Данное изобретение относится к области радиотехники, а конкретно к широкополосным сотовым системам радиосвязи, и, в частности, может быть использовано в прямом канале по стандартам UMTS и CDMA2000, для корректировки частоты опорного генератора, необходимой для когерентного приема сообщений.
Уровень техники
Известно, что в процессе работы системы широкополосной сотовой связи возможно рассогласование ΔF между несущей частотой принимаемого полезного сигнала и частотой опорного генератора мобильной станции. Это рассогласование (частотный сдвиг) может быть обусловлено доплеровским смещением частоты (из-за движения мобильной станции) и нестабильностью частоты опорных генераторов базовый и мобильной станций. В результате влияния расстройки частоты качество связи может существенно ухудшиться. Поэтому возникает проблема оценки этого частотного рассогласования Δ F в целях дальнейшей корректировки частоты опорного генератора мобильной станции для качественного приема сообщений. В любой системе связи после включения возникает расстройка частоты ΔF, причем априорный интервал возможных рассогласований частоты заранее известен и составляет [-Fmax, Fmax]. Для систем связи, организуемых в соответствии со стандартами UMTS и CDMA2000, Fmax составляет 11 кГц. В результате работы системы АПЧ расстройка частоты ΔF для этих систем должна быть уменьшена до значения ±150 Гц.
Наиболее часто используемыми являются фазовые методы автоподстройки частоты (системы ФАПЧ). Все ФАПЧ реализуют идею детектирования и фильтрации квазипостоянных фазовых изменений и использования полученной оценки для выработки сигнала коррекции. Дискриминационная характеристика цифрового фазового детектора является периодической и имеет пилообразную форму. Периодический характер дискриминационной характеристики является причиной возникновения захвата за ложную оценку частоты, если за счетный интервал времени произойдет сдвиг сигнала по фазе больше, чем на ±π/n, где n - кратность манипуляции при приеме фазоманипулированного сигнала. Для символов пилот-сигнала n = 1, т.к. они передаются всегда с одинаковой фазой; для символов передаваемой информации n = 4.
Принципиальные различия между всеми существующими методами ФАПЧ состоят в реализации операции оценивания постоянного сдвига фазы (преобразования сдвига фазы в измеряемый параметр), однозначно связанного с существующим сдвигом частоты. Поскольку одной оценки фазы в условиях шумов и фединга сигнала обычно оказывается недостаточно, для получения оценки сдвига частоты производят накопление и усреднение оценок. Длительность усреднения определяет точность формируемой оценки сдвига частоты и инерционность системы АПЧ в целом. Функция преобразования полученного сигнала оценки фазы в сигнал управления обычно представляет собой зависимость измеряемого параметра от частоты и оптимизируется в соответствии с требованием минимальной сложности исполнения.
Одним из наиболее простых способов оценки постоянного сдвига фазы сложного фазоманипулированного сигнала является выделение фазового сдвига между двумя последовательно принятыми комплексными символами и последующее их усреднение (см. Дж. Спилкер. "Цифровая спутниковая связь". М., Связь. 1978 г, стр. 387-404) [1]. Эту операцию можно реализовать как перемножение комплексного отсчета принятого сигнала с комплексно-сопряженным предыдущим с последующей фильтрацией полученной комбинационной составляющей. Данный подход является частным случаем n-кратного умножения входного сигнала с последующей фильтрацией n•ωo составляющей. Здесь n - кратность манипуляции несущей, ωo - частота несущей.
Во временной области средняя частота сигнала может быть оценена электронно-счетным частотомером путем подсчета числа положительных и отрицательных переходов сигнала через нулевой уровень за единицу времени (см. В.С.Первачев. "Радиоавтоматика". М. , Сов.радио, 1982 г.) [2]. Однако такая оценка средней частоты (через квазичастоту) всегда оказывается завышенной по отношению к среднему значению. Повышение точности оценки средней частоты возможно за счет применения алгоритма с использованием дробного дифференцирования сигнала во временной области, но в этом случае на порядок возрастает вычислительная сложность метода.
Известны способ и устройство для синхронизации приемника в цифровой системе связи, описанные в патенте US #4,938,906 "Frequency Estimation system", Jan. 8, 1991 [3]. Этот метод использует оценку частоты методом линейной регрессии, анализируя отсчеты фазы. При этом формируется оптимальное по методу наименьших квадратов решение. Данное устройство позволяет получать оценку сдвига частоты с высокой точностью, но обладает недостатком, общим для всех цифровых ФАПЧ, поскольку имеет ограничение на максимальный сдвиг фазы между анализируемыми отсчетами.
В рассматриваемых системах связи для расширения спектра сигнала используется модуляция передаваемых данных ортогональными кодовыми последовательностями и кодирование скремблирующим кодом. В результате модуляции и кодирования комплексные символы преобразуются в последовательность закодированных комплексных чипов информации. При приеме производят декодирование наложенных кодов и накопление (суммирование) декодированных чипов для получения переданного символа. Посредством декодирования и суммирования принимаемых чипов производится корреляционная обработка принятого сигнала. Отношение сигнал-шум для принимаемых чипов очень низкое, таким образом, получение достоверных оценок фазы сигнала возможно только после корреляционной обработки сигнала.
С другой стороны, как было отмечено выше, для всех цифровых ФАПЧ существует ограничение на максимальный сдвиг фазы между отсчетами ±π/n, где n - кратность манипуляции при приеме фазоманипулированного сигнала. При больших расстройках частоты фазовый сдвиг для принятых символов полезного сигнала будет превышать максимально допустимый, что не позволяет применять системы ФАПЧ для коррекции любых рассогласований частоты из заданного априорного интервала [-Fmax, Fmax].
Известен вариант построения системы АПЧ на основе частотного дискриминатора с использованием пары смежных фильтров. Основная идея, реализуемая при этом, состоит в нахождении центра тяжести энергетического спектра сигнала (см. У.Линдслей "Системы синхронизации в связи и в управлении". Сов.радио, 1979; [4] и Automatic frequency control using split-band signal strength measurements: Пат. США N 5487186, МКИ H 04 B 1/16. Scarpa Carl G.; Hitachi America, Ltd. - N 368747; Заявл. 4.1.95; Опубл. 23.1.96; НКИ 455.192.2) [5].
Данный способ позволяет управлять частотой гетеродина, который обеспечивает размещение спектра принимаемого сигнала по центру полосы пропускания приемника, без декодирования наложенных расширяющих последовательностей (т. е. без корреляционной обработки сигнала). Принимаемый сигнал делится между двумя смежными по частоте фильтрами, занимающими по половине полосы пропускания, и выполняется сравнение уровней сигналов в каждой из этих полос. Разностный сигнал используется для подстройки гетеродина таким образом, чтобы средняя частота принимаемого сигнала совпала со средней частотой полосы пропускания АПЧ приемника [5].
Недостатком этого подхода является необходимость построения двух фильтров высокого порядка и большом времени накопления для достижения достаточной точности оценивания.
Наиболее близким по технической сущности к предлагаемому способу автоподстройки частоты является способ и устройство, описанные в статье В.И. Тихонова "Оптимальный прием сигналов". М., Радио и связь, 1983 г, стр. 199, рис. 3.13, стр. 230, рис. 3.21 [6].
Такой способ автоподстройки частоты, заключается в том, что автоподстройку частоты осуществляют по результатам оценки частоты при помощи многоканального приемника, состоящего из n параллельных каналов, для этого:
- делят априорный интервал значений частот [-Fmax, Fmax] на n частотных подинтервалов с частотной полосой F каждый;
- в каждом из n частотных подинтервалов вычисляют корреляцию сигнала за время t, образуя n оценок корреляции, соответствующих серединам частотных подинтервалов Fi, где i может принимать значения от 1 до n;
- определяют модуль оценки корреляции;
- выбирают подинтервал с максимальным значением модуля оценки корреляции и вычисляют оценку сдвига частоты;
- осуществляют коррекцию частоты на величину полученной оценки.
Для реализации описанного способа может быть использовано устройство, представленное на фиг. 1.
Работает устройство следующим образом.
После декодирования ортогональных и скремблирующих кодовых последовательностей чипы принятого сигнала поступают на n перемножителей 2, где каждый чип умножается на комплексный отсчет генератора опорного сигнала ejFiτ, Fi - центральная частота подинтервала, τ - время. Таким образом, на выходе каждого из перемножителей формируется принятый сигнал со сдвигом по частоте, равным (Fi- ΔF).
В блоке формирования оценки 3 при помощи сумматора 5 производится когерентное накопление чипов информации за время t. Таким образом, формируется n оценок корреляции, соответствующих серединам частотных подинтервалов.
В блоке 6 определяют модуль оценки корреляции, который передается на устройство сравнения 4.
В устройстве сравнения 4 выбирается максимальный результат накопления и вычисляется оценка сдвига частоты, которая передается в опорный генератор аналогового демодулятора для коррекции частоты.
Однако использование параллельной схемы не представляется возможным из-за большой стоимости и габаритов устройства АПЧ, необходимых для достижения требуемой точности настройки частоты.
Сущность изобретения
Задача, которую решает заявляемое изобретение, заключается в создании способа автоподстройки частоты, обладающего высокой точностью оценки частоты во всем априорном интервале расстроек частоты [-Fmax, Fmax] при умеренных стоимостно-габаритных характеристиках конечного устройства.
Для решения этой задачи в способ автоподстройки частоты, заключающийся в том, что делят априорный интервал значений частот на n частотных подинтервалов с частотной полосой F каждый, в каждом из n частотных подинтервалов вычисляют корреляцию сигнала за время t, образуя n оценок корреляции, соответствующих серединам частотных подинтервалов, определяют модуль оценки корреляции, выбирают подинтервал с максимальным значением модуля оценки корреляции и вычисляют оценку сдвига частоты, осуществляют коррекцию частоты на величину полученной оценки, вводят новую последовательность операций, при которой процесс автоподстройки осуществляют последовательно в Q итераций, при этом на каждой последующей итерации сужают область неопределенности до достижения минимально допустимого интервала рассогласования частоты, на каждой итерации накапливают некогерентно квадраты модулей k оценок корреляции в каждом из частотных подинтервалов, где k зависит от величины допустимого интервала рассогласования частоты на следующей итерации, производят вычисление оценки сдвига частоты по частотному подинтервалу с максимальным результатом накопления, причем время t когерентного накопления оценок корреляции на i-ой итерации выбирают как меньшее из двух величин, одна из которых равна n/F, а другая равна интервалу стационарности канала.
Вторым вариантом решения поставленной задачи является то, что в способ автоподстройки частоты, заключающийся в том, что делят априорный интервал значений частот на n частотных подинтервалов с частотной полосой F каждый, в каждом из n частотных подинтервалов вычисляют корреляцию сигнала за время t, образуя n оценок корреляции, соответствующих серединам частотных подинтервалов, определяют модуль оценки корреляции, выбирают подинтервал, с максимальным значением модуля оценки корреляции и вычисляют оценку сдвига частоты, осуществляют коррекцию частоты на величину полученной оценки, дополнительно вводят новую последовательность операций, при которой автоподстройку частоты выполняют в два этапа, на первом этапе осуществляют последовательно Q итераций, при этом на каждой последующей итерации сужают область неопределенности до достижения максимально допустимого интервала рассогласования частоты для второго этапа, на каждой итерации накапливают некогерентно квадраты модулей k оценок корреляции в каждом из частотных подинтервалов, где k зависит от величины допустимого интервала рассогласования частоты на следующей итерации, и производят вычисление оценки сдвига частоты по частотному подинтервалу с максимальным результатом накопления, причем время t когерентного накопления оценок корреляции на i-ой итерации выбирают как меньшее из двух величин, одна из которых равна n/F, а другая равна интервалу стационарности канала, на втором этапе сужают область неопределенности до минимально допустимого интервала рассогласования частоты и выполняют слежение за частотой, циклически повторяя итерации автоподстройки частоты, причем на каждой итерации вычисляют корреляцию сигнала за время t1, меньшее интервала стационарности канала, образуя оценки корреляции, вычисляют фазу оценок корреляции, проводят сглаживание фазы оценок, исключая большие скачки фазы, используя фазы оценок, формируют решающую дискретную функцию, у которой оценивают линейный наклон и определяют величину рассогласования частоты, осуществляют коррекцию частоты на величину полученной оценки.
Кроме того, сглаживание фазы оценок производят методом запрета разностей фаз текущего и предыдущего символов, более чем на π, а оценку линейного наклона определяют методом наименьших квадратов.
Конструктивно вышеизложенное решение технической задачи реализуется за счет того, что разработано устройство автоподстройки частоты соответственно для каждого варианта реализации заявляемого способа.
Устройство автоподстройки частоты, по первому варианту, содержащее первый блок оценки частоты, в состав которого входят n параллельных частотных каналов, каждый канал состоит из последовательно соединенных перемножителя и блока формирования оценки, содержащего первый сумматор, выход блока формирования оценки каждого частотного канала соединен с соответствующим входом блока сравнения, выход которого является выходом устройства, первые входы перемножителей объединены и являются информационным входом устройства, вторые входы перемножителей соединены с выходами генератора опорного сигнала, первый вход первого сумматора соединен с выходом перемножителя, при этом дополнительно введены блок управления, второй блок оценки частоты, а в блок формирования оценки каждого из n частотных каналов первого блока оценки частоты дополнительно введены последовательно соединенные блок вычисления квадрата модуля, вход которого соединен с выходом первого сумматора, делитель, второй сумматор, выход которого является выходом блока формирования оценки, причем вторые входы первых сумматоров каждого из n частотных каналов объединены со вторыми входами делителей и соединены со вторым управляющим выходом блока управления, вторые входы вторых сумматоров всех n частотных каналов объединены со входом генератора опорного сигнала и соединены с первым управляющим выходом блока управления.
В устройство автоподстройки частоты, по второму варианту, содержащее первый блок оценки частоты, в состав которого входят n параллельных частотных каналов, каждый канал состоит из последовательно соединенных перемножителя и блока формирования оценки, содержащего первый сумматор, выход блока формирования оценки каждого частотного канала соединен с соответствующим входом блока сравнения, выход которого является выходом устройства, первые входы перемножителей объединены и являются информационным входом устройства, вторые входы перемножителей соединены с выходами генератора опорного сигнала, первый вход первого сумматора соединен с выходом перемножителя, дополнительно введены блок управления, второй блок оценки частоты, а в блок формирования оценки каждого из n частотных каналов первого блока оценки частоты дополнительно введены последовательно соединенные блок вычисления квадрата модуля, вход которого соединен с выходом первого сумматора, делитель, второй сумматор, выход которого является выходом блока формирования оценки, причем вторые входы первых сумматоров каждого из n частотных каналов объединены со вторыми входами делителей и соединены со вторым управляющим выходом блока управления, вторые входы вторых сумматоров всех n частотных каналов объединены со входом генератора опорного сигнала и соединены с первым управляющим выходом блока управления, кроме того второй блок оценки частоты содержит последовательно соединенные третий сумматор, блок формирования фазы, блок сглаживания фазы, блок оценки частотного сдвига, блок усреднения, причем первый вход третьего сумматора является информационным входом второго блока оценки частоты, второй вход третьего сумматора и второй вход блока усреднения соединены с третьим управляющим входом блока управления.
Сопоставительный анализ первого варианта способа автоподстройки частоты с прототипом показывает, что предлагаемое изобретение существенно отличается от прототипа, так как поэтапное сужение области неопределенности до минимально допустимого интервала рассогласования частоты, изменение времени накопления оценок корреляции на i-ой итерации в зависимости от величины априорного интервала значений частот на данной итерации позволяет получить более высокую точность оценки.
Сопоставительный анализ второго варианта способа автоподстройки частоты с прототипом показывает, что предлагаемое изобретение также существенно отличается от прототипа, так как поэтапное сужение области неопределенности до минимально допустимого интервала рассогласования частоты, изменение времени накопления оценок корреляции на i-ой итерации в зависимости от величины априорного интервала значений частот на данной итерации и использование второго этапа для более точной настройки частоты путем сужения области неопределенности до минимально допустимого интервала рассогласования частоты, слежение за частотой позволяет значительно повысить точность оценки.
Сопоставительный анализ заявляемых вариантов способа с другими известными техническими решениями в данной области техники не выявил более раннего описания признаков, заявленных в отличительной части формулы изобретения, а это позволяет утверждать, что заявляемый способ автоподстройки частоты отвечает критериям новизны и изобретательского уровня.
Сравнение заявляемого устройства автоподстройки частоты (по первому и второму вариантам реализации) с другими известными техническими решениями в данной области техники не позволило выявить более раннего описания признаков, заявленных в отличительной части формулы изобретения, что свидетельствует о наличии в заявляемом изобретении элементов новизны, изобретательского уровня и промышленной применимости.
Описании фигур чертежей
На фиг. 1 приведена блок-схема устройства, выбранного в качестве прототипа. Элементами схемы являются:
1 - генератор комплексных отсчетов гетеродина для всех n каналов;
2 - комплексный перемножитель принятых чипов и комплексных отсчетов генератора опорного сигнала;
3 - устройство вычисления модуля оценки корреляции для данного частотного подинтервала;
4 - устройство сравнения полученных оценок корреляции и генерирования сигнала управления для коррекции частотного рассогласования;
5 - комплексный сумматор принятых чипов;
6 - устройство вычисления модуля комплексного числа.
На фиг. 2 приведена блок-схема заявляемого устройства (вариант 1). Элементами этой схемы являются:
7 - блок управления;
8 - блок оценки частоты.
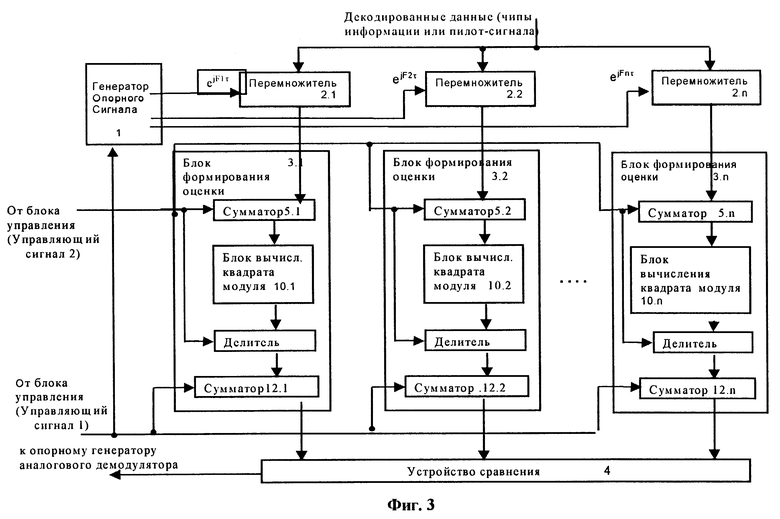
На фиг. 3 приведена схема первого блока оценки частоты. На схеме показаны:
1 - генератор комплексных отсчетов гетеродина для всех n каналов;
2 - комплексный перемножитель;
3 - блок формирования оценки M(Fi) для данного частотного подинтервала;
4 - устройство сравнения полученных оценок M(Fi) и генерирования сигнала управления для коррекции частотного рассогласования;
5 - комплексный сумматор;
10 - устройство вычисления квадрата модуля комплексного числа;
11 - блок взвешивания j-ой оценки корреляции (делитель),
12 - блок некогерентного накопления k оценок корреляции (сумматор).
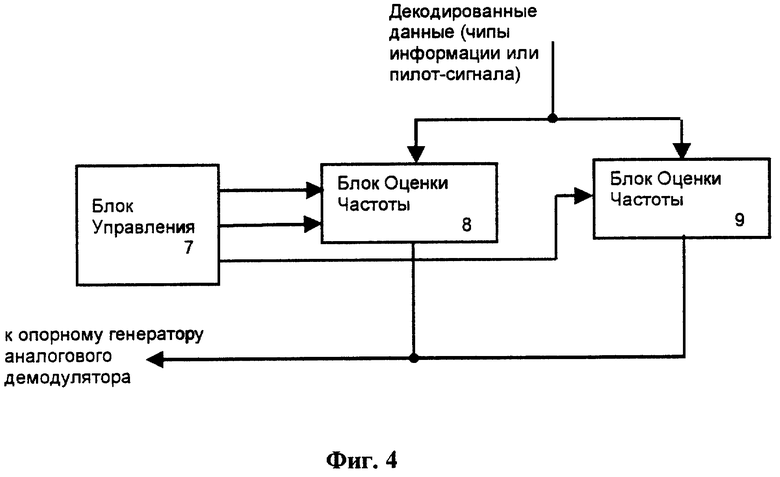
На фиг. 4 приведена блок-схема заявляемого устройства по второму варианту реализации. На схеме показаны:
7 - блок управления;
8 - блок оценки частоты;
9 - блок оценки частоты (дополнительный).
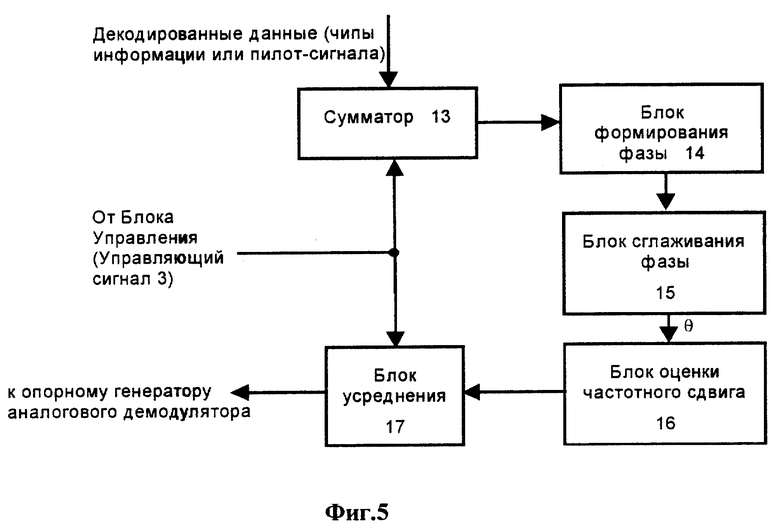
На фиг. 5 приведена структура блока оценки частоты 9, где обозначено:
13 - комплексный сумматор;
14 - блок определения фазы комплексного числа;
15 - блок исключения скачков фазы на ±π;
16 - блок оценки частотного сдвига методом линейной регрессии;
17 - блок усреднения.
На фиг. 6 иллюстрируется принцип параллельно-последовательного анализа сдвига частоты. Истинное значение сдвига частоты показано пунктирной вертикальной линией.
Предпочтительный вариант реализации изобретения
Заявляемый способ заключается в применении квазиоптимального алгоритма, который представляет собой модифицированную многоканальную схему, основанную на оптимальных решающих функциях. При этом используют последовательно-параллельную пошаговую процедуру:
- автоподстройку частоты осуществляют последовательно за Q итераций, при этом на каждой последующей итерации сужают область неопределенности до минимально допустимого интервала рассогласования частоты, причем на каждой итерации:
- делят априорный интервал значений частот на n частотных подинтервалов с частотной полосой F каждый;
- в каждом из n частотных подинтервалов вычисляют корреляцию сигнала за время t, образуя n оценок корреляции, соответствующих серединам подинтервалов, причем время t когерентного накопления оценок корреляции на i-ой итерации выбирают как меньшее из двух величин, одна из которых равна n/F, а другая равна интервалу стационарности канала;
- определяют модуль оценки корреляции;
- накапливают модули k оценок корреляции, k зависит от величины допустимого интервала рассогласования частоты на следующей итерации;
- выбирают частотный подинтервал, у которого результат накопления имеет максимальное значение, и вычисляют оценку сдвига частоты;
- осуществляют коррекцию частоты на величину полученной оценки.
Другим вариантом предлагаемого способа автоподстройки частоты является способ, заключающийся в том, что на первом этапе устраняют большие расстройки частоты параллельно - последовательно за Q итераций, сужая область неопределенности до максимально допустимого интервала рассогласования частоты на втором этапе, причем на каждой итерации
- делят априорный интервал значений частот на n частотных подинтервалов с частотной полосой F каждый;
- в каждом из n частотных подинтервалов вычисляют корреляцию сигнала за время t, образуя n оценок корреляции, соответствующих серединам подинтервалов, причем время t когерентного накопления оценок корреляции на i-ой итерации выбирают как меньшее из двух величин, одна из которых равна n/F, а другая равна интервалу стационарности канала;
- определяют модуль оценки корреляции;
- накапливают модули k оценок корреляции, k зависит от величины допустимого интервала рассогласования частоты на следующей итерации;
- выбирают частотный подинтервал, у которого результат накопления имеет максимальное значение и вычисляют оценку сдвига частоты;
- осуществляют коррекцию частоты на величину полученной оценки.
Затем на втором этапе производят точную настройку частоты, сужая область неопределенности до минимально допустимого интервала рассогласования частоты, и слежение за частотой, выполняя циклически повторяющиеся итерации, причем на каждой итерации
- вычисляют корреляцию сигнала за время t1, меньшее интервала стационарности канала, образуя оценки корреляции,
- вычисляют фазу оценок корреляции,
- проводят сглаживание фазы оценок, исключая большие скачки фазы,
- используя фазы оценок, формируют решающую дискретную функцию, у которой оценивают линейный наклон и определяют величину рассогласования частоты,
- осуществляют коррекцию частоты на величину полученной оценки.
Для реализации первого и второго вариантов способа были, в частности, использованы устройства, представленные соответственно на фиг. 2 и 4. Устройство АПЧ для первого варианта реализации включает в себя блок оценки частоты 8, представляющий собой модифицированную многоканальную схему, основанную на оптимальных решающих функциях.
При реализации второго способа автоподстройки частоты алгоритм работы устройства АПЧ состоит из двух этапов с использованием двух блоков оценки частоты 8 и 9, которые включают по очереди для подстройки частоты на первом и втором этапах соответственно. Работу блоков 8 и 9 в обоих случаях осуществляют под контролем блока управления при помощи трех управляющих сигналов.
При реализации первого способа автоподстройки частоты при помощи блока 8 за Q итераций область неопределенности сужают до минимально допустимого интервала рассогласования частоты. Схематично принцип последовательно-параллельной подстройки частоты представлен на фиг. 6.
На первом шаге весь априорный интервал [-Fmax, Fmax] делят на n подинтервалов и параллельно формируют n величин максимизированного логарифма функционала отношения правдоподобия, соответствующих серединам подинтервалов, в соответствии со следующей решающей функцией:
где i - номер частотного подинтервала, принимающий значения от 1 до n;
M(Fi) - результат накопления квадрата модулей k оценок корреляции в каждом из частотных подинтервалов i, соответствующий серединам частотных подинтервалов Fi;
k - количество накапливаемых оценок корреляции;
tj - время когерентного накопления j-ой оценки корреляции,
Xi,jRe, Xi,jIm - реальная и мнимая часть когерентного накопления принятых чипов по i-му каналу для j-ой оценки корреляции.
Далее выбирают подинтервал, у которого значение (1) максимально. По окончании каждого шага оценивания полученное значение оценки передают в опорный генератор аналогового демодулятора для его сложения с текущим значением частоты генератора. На следующем шаге выбранный подинтервал вновь делят на n частей и цикл оценки и коррекции частоты повторяют снова.
Проведя Q таких итераций, априорный интервал возможных значений частотного сдвига [-Fmax, Fmax] снижают до размеров, удовлетворяющих заданной допустимой погрешности оценивания. Чтобы не было проблем с ситуацией, когда истинное значение частотного сдвига лежит вблизи границы между подинтервалами, на каждом шаге подинтервалы выбирают с перекрытием. При этом априорный интервал от шага к шагу уменьшают не в n, а в меньшее число раз.
На каждой из Q итераций время когерентного накопления оценок корреляции t = tj выбирают как меньшее из двух величин, одна из которых равна n/F, а другая равна интервалу стационарности канала. Выбор необходимо производить с учетом интервала ортогональности принимаемого сигнала по следующей причине.
Особенностью стандарта UMTS является временное разделение пилот-символов и символов информации. Если интервал стационарности канала больше интервала ортогональности, то для символов пилот-сигнала, передаваемых всегда с одинаковой фазой, можно проводить когерентное накопление нескольких символов. Между тем фаза принимаемых символов информации априори не определена, поскольку для передачи информации используется 4-фазная манипуляция сигнала. Таким образом, при приеме символов информации длительность когерентного накопления не может превышать длительности символа. Введение в знаменателе выражения (1) времени когерентного накопления tj позволяет формировать оценку M(Fi) по всему потоку принимаемых данных, проводя некогерентное взвешенное суммирование когерентно накапливаемых символов пилот-сигнала и символов информации.
В стандарте CDMA2000 существует постоянно передаваемый пилот-сигнал, что позволяет устанавливать время когерентного накопления t = tj постоянным на каждой итерации в соответствии с приведенным выше правилом.
На фиг. 3 демонстрируется схема устройства по первому варианту.
Блок оценки частоты 8 содержит n параллельных частотных каналов. Каждый канал содержит последовательно соединенные перемножитель 2 и блок формирования оценки 3. Первые входы перемножителей 2 объединены и являются первым информационным входом устройства автоподстройки частоты. Вторые входы перемножителей 2 соединены с выходами генератора опорного сигнала 1. Выходы блоков формирования оценки 3 соединены со входами блока сравнения 4, выход которого является выходом устройства автоподстройки частоты. Каждый блок формирования оценки 3 содержит последовательно соединенные первый сумматор 5, блок вычисления квадрата модуля 10, делитель 11, второй сумматор 12. Первые входы первых сумматоров 5 соединены с выходами перемножителей 2. Вторые входы первых сумматоров 5 объединены со вторыми входами делителей 11 и соединены со вторым выходом блока управления 7 (фиг. 2). Вторые входы вторых сумматоров 12 объединены со входом генератора опорного сигнала 1 и соединены с первым выходом блока управления 7 (фиг. 2).
Работает устройство следующим образом.
В начале каждой из Q итераций при помощи управляющего сигнала 1 из блока управления 7 передается номер итерации, в соответствии с которым в генераторе опорного сигнала 1 устанавливаются частоты Fi, а в сумматоре 12 устанавливается количество некогерентно накапливаемых оценок k.
Чипы принятого сигнала после декодирования ортогональных и скремблирующих кодовых последовательностей поступают на n комплексных перемножителей 2, где каждый чип умножается на комплексный отсчет генератора опорного сигнала ejFiτ; Fi - центральная частота подинтервала, τ - время. Таким образом, на выходе каждого из перемножителей формируется принятый сигнал, сдвинутый по частоте на величину (Fi-ΔF).
В блоке 3 производится формирования оценки M(Fi) для данного частотного подинтервала в соответствии с решающей функцией (1). Для этого при помощи сумматора 5 производится когерентное накопление чипов информации за время t = tj, задаваемое из блока управления при помощи управляющего сигнала 2.
В блоке 10 вычисляют квадрат модуля накопленной когерентной суммы за время t (квадрат оценки корреляции). После этого данные передаются в делитель 11, где производится взвешивание полученной величины. Для этого вычисляют отношения квадрата модуля комплексного числа, накопленного за время t = tj, к длительности интервала когерентного накопления tj.
Сумматор 12 предназначен для некогерентного накопления k взвешенных квадратов оценки корреляции и формирования, таким образом, значения решающей функции M(Fi) для данного частотного подинтервала.
В устройстве сравнения выбирается максимальная из полученных оценок M(Fi) и вычисляется оценка сдвига частоты, которая передается в опорный генератор аналогового демодулятора для коррекции частоты.
Для организации режима слежения при помощи последовательно-параллельной структуры необходимо повторять последний (самый точный) шаг оценки частоты и проводить подстройку по результатам анализа. В режиме слежения целесообразно перестраивать параллельные каналы так, чтобы канал, соответствующий оценке, постоянно располагался посередине.
Таким образом данное устройство автоподстройки частоты реализует в себе оба этапа анализа частотного рассогласования: как грубую, так и точную подстройку частоты.
При реализации второго способа АПЧ блок 8 используют на первом этапе автоподстройки частоты для устранения больших расстроек частоты. При этом за Q итераций область неопределенности сужают до максимально допустимого интервала рассогласования частоты на втором этапе.
После коррекции больших рассогласований частоты блок управления 7 включает блок оценки частоты 9, при помощи которого производится окончательная (точная) подстройка частоты и слежение за частотой в процессе работы мобильной станции. Устройство АПЧ работает непрерывно, осуществляя одинаковые циклы (итерации) оценки и коррекции частотного сдвига.
Структура блока оценки частоты 9 приведена на фиг. 5.
Блок оценки частоты 9 содержит последовательно соединенные третий сумматор 13, блок формирования фазы 14, блок сглаживания фазы 15, блок оценки частотного сдвига 16, блок усреднения 17, причем первый вход третьего сумматора 13 является информационным входом второго блока оценки частоты 9, второй вход третьего сумматора 13 и второй вход блока усреднения 17 соединены с третьим управляющим входом блока управления 7 (фиг. 4).
Работает устройство следующим образом.
Для оценки частоты в блоке 9 используется фазовая структура принимаемого сигнала. Чипы принятого сигнала после декодирования ортогональных и скремблирующих кодовых последовательностей поступают на вход сумматора 13, где осуществляется их когерентное накопление за время t1 для формирования оценок корреляции. Время t1 задается при помощи управляющего сигнала 3 из блока управления. Оно всегда меньше интервала стационарности канала. Для полученной оценки корреляции в блоке 14 вычисляется фаза 
Поскольку полные фазы  принимают значения лишь из интервала [-π,π], в блоке 15 проводится операция сглаживания, в результате чего исключаются большие скачки фазы (порядка 2π), обусловленные ограниченным интервалом. Данная операция может быть реализована различными методами. Наиболее простой и адаптированный к большим частотным расстройкам алгоритм сглаживания основан на запрете разностей фаз текущего и предыдущего символов более чем на π. Значения фазы после сглаживания передаются в блок 16, где производится оценка частотного сдвига.
принимают значения лишь из интервала [-π,π], в блоке 15 проводится операция сглаживания, в результате чего исключаются большие скачки фазы (порядка 2π), обусловленные ограниченным интервалом. Данная операция может быть реализована различными методами. Наиболее простой и адаптированный к большим частотным расстройкам алгоритм сглаживания основан на запрете разностей фаз текущего и предыдущего символов более чем на π. Значения фазы после сглаживания передаются в блок 16, где производится оценка частотного сдвига.
Обозначим фазы после сглаживания  N - число наблюдаемых оценок корреляции (интервал анализа). В отсутствие фединга и помех после сглаживания была бы получена линейно возрастающая или линейно убывающая (в зависимости от знака частотной расстройки) дискретная функция.
N - число наблюдаемых оценок корреляции (интервал анализа). В отсутствие фединга и помех после сглаживания была бы получена линейно возрастающая или линейно убывающая (в зависимости от знака частотной расстройки) дискретная функция.
Для оценки линейного наклона, однозначно связанного с частотным сдвигом, используют метод наименьших квадратов, что эквивалентно использованию метода максимального правдоподобия в гауссовском приближении. Формирование оценки имеющегося на данный момент частотного сдвига Ω производят в соответствии со следующим выражением:
где  - временные положения середин интервалов в новой системе координат, связанной с центром интервала анализа следующим выражением:
- временные положения середин интервалов в новой системе координат, связанной с центром интервала анализа следующим выражением:
В выражении (3) для всех ti справедливо равенство ti - ti-1 = ti.
Усреднив полученную оценку по множеству интервалов анализа в блоке 17, получают окончательную оценку частотного сдвига, которая используется для коррекции частоты опорного генератора. Множество интервалов анализа определяется длительностью итерации оценки частоты.
Поскольку время t1 в общем случае является переменным, управляющий сигнал 3 из блока управления 7 используют в блоке 17 для учета времени когерентного накопления t1, что позволяет не изменять алгоритм функционирования блоков 14, 15 и 16.
Представленные решения проблемы автоподстройки частоты сочетают в себе возможность точной подстройки частоты при умеренных затратах на их реализацию. При этом время автоподстройки, при заданной точности конечной настройки частоты, незначительно превышает время анализа и коррекции частоты при использовании многоканального приемника, особенно при применении первого варианта реализации устройства. Второй вариант построения системы АПЧ позволяет совместить в одном устройстве высокую точность настройки частоты, характерную для систем ФАПЧ, и возможность автоподстройки частоты при больших начальных расстройках частоты, коррекция которых с использованием только фазовых методов оценки частоты оказывается невозможной. Предлагаемые варианты реализации АПЧ позволяют проводить точную настройку частоты опорного генератора даже при очень низком отношении сигнал-шум для принимаемого сигнала.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ЧАСТОТЫ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 1999 |
|
RU2157050C1 |
| СПОСОБ ПОИСКА ШИРОКОПОЛОСНОГО СИГНАЛА (ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2178620C2 |
| СПОСОБ АДАПТИВНОГО КВАЗИКОГЕРЕНТНОГО МНОГОЛУЧЕВОГО ПРИЕМА В ПРЯМОМ КАНАЛЕ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2178955C2 |
| Устройство высокоточной оценки несущей частоты сигнала в широкополосных системах связи | 2018 |
|
RU2691380C1 |
| Способ высокоточной оценки несущей частоты сигнала в широкополосных системах связи | 2018 |
|
RU2691972C1 |
| СПОСОБ КОГЕРЕНТНОГО ПРИЕМА С РЕШАЮЩЕЙ ОБРАТНОЙ СВЯЗЬЮ | 1999 |
|
RU2168275C2 |
| СПОСОБ И УСТРОЙСТВО КОГЕРЕНТНОГО ПРИЕМА В ОБРАТНОМ КАНАЛЕ CDMA ПО IS-95 | 1999 |
|
RU2209526C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВРЕМЕННОГО И ЧАСТОТНОГО РАССОГЛАСОВАНИЯ СИГНАЛОВ БАЗОВЫХ СТАНЦИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2216856C2 |
| СПОСОБ АВТОПОДСТРОЙКИ ЧАСТОТЫ ОПОРНОГО СИГНАЛА ПРИЕМНОЙ СТАНЦИИ, СПОСОБ ОЦЕНИВАНИЯ РАССТРОЙКИ ЧАСТОТЫ СИГНАЛОВ ЛУЧЕЙ ОТНОСИТЕЛЬНО ЧАСТОТЫ ОПОРНОГО СИГНАЛА, УСТРОЙСТВО АВТОПОДСТРОЙКИ ЧАСТОТЫ ОПОРНОГО СИГНАЛА ПРИЕМНОЙ СТАНЦИИ | 2005 |
|
RU2286015C1 |
| СПОСОБ ЧАСТОТНО-ВРЕМЕННОЙ СИНХРОНИЗАЦИИ СИСТЕМЫ СВЯЗИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2304359C2 |


Изобретение относится к радиотехнике и может использоваться в широкополосных сотовых системах радиосвязи для корректировки частоты опорного генератора, необходимой для когерентного приема сообщений. В двух вариантах способов автоподстройки частоты используют Q последовательных итераций, а время t когерентного накопления оценок корреляции на i-ой итерации выбирают как меньшее из двух величин, одна из которых равна n/F, а другая равна интервалу стационарности канала. Во втором варианте производят на первом этапе те же операции, что и в первом варианте, а затем для точной автоподстройки анализируют отсчеты фазы. Устройства автоподстройки частоты по первому и второму вариантам содержат первый блок оценки частоты, в состав которого входят n параллельных частотных каналов, каждый из которых содержит перемножители и блок формирования оценки. Устройство автоподстройки частоты по второму варианту содержит дополнительно блок управления, второй блок оценки частоты, в который дополнительно введены сумматор, блок формирования фазы, блок сглаживания фазы, блок оценки частотного сдвига и блок усреднения. Достигаемый технический результат - точная настройка частоты даже при очень низком отношении сигнал/шум для принимаемого сигнала. 4 с.п.ф-лы, 6 ил.
4. Способ по п.2, отличающийся тем, что оценку линейного наклона определяют методом наименьших квадратов.
| ТИХОНОВ В.И., КУЛЬМАН К.К | |||
| Нелинейная фильтрация и квазикогерентный прием сигналов | |||
| - М.: Советское радио, 1975, с.620 | |||
| Устройство дискретной автоподстройки частоты | 1989 |
|
SU1688408A1 |
| Устройство фазовой автоподстройки частоты | 1990 |
|
SU1829115A1 |
| Устройство для автоподстройки частоты | 1988 |
|
SU1653159A1 |
| US 5539357 A, 23.07.1996 | |||
| УСТРОЙСТВО ДЛЯ ПРОПИТКИ СТАЛЬНОГО КАНАТА | 1999 |
|
RU2173365C2 |

