Изобретение относится к области радиотехники, в частности к способу и устройству приема многолучевого сигнала, и может быть использовано в системах связи с подвижными объектами.
В системах связи с подвижными объектами каналы распространения сигнала между приемником и передатчиком данных являются многолучевыми и нестационарными. Обычно, многолучевость канала распространения в мобильных системах связи учитывают посредством суммирования энергии компонент многолучевого сигнала в Rake-приемнике. Сигнал каждого луча принимается отдельным однолучевым приемником, содержащим, в том числе, блок временной синхронизации. Этот подход является эффективным при наличии нескольких хорошо разрешаемых компонент многолучевого сигнала, т.е. отстоящих друг от друга по времени на несколько чипов. Чип ПСП - это длительность одного элементарного временного интервала псевдослучайной последовательности. Однако нередко частотно-селективный фединг носит такой характер, что компоненты многолучевого сигнала являются неразрешаемыми (разность временных положений сигналов соседних лучей меньше чипа ПСП).
Из-за неверной оценки числа компонент многолучевого сигнала имеют место энергетические потери и ухудшение качества демодуляции как при отсутствии, так и при наличии фединга. Эти потери обусловлены неоптимальной обработкой сигнала, содержащего неразрешаемые лучи. Очевидно, работа эффективной системы слежения и демодуляции в условиях неразрешаемой многолучевости должна отличаться от работы известных устройств.
В процессе работы системы слежения приемного устройства возможно обнаружение сигналов нескольких лучей. Вследствие влияния сигналов лучей друг на друга искажаются потоки данных, по которым осуществляется оценка комплексной огибающей (восстановление несущей) сигналов каждого луча. Это должно учитываться при приеме данных.
Эффективность системы связи во многом определяется способностью алгоритмов временной синхронизации обеспечить необходимую точность оценки числа и временных положений компонент многолучевого сигнала в многолучевых нестационарных каналах, а алгоритмов восстановления несущей - обеспечить высокую точность оценки комплексной огибающей сигналов найденных компонент многолучевого сигнала.
Проблема синтеза и анализа алгоритмов слежения за временной задержкой однолучевого сигнала (независимой компоненты многолучевого сигнала) решалась в течение нескольких последних десятилетий многими авторами (см., например, Riccardo De Gaudenzi «Direct-Sequence Spread-Spectrum Chip Tracking in the Presence, of Unresolvable Multipath Components», IEEE Trans. Veh. Tech., vol.48, pp.1573-1583, Sept. 1999 [1] и G.Proakis «Digital Communications», McGraw-Hill, 3rd Edition, 1995 [2]). Разработанные в результате этих исследований алгоритмы, реализующие слежение за временной задержкой однолучевого сигнала в системах, включают процедуры формирования оценки временной ошибки синхронизации и последующей ее коррекции. Как правило, данные процедуры реализуются в аналоговом или цифровом виде на базе систем автоматического управления, в которых временная синхронизация осуществляется с использованием управляющей обратной связи или без нее.
Одна из осуществленных на практике систем некогерентного слежения за одним кодовым сигналом описана в статье М.К.Simon, J.К.Omura, R.A.Scholtz, and В.К.Levitt «Spread Spectrum Communications», Electrical Engineering Communications and Signal Processing, volume III, 1985 [3]. Система слежения содержит дискриминатор, управляемый генератор опорного сигнала (генератор ПСП) и ветви демодуляции данных. Дискриминатор включает два квадратурных коррелятора, два квадратора и схему вычисления разности. Каждый из квадратурных корреляторов состоит из канального квадратурного перемножителя и фильтра. Ветвь выделения данных включает коррелятор и детектор данных. Устройство, выполненное таким образом, корректирует ошибку слежения временного сдвига между принимаемым и опорным сигналом и не чувствительно к случайной начальной фазе входного сигнала. Для формирования сигнала ошибки слежения на перемножитель первого коррелятора дискриминатора подают опорный сигнал с опережением на некоторый временной интервал Δ относительно текущей временной позиции, а на второй - с запаздыванием на временной интервал Δ. В результате на выходе схемы вычисления разности формируется сигнал ошибки, соответствующий временному рассогласованию между входным и опорным сигналом, который используется для коррекции временных задержек генератора ПСП.
Существуют различные модификации описанного устройства и алгоритма его реализации. Например, Richard A. Yost and Robert W. Boyd в своем докладе «A modified pn code tracking loop: Its performance analysis and comparative evaluation», IEEE Transactions on Communications, COM-30(5): 1027-36, May 1982 [4] предложили модифицированный алгоритм слежения за одним кодовым сигналом. Преимущество этого алгоритма в том, что для его реализации необходимо меньшее число стандартных блоков. С другой стороны, такое техническое решение весьма чувствительно к оценке фазы входного сигнала, что приводит к снижению устойчивости работы.
Недостатком известных систем слежения за задержкой сигнала является то, что при слежении отдельными приемниками за близко расположенными компонентами многолучевого сигнала вероятен захват обоими приемниками одной компоненты, в то время как другая компонента (более слабая) перестает отслеживаться. Это приводит к энергетическим потерям. Кроме того, в случае неразрешаемой многолучевости возникает большой джиггер сигнала ошибки слежения, что снижает устойчивость системы слежения и также вызывает энергетические потери.
Известен подход, направленный на преодоление недостатков упомянутых выше способов слежения. Он заключается в том, что приемники отслеживают компоненты многолучевого сигнала таким образом, чтобы не допустить их сближения на расстояние, меньшее некоторого минимально допустимого (см., например, опубликованную международную заявку WO 97/28608 «Method and Arrangement of Signal Tracking and a Rake-receiver Utilizing Said Arrangement», 07.08.97 [5] и патент США №6345078 B1, Feb.5, 2002, «Finger assignment system for a multiple finger receiver and method thereof» [6]).
В [5] описан способ приема многолучевого сигнала с неразрешаемыми компонентами. Система, реализующая предложенный способ, состоит из приемника поиска, системы слежения за компонентами обнаруженного сигнала, управляющего процессора и RAKE приемника. Алгоритм, который используется в процедуре слежения, заключается в следующем. Если компоненты не разрешаются, и решающая функция имеет унимодальную форму, то для выполнения процедуры слежения и демодуляции используется отдельная схема слежения за задержкой сигнала, соответствующей временной позиции максимума решающей функции.
Если решающая функция суммарного неразрешаемого сигнала имеет полимодальную форму, то процедура подстройки начинается с системы слежения приемника, демодулирующего максимальную компоненту многолучевого сигнала. Для других компонент эта процедура выполняется таким образом, чтобы временной сдвиг между опорными сигналами любых двух демодуляторов не был меньше некоторой заранее заданной величины Тmin. В [5] предложены три различные стратегии реализации данного условия.
Способ слежения за многолучевым сигналом, запрещающий сближение временных позиций соседних приемников, не решает основную проблему слежения в условиях неразрешаемой многолучевости, которая заключается в определении числа компонент многолучевого сигнала. Реально расстояние между сигналами соседних лучей может быть меньше заданного минимального расстояния между приемниками. Ошибка в определении числа неразрешаемых компонент может приводить к существенным энергетическим потерям.
Другой известный способ слежения за сигналом с неразрешаемой многолучевостью (см. Volker Aue and Gerhard P. Fettweis «A Noncoherent Tracking Scheme for the RAKE Receiver That Can Cope With Unresolvable Multipath», ICC '99, Vancouver, Canada, June, 1999 [7] и патент США №6, 381, 264 B1, Apr.30, 2002 «Efficient multipath centroid tracking circuit for a code division multiple access (CDMA) system» [8]) заключается в синхронном управлении всеми однолучевыми приемниками, установленными в области многолучевости. Способ основан на формировании суммарной ошибки слежения для всех однолучевых приемников. Полученная суммарная ошибка слежения используется для однонаправленной подстройки временных позиций всех однолучевых приемников.
В [7] предложена некогерентная схема слежения RAKE приемника для неразрешаемых компонент многолучевого сигнала и выполнен ее анализ. Описанная система слежения за временными задержками содержит несколько приемников, каждый из которых содержит коррелятор и блок оценки ошибок временного слежения. Если расстояние между компонентами многолучевого сигнала велико по сравнению с длительностью чипа, то приемники отслеживают компоненты многолучевого сигнала независимо.
Если расстояние между компонентами многолучевого сигнала приблизительно равно длительности чипа или меньше его, то для этих лучей выделяется группа равноотстоящих приемников, расставленных друг относительно друга на некоторое фиксированное расстояние. Слежение для каждой группы приемников проводится при сохранении относительного временного интервала между приемниками.
Недостаток совместной подстройки совокупности приемников состоит в незнании числа компонент многолучевого сигнала (эта проблема не решается в рамках процедуры слежения). В случае частой (ближе, чем 1 чип) расстановки приемников в области многолучевости требуется большое число приемников. А в случае редкой расстановки появляются энергетические потери, о которых упомянуто выше. Кроме того, сигналы лучей могут дрейфовать разнонаправлено, что не может быть отслежено при совместной подстройке.
Наиболее близким техническим решением к заявляемым способу квазикогерентного приема многолучевых сигналов и устройству для его осуществления являются способ и устройство для его осуществления, описанные в статье Gunnar Fock, Jens Baltersee, Peter Schulz-Rittich, and Heinrich Meyr «Channel Tracking for Rake Receivers in Closely Spaced Multipath Environments», IEEE Journal, On Selected Areas hi Communications, Vol., 19, No. 12, December 2001 [9].
Способ-прототип заключается в следующем:
проводят поиск компонент многолучевого сигнала и определяют начальную оценку их временных позиций.
осуществляют интерполяцию входного сигнала, в результате увеличивая частоту дискретизации входного сигнала;
для каждой компоненты:
задерживают входной сигнал в соответствии с оценкой временной позиции компоненты,
формируют комплексные корреляционные отклики символов сигнала, а также запаздывающие и опережающие комплексные корреляционные отклики символов,
формируют разность запаздывающих и опережающих комплексных корреляционных откликов символов сигнала,
формируют ошибку слежения компоненты, последовательно перемножая сформированную разность на комплексно сопряженную оценку комплексной огибающей символа компоненты и на комплексно сопряженную оценку информационного параметра символа,
корректируют ошибку слежения компоненты, вычитая из полученного произведения мешающее влияние других компонент,
фильтруют по нескольким символам скорректированную ошибку слежения компоненты,
корректируют оценку задержки сигнала компоненты по фильтрованной скорректированной ошибке слежения,
комплексные корреляционные отклики символов сигнала задерживают и перемножают на комплексно сопряженную оценку комплексной огибающей символов, получая мягкие решения информационных символов компоненты;
формируют мягкие решения информационных символов, суммируя мягкие решения информационных символов всех компонент;
формируют оценки информационных символов по мягким решениям информационных символов;
перемножают комплексные корреляционные отклики символов сигнала всех компонент на комплексно сопряженную оценку информационного параметра символа;
корректируют полученные произведения;
формируют оценки комплексных огибающих символов компонент, фильтруя скорректированные произведения;
для каждой компоненты формируют мешающее влияние других компонент в ошибку слежения компоненты по оценкам комплексной огибающей символов компонент, а также по скорректированным оценкам задержек сигналов компонент.
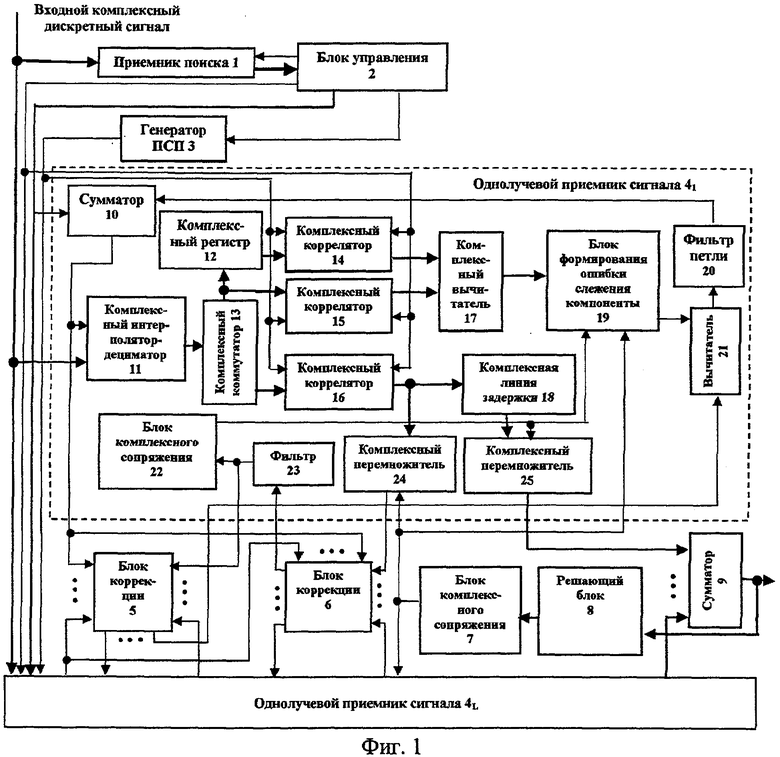
Устройство, с помощью которого осуществляют способ-прототип (Фиг.1) содержит приемник 1 поиска, блок 2 управления, генератор 3 псевдослучайной последовательности (ПСП), L однолучевых приемников 41-4L сигнала, первый блок 5 коррекции, второй блок 6 коррекции, блок 7 комплексного сопряжения, решающий блок 8 и сумматор 9, при этом каждый однолучевый приемник 41-4L сигнала содержит блок 10 определения задержки, комплексный интерполятор - дециматор 11, комплексный регистр 12, комплексный коммутатор 13, первый 14, второй 15 и третий 16 комплексные корреляторы, комплексный вычитатель 17, комплексную линию 18 задержки, блок 19 формирования ошибки слежения компоненты, фильтр 20 петли, вычитатель 21, блок 22 комплексного сопряжения, фильтр 23, первый 24 и второй 25 комплексные перемножители, причем первые входы приемника 1 поиска и комплексного интерполятора - дециматора 11 в каждом однолучевом приемнике 41-4L сигнала объединены, образуя вход устройства, который является входом комплексного дискретного сигнала, выход приемника 1 поиска соединен с входом блока 2 управления, первый выход которого соединен со вторым входом приемника 1 поиска, второй выход блока 2 управления соединен с первым входом блока 10 определения задержки в каждом однолучевом приемнике 41-4L сигнала, третий выход блока 2 управления соединен со входом генератора 3 ПСП, выход которого соединен с первыми входами первого 14, второго 15 и третьего 16 комплексных корреляторов в каждом однолучевом приемнике 41-4L сигнала, четвертый выход блока 2 управления соединен со вторыми входами первого 14, второго 15 и третьего 16 комплексных корреляторов в каждом однолучевом приемнике 41-4L сигнала, выход блока 10 определения задержки в каждом однолучевом приемнике 41-4L сигнала соединен со вторым входом комплексного интерполятора - дециматора 11 и соответствующими ему первыми входами первого 5 и второго 6 блока коррекции, вход блока 10 определения задержки соединен с выходом фильтра 20 петли, выход комплексного регистра 12 соединен с третьим входом первого комплексного коррелятора 14, выход которого соединен с первым входом комплексного вычитателя 17, второй вход которого соединен с выходом второго комплексного коррелятора 15, выход комплексного вычитателя 17 соединен с первым входом блока 19 формирования ошибки слежения компоненты, третий вход второго комплексного коррелятора 15 и вход комплексного регистра 12 объединены и соединены с первым выходом комплексного коммутатора 13, вход которого соединен с выходом комплексного интерполятора - коррелятора 11, второй выход комплексного коммутатора 13 соединен с третьим входом третьего комплексного коррелятора 16, выход которого соединен с первым входом первого комплексного перемножителя 24 и входом комплексной линии 18 задержки, выход которой соединен с первым входом второго комплексного перемножителя 25, второй вход комплексного перемножителя 25 и второй вход блока 19 формирования ошибки слежения компоненты объединены и соединены с выходом блока 22 комплексного сопряжения, третий вход блока 19 формирования ошибки слежения компоненты и второй вход первого комплексного перемножителя 24 в каждом однолучевом приемнике 41-4L сигнала объединены и соединены с выходом блока 7 комплексного сопряжения, выход блока 19 формирования ошибки слежения компоненты соединен с первым входом вычитателя 21, выход которого соединен с входом фильтра 20 петли, второй вход вычитателя 21 в каждом однолучевом приемнике 41-4L сигнала соединен с соответствующим ему выходом первого блока 5 коррекции, выход фильтра 23 в каждом однолучевом приемнике 41-4L сигнала соединен с входом блока 22 комплексного сопряжения и соответствующим ему входом первого блока 5 коррекции, вторые входы второго блока 6 коррекции соединены с выходами комплексного перемножителя 24 каждого однолучевого приемника 41-4L сигнала, выходы второго блока коррекции 6 соединены с входом фильтра 23 каждого однолучевого приемника 41-4L сигнала, вход блока 7 комплексного сопряжения соединен с выходом решающего блока 8, вход которого соединен с выходом сумматора 9, который является выходом устройства, входы сумматора соединены с выходами комплексного перемножителя 25 каждого однолучевого приемника 41-4L, сигнала.
Устройство-прототип работает следующим образом (см. Фиг.1). Входной комплексный дискретный сигнал поступает на первый вход приемника 1 поиска и на входы L однолучевых приемников 41-4L сигнала, а именно на первые входы комплексных интерполяторов - дециматоров 11. По сигналу с блока 2 управления в приемнике 1 поиска осуществляют поиск компонент входного многолучевого сигнала и формируют начальную оценку их временных позиций относительно временного положения опорного сигнала генератора 3 ПСП. Начальную оценку временных позиций обнаруженных компонент многолучевого входного сигнала подают через блок 2 управления на первые входы блоков 10 определения задержки соответствующих однолучевых приемников 41-4L. По сигналу управления, поступающему с третьего выхода блока 2 управления, генератор 3 ПСП на выходе формирует синфазные и квадратурные составляющие опорного сигнала, которые поступают на первые входы первого 14, второго 15 и третьего 16 комплексных корреляторов однолучевых приемников 41-4L. На вторые входы первого 14, второго 15 и третьего 16 комплексных корреляторов однолучевых приемников 41-4L подают сигнал сброса с блока 2 управления. Для каждой компоненты в соответствующем однолучевом приемнике 41-4L на второй вход комплексного интерполятора - дециматора 11 с выхода блока 10 определения задержки поступает необходимая задержка входного сигнала. Вначале она равна начальной оценке временной позиции компоненты относительно временного положения опорного сигнала, поступающей с блока 2 управления, а в дальнейшем - сумме текущей оценки временной позиции компоненты и фильтрованной скорректированной ошибки слежения с выхода фильтра 20 петли.
В комплексном интерполяторе - дециматоре 11 осуществляют интерполяцию входного комплексного дискретного сигнала, в результате увеличивая частоту его дискретизации, и задерживают входной сигнал в соответствии с оценкой временной позиции компоненты и осуществляют децимацию задержанного сигнала. С выхода комплексного интерполятора - дециматора 11 отсчеты задержанного дискретного комплексного сигнала через комплексный коммутатор 13 поступают поочередно (через 0,5 чипа) на третий вход третьего комплексного коррелятора 16, на третий вход второго комплексного коррелятора 15 и через комплексный регистр 12 на третий вход первого комплексного коррелятора 14. Комплексный регистр 12 осуществляет задержку на один чип.
Первый 14 и второй 15 комплексные корреляторы используют для формирования запаздывающих и опережающих комплексных корреляционных откликов символов сигнала, которые поступают соответственно на первый и второй вход комплексного вычитателя 17. С выхода комплексного вычитателя 17 разность запаздывающих и опережающих комплексных корреляционных откликов символов сигнала поступает на первый вход блока 19 формирования ошибки слежения компоненты.
В блоке 19 формируют ошибку слежения компоненты, последовательно перемножая сформированную разность на комплексно сопряженную оценку комплексной огибающей символа компоненты и на комплексно сопряженную оценку информационного параметра символа, которые поступают на второй и на третий входы блока 19 соответственно с выходов блоков 22 и 7 комплексного сопряжения. Дополнительно комплексно-сопряженную оценку информационного параметра символа подают на второй вход первого комплексного перемножителя 24.
Сформированную ошибку слежения компоненты подают на первый вход вычитателя 21, в котором ее корректируют, вычитая из нее мешающее влияние других компонент, которое поступает с блока 5 коррекции. Мешающие влияния для всех компонент формируют в блоке 5 коррекции по оценкам комплексной огибающей символа и временных позиций компонент. Скорректированную ошибку слежения компоненты фильтруют по нескольким символам в фильтре 20 петли и подают на второй вход блока 10 определения задержки.
Третьи комплексные корреляторы 16 однолучевых приемников 41-4L используют для приема информационных символов. Комплексные корреляционные отклики символов сигнала с выхода третьего комплексного коррелятора 16 поступают на вход комплексной линии 18 задержки и на первый вход первого комплексного перемножителя 24. В комплексной линии 18 задержки комплексные корреляционные отклики символов сигнала задерживают на интервал времени, необходимый для оценки комплексной огибающей символов компоненты, и перемножают в втором комплексном перемножителе 25 на комплексно сопряженную оценку комплексной огибающей символов, получая мягкие решения информационных символов компоненты.
Мягкие решения информационных символов всех компонент суммируют в сумматоре 9, в результате формируя мягкие решения информационных символов, которые поступают на выход устройства и на решающий блок 8. В блоке 8 по мягким решениям информационных символов формируют оценки информационных символов, которые поступают в блок 7 комплексного сопряжения. С блока 7 комплексно-сопряженные оценки информационных символов поступают на третьи входы блоков 19 и вторые входы первых комплексных перемножителей 24 однолучевых приемников сигнала 41-4L.
В первых комплексных перемножителях 24 однолучевых приемников сигнала 41-4L перемножают комплексные корреляционные отклики символов сигнала на комплексно-сопряженную оценку информационного параметра символа, и результаты перемножения подают на вторые входы второго блока 6 коррекции. На первые входы первого 5 и второго 6 блоков коррекции с выходов блока 10 определения задержки однолучевых приемников 41-4L поступают задержки компонент входного сигнала. Во втором блоке 6 коррекции корректируют полученные произведения, устраняя взаимное влияние сигналов лучей друг на друга. Скорректированные произведения компонент с выходов второго блока 6 коррекции поступают на соответствующие фильтры 23 однолучевых приемников 41-4L, в которых осуществляют их фильтрацию на интервале нескольких символов, формируя, таким образом, оценки комплексных огибающих символов компонент. Сформированные оценки комплексных огибающих символов компонент поступают на входы блоков 22 комплексного сопряжения однолучевых приемников 41-4L и на вторые входы первого блока 5 коррекции. В первом блоке 5 коррекции по оценкам комплексной огибающей символов компонент и по задержкам компонент входного сигнала с блока 10 формируют для каждой компоненты мешающее влияние других компонент на ошибку слежения.
Основным недостатком способа-прототипа является отсутствие эффективного решения проблемы определения числа компонент многолучевого сигнала в условиях неразрешаемой многолучевости. Ошибка в определении числа неразрешаемых компонент может приводить к существенным энергетическим потерям.
Задача заявляемых изобретений - повышение помехоустойчивости приема сигнала в условиях неразрешаемой многолучевости, уменьшение необходимого ресурса обработки.
Технический результат достигается за счет того, что в способ приема многолучевого сигнала, при котором для слежения и оценки канала распространения число одновременно анализируемых временных позиций сигнала ограничено величиной N, заключающийся в том, что:
- периодически с периодом Ts в области многолучевости осуществляют поиск компонент многолучевого сигнала и определяют оценку поиска их временных позиций,
- периодически с шагом длительностью Tt определяют временные позиции компонент многолучевого сигнала,
- формируют синфазную и квадратурную составляющие комплексных корреляционных откликов пилот-сигнала на интервале шага слежения,
- находят оценку временных позиций компонент,
- находят мягкие решения об информационных символах, используя сформированную оценку временных позиций компонент многолучевого сигнала, для чего:
- формируют оценки комплексной огибающей пилот-символов, соответствующие оценкам временных позиций компонент многолучевого сигнала, как взвешенную сумму комплексных корреляционных откликов пилот-символов компонент,
- формируют оценки комплексной огибающей информационных символов компонент, фильтруя соответствующие оценки комплексной огибающей пилот-символов,
- формируют синфазную и квадратурную составляющие комплексных корреляционных откликов информационных символов, соответствующие оценкам временных позиций компонент многолучевого сигнала,
- формируют мягкие решения компонент об информационных символах, умножая соответствующие комплексные корреляционные отклики информационных символов на комплексно сопряженную оценку комплексной огибающей информационных символов компоненты,
- формируют мягкие решения об информационных символах, суммируя мягкие решения компонент об информационных символах,
согласно изобретению вводят следующую последовательность действий:
- осуществляют ранжирование по убыванию мощности временных позиций, найденных в процедуре поиска,
- периодически с шагом длительностью Tt определяют число компонент многолучевого сигнала, для чего на каждом шаге:
- осуществляют ранжирование временных позиций, отстоящих на 1/2 чипа с опережением и отставанием от временных позиций компонент предыдущего шага слежения, по убыванию мощности порождающей компоненты, причем для первого шага слежения в качестве компонент предыдущего шага слежения используют компоненты, найденные при поиске,
- осуществляют ранжирование по убыванию мощности временных позиций, которые исследовались на предыдущем шаге слежения, за исключением первого шага слежения,
- формируют массив временных позиций, подлежащих анализу на каждом шаге слежения, при этом массив наполняют временными позициями в следующей последовательности:
a) временные позиции компонент предыдущего шага слежения,
b) ранжированные временные позиции, отстоящие на 1/2 чипа с опережением и отставанием от временных позиций компонент предыдущего шага слежения, при этом, начиная с этой группы временных позиций и далее, временная позиция добавляется в формируемый массив лишь в случае, если расстояние между этой временной позицией и временными позициями, уже находящимися в массиве, не меньше 1/2 чипа,
c) ранжированные временные позиции компонент, найденных в последней процедуре поиска,
d) ранжированные временные позиции, которые исследовались на предыдущем шаге слежения,
формирование массива прекращают по достижении числа временных позиций массива величины N,
- синфазную и квадратурную составляющие комплексных корреляционных откликов пилот-сигнала на интервале шага слежения, а также сумму их квадратов формируют одновременно для всех временных позиций сформированного массива,
- находят максимальную сумму квадратов синфазной и квадратурной составляющих комплексных корреляционных откликов пилот-сигнала на интервале шага слежения,
- временные позиции сформированного массива группируют во временные области таким образом, что, если временное расстояние между временными позициями массива меньше, чем чип, то они входят в одну область, в противном случае временные позиции входят в разные области,
- для каждой временной области одновременно с нахождением оценки временных позиций компонент находят оценку, соответствующего числа компонент, для чего:
- отбрасывают временные позиции области, для которых сумма квадратов синфазной и квадратурной составляющих комплексных корреляционных откликов пилот-сигнала на интервале шага слежения меньше заданного порога, величина которого пропорциональна максимальной сумме квадратов синфазной и квадратурной составляющих комплексных корреляционных откликов пилот-сигнала на интервале шага слежения,
- из всевозможных наборов оставшихся временных позиций области, число возможных временных позиций набора от 1 до m, временное расстояние между временными позициями набора не менее 1/2 чипа, находят набор временных позиций области, для которого решающая функция, представляющая собой сумму квадратичной формы синфазных составляющих комплексных корреляционных откликов пилот-сигнала на интервале шага слежения для временных позиций набора, квадратичной формы квадратурных составляющих комплексных корреляционных откликов пилот-сигнала на интервале шага слежения для временных позиций набора и слагаемого, линейно убывающего с ростом числа временных позиций набора и пропорционального максимальной сумме квадратов синфазной и квадратурной составляющих комплексных корреляционных откликов пилот-сигнала на интервале шага слежения временных позиций сформированного массива, - максимальна; временные позиции найденного набора принимают за оценку временных позиций компонент, а число временных позиций набора - за оценку числа компонент в исследуемой области,
- если сумма оценок числа компонент всех областей не превышает максимальное значение отслеживаемых компонент Р, то окончательная оценка числа компонент многолучевого сигнала равна сумме оценок числа компонент всех областей, а оценка их временных позиций соответствует оценкам временных позиций областей, в противном случае из совокупности оценок временных позиций компонент всех областей выбирают Р компонент с максимальными значениями мощности, а оценка временных позиций компонент многолучевого сигнала соответствует временным позициям этих наиболее мощных компонент,
- мягкие решения об информационных символах находят, используя сформированную оценку числа компонент.
Задача решается также за счет того, что в устройство приема многолучевых сигналов, содержащее приемник поиска, блок управления, генератор псевдослучайной последовательности (ПСП), L однолучевых приемников сигнала, блок коррекции и сумматор, при этом каждый однолучевый приемник сигнала содержит первый и второй комплексные корреляторы, комплексную линию задержки, блок комплексного сопряжения, фильтр и комплексный перемножитель, причем первый вход приемника поиска является входом устройства, входом комплексного дискретного сигнала, выход приемника поиска соединен с первым входом блока управления, первый выход которого соединен со вторым входом приемника поиска, второй выход блока управления соединен со входом генератора ПСП, первый выход которого соединен с первым входом первого комплексного коррелятора в каждом однолучевом приемнике сигнала, третий выход блока управления соединен со вторым входом первого и первым входом второго комплексных корреляторов в каждом однолучевом приемнике сигнала, выход второго комплексного коррелятора соединен с входом комплексной линии задержки, выход которой соединен с первым входом комплексного перемножителя, второй вход которого соединен с выходом блока комплексного сопряжения, вход которого соединен с выходом фильтра, вход фильтра каждого однолучевого приемника сигнала соединен с соответствующим ему выходом блока коррекции, выходы комплексного перемножителя каждого однолучевого приемника сигнала соединены с соответствующими им входами сумматора, выход которого является выходом устройства,
согласно изобретению введены:
М блоков задержки,
М комплексных корреляторов,
многоканальный блок вычисления суммы квадратов,
первый, второй и третий блоки ранжирования,
блок поиска максимума,
блок формирования массива временных позиций,
ключ,
блок формирования оценок временных позиций областей,
блок ограничения числа компонент,
в каждый однолучевый приемник сигнала введен узел задержки,
при этом первые входы М блоков задержки и первый вход узла задержки в каждом однолучевом приемнике сигнала присоединены к входу устройства,
вторые входы М блоков задержки, первые входы М блоков комплексных корреляторов, вторые входы узлов задержки каждого однолучевого приемника сигнала, первые входы блока коррекции, первые входы третьего блока ранжирования и блока формирования оценок временных позиций областей соединены с третьим выходом блока управления,
вторые входы М комплексных корреляторов соединены с первым выходом генератора ПСП,
второй выход генератора ПСП соединен со вторыми входами вторых комплексных корреляторов каждого однолучевого приемника сигнала,
третьи входы первого и второго комплексных корреляторов соединены с выходом узла задержки в каждом однолучевом приемнике сигнала,
третьи входы М комплексных корреляторов соединены с выходами М блоков задержки,
выходы М комплексных корреляторов соединены с соответствующими им М входами многоканального блока вычисления суммы квадратов,
L входов многоканального блока вычисления суммы квадратов объединены с L вторыми входами блока коррекции и соединены с выходами соответствующих им первых комплексных корреляторов каждого однолучевого приемника сигнала,
причем М и L входов многоканального блока вычисления суммы квадратов объединены со вторыми входами блока формирования оценок временных позиций,
выходы многоканального блока вычисления суммы квадратов соединены с входом первого блока ранжирования, входом блока поиска максимума, первым входом блока ограничения числа компонент и третьим входом блока формирования оценок временных позиций областей,
четвертый вход блока формирования оценок временных позиций областей соединен с выходом блока поиска максимума,
выход блока формирования оценок временных позиций областей соединен со вторым входом блока ограничения числа компонент,
третий вход блока ограничения числа компонент, второй вход третьего блока ранжирования и первый вход блока формирования массива временных позиций соединены с выходом ключа,
четвертый вход блока ограничения числа компонент и первый вход ключа объединены и соединены с четвертым выходом блока управления,
выход блока ограничения числа компонент соединен со вторыми входами ключа и блока управления,
пятый выход блока управления соединен с входом второго блока ранжирования, выход которого соединен с третьим входом ключа и вторым входом блока формирования массива временных позиций, третий вход которого соединен с выходом третьего блока ранжирования,
четвертый вход блока формирования массива временных позиций соединен с выходом первого блока ранжирования,
выход блока формирования массива временных позиций соединен с третьим входом блока управления.
Введение новых отличительных признаков в способ и устройство согласно описанному изобретению позволяет получить новый технический результат - повысить помехоустойчивость приема сигнала в условиях неразрешаемой многолучевости и уменьшить необходимый ресурс обработки.
Заявляемый способ приема многолучевого сигнала и устройство для его осуществления в отличие от известных технических решений уточняют в процессе слежения не только временные позиции компонент многолучевого сигнала, но также и их число. Алгоритм приема многолучевого сигнала при оценке комплексной огибающей компенсирует взаимовлияние сигналов разных лучей друг на друга, что позволяет получить значительный энергетический выигрыш в условиях неразрешимой многолучевости по сравнению с лучшими известными алгоритмами. При этом помехоустойчивость предлагаемого способа практически не уступает потенциальной (когда априори известны временные позиции компонент многолучевого сигнала). При этом заявляемый способ позволяет уменьшить необходимый ресурс обработки (количество корреляторов).
Изобретение поясняется примерами выполнения и чертежами:
На фиг.1 приведена структурная схема устройства-прототипа.
На фиг.2 - структурная схема заявляемого устройства.
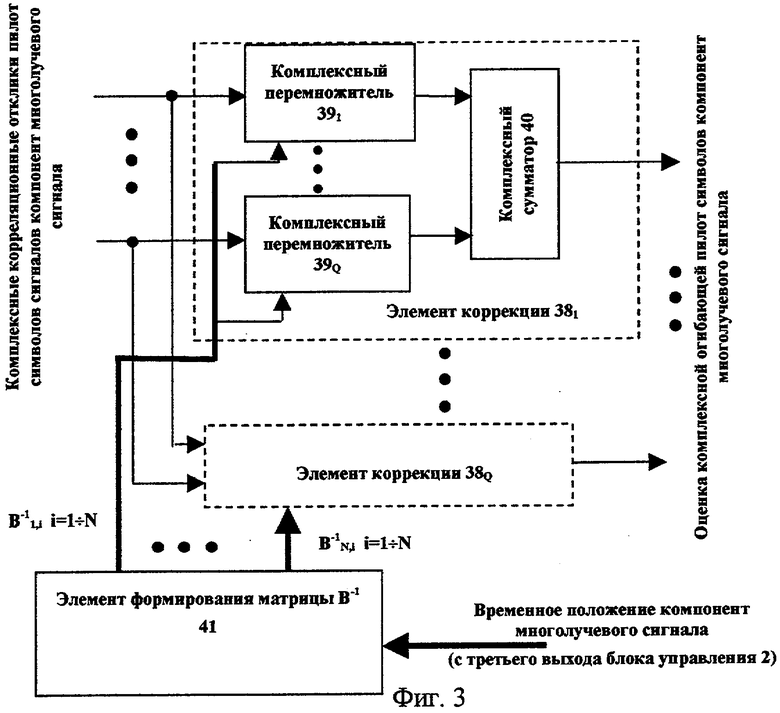
На фиг.3 - структурная схема блока 6 коррекции, приведена как пример выполнения.
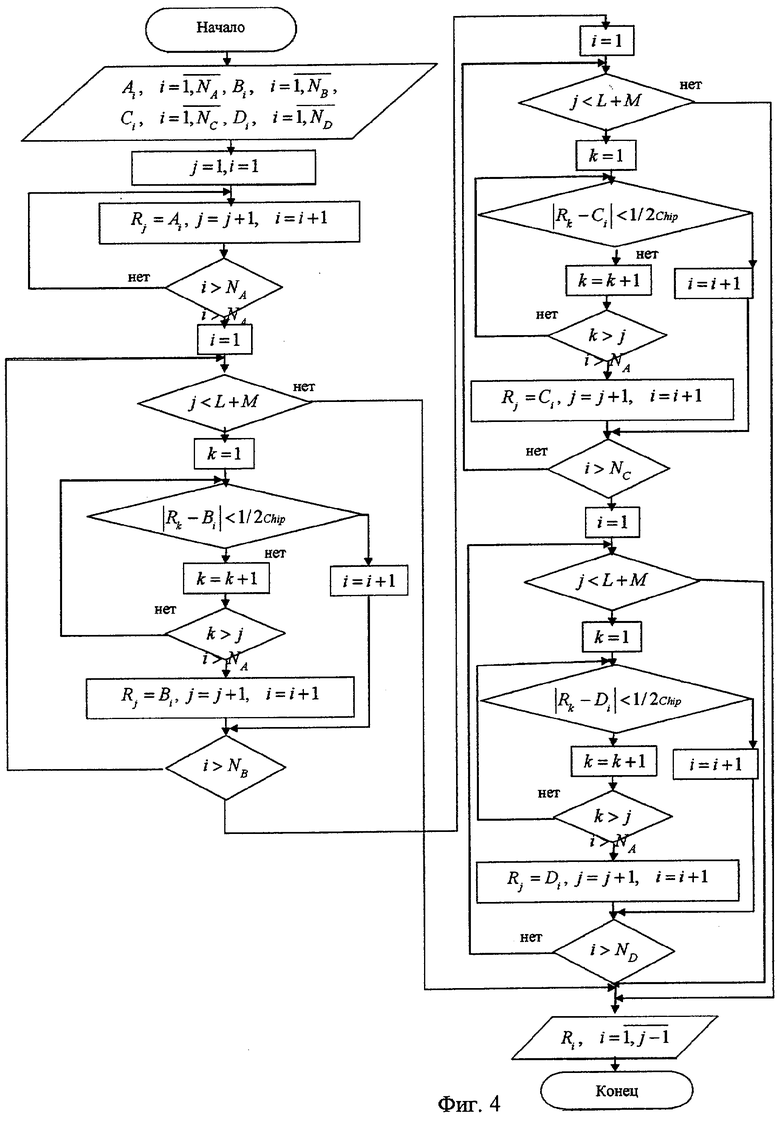
На фиг.4 - алгоритм блока 33 формирования массива временных позиций.
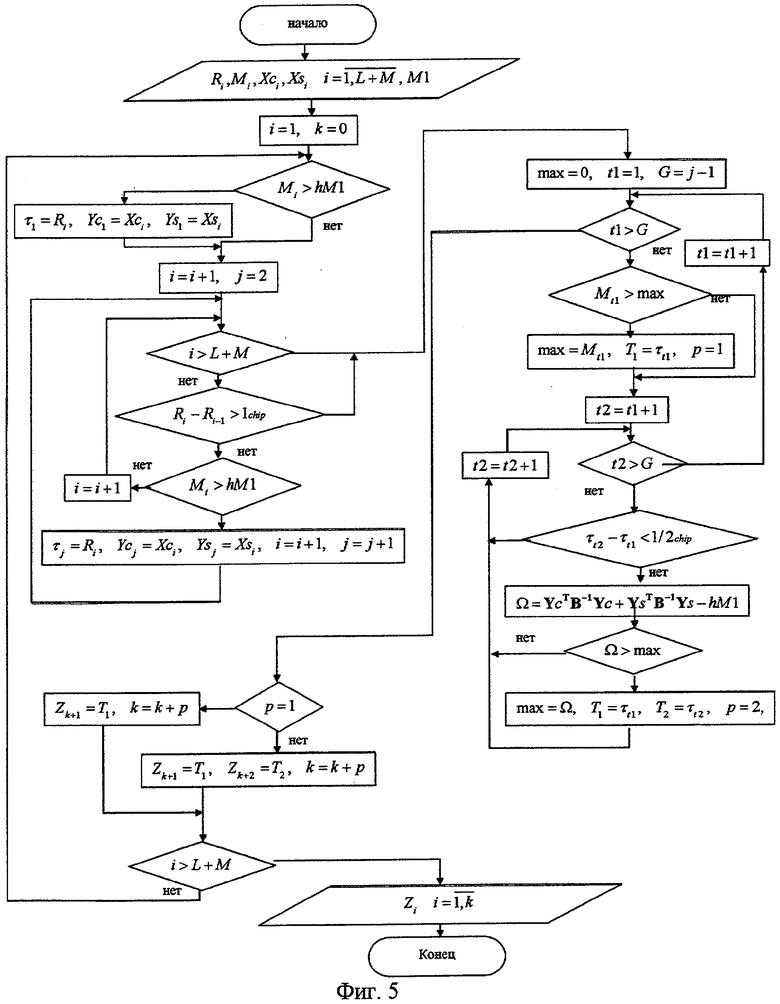
На фиг.5 - алгоритм блока 35 формирования оценок временных позиций областей.
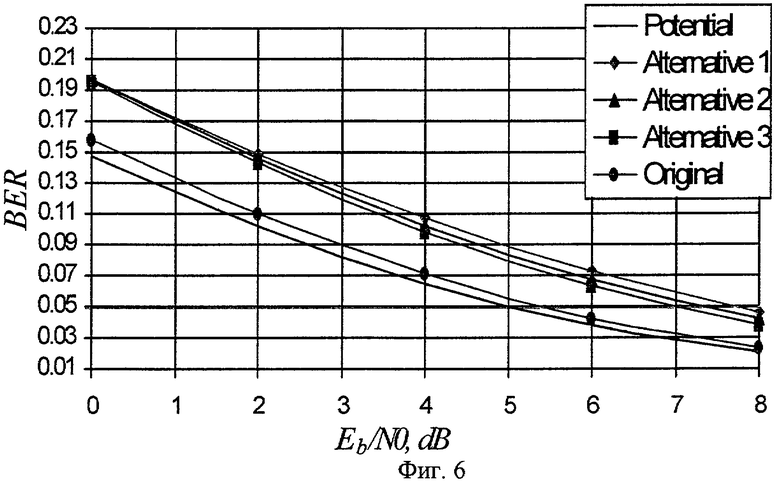
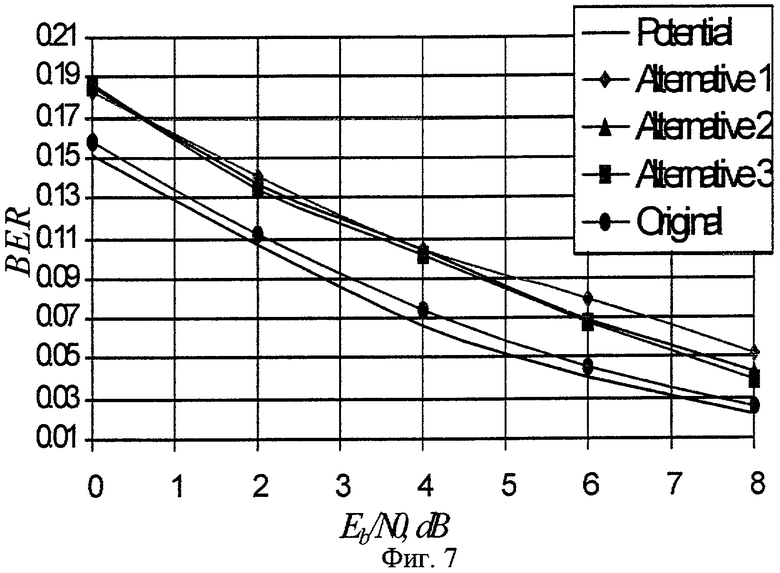
На фиг.6 и 7 представлены результаты сравнения помехоустойчивости заявляемого изобретения и известных алгоритмов, полученные методом компьютерного моделирования.
Заявляемое устройство приема многолучевого сигнала (фиг.2) содержит приемник 1 поиска, блок 2 управления, генератор 3 псевдослучайной последовательности (ПСП), L однолучевых приемников 41-4L сигнала, блок 6 коррекции и сумматор 9, при этом каждый однолучевый приемник 41-4L сигнала содержит первый 161 и второй 162 комплексные корреляторы, комплексную линию 18 задержки, блок 22 комплексного сопряжения, фильтр 23 и комплексный перемножитель 25, причем первый вход приемника 1 поиска является входом устройства, выход приемника 1 поиска соединен с первым входом блока 2 управления, первый выход которого соединен со вторым входом приемника 1 поиска, второй выход блока 2 управления соединен со входом генератора 3 ПСП, первый выход которого соединен с первым входом первого 161 комплексного коррелятора в каждом однолучевом приемнике 41-4L сигнала, третий выход блока 2 управления соединен со вторым входом первого 161 и первым входом второго 162 комплексных корреляторов в каждом однолучевом приемнике 41-4L сигнала, выход второго комплексного коррелятора 162 соединен с входом комплексной линии 18 задержки, выход которой соединен с первым входом комплексного перемножителя 25, второй вход которого соединен с выходом блока 22 комплексного сопряжения, вход которого соединен с выходом фильтра 23, вход фильтра 23 каждого однолучевого приемника 41-4L сигнала соединен с соответствующим ему выходом блока 6 коррекции, выходы комплексного перемножителя 25 каждого однолучевого приемника 41-4L сигнала соединены с соответствующими им входами сумматора 9, выход которого является выходом устройства, согласно изобретению дополнительно содержит: М блоков 261-26М задержки, М комплексных корреляторов 271-27М, многоканальный блок 28 вычисления суммы квадратов, первый 29, второй 30 и третий 31 блоки ранжирования, блок 32 поиска максимума, блок 33 формирования массива временных позиций, ключ 34, блок 35 формирования оценок временных позиций областей, блок 36 ограничения числа компонент, в каждый однолучевый приемник 41-4L сигнала введен узел 37 задержки, при этом первые входы М блоков 261-26М задержки и первый вход узла 37 задержки в каждом однолучевом приемнике 41-4L сигнала присоединены к входу устройства, вторые входы М блоков 261-26М задержки, первые входы М блоков 271-27М комплексных корреляторов, вторые входы узлов 37 задержки каждого однолучевого приемника 41-4L сигнала, первые входы блока 6 коррекции, первые входы третьего блока 31 ранжирования и блока 35 формирования оценок временных позиций областей соединены с третьим выходом блока 2 управления, вторые входы М комплексных корреляторов 271-27М соединены с первым выходом генератора 3 ПСП, второй выход генератора 3 ПСП соединен со вторыми входами вторых комплексных корреляторов 162 каждого однолучевого приемника 41-4L сигнала, третьи входы первого 161 и второго 162 комплексных корреляторов соединены с выходом узла 37 задержки в каждом однолучевом приемнике 41-4L сигнала, третьи входы М комплексных корреляторов 271-27М соединены с выходами М блоков 261-26М задержки, выходы М комплексных корреляторов 271-27М соединены с соответствующими им М входами многоканального блока 28 вычисления суммы квадратов, L входов многоканального блока 28 вычисления суммы квадратов объединены с L вторыми входами блока 6 коррекции и соединены с выходами соответствующих им первых комплексных корреляторов 161 каждого однолучевого приемника 41-4L сигнала, причем М и L входов многоканального блока 28 вычисления суммы квадратов объединены со вторыми входами блока 35 формирования оценок временных позиций, выходы многоканального блока 28 вычисления суммы квадратов соединены со входом первого блока 29 ранжирования, входом блока 32 поиска максимума, первым входом блока 36 ограничения числа компонент и третьим входом блока 35 формирования оценок временных позиций областей, четвертый вход блока 35 формирования оценок временных позиций областей соединен с выходом блока 32 поиска максимума, выход блока 35 формирования оценок временных позиций областей соединен со вторым входом блока 36 ограничения числа компонент, третий вход блока 36 ограничения числа компонент, второй вход третьего блока 31 ранжирования и первый вход блока 33 формирования массива временных позиций соединены с выходом ключа 34, четвертый вход блока 36 ограничения числа компонент и первый вход ключа объединены и соединены с четвертым выходом блока 2 управления, выход блока 36 ограничения числа компонент соединен с вторыми входами ключа 34 и блока 2 управления, пятый выход блока 2 управления соединен со входом второго блока 30 ранжирования, выход которого соединен с третьим входом ключа 34 и вторым входом блока 33 формирования массива временных позиций, третий вход которого соединен с выходом третьего блока 31 ранжирования, четвертый вход блока 33 формирования массива временных позиций соединен с выходом первого блока 29 ранжирования, выход блока 33 формирования массива временных позиций соединен с третьим входом блока 2 управления.
Блок 6 коррекции, пример выполнения которого для обработки одной области приведен на фиг.3, содержит Q элементов 381-38Q коррекции, элемент 41 формирования матрицы В-1, каждый элемент коррекции содержит Q комплексных перемножителей 391-39Q и комплексный сумматор 40.
На фиг.1, 2 и 3 стрелки (связи) выполнены различной толщины, при этом тонкие стрелки показывают соединение блоков через непосредственные связи, а более толстые стрелки показывают соединение блоков и элементов структурной схемы по шине (множество связей).
Заявляемый способ приема многолучевого сигнала, при котором для слежения и оценки канала распространения число одновременно анализируемых временных позиций сигнала ограничено величиной N, осуществляют следующим образом:
- периодически с периодом Ts в области многолучевости осуществляют поиск компонент многолучевого сигнала и определяют оценку поиска их числа и временных позиций;
- осуществляют ранжирование по убыванию мощности временных позиций, найденных в процедуре поиска;
- периодически с шагом длительностью Тt определяют число и временные позиции компонент многолучевого сигнала, для чего на каждом шаге выполняют следующие операции:
- осуществляют ранжирование временных позиций, отстоящих на 1/2 чипа с опережением и отставанием от временных позиций компонент предыдущего шага слежения, по убыванию мощности порождающей компоненты, причем для первого шага слежения в качестве компонент предыдущего шага слежения используют компоненты, найденные при поиске;
- осуществляют ранжирование по убыванию мощности временных позиций, которые исследовались на предыдущем шаге слежения, за исключением первого шага слежения;
- формируют массив временных позиций, подлежащих анализу на каждом шаге слежения, при этом массив наполняют временными позициями в следующей последовательности:
а) временные позиции компонент предыдущего шага слежения,
b) ранжированные временные позиции, отстоящие на 1/2 чипа с опережением и отставанием от временных позиций компонент предыдущего шага слежения, при этом, начиная с этой группы временных позиций и далее, временная позиция добавляется в формируемый массив лишь в случае, если расстояние между этой временной позицией и временными позициями, уже находящимися в массиве, не меньше 1/2 чипа,
c) ранжированные временные позиции компонент, найденных в последней процедуре поиска,
d) ранжированные временные позиции, которые исследовались на предыдущем шаге слежения;
формирование массива прекращают по достижении числа временных позиций массива величины N;
- формируют синфазную и квадратурную составляющие комплексных корреляционных откликов пилот-сигнала на интервале шага слежения для всех временных позиций сформированного массива, а также сумму их квадратов;
- находят максимальную сумму квадратов синфазной и квадратурной составляющих комплексных корреляционных откликов пилот-сигнала на интервале шага слежения;
- временные позиции сформированного массива группируют во временные области таким образом, что, если временное расстояние между временными позициями массива меньше, чем чип, то они входят в одну область, в противном случае временные позиции входят в разные области;
- для каждой временной области находят оценку числа и временных позиций компонент, для чего:
- отбрасывают временные позиции области, для которых сумма квадратов синфазной и квадратурной составляющих комплексных корреляционных откликов пилот-сигнала на интервале шага слежения меньше заданного порога, величина которого пропорциональна максимальной сумме квадратов синфазной и квадратурной составляющих комплексных корреляционных откликов пилот-сигнала на интервале шага слежения;
- из всевозможных наборов оставшихся временных позиций области, число возможных временных позиций набора от 1 до m, временное расстояние между временными позициями набора не менее 1/2 чипа, находят набор временных позиций области, для которого решающая функция, представляющая собой сумму квадратичной формы синфазных составляющих комплексных корреляционных откликов пилот-сигнала на интервале шага слежения для временных позиций набора, квадратичной формы квадратурных составляющих комплексных корреляционных откликов пилот-сигнала на интервале шага слежения для временных позиций набора и слагаемого, линейно убывающего с ростом числа временных позиций набора и пропорционального максимальной сумме квадратов синфазной и квадратурной составляющих комплексных корреляционных откликов пилот-сигнала на интервале шага слежения временных позиций сформированного массива, - максимальна; временные позиции найденного набора принимают за оценку временных позиций компонент, а число временных позиций набора - за оценку числа компонент в исследуемой области,
- коэффициент пропорциональности для третьего слагаемого решающей функции равен, например, 0.1÷0.2,
- матрицей квадратичных форм для решающей функции является матрица, обратная нормированной корреляционной матрице, соответствующей временным позициям набора;
- если сумма оценок числа компонент всех областей не превышает максимальное значение отслеживаемых компонент Р, то окончательная оценка числа компонент многолучевого сигнала равна сумме оценок числа компонент всех областей, а оценка их временных позиций соответствует оценкам временных позиций областей, в противном случае из совокупности оценок временных позиций компонент всех областей выбирают Р компонент с максимальными значениями мощности, а оценка временных позиций компонент многолучевого сигнала соответствует временным позициям этих наиболее мощных компонент;
- находят мягкие решения об информационных символах, используя сформированную оценку числа и временных позиций компонент многолучевого сигнала, для чего:
- формируют оценки комплексной огибающей пилот-символов, соответствующие оценкам временных позиций компонент многолучевого сигнала, как взвешенную сумму комплексных корреляционных откликов пилот-символов компонент;
- формируют оценки комплексной огибающей информационных символов компонент, фильтруя соответствующие оценки комплексной огибающей пилот-символов компонент;
- формируют синфазную и квадратурную составляющие комплексных корреляционных откликов информационных символов, соответствующие оценкам временных позиций компонент многолучевого сигнала;
- формируют мягкие решения компонент об информационных символах, умножая соответствующие комплексные корреляционные отклики информационных символов на комплексно сопряженную оценку комплексной огибающей информационных символов компоненты;
- формируют мягкие решения об информационных символах, суммируя мягкие решения компонент об информационных символах.
Заявляемый способ осуществляют на устройстве приема многолучевого сигнала, структурная схема которого выполнена фиг.2.
Входной комплексный дискретный сигнал поступает на первый вход приемника 1 поиска, на первые входы М блоков 261-26М задержки и на первые входы L узлов 371-37L задержки однолучевых приемников 41-4L сигнала. По сигналу управления с первого выхода блока 2 управления в приемнике 1 поиска периодически с периодом Ts в области многолучевости осуществляют поиск компонент многолучевого сигнала и определяют оценку поиска их числа и временных позиций относительно временного положения опорного сигнала генератора 3 ПСП, которая вместе с соответствующими величинами мощности поступает на первый вход блока 2 управления. Мощность и временные позиции найденных в процедуре поиска компонент поступают с пятого выхода блока 2 управления на вход второго блока 30 ранжирования. Во втором блоке 30 ранжирования осуществляют ранжирование по убыванию мощности временных позиций, найденных в процедуре поиска. Ранжированные по убыванию мощности временные позиции с блока 30 поступают на второй вход блока 33 формирования массива временных позиций, а ранжированные по убыванию мощности временные позиции и мощности найденных компонент поступают на третий вход ключа 34. На второй вход ключа 34 и на второй вход блока 2 управления поступают временные позиции и мощности компонент предыдущего шага слежения с выхода блока 36 ограничения числа компонент. Периодически с шагом длительностью Тt определяют число и временные позиции компонент многолучевого сигнала.
При этом с четвертого выхода блока 2 управления на первый управляемый вход ключа 34 и на четвертый вход блока 36 ограничения числа компонент поступает управляющий сигнал. Для первого после процедуры поиска шага слежения он равен, например, логической единице, для последующих шагов - логическому нулю. По этому управляющему сигналу на первый вход блока 33 формирования массива временных позиций, на второй вход третьего блока 31 ранжирования и на третий вход блока 36 ограничения числа компонент на первом шаге с выхода ключа 34 поступают ранжированные по убыванию мощности временные позиции и мощности, найденные в процедуре поиска, а на последующих шагах - временные позиции и мощности компонент предыдущего шага слежения.
Временные позиции и мощности компонент предыдущего шага слежения с выхода блока 36 ограничения числа компонент поступают также на второй вход блока 2 управления. На третий вход блока 2 управления с блока 33 формирования массива временных позиций поступают временные позиции, подлежащие анализу на текущем шаге слежения. Далее с третьего выхода блока 2 управления временные позиции компонент поступают на вторые входы L узлов 371-37L задержки однолучевых приемников 41-4L сигнала, а остальные, подлежащие анализу временные позиции, - на вторые входы М блоков 261-26М задержки. Кроме того, временные позиции и мощности компонент предыдущего шага слежения с третьего выхода блока 2 управления поступают на первый вход третьего блока 31 ранжирования и на первый вход блока 35 формирования оценок временных позиций областей.
По сигналу управления со второго выхода блока 2 управления на втором и первом выходах генератора 3 ПСП формируют синфазные и квадратурные составляющие опорного сигнала соответственно для информационных и пилот-символов. Синфазные и квадратурные составляющие опорного сигнала пилот-символов поступают на вторые входы М комплексных корреляторов 271-27М и первые входы первых комплексных корреляторов 1611-161L однолучевых приемников 41-4L сигнала. Синфазные и квадратурные составляющие опорного сигнала информационных символов поступают на вторые входы комплексных корреляторов 1621-162L однолучевых приемников 41-4L.
На третьи входы М комплексных корреляторов 271-27М с выходов М блоков 261-26М задержки поступают отсчеты задержанного входного комплексного сигнала. На третьи входы первых комплексных корреляторов 1611-161L и вторых комплексных корреляторов 1621-162L однолучевых приемников 41-4L сигнала с выходов соответствующих им узлов 371-37L задержки поступают отсчеты задержанного входного комплексного сигнала, причем задержка соответствует оценкам временных позиций компонент многолучевого сигнала. Число однолучевых приемников сигнала определяется оценкой числа компонент многолучевого сигнала. На первые входы М комплексных корреляторов 271-27М, а также на вторые входы первых комплексных корреляторов 1611-161L и первые входы вторых комплексных корреляторов 1621-162L однолучевых приемников 41-4L сигнала с третьего выхода блока 2 управления поступает сигнал сброса.
Комплексные корреляционные отклики пилот-символов с выходов М комплексных корреляторов 271-27М и первых комплексных корреляторов 1611-161L однолучевых приемников 41-4L сигнала, соответствующие временным позициям, подлежащим анализу на текущем шаге слежения, поступают на входы многоканального блока 28 вычисления суммы квадратов и на второй вход блока 35 формирования оценок временных позиций областей.
С выходов блока 28 суммы квадратов синфазной и квадратурной составляющих корреляционных откликов пилот-сигнала поступают на вход первого блока 29 ранжирования и вход блока 32 поиска максимума, на третий вход 35 блока формирования оценок временных позиций областей и на первый вход блока 36 ограничения числа компонент.
В блоке 32 поиска максимума определяют максимальное значение суммы квадратов синфазной и квадратурной составляющих корреляционного отклика пилот-сигнала, которое поступает на четвертый вход блока 35 формирования оценок временных позиций областей. Блок 35 формирует оценку числа и временных позиций компонент областей, которая поступает на второй вход блока 36 ограничения числа компонент. Если сумма оценок числа компонент всех областей не превышает максимальное значение отслеживаемых компонент Р, то окончательная оценка числа компонент многолучевого сигнала равна сумме оценок числа компонент всех областей, а оценка их временных позиций соответствует оценкам временных позиций областей, в противном случае из совокупности оценок временных позиций компонент всех областей выбирают Р компонент с максимальными значениями мощности, а оценка временных позиций компонент многолучевого сигнала соответствует временным позициям этих наиболее мощных компонент.
В первом блоке 29 ранжирования осуществляют ранжирование по убыванию мощности анализируемых временных позиций. Результат ранжирования поступает на четвертый вход блока 33 формирования массива временных позиций.
В третьем блоке 31 ранжирования осуществляют ранжирование временных позиций, отстоящих на 1/2 чипа с опережением и отставанием от временных позиций компонент предыдущего шага слежения, по убыванию мощности порождающей компоненты, причем для первого шага слежения в качестве компонент предыдущего шага слежения используют компоненты, найденные при поиске. Порождающей для сдвинутых на 1/2 чипа с опережением и отставанием называем компоненту, относительно которой осуществляется сдвиг. Результат ранжирования с блока 31 поступает на третий вход блока 33 формирования массива временных позиций. В блоке 33 формируют массив временных позиций, подлежащих анализу на текущем шаге слежения.
Комплексные корреляционные отклики пилот-символов с выходов первых комплексных корреляторов 1611-161L, однолучевых приемников 41-4L поступают на вторые входы блока 6 коррекции, на первые входы которого поступают временные позиции, соответствующие этим откликам. В блоке 6 коррекции формируют оценки комплексной огибающей пилот-символов, соответствующих оценкам временных позиций компонент многолучевого сигнала, как взвешенную сумму комплексных корреляционных откликов пилот-символов компонент, устраняя взаимовлияние сигналов лучей друг на друга.
Сформированные оценки комплексной огибающей пилот-символов с выходов блока 6 коррекции поступают на фильтры 231-23L, соответствующих однолучевых приемников 41-4L сигнала. В результате фильтрации формируют оценки комплексной огибающей информационных символов компонент, которые с фильтров 231-23L поступают на блоки 221-22L комплексного сопряжения и далее на второй вход комплексных перемножителей 25.
Комплексные корреляционные отклики информационных символов сигнала с выходов вторых комплексных корреляторов 1621-162L однолучевых приемников 41-4L поступают на входы соответствующих комплексных линий 181-18L задержки. В комплексных линиях 181-18L задержки комплексные корреляционные отклики информационных символов задерживают на интервал времени, необходимый для оценки комплексной огибающей информационных символов компонент, и перемножают в соответствующих комплексных перемножителях 251-25L на комплексно сопряженную оценку комплексной огибающей информационных символов компонент, получая мягкие решения информационных символов компоненты.
Мягкие решения информационных символов всех компонент суммируют в сумматоре 9, в результате чего формируют мягкие решения информационных символов, которые поступают на выход устройства.
Рассмотрим реализацию блока 6 коррекции на примере обработки одной области (см. на фиг.3).
Положим, что алгоритм оценки числа и временного положения компонент многолучевого сигнала (входящий в систему слежения за временным положением сигнала) вынес решение о том, что в области р компонент, временные положения которых τi,  Тогда оценка А комплексной огибающей пилот-символов компонент многолучевого сигнала области может быть реализована посредством преобразования
Тогда оценка А комплексной огибающей пилот-символов компонент многолучевого сигнала области может быть реализована посредством преобразования

где Х - вектор комплексных корреляционных откликов пилот-символов компонент многолучевого сигнала области, B={Bnm},  - нормированная корреляционная матрица, соответствующая временным позициям компонент многолучевого сигнала области.
- нормированная корреляционная матрица, соответствующая временным позициям компонент многолучевого сигнала области.
Для ограниченного по полосе сигнала имеет место приближенное равенство
Тc - длительность чипа ПСП.
Выражение (2) определяет необходимые операции с комплексными корреляционными откликами пилот-символов компонент многолучевого сигнала области, которые необходимо выполнить для компенсации взаимовлияния сигналов различных лучей друг на друга. Эта процедура представляет собой взвешенное суммирование комплексных корреляционных откликов пилот-символов сигналов компонент многолучевого сигнала с весами, определяемыми элементами матрицы В, и служит для правильной оценки комплексной огибающей сигналов компонент многолучевого сигнала. Блок 6 коррекции (фиг.3) работает следующим образом.
На вход блока 6 коррекции, а именно на входы элементов 381-38Q коррекции, поступают комплексные корреляционные отклики пилот-символов компонент многолучевого сигнала. На другие входы элементов 381-38Q коррекции поступают соответствующие весовые коэффициенты, рассчитанные в элементе 41 формирования матрицы В-1 в соответствии с оценкой временных позиций компонент многолучевого сигнала. Эта оценка поступает с блока 2 управления. Элемент 41 формирования матрицы В-1 может быть выполнен, например, на микропроцессоре. Элемент 38 коррекции осуществляет взвешенное суммирование комплексных корреляционных откликов пилот-символов компонент многолучевого сигнала в комплексном сумматоре 40. Оценки комплексной огибающей пилот-символов компонент многолучевого сигнала с выходов комплексных сумматоров 40 представляют собой выходные сигналы элементов 38 коррекции, а также являются выходами блока 6 коррекции.
Рассмотрим подробнее работу блока 33 формирования массива временных позиций, алгоритм которого иллюстрирует фиг.4.
На входы блока 33 формирования массива временных позиций, подлежащих анализу, поступают следующие сигналы.
На первый вход - временные позиции компонент предыдущего шага слежения Аi,  с выхода ключа 34, NA - число компонент предыдущего шага слежения.
с выхода ключа 34, NA - число компонент предыдущего шага слежения.
На второй вход - ранжированные временные позиции компонент, найденные в последней процедуре поиска, Сi,  с выхода второго блока 30 ранжирования, Nc - число компонент поиска.
с выхода второго блока 30 ранжирования, Nc - число компонент поиска.
На третий вход - ранжированные временные позиции, отстоящие на 1/2 чипа с опережением и отставанием от временных позиций компонент предыдущего шага слежения Bi,  с выхода третьего блока 31 ранжирования, NB - число компонент, отстоящих на 1/2 чипа с опережением и отставанием от временных позиций компонент предыдущего шага слежения.
с выхода третьего блока 31 ранжирования, NB - число компонент, отстоящих на 1/2 чипа с опережением и отставанием от временных позиций компонент предыдущего шага слежения.
На четвертый вход - ранжированные временные позиции, которые исследовались на предыдущем шаге слежения Di,  с выхода первого блока 29 ранжирования, ND - число временных позиций, которые исследовались на предыдущем шаге слежения.
с выхода первого блока 29 ранжирования, ND - число временных позиций, которые исследовались на предыдущем шаге слежения.
В блоке 33 формируют массив временных позиций Rj,  последовательно добавляя элемент за элементом, начиная с первого. Для чего сначала в формируемый массив добавляют временные позиции компонент предыдущего шага слежения Rj=Aj,
последовательно добавляя элемент за элементом, начиная с первого. Для чего сначала в формируемый массив добавляют временные позиции компонент предыдущего шага слежения Rj=Aj,  Затем анализируют ранжированные временные позиции, отстоящие на 1/2 чипа с опережением и отставанием от временных позиций компонент предыдущего шага слежения, для чего последовательно, начиная с первой временной позиции, сравнивают расстояние между этой временной позицией и временными позициями, уже находящимися в массиве. Если это расстояние хотя бы для одной временной позиции, уже находящейся в массиве, меньше 1/2 чипа, то переходят к анализу следующей временной позиции, в противном случае анализируемую временную позицию добавляют в формируемый массив. Причем после добавления каждой временной позиции анализируют объем массива. Если объем массива оказывается равным заданному числу N, то формирование массива заканчивают.
Затем анализируют ранжированные временные позиции, отстоящие на 1/2 чипа с опережением и отставанием от временных позиций компонент предыдущего шага слежения, для чего последовательно, начиная с первой временной позиции, сравнивают расстояние между этой временной позицией и временными позициями, уже находящимися в массиве. Если это расстояние хотя бы для одной временной позиции, уже находящейся в массиве, меньше 1/2 чипа, то переходят к анализу следующей временной позиции, в противном случае анализируемую временную позицию добавляют в формируемый массив. Причем после добавления каждой временной позиции анализируют объем массива. Если объем массива оказывается равным заданному числу N, то формирование массива заканчивают.
Аналогичным способом в формируемый массив добавляют ранжированные временные позиции, найденные в последней процедуре поиска Сi,  и ранжированные временные позиции, которые исследовались на предыдущем шаге слежения Di,
и ранжированные временные позиции, которые исследовались на предыдущем шаге слежения Di,  .
.
Сформированный в блоке 33 массив временных позиций Rj,  , подлежащих анализу, поступает на третий вход блока 2 управления.
, подлежащих анализу, поступает на третий вход блока 2 управления.
Рассмотрим подробнее работу блока 35 формирования оценок временных позиций областей, алгоритм которого иллюстрирует фиг.5.
На входы блока 35 формирования оценок временных позиций областей поступают следующие сигналы.
На первый вход - массив временных позиций, подлежащих анализу Ri,  с третьего выхода блока 2 управления.
с третьего выхода блока 2 управления.
На второй вход - синфазные и квадратурные составляющие комплексных корреляционных откликов пилот-сигнала Xci, Xsi с выходов комплексных корреляторов 271-27М и 1611-161L
На третий вход - суммы квадратов синфазной и квадратурной составляющих комплексных корреляционных откликов пилот-сигнала Мj, с выходов многоканального блока 28 вычисления суммы квадратов.
На четвертый вход - максимальная сумма квадратов синфазной и квадратурной составляющих комплексных корреляционных откликов пилот-сигнала M1 с выхода блока 32 поиска максимума.
В блоке 35 формирования оценок временных позиций областей последовательно анализируют элементы массива временных позиций, подлежащих анализу Ri,  начиная с первого элемента, группируя временные позиции массива во временные области таким образом, что, если временное расстояние между временными позициями массива меньше, чем чип, то они входят в одну область, в противном случае временные позиции входят в разные области. Определяя первую область, формируют массив временных позиций области τj
начиная с первого элемента, группируя временные позиции массива во временные области таким образом, что, если временное расстояние между временными позициями массива меньше, чем чип, то они входят в одну область, в противном случае временные позиции входят в разные области. Определяя первую область, формируют массив временных позиций области τj и соответствующий массив синфазной и квадратурной составляющих комплексных корреляционных откликов пилот-сигнала области Ycj, Ysj, причем в эти массивы включают только те временные позиции, для которых сумма квадратов синфазной и квадратурной составляющих комплексных корреляционных откликов пилот-сигнала на интервале шага слежения не меньше заданного порога. Величина порога равна, например, произведению постоянного множителя (h=0.1÷0.2) на максимальную сумму М1 квадратов синфазной и квадратурной составляющих комплексного корреляционного отклика пилот-сигнала на интервале шага слежения.
и соответствующий массив синфазной и квадратурной составляющих комплексных корреляционных откликов пилот-сигнала области Ycj, Ysj, причем в эти массивы включают только те временные позиции, для которых сумма квадратов синфазной и квадратурной составляющих комплексных корреляционных откликов пилот-сигнала на интервале шага слежения не меньше заданного порога. Величина порога равна, например, произведению постоянного множителя (h=0.1÷0.2) на максимальную сумму М1 квадратов синфазной и квадратурной составляющих комплексного корреляционного отклика пилот-сигнала на интервале шага слежения.
Определив массив τj, находят такой набор временных позиций из всевозможных наборов временных позиций 
 , входящих в этот массив, причем временное расстояние между временными позициями набора должно быть не менее 1/2 чипа, р - максимальное число компонент одной области, для которого решающая функция (3) максимальна.
, входящих в этот массив, причем временное расстояние между временными позициями набора должно быть не менее 1/2 чипа, р - максимальное число компонент одной области, для которого решающая функция (3) максимальна.


На фиг.5 показан вариант реализации алгоритма, когда р=2.
Временные позиции этого набора принимают за оценку временных позиций компонент, а число временных позиций набора - за оценку числа компонент в исследуемой области р.
Определив оценку временных позиций компонент первой области, переходят к анализу следующей области. Оценку временных позиций компонент последующих областей производят аналогичным образом.
Сумма оценок числа компонент всех областей Zi  с выхода блока 35 формирования оценок временных позиций областей поступает на второй вход блока 36 ограничения числа компонент.
с выхода блока 35 формирования оценок временных позиций областей поступает на второй вход блока 36 ограничения числа компонент.
Блок 2 управления функционирует таким образом, что на выходе он формирует пять сигналов управления:
по сигналу управления с первого выхода блока 2 управления в приемнике 1 поиска периодически с периодом Ts в области многолучевости осуществляют поиск компонент многолучевого сигнала и определяют оценку поиска их числа и временных позиций относительно временного положения опорного сигнала генератора 3 ПСП, которая поступает на первый вход блока 2 управления;
по сигналу управления со второго выхода блока 2 управления на втором и первом выходах генератор 3 ПСП формирует синфазные и квадратурные составляющие опорного сигнала соответственно для информационных и пилот-символов;
по сигналу управления с третьего выхода блока 2 управления временные позиции компонент поступают на вторые входы L узлов 371-37L задержки однолучевых приемников 41-4L сигнала, а остальные, подлежащие анализу временные позиции, - на вторые входы М блоков 261-26М задержки; кроме того, временные позиции и мощности компонент предыдущего шага слежения с третьего выхода блока 2 управления поступают на первый вход третьего блока 31 ранжирования и на первый вход блока 35 формирования оценок временных позиций областей;
по сигналу управления с четвертого выхода блока 2 управления на первый управляемый вход ключа 34 и на четвертый вход блока 36 ограничения числа компонент поступает управляющий сигнал; для первого после процедуры поиска шага слежения он равен, например, логической единице, для последующих шагов - логическому нулю. По этому управляющему сигналу на первый вход блока 33 формирования массива временных позиций, на второй вход третьего блока 31 ранжирования и на третий вход блока 36 ограничения числа компонент на первом шаге с выхода ключа 34 поступают ранжированные по убыванию мощности временные позиции и мощности, найденные в процедуре поиска, а на последующих шагах - временные позиции и мощности компонент предыдущего шага слежения;
с пятого выхода блока 2 управления величины мощности и временных позиций найденных в процедуре поиска компонент, поступают на вход второго блока 30 ранжирования.
Блок 2 управления может быть реализован на современных микропроцессорах.
Анализ заявляемого изобретения проводился методом компьютерного моделирования. На фиг.6 и 7 представлены кривые зависимости вероятности битовой ошибки BER от отношения энергии двоичного символа к спектральной плотности мощности шума Еb/N0 разработанного алгоритма (кривая - «Original») для различных каналов распространения и условий приема (фиг.6 - 2 отсчета на чип входного сигнала, скорость 10 км/ч, длительность символа - 4 чипа, отношение мощности информационных и пилот компонент 4; фиг.7 - 4 отсчета на чип входного сигнала, скорость 120 км/ч, длительность символа - 4 чипа, отношение мощности информационного и пилот компонент 4). Кроме того, на фиг.6 и 7 приведены кривые для альтернативных алгоритмов слежения за многолучевым сигналом. Кривая «Alternative 1» соответствует первому альтернативному алгоритму слежения [1], кривая «Alternative 2» - второму альтернативному алгоритму слежения [5], кривая «Alternative 3» - третьему альтернативному алгоритму слежения [7], кривая - «Potential» - идеальному алгоритму. Под идеальным алгоритмом понимается алгоритм, для которого известны временные позиции компонент многолучевого сигнала. Из результатов моделирования очевидно, что разработанный алгоритм в многолучевых каналах обеспечивает существенный выигрыш в точности приема данных.
Таким образом, введение новых отличительных признаков в способ и устройство согласно описанному изобретению позволяет получить новый технический результат - повысить помехоустойчивость приема сигнала в условиях неразрешаемой многолучевости и уменьшить необходимый ресурс обработки.
Заявляемый способ приема многолучевого сигнала и устройство для его осуществления в отличие от известных технических решений уточняют в процессе слежения не только временные позиции компонент многолучевого сигнала, но также и их число. Алгоритм приема многолучевого сигнала при оценке комплексной огибающей компенсирует взаимовлияние сигналов разных лучей друг на друга, что позволяет получить значительный энергетический выигрыш в условиях неразрешимой многолучевости по сравнению с лучшими известными алгоритмами. При этом помехоустойчивость предлагаемого способа практически не уступает потенциальной (когда априори известны временные позиции компонент многолучевого сигнала). При этом заявляемый способ позволяет уменьшить необходимый ресурс обработки (количество корреляторов).
Изобретение относится к технике приема и декодирования данных различных пользователей в системе связи многопользовательского доступа с кодовым расширением канала. Задача состоит в повышении помехоустойчивости приема сигнала в системе связи многопользовательского доступа с кодовым разделением каналов за счет итеративного совместного детектирования и декодирования данных различных пользователей. Использование авторегрессионного сглаживания мягких решений о достоверности приема кодовых символов многопользовательским детектором, их последующее декодирование с восстановлением всего кодового слова, авторегрессионного сглаживания восстановленных мягких решений с последующим мягким ограничением функцией тангенс гиперболический, а также оценки комплексной огибающей на каждой итерации, позволяет повысить качество приема в системе связи многопользовательского доступа с кодовым расширением канала, т.е. повысить помехоустойчивость приемника, увеличить емкость системы связи, снизить стоимость базовой станции системы с кодовым расширением канала. 2 н. и 2 з.п. ф-лы, 7 ил.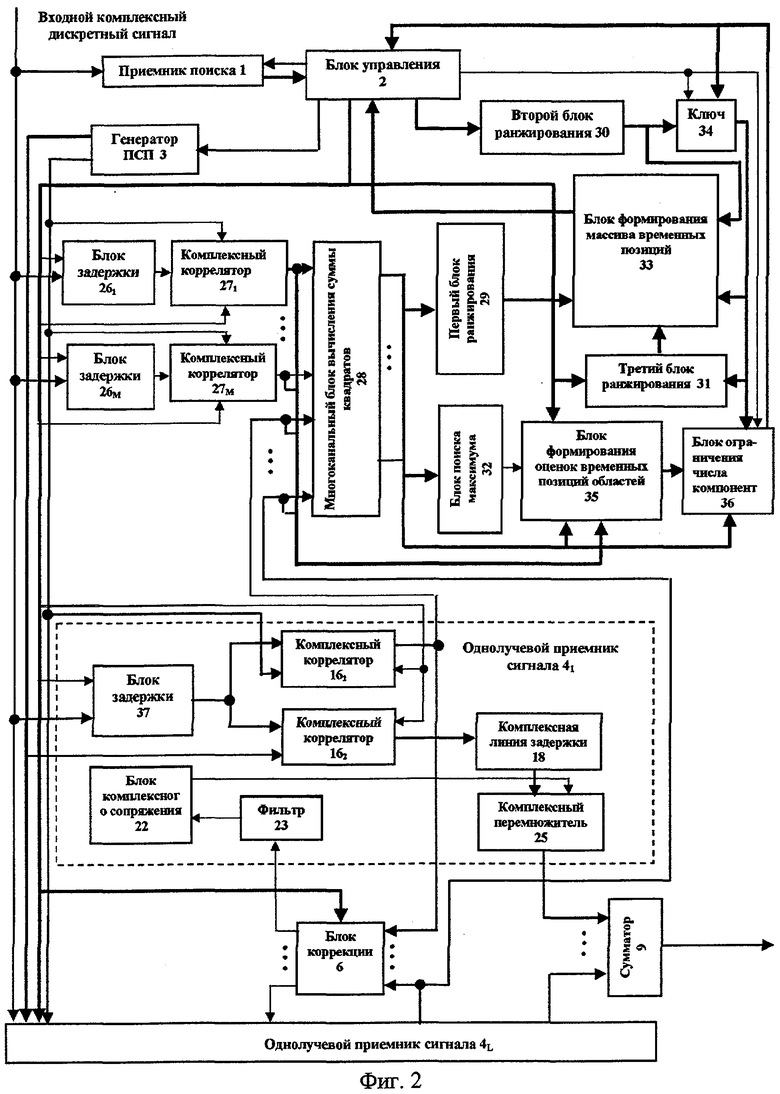
| IEE Journal, On Selected Areos In Communications, Vol., 19, №12, December 2001 | |||
| СПОСОБ КВАЗИКОГЕРЕНТНОГО ПРИЕМА МНОГОЛУЧЕВОГО СИГНАЛА, УСТРОЙСТВО ЕГО РЕАЛИЗУЮЩЕЕ И БЛОК ОБРАБОТКИ СИГНАЛА ОДНОЛУЧЕВОГО КВАЗИКОГЕРЕНТНОГО ПРИЕМНИКА | 2000 |
|
RU2211537C2 |
| СПОСОБ ПРИЕМА МНОГОЛУЧЕВОГО СИГНАЛА, СПОСОБ СЛЕЖЕНИЯ ЗА ЗАДЕРЖКОЙ И РАЗМЕРОМ КЛАСТЕРА СИГНАЛОВ ЛУЧЕЙ И УСТРОЙСТВО, ИХ РЕАЛИЗУЮЩЕЕ | 2002 |
|
RU2208912C1 |
| СПОСОБ ПРИЕМА МНОГОЛУЧЕВЫХ СИГНАЛОВ | 1998 |
|
RU2152131C1 |
| Двигатель внутреннего сгорания | 1981 |
|
SU1041725A2 |
| US 5710768 A, 20.01.1998 | |||
| Прибор для очистки паром от сажи дымогарных трубок в паровозных котлах | 1913 |
|
SU95A1 |

