Изобретение относится к области гидроакустики и может быть использовано для контроля технического состояния подводного объекта непосредственно в натурном водоеме вдали от береговых баз и гидроакустических полигонов.
Известны способы акустического измерения, заключающиеся в регистрации уровня давления шумоизлучения гидроакустическим рабочим средством измерения (РСИ) с остронаправленной характеристикой направленности с последующей обработкой зарегистрированной РСИ информации [1. . . 3] .
Последний из известных способов [3] может быть принят за прототип.
В прототипе в качестве РСИ используют гидроакустическую измерительную антенну, расположенную на дне натурного водоема (гидроакустического полигона).
Недостатком прототипа является невозможность с его помощью контролировать параметры шумоизлучения подводного объекта непосредственно в натурном водоеме вдали от береговых баз и гидроакустического полигона.
Техническим результатом, получаемым от внедрения изобретения, является устранение данного недостатка и получение возможности контроля параметров шумоизлучения подводного объекта непосредственно в натурном водоеме без возвращения объекта к береговым базам.
Данный технический результат достигают за счет того, что в известном способе контроля щумоизлучения подводного объекта в натурном водоеме, заключающемся и в регистрации давления шумоизлучения гидроакустическим РСИ с остронаправленной характеристикой направленности с последующей обработкой зарегистрированной РСИ информации, РСИ устанавливают на самом подводном объекте, а контроль параметров шумоизлучения подводного объекта проводят путем регистрации уровня давления шумоизлучения, отраженного от акустоотраженной поверхности, естественно присутствующей в натурном водоеме.
В качестве акустоотраженной поверхности можно использовать водную поверхность натурного водоема, слой температурного скачка, дно натурного водоема, преимущественно скального грунта, водную поверхность, покрытую льдом, преимущественно молодым, неторосящимся.
В качестве РСИ можно использовать два гидрофона, установленных на верхней или нижней поверхности обшивки корпуса подводного объекта на известном расстоянии друг от друга, преимущественно вдоль линии, параллельной продольной оси объекта и ориентированных характеристиками направленности на акустоотражающую поверхность натурного водоема.
В этом случае при обработке зарегистрированной гидрофонами информации используют взаимокорреляционный анализ последовательно зарегистрированных гидрофонами сигналов.
В качестве РСИ можно использовать и один гидрофон, ориентированный характеристикой направленности на акустоотражающую поверхность, при этом контроль параметров шумоизлучения проводят при неподвижном подводном объекте при работе его механизмов, а при обработке зарегистрированной гидрофоном информации используют автокорреляционный анализ.
В случае же использования двух гидрофонов контролируемый объект направляют параллельно акустоотраженной поверхности.
В других вариантах в качестве акустооотраженной поверхности используют склон преимущественно вертикально ориентированной водной преграды, например, скалы или айсберга, а подводный объект направляют от или к водной преграде. При этом в качестве РСИ используют один или два гидрофона, расположенных вдоль направления движения, а при обработке зарегистрированной гидрофонами информации используют авто- или взаимокорреляционный анализ с учетом доплеровского эффекта.
Существо способа заключается в том, что в натурном водоеме, естественно, присутствуют акустооотраженные поверхности, которые могут отражать звук в той или иной полосе частот.
Так, поверхность моря, если бы была совершенно гладкой, то представляла бы собой почти идеальный отражатель звука. Интенсивность звука, отраженного от гладкой морской поверхности, должна быть очень близка к интенсивности падающего на нее сигнала.
При волнении моря (а в той или иной степени это наблюдается всегда) потери при отражении не равны нулю. На более низких частотах следует ожидать меньших потерь ввиду того, что поверхность моря становится как бы более гладкой по отношению к волне. Кроме того, движение поверхности моря создает эффект расширения частотного спектра тонального сигнала [4] .
Морское дно представляет собой отражающую и рассеивающую границу, имеющую ряд характерных и аналогичных морской поверхности особенностей. Однако данные эффекты более сложны из-за разнообразия типов дна и его многослойной структуры. По составу дно может меняться от твердой скалы до мягкого ила.
В холодных районах Мирового океана у поверхности моря создается изотермический слой, который поддерживается турбулентным ветровым перемешиванием. На границе изотермического слоя наблюдается рефракция звуковых лучей, которые отсутствуют для очень низких частот [4] .
В тропических районах Мирового океана, непосредственно покрытых льдом, хорошую акустоотражающую поверхность представляет поверхность льда. При этом при отражении звука от льда создается эффект полосового фильтра: как высокие, так и низкие частоты, быстро затухают при отражении от льда. Идеальной отражающей поверхностью является молодой неторосящийся лед.
Наличие в натурном водоеме акустоотражающих поверхностей позволяет подводному объекту проконтролировать параметры своего шумоизлучения непосредственно в условиях океана без возвращения на базу. При этом контроль параметров шумоизлучения проводится с учетом коэффициента звукоотражения поверхности, который можно предварительно измерить, или использовать ранее полученные данные о рефракции звуковых лучей.
Изобретение поясняется чертежом, на котором представлены шесть вариантов реализации способа: а) для водной поверхности; б) для слоя температурного скачка; в) для морского дна; г) для ледяной поверхности; д) для склона айсберга; е) для склона подводной скалы.
Для реализации способа на самом подводном объекте 1 располагают гидроакустическое РСИ в виде двух гидрофонов 2 и 3, установленных на верхней обшивке корпуса на известном расстоянии друг от друга, преимущественно вдоль траектории движения объекта 1, например, параллельного поверхности 4.
Характеристики направленности 5 и 6 гидрофонов 2 и 3 ориентированы на водную поверхность 4 (вариант а)).
Для варианта б) гидрофоны 2 и 3 ориентированы характеристиками 5 и 6 на слой 7 температурного скачка, а для варианта г) - на поверхность 8 льда.
Для вариантов в), д), е) и в качестве примеров используется один гидрофон 2, ориентированный своей характеристикой 5 направленности соответственно на дно 9, ледяную поверхность айсберга 10 или водную преграду в виде подводной скалы 11.
Для выделения измеряемого сигнала из дополнительных шумов используют его корреляционную обработку: для вариантов с двумя гидрофонами 2 и 3 - взаимокорреляционную, для вариантов с одним гидрофоном 2 - автокорреляционную.
Причем для вариантов с вертикально ориентированной акустоотражающей поверхностью (варианты д) и е)) при обработке сигнала учитываются доплеровские эффекты.
Подводный объект 1 для упрощения обработки информации для вариантов а), б), г) направляют параллельно акустоотражающей поверхности, а для вариантов д) и е) - перпендикулярно ей (к акустоотражающей поверхности или от нее). Для варианта в) подводный объект 1 зависает над дном 9 в неподвижном состоянии при работе всех механизмов контролируемого объекта.
В зависимости от вида акустооотражающей поверхности гидрофоны 2 и 3 могут располагаться на верхней (варианты б), в)) или нижней (вариант в)) обшивке корпуса объекта 1.
Для вариантов д) и е) гидрофоны располагаются на подводном объекте 1 так, чтобы их характеристики 5 направленности не затенялись частями корпуса объекта.
Способ контроля параметров шумоизлучения подводного объекта реализуется следующим образом.
Подводный объект 1 направляют параллельно (варианты а), б), в), г)) или ортогонально (варианты д), е)) акустооотражающей поверхности 4, или 7, или 8, или 9, или 10, или 11. Шумоизлучение от объекта 1 достигает акустооотражающей поверхности и, отражаясь от нее достигает гидрофонов 2, 3. Корреляционная обработка последовательно зарегистрированных гидрофонами сигналов позволяет по временному принципу выделить сигналы, относящиеся к шумоизлучению объекта.
Таким образом, контроль параметров шумоизлучения подводного объекта проводится непосредственно в натурном водоеме без возвращения объекта на базу, чем достигается поставленный технический результат.
Источники информации
1. Патент 2063106 РФ, кл. H 04 R 29/00, 1992.
2. Патент 2108007 РФ, кл. H 04 R 1/44, 1998.
3. Патент 2010456 РФ, кл. H 04 R 1/44, 1992.
4. Р. Дж. Урик. Основы гидроакустики. "Судостроение", Л. , 1978, стр. 149-189.
Изобретение относится к гидроакустике и касается технологии контроля технического состояния подводного объекта непосредственно в натурном водоеме вдали от береговых баз и гидроакустических измерительных полигонов. Способ контроля заключается в регистрации уровня давления шумоизлучения гидроакустическим рабочим средством измерений с остронаправленной характеристикой направленности с последующей обработкой зарегистрированной рабочим средством измерений информации. Рабочее средство измерений в виде одного или двух гидрофонов устанавливают на самом подводном объекте, а контроль параметров шумоизлучения подводного объекта проводят путем регистрации уровня давления шумоизлучения, отраженного от акустоотражающей поверхности, естественно присутствующей в натурном объеме. В качестве этой поверхности могут быть использованы: водная поверхность натурного водоема, слой температурного скачка, дно натурного водоема, ледовый покров натурного водоема, поверхность подводной скалы или поверхность айсберга. Технический результат реализации изобретения заключается в получении возможности контроля параметров шумоизлучения подводного объекта непосредственно в натурном водоеме без возвращения объекта к береговым базам. 11 з. п. ф-лы, 1 ил.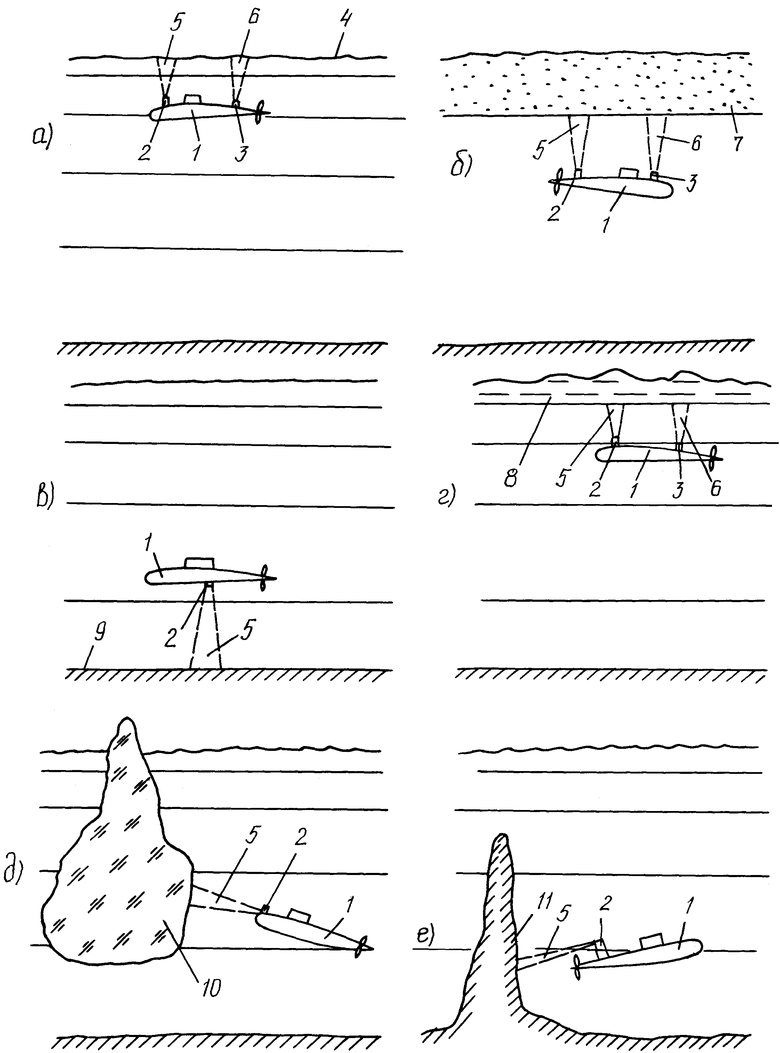
| СПОСОБ ИЗМЕРЕНИЯ УРОВНЯ ЗВУКОВОГО ДАВЛЕНИЯ ГИДРОАКУСТИЧЕСКОГО ИСТОЧНИКА В ЕСТЕСТВЕННОМ ВОДОЕМЕ И ИЗЛУЧАТЕЛЬ ОПОРНЫХ СИГНАЛОВ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2010456C1 |
| US 6118732 А, 12.09.2000 | |||
| Электрический выключатель с выдержкой времени | 1924 |
|
SU1371A1 |

