего порога θq на последнем этапе поиска, то принимают решение о наличии сигнала со значениями параметров, соответствующими текущей позиции области неопределенности;
- дополнительно вводят следующую последовательность новых операций:
- определяют количество интервалов когерентности Nа, необходимое для получения усредненной оценки корреляции;
- цикл сканирования делят на периоды адаптации, длительность каждого из которых больше или равна длительности Nа интервалов когерентности;
- по окончании каждого периода определяют величину оценки корреляции YE на интервале когерентности сигнала, усредненную за предшествующий период адаптации, формируют величины порогов θ1...θq с использованием полученной усредненной оценки корреляции;
- при принятии решения о наличии сигнала величину порога последнего этапа поиска на оставшихся позициях области неопределенности заменяют на значение решающей величины Zq, а величины порогов θ1...θq-1 всех этапов поиска, кроме последнего, на оставшихся позициях увеличивают в зависимости от разности между решающей величиной и величиной последнего порога (Zq-θq);
- поиск продолжают до достижения последней позиции области неопределенности;
- после завершения полного цикла сканирования всей области неопределенности останавливают поиск и переходят в режим слежения со значениями параметров сигнала, соответствующими позиции области неопределенности, на которой произошло последнее превышение порога θq на последнем этапе поиска;
- если не произошло превышения порога θq на последнем этапе поиска за цикл сканирования области неопределенности, то поиск возобновляют с первой позиции.
Способ поиска широкополосного сигнала по третьему варианту заключается в том, что осуществляют последовательный поиск по области неопределенности, каждая позиция которой соответствует некоторому набору неизвестных параметров синхронизации сигнала, при этом поиск сигнала на каждой позиции области неопределенности осуществляют последовательно в q этапов, при этом формируют значения порогов θ1...θq для каждого этапа поиска, формируют опорный сигнал, представляющий копию входного сигнала, со значениями параметров, соответствующими текущей позиции области неопределенности, вычисляют корреляцию между входным и опорным сигналами, образуя величины оценок корреляции Y на Mi последовательных интервалах когерентности сигнала, соответствующих текущему - i-му этапу поиска, формируют решающую величину Zi текущего i-го этапа поиска как сумму оценок корреляции Y, полученных на текущем и всех предыдущих этапах поиска, сформированную решающую величину Zi сравнивают с заданной величиной порога текущего этапа поиска θi, по результатам сравнения принимают решение о наличии или отсутствии сигнала таким образом, что
- если решающая величина на текущем этапе поиска Zi не превышает порог(Zi< θi, a i < q, где i - номер текущего этапа поиска), то принимают решение об отсутствии сигнала со значениями параметров, соответствующими текущей позиции области неопределенности, причем принимают на любом этапе поиска, после чего переходят к поиску на следующей позиции области неопределенности;
- если решающая величина превышает величину последнего порога θq на последнем этапе поиска, то принимают решение о наличии сигнала со значениями параметров, соответствующими текущей позиции области неопределенности;
- дополнительно вводят следующую последовательность новых операций:
- определяют период адаптации, как сумму интервалов когерентности, необходимых для получения усредненной оценки корреляции на интервале когерентности;
- по окончании периода адаптации определяют оценку корреляции YE на интервале когерентности сигнала, усредненную по предшествующему периоду адаптации, корректируют величины порогов θ1...θq с использованием полученной усредненной оценки корреляции;
- обновляют величину усредненной оценки корреляции, включая в нее L вновь полученных величин оценки корреляции и исключая столько же величин оценки корреляции, соответствующих началу периода адаптации, после этого корректируют значения порогов θ1...θq с использованием обновленной величины усредненной оценки корреляции;
- при принятии решения о наличии сигнала величину порога последнего этапа поиска на оставшихся позициях области неопределенности заменяют на значение решающей величины Zq, а величины порогов θ1...θq-1 всех этапов поиска, кроме последнего, на оставшихся позициях области неопределенности увеличивают в зависимости от разности между решающей величиной и величиной последнего порога (Zq-θq);
- поиск продолжают до достижения последней позиции области неопределенности;
- после завершения полного цикла сканирования всей области неопределенности останавливают поиск и переходят в режим слежения со значениями параметров сигнала, соответствующими позиции области неопределенности, на которой произошло последнее превышение порога θq на последнем этапе поиска;
- если не произошло превышения порога θq на последнем этапе поиска за цикл сканирования области неопределенности, то поиск возобновляют с первой позиции.
Сопоставительный анализ с прототипом трех предлагаемых вариантов способа поиска широкополосного сигнала показывает, что они отличаются новизной. Сравнение заявляемых вариантов способа с другими техническими решениями, известными в данной области техники [1-6] , не позволило выявить признаки, заявленные в отличительной части формулы изобретения. При этом заявляемые варианты способа поиска широкополосного сигнала позволили существенно, качественно улучшить основные характеристики способа. Это достигается за счет следующих основных технических решений.
Во-первых, это компенсация увеличения среднего времени поиска, вызванного применением стратегии полного цикла сканирования. Многоэтапная процедура позволяет управлять временем поиска изменением величин порогов. Поэтому можно сократить время поиска, используя корректировку уровней порогов после обнаружения каждого нового сигнала.
Во-вторых, это предложенные операции способа по формированию порогов.
Они отличаются от описанных в [9 и 10] . В данном способе широкополосного сигнала предлагаются операции, основанные на получении усредненной оценки корреляции за некоторый период адаптации. Период адаптации может представлять часть цикла сканирования или полный цикл сканирования.
Эффективность такого решения значительно увеличивается в условиях поиска на мобильной станции, где, как правило, проводится несколько циклов сканирования от начала поиска до момента обнаружения сигнала. Это связано со значительным рассогласованием между несущими частотами входного и опорного сигналов.
Частотное рассогласование приводит к быстрым изменениям фазы несущей входного сигнала, а также фазы ПСП. В результате, во-первых, сокращается интервал когерентности сигнала, во-вторых, сокращается временной интервал, в течение которого разность фаз между ПСП входного и опорного сигналов изменяется на значительную величину, более одного чипа. Последнее обстоятельство приводит к ограничению на длительность цикла сканирования.
При этом, чтобы обеспечить низкую вероятность ложного обнаружения за ограниченный цикл сканирования при коротком интервале когерентности сигнала, приходится устанавливать величины порогов так, что вероятность пропуска сигнала становится значительной. В этих условиях вероятность завершения поиска за один цикл мала, и проводится, как правило, несколько циклов сканирования от начала поиска до момента обнаружения сигнала.
Это обстоятельство позволяет значительно повысить эффективность поиска за счет алгоритма с адаптацией порога. Это значит, что часть первого цикла (в частном случае весь цикл) сканирования отводится на адаптацию - формирование порога. При этом поиск выполняется с уровнями порогов, предварительно определенными для наихудших условий, то есть для минимального отношения сигнал-шум. Первоначальные уровни порогов формируются таким образом, что вероятность ложного обнаружения достаточно низка.
По окончании периода адаптации формируются уровни порогов по усредненной величине оценки корреляции. При этом среднее время поиска на последующих позициях области неопределенности сокращается за счет оптимизации уровней порогов.
В данном изобретении предлагается 3 варианта реализации адаптации порога. Первый вариант соответствует случаю, когда период адаптации равен циклу сканирования. Во втором варианте период адаптации порога составляет часть цикла сканирования. В третьем варианте адаптация порога осуществляется по методу скользящего среднего, то есть усредненная величина оценки корреляции формируется к концу периода адаптации, а затем обновляется за счет включения новых значений оценки корреляции и исключения ранних значений оценки корреляции.
Для реализации заявляемого способа поиска широкополосного сигнала (три варианта) предлагается устройство (фиг. 4).
В устройство поиска широкополосного сигнала, содержащее коррелятор, генератор опорных сигналов, блок некогерентного накопления, блок управления и синхронизации и блок принятия решения, при этом первый вход коррелятора является сигнальным входом устройства, вторые входы коррелятора соединены с выходами генератора опорных сигналов, выход коррелятора соединен с входом блока некогерентного накопления, выход которого подключен к первому входу блока принятия решения, второй вход которого соединен с первым выходом блока управления и синхронизации, который является для блока принятия решения управляющим, второй выход блока управления и синхронизации соединен с входом генератора опорных сигналов, первый выход блока принятия решения соединен с входом блока управления и синхронизации, а второй его выход является выходом устройства, дополнительно введены:
- блок формирования и коррекции порогов, при этом соответственно введены принципиально новые связи;
- второй выход блока управления и синхронизации соединен с первым входом блока формирования и коррекции порогов, который является информационным сигналом о номере текущей позиции области неопределенности, третий выход блока управления и синхронизации соединен со вторым входом блока формирования и коррекции порогов, который является сигналом тактовых импульсов, третий вход блока формирования и коррекции порогов соединен с выходом коррелятора и является входным сигналом оценки величины корреляции Y на интервале когерентности сигнала, четвертый вход этого блока подключен к выходу блока некогерентного накопления и является входным сигналом решающей величины Z, пятый вход соединен с первым выходом блока принятия решения и является первым сигналом принятия решения, шестой вход - с третьим выходом блока принятия решения и является вторым сигналом принятия решения, а выход блока формирования и коррекции порогов соединен с третьим входом блока принятия решения.
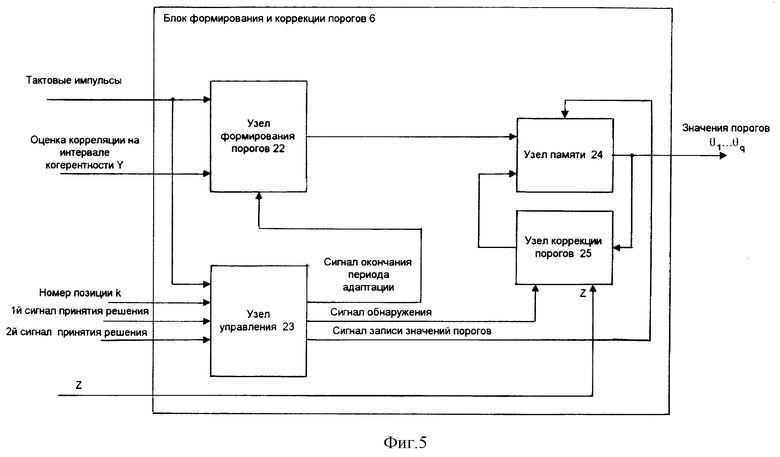
Причем блок формирования и коррекции порогов содержит узел формирования порогов, узел управления, узел памяти и узел коррекции порогов, при этом первые входы узла формирования порогов и узла управления объединены и являются соответственно вторым входом блока формирования и коррекции порогов, второй вход узла формирования порогов является третьим входом блока формирования и коррекции порогов, третий вход узла формирования порогов соединен с первым выходом узла управления и является сигналом окончания периода адаптации, выход узла формирования порогов подключен к первому входу узла памяти, второй, третий и четвертый входы узла управления являются соответственно первым, пятым и шестым входами блока формирования и коррекции порогов, второй выход узла управления соединен с первым входом узла коррекции порогов и является сигналом обнаружения, третий выход узла управления подключен ко второму входу узла памяти и является сигналом записи значений порогов, третий вход узла памяти соединен с выходом узла коррекции порогов, а выход является выходом блока формирования и коррекции порогов и соединен со вторым входом узла коррекции порогов и является сигналом значений порогов, третий вход узла коррекции порогов является четвертым входом блока формирования и коррекции порогов, сигналом решающей величины Z.
Сопоставительный анализ заявляемого устройства с прототипом [7] показал, что заявляемое устройство обладает новизной. Сопоставительный анализ с другими техническими решениями, известными в данной области техники, не позволил выявить признаки, заявленные в отличительной части формулы изобретения.
Следовательно, можно предположить, что заявляемая группа изобретений - способ поиска широкополосного сигнала (варианты) и устройство для его реализации - отвечает критериям патентоспособности.
Перечень фигур чертежей
Изобретение поясняется графическими материалами. Фиг. 1 иллюстрирует этапы поиска широкополосного сигнала, которые реализует алгоритм Витерби [7] , принятый за прототип. На фиг. 2 представлена блок-схема устройства поиска широкополосного сигнала (прототип). Фиг. 3 - блок-схема коррелятора, который используется в прототипе и заявляемом устройстве, приведен для понимания работы заявляемых способа поиска широкополосного сигнала и устройства для его реализации. Фиг. 4 иллюстрирует блок-схему заявляемого устройства поиска широкополосного сигнала. На фиг. 5 изображена блок-схема блока формирования и коррекции порогов, приведена в качестве примера реализации в составе заявляемого устройства. На фиг. 6 - 8 представлены временные диаграммы коррекции порогов соответственно при первом, втором и третьем вариантах реализации заявляемого способа.
Устройство-прототип, блок-схема которого представлена на фиг. 2, содержит:
1 - коррелятор,
2 - генератор опорных сигналов,
3 - блок некогерентного накопления,
4 - блок управления и синхронизации,
5 - блок принятия решения.
Коррелятор, используемый в прототипе и в заявляемом устройстве, в соответствии с фиг. 3 содержит:
7, 9, 13, 14, 15 и 16 - соответственно первый, второй, третий, четвертый, пятый и шестой перемножители,
8 - фазовращатель,
10, 11 - соответственно первый и второй фильтры низкой частоты,
12 - инвертор,
17, 18 - соответственно первый и второй сумматоры,
19, 20 - соответственно первый и второй квадраторы,
21 - сумматор.
Заявляемое устройство поиска широкополосного сигнала, блок-схема которого представлена на фиг. 4, содержит:
1 - коррелятор,
2 - генератор опорных сигналов,
3 - блок некогерентного накопления,
4 - блок управления и синхронизации,
5 - блок принятия решения,
6 - блок формирования и коррекции порогов.
Блок формирования и коррекции порогов, введенный в блок-схему заявляемого устройства, представленный на фиг. 5, содержит:
22 - узел формирования порогов,
23 - узел управления,
24 - узел памяти,
25 - узел коррекции порогов.
Осуществление изобретения
Заявляемый способ поиска широкополосного сигнала реализуют следующим образом (см. фиг. 3 - 5).
Параметры сигналов опорного генератора 2, относительно которых осуществляется поиск, устанавливают в соответствии с текущей позицией области неопределенности. С этой целью на выходе блока управления и синхронизации 5 формируется номер текущей позиции и поступает на вход генератора опорных сигналов 2. Параметрами поиска могут быть, например, частота f входного сигнала и фаза ПСП или один из них. В узел памяти 24 блока формирования и коррекции порогов 6 (фиг. 5) записывают значения порогов □1...□q для каждого из этапов поиска.
Смесь входного сигнала и шума поступает на вход коррелятора 1. На опорные входы коррелятора поступают опорные сигналы с генератора опорных сигналов. Опорные сигналы - это сигнал высокой частоты cos2□f0t,/ и псевдослучайные последовательности, которые использовались на передающем конце для расширения спектра сигнала. В корреляторе 1 вычисляются значения оценок корреляции входного и опорного сигналов на каждом из интервалов когерентности сигнала.
Вычисление оценки корреляции Y в корреляторе 1 может быть выполнено способом, который описан у Витерби [7] . То есть смесь входного сигнала и шума поступает на первые входы первого 7 и второго 9 перемножителей, на вторые входы которых поступает сигнал несущей частоты cos2□f0t с генератора опорных сигналов 2, причем на перемножитель 7 непосредственно, а на перемножитель 9 - через фазовращатель 8. Выходной сигнал с перемножителей 7 и 9 фильтруют на низкой частоте в первом 10 и втором 11 фильтрах низкой частоты. Таким образом, на каждом этапе осуществляют квадратурную демодуляцию входного сигнала на длительности Мi последовательных интервалов когерентности сигнала.
Опорные ПСП PNI и PNQ поступают на вторые входы третьего 13, четвертого 14, пятого 15 и шестого 16 перемножителей, причем на второй вход шестого перемножителя 16 - через инвертор 12, на первые входы которых поступают выходные сигналы с первого 10 и второго 11 фильтров низкой частоты, таким образом осуществляют комплексное перемножение входного и опорного сигналов.
Результаты комплексного перемножения суммируют в первом 17 и втором 18 сумматорах на длительности каждого из Mi интервалов когерентности сигнала, образуя таким образом две последовательности (YI и YQ) из Мi значений оценки корреляции входного и опорного сигналов.
В первом 19 и втором 20 квадраторах вычисляют квадратичные значения полученных последовательностей значений корреляции, полученные величины суммируют и накапливают в сумматоре 21, формируя последовательность оценок корреляции Y= YI 2+YQ 2 входного и опорного сигналов на Мi интервалах когерентности сигнала. Сформированная последовательность оценок корреляции Y поступает на вход блока некогерентного накопления, где значения последовательности суммируются между собой, а также с результатами, полученными на предыдущих этапах поиска на текущей позиции. Таким образом формируют решающую величину Zi на текущем (i-м) этапе поиска.
Управление поиском осуществляется блоком управления и синхронизации 4, на вход которого поступает сигнал о принятии решения с выхода блока 5, а на выходе формируются сигналы номера позиции для генератора опорных сигналов 2 и сигнал номера этапа поиска для блока принятия решения 5.
Процедура принятия решения на каждой позиции области неопределенности осуществляется последовательно в несколько этапов. Максимальное количество этапов q. При этом решающая величина Zi, сформированная в блоке некогерентного накопления 3 на i-м этапе поиска, поступает на вход блока принятия решения 5, где сравнивается с заданной величиной порога θi..
По результатам сравнения принимают решение об обнаружении сигнала или не обнаружении на текущей позиции области. Решение об отсутствии сигнала принимается на любом этапе поиска в случае, если Zi< □i Решение об обнаружении сигнала принимается только на последнем этапе многоэтапной процедуры в случае, если Zq ≥ □q. Для осуществления такого алгоритма принятия решения на второй вход блока принятия решения 5 поступает сигнал о номере этапа поиска с выхода блока управления и синхронизации 4.
Дальнейшие операции реализации заявляемого способа обладают существенной новизной и заключаются в следующем.
В случае принятия решения об обнаружении сигнала величину порога последнего этапа поиска заменяют на значение решающей величины □q= Zq, a величины порогов θ1...θq-1 всех этапов поиска, кроме последнего, увеличивают в зависимости от разности между решающей величиной и величиной последнего порога (Zq-θq). Например, каждый из порогов □i(i = 1...q) может быть увеличен на величину K
В течение всего цикла сканирования в узле формирования порогов 22 вычисляется YE - усредненное значение оценки корреляции на интервале когерентности сигнала. Значение YE используется для формирования порогов.
Вычисление YE и по первому варианту заявляемого способа выполняется следующим образом.
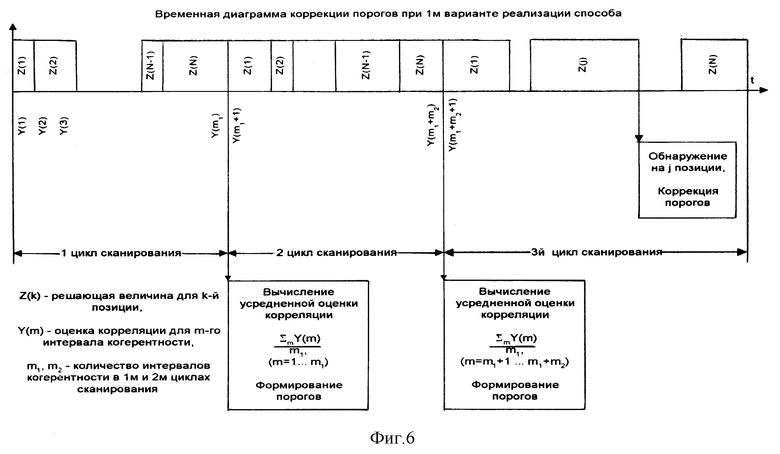
В узле формирования порогов 22 последовательно суммируются значения оценки корреляции Y, полученные на каждом из интервалов когерентности сигнала, независимо от номера этапа и номера позиции области неопределенности. При этом подсчитывается общее количество интервалов когерентности, прошедших с начала поиска. Эти операции могут быть выполнены, например, с помощью накопительного сумматора и счетчика тактовых импульсов. Усредненное значение YE оценки корреляции на интервале когерентности сигнала вычисляется по окончании полного цикла сканирования области неопределенности делением выходной величины накопительного сумматора на выходную величину счетчика тактовых импульсов. Значения порогов могут быть вычислены с использованием величины YE программно или аппаратно по окончании цикла.
На фиг. 6 приведена временная диаграмма процесса коррекции порогов по первому варианту заявляемого способа (приведена в качестве примера). На фиг. 6 изображен случай, когда не произошло обнаружения сигнала в первом и втором циклах сканирования. По окончании каждого из них формируются значения порогов. Новые значения порогов используются при поиске в каждом из последующих циклов сканирования, обеспечивая максимальную эффективность многоэтапной процедуры. Обнаружение сигнала в приведенном примере произошло на j-й позиции в третьем цикле сканирования. После этого корректируются пороги. Скорректированные значения порогов используются при поиске на j+1 и последующих позициях области неопределенности. При этом могут быть обнаружены более мощные сигналы по сравнению с уже обнаруженным.
Вычисление YE и формирование порогов по второму варианту предлагаемого способа выполняется следующим образом.
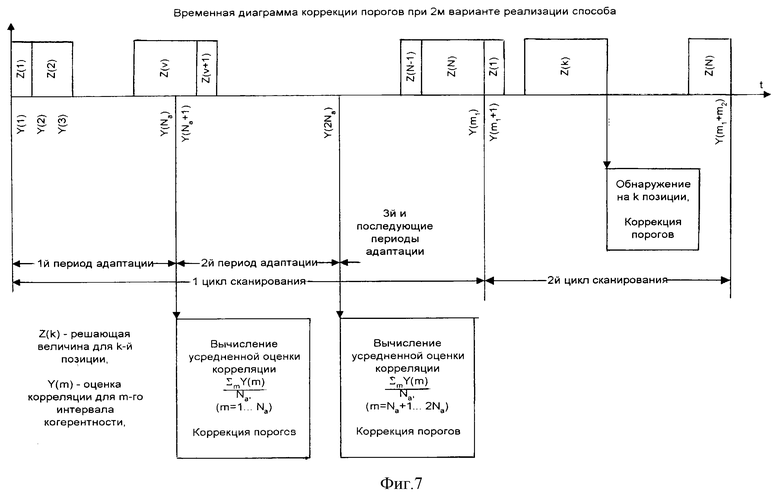
В узле формирования порогов 22 последовательно суммируются значения оценки корреляции Y, полученные на каждом из интервалов когерентности, независимо от номера этапа и номера позиции области неопределенности. При этом подсчитывается общее количество интервалов когерентности, прошедших с начала поиска. Эти операции могут быть выполнены, например, с помощью накопительного сумматора и счетчика тактовых импульсов. Усредненное значение YE оценки корреляции на интервале когерентности сигнала вычисляется по окончании периода адаптации делением выходной величины накопительного сумматора на выходную величину счетчика тактовых импульсов. Значения порогов могут быть вычислены с использованием величины YE программно или аппаратно по окончании периода адаптации.
На фиг. 7 приведена временная диаграмма процесса коррекции порогов по второму варианту заявляемого способа (приведена в качестве примера). На фиг. 7 приведен случай, когда цикл сканирования разбит на равные периоды адаптации по Nа интервалов когерентности сигнала в каждом. Окончание первого периода адаптации произошло при поиске на V-й позиции области неопределенности. После этого формируются значения порогов. Новые значения порогов используются при поиске на V+1 и всех последующих позициях, обеспечивая максимальную эффективность многоэтапной процедуры. Обнаружение сигнала в приведенном примере произошло на j-й позиции во втором цикле сканирования. Скорректированные значения порогов используются при поиске на j+1 и последующих позициях области неопределенности. При этом могут быть обнаружены более мощные сигналы по сравнению с обнаруженным сигналом.
Вычисление YE и формирование порогов по третьему варианту предлагаемого способа выполняется следующим образом.
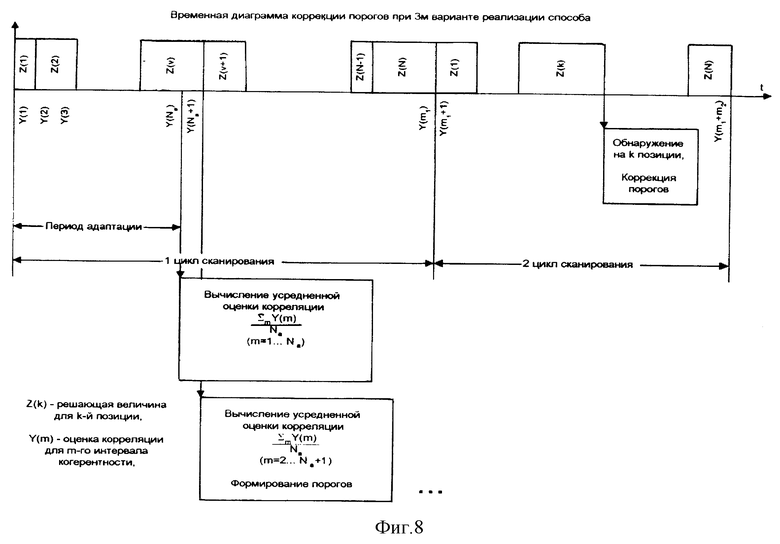
В узле формирования порогов 22 последовательно суммируются значения оценки корреляции Y, полученные на периоде адаптации, который состоит из Na последовательных интервалов когерентности. По окончании периода адаптации вычисляется усредненная оценка корреляции YE как отношение полученной суммы к Na. По мере вычисления новых значений оценки корреляции Y усредненная оценка корреляции YE обновляется. При этом L новых значений корреляции (L≥1) суммируются с полученной суммой, а L значений оценки корреляции, соответствующих началу периода адаптации, вычитаются из нее. Все перечисленные операции могут быть выполнены, например, с помощью накопительного сумматора с суммирующим и вычитающим входами, линии задержки на Na ячеек и перемножителя, выполняющего умножение суммы на 1/Na. Усредненное значение YE оценки корреляции на интервале когерентности сигнала используется для формирования порогов.
Уровни порогов для всех вариантов заявляемого способа могут быть сформированы, например, по линейному закону
θi = αi+βi•YE, (2)
где αi, βi - числа, зависящие от номера этапа, количества интервалов когерентности Мi, которые добавляются ко времени вычисления решающей величины на i-м этапе. Не исключаются и другие способы формирования порогов.
Предлагаемая группа изобретений - способ приема широкополосного сигнала (варианты) и устройство для его реализации - обладают существенными преимуществами по сравнению с известными техническими решениями, созданными в данной области техники [1 - 10] . Это повышение вероятности правильного обнаружения сигнала и сокращение времени поиска сигнала за счет применения многоэтапной процедуры принятия решения, стратегии полного цикла сканирования и адаптации уровней порогов многоэтапной процедуры.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ПОИСКА СИГНАЛА С ИСПОЛЬЗОВАНИЕМ БЫСТРОГО ПРЕОБРАЗОВАНИЯ ФУРЬЕ | 1999 |
|
RU2179785C2 |
| СПОСОБ АДАПТИВНОГО КВАЗИКОГЕРЕНТНОГО МНОГОЛУЧЕВОГО ПРИЕМА В ПРЯМОМ КАНАЛЕ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2178955C2 |
| СПОСОБ АВТОПОДСТРОЙКИ ЧАСТОТЫ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 1999 |
|
RU2168267C2 |
| СПОСОБ ПОИСКА МНОГОЛУЧЕВОГО ШИРОКОПОЛОСНОГО СИГНАЛА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ, СПОСОБ ОБНАРУЖЕНИЯ И ОЦЕНКИ РАЗМЕРА КЛАСТЕРА СИГНАЛОВ ЛУЧЕЙ И БЛОК, ЕГО РЕАЛИЗУЮЩИЙ | 2001 |
|
RU2208916C1 |
| Способ высокоточной оценки несущей частоты сигнала в широкополосных системах связи | 2018 |
|
RU2691972C1 |
| СПОСОБ КОГЕРЕНТНОГО ПРИЕМА С РЕШАЮЩЕЙ ОБРАТНОЙ СВЯЗЬЮ | 1999 |
|
RU2168275C2 |
| СПОСОБ И УСТРОЙСТВО КОГЕРЕНТНОГО ПРИЕМА В ОБРАТНОМ КАНАЛЕ CDMA ПО IS-95 | 1999 |
|
RU2209526C2 |
| УСТРОЙСТВО ПОИСКА ШУМОПОДОБНЫХ СИГНАЛОВ | 1979 |
|
SU1840116A2 |
| СПОСОБ ПОИСКА ШИРОКОПОЛОСНОГО СИГНАЛА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2159508C1 |
| СПОСОБ ПРИЕМА МНОГОЛУЧЕВОГО СИГНАЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2297713C2 |
Изобретение относится к области радиотехники, в частности к способам и устройствам поиска широкополосного сигнала в системах связи с кодовым разделением каналов (CDMA). Задача, на решение которой направлена заявляемая группа изобретений, - способ поиска широкополосного сигнала (варианты) и устройство для его реализации - это повышение вероятности правильного обнаружения сигнала и сокращение времени поиска сигнала. Эта задача решается за счет применения многоэтапной процедуры принятия решения, стратегии полного цикла сканирования и адаптации уровней порогов многоэтапной процедуры. Изобретение включает три варианта реализации способа поиска широкополосного сигнала, а также устройство для реализации вариантов способа. Устройство поиска широкополосного сигнала содержит коррелятор, генератор опорных сигналов, блок некогерентного накопления, блок управления и синхронизации, блок принятия решения и блок формирования и коррекции порогов. Технический результат, достигаемый при реализации заявленной группы изобретений, состоит в повышении вероятности правильного обнаружения сигнала и сокращении времени поиска сигнала. 4 с. и 1 з. п. ф-лы, 8 ил.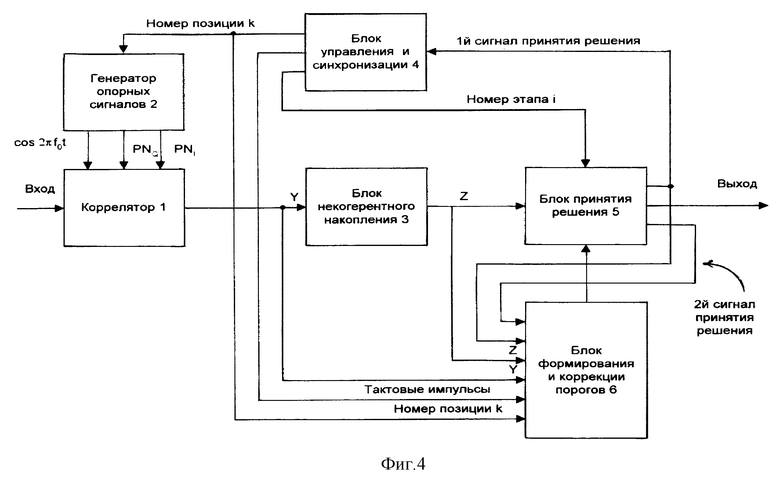
| УСТРОЙСТВО ПОИСКА ШУМОПОДОБНОГО СИГНАЛА | 1990 |
|
RU2007044C1 |
| Устройство поиска шумоподобного сигнала | 1986 |
|
SU1356229A1 |
| US 5369793 А, 29.11.1987 | |||
| US 5007068 А, 09.04.1991 | |||
| Способ водопонижения при проходке щитом шахтного ствола | 1971 |
|
SU546723A1 |

