Изобретение относится к радионавигации и может быть использовано для определения местоположения объекта с повышенной точностью.
Известен способ определения поправок на распространение сигналов СРНС, основанный на учете на местоопределяющем объекте, например, в системе "Навстар", ионосферной и тропосферной рефракции радиоволн (см. В. С. Шебшаевич и др. "Бортовые устройства спутниковой навигации", М. : Транспорт, 1988, с. 176-181).
Этот способ включает следующие операции.
На навигационных искусственных спутниках Земли (НИСЗ) генерируют псевдослучайную последовательность сигналов. Формируют кадры, содержащие кодированную навигационную и служебную информацию, и излучают модулированные сигналы на двух несущих частотах. На местоопределяющемся объекте принимают сигналы навигационных искусственных спутников Земли (НИСЗ), выделяют из кадров навигационную и служебную информацию и измеряют псевдослучайности для момента времени to.
По результатам двухчастотных измерений псевдодальностей определяют величину поправки на время распространения сигналов каждого спутника через слои ионосферы и компенсируют ионосферные задержки.
Рассчитывают по заданным для стандартной атмосферы поправку на рефракцию сигналов НИСЗ в тpопосфеpе и компенсируют тропосферные задержки.
К недостаткам указанного способа следует отнести большую остаточную погрешность моделей ионосферной и тропосферной поправок, а также отсутствие учета (неточностей) сведения шкал времени, погрешностей в расчете эфемерид на момент измерения, в результате чего погрешности измерения псевдодальностей в двухчастотном режиме будут ограничены и не будут значительно отличаться от одночастотного режима.
Известен способ определения поправки на сильнокоррелированную погрешность РНП в дифференциальном режиме системы "Навстар", основанный на формировании интегральной (общей) поправки на корректирующих станциях (КС) как разности между измеренной псевдодальностью и рассчитанной дальностью до каждого спутника на момент измерения, передаче поправок по линиям связи на местоопределяющий объект и вводе поправок, полученных на одной (выбранной) станции в результате измерений псевдодальностей аппаратурой потребителя (см. Откорректированный проект заключительного отсчета специальным комитетом SC N 104. Рекомендованные нормы для дифференциальной службы "Навстар" отсчета RТСМ 9-88/SC-104-62, 1988 г. ). Этот способ выбран в качестве прототипа.
При дифференциальном режиме работы СРНС "Навстар" в зоне корреляции точность определения псевдодальностей повышается по сравнению со стационарным режимом.
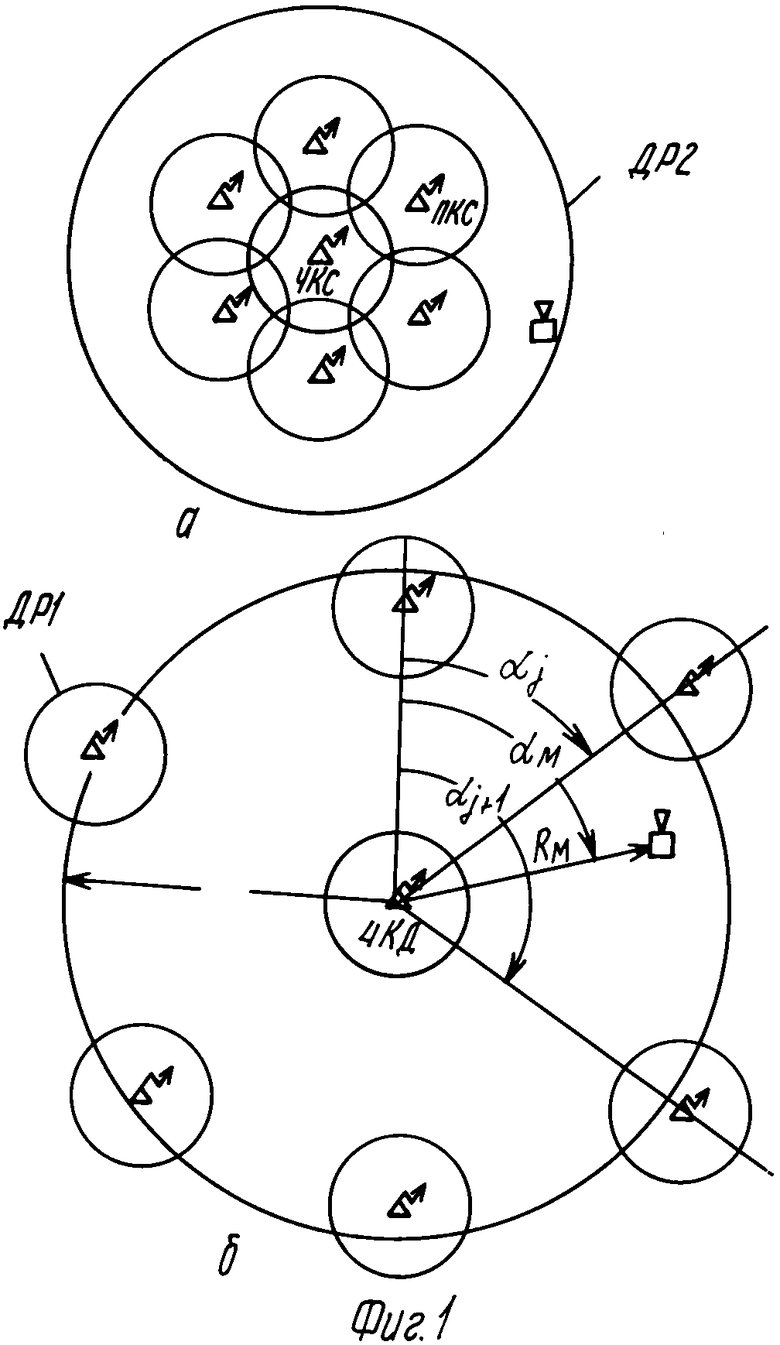
При известном способе размещают корректирующие станции в точках с известными координатами. При этом покрывают сплошные зоны дифференциального режима (см. фиг. 1а); локальные зоны дифференциального режима (см. фиг. 1б). На каждой наземной корректирующей станции (КС) принимают сигналы НИСЗ, измеряют псевдодальности до всех радиовидимых НИСЗ (rизм.i), выделяют данные об эфемеридах НИСЗ.
По известным значениям координат корректирующей станции и полученным данным о текущих эфемеридах НИСЗ находят расчетные величины дальностей (rрасч.i), определяют интегральные поправки к РНП на момент измерения,
Δri(t) = rизмi(t) - rрасчi(t), (1) где rизмi(t) - измеренная псевдодальность до i-го НИСЗ в момент времени t;
rрасчi(t) - расчетная псевдодальность для тех же условий.
Определяют приращение поправок как разницу между значениями поправок на интервале времени Δ t и скорость изменения поправок
Wi=  , (2) где Δ(Δ ri(t) )- приращение поправок i-го спутника;
, (2) где Δ(Δ ri(t) )- приращение поправок i-го спутника;
Δ t - интервал времени между двумя определенными поправками.
Формируют кадры корректирующей информации, содержащие данные о поправках и скорости их изменения.
Модулируют несущую частоту передатчика корректирующей станции сформированными кадровыми сигналами и излучают радиосигналы.
На местоопределяющемся объекте в пределах зоны, ограниченной радиусом корреляции, принимают корректирующие сигналы одной КС, при этом радиус корреляции устанавливают заранее расчетным путем или экспериментально исходя из выполнения условий
σд.р.≅σст.р (3) где σд.р - СКП дифференциального режима в зоне корреляции;
σст.р - СКП стандартного режима СРНС.
Принимают сигналы НИСЗ и измеряют псевдодальности одним из известных способов (см. Шебшаевич В. С. и др. Бортовые устройства спутниковой радионавигации. М. : Транспорт, 1988, с. 62-65).
Выделяют из общего числа поправки к принятым для определения координат псевдодальностям и пересчитывают значения поправок на момент времени измерения этих псевдодальностей, используя следующее выражение:
Δ Zi(tизм) = Δ Zi(tn) + Wi(tизм - tn), где tизм - момент измерения псевдодальности до i-го спутника;
tn - момент излучения поправки к псевдодальности до i-го спутника;
Wi - скорость изменения i-й поправки.
Недостатком известного способа является ограниченная зона применения дифференциального режима, определяемая радиусом корреляции и зависящая от уровня случайных шумовых погрешностей измерения псевдодальностей, эфемеридно-временных погрешностей и времени устаревания корректирующей информации.
Для расширения зоны и обеспечения дифференциального режима на значительной области известным способом необходимо установить большое число корректирующих станций в специально рассчитанных точках так, чтобы соседние локальные районы частично перекрывались. Таким образом, задача получения сплошного района с дифференциальным режимом известным способом в некоторых случаях вообще невыполнима (например, на акватории моря) или экономически не оправдана.
Целью изобретения является расширение зоны действия дифференциального режима (ДР) спутниковой РНС.
Сущность изобретения состоит в том, что на корректирующих станциях, каждая из которых привязана к точке с известными координатами, принимают сигналы радиовидимых навигационных спутников.
Измеряют псевдодальности относительно спутников, сигналы которых приняты на КС. Выделяют из принятых сигналов информацию об эфемеридах спутников и рассчитывают по текущим значениям эфемерид и координатам корректирующих станций псевдодальности.
Формируют сигналы поправок в виде усредненных разностей между измеренными и рассчитанными значениями псевдодальностей и скоростей изменения поправок. Излучают радиосигналы, содержащие информацию о поправках и скоростях их измерения.
На местоопределяющемся объекте принимают сигналы с корректирующей станции и используют полученную информацию в зоне корреляции данной корректирующей станции.
Новым при предлагаемом способе является то, что из группы корректирующих станций выделяют центральную и периферийные. Периферийные станции располагают равномерно по азимуту вокруг центральной.
На центральной станции принимают с периферийных станций сигналы с данными о поправках и скоростях их изменения для всех радиовидимых спутников. Путем совместной обработки поправок центральной станции и с каждой периферийной станции приводят их значения к моменту окончания приема корректирующих сигналов от всех периферийных станций и к единому базовому расстоянию последних от центральной станции. Излучают радиосигналы, содержащие информацию о приведенных базовых поправках и скоростях их изменения.
На местоопределяющемся объекте дополнительно принимают с центральной станции сигналы приведенных периферийных поправок и скоростей их изменения. По известным координатам центральной корректирующей станции и текущим координатам местоопределяющегося объекта определяют азимут направления с центральной станции на местоопределяющийся объект.
Путем сравнения полученного значения азимута направления на местоопределяющийся объект с известными азимутами с центральной на периферийные станции выделяют две периферийные станции, азимут на одну из которых больше, а на другую меньше или равен азимуту с центральной станции на местоопределяющийся объект. По значениям приведенных периферийных поправок двух выделенных станций и азимутов с центральной станции на выделенные периферийные станции и местоопределяющийся объект формируют сигналы промежуточных поправок для азимута на местоопределяющийся объект и базового расстояния.
По известным координатам местоопределяющегося объекта и центральной станции определяют расстояние между станцией и объектом.
С учетом полученного значения расстояния до местоопределяющегося объекта преобразуют промежуточные поправки в местные поправки, которые используются вне зоны корреляции отдельных корректирующих станций.
Таким образом, путем введения перечисленных операций на центральной и периферийных корректирующих станциях и местоопределяющемся объекте определяют значения поправок для базового расстояния до центральной станции и путем использования линейной зависимости поправки от расстояния и линейно-кусочной - от азимута находят значения местных поправок. За счет учета законов изменения поправок в данный момент времени сохраняется высокая точность определения места объекта в более широкой зоне при том же числе корректирующих станций.
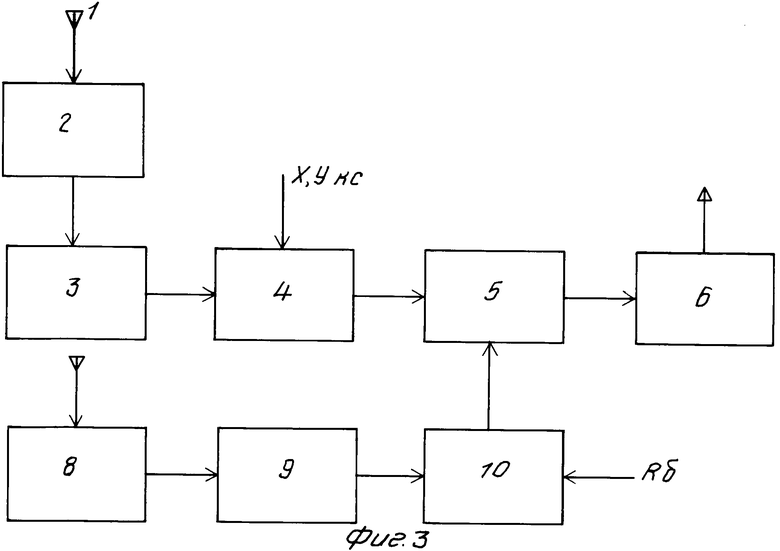
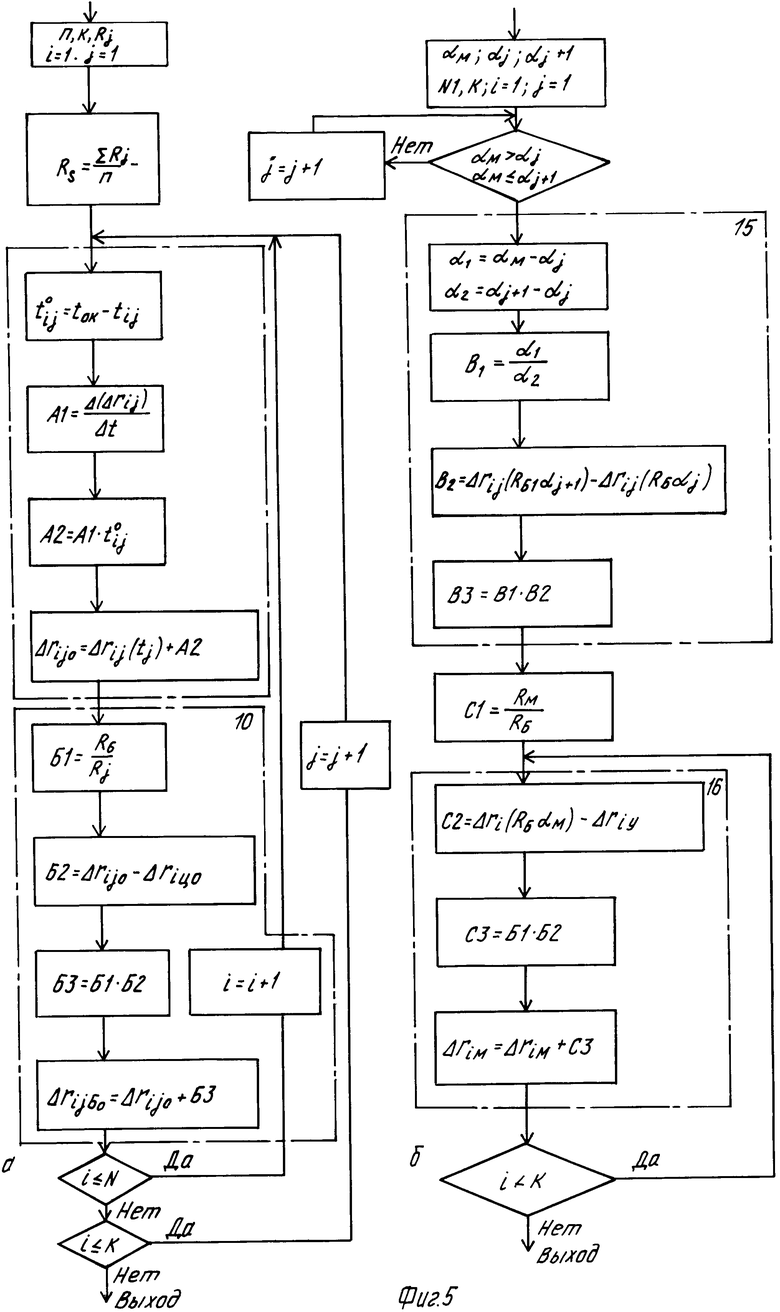
На фиг. 1 показано взаимное расположение корректирующих станций (центральной и периферийных) и местоопределяющегося объекта (а - метод экстраполяции, б - метод интерполяции); на фиг. 2 - графики зависимости поправки псевдодальности от азимута (а) и от расстояния (б); на фиг. 3 - структурная схема центральной корректирующей станции; на фиг. 4 - структурная схема аппаратуры потребителя на местоопределяющемся объекте; на фиг. 5 - схема алгоритма расчета поправок (а - на центральной корректирующей станции; б - на местоопределяющемся объекте); на фиг. 6 - расчет дальности действия дифференциального режима в СРНС.
На чертежах обозначено: 1 - приемная антенна сигналов НИСЗ; 2 - приемник сигналов НИСЗ; 3 - измеритель псевдодальностей; 4 - блок расчета поправок; 5 - формирователь корректирующей информации; 6 - передатчик корректирующей информации; 7 - приемная антенна связи с периферийными корректирующими станциями; 8 - приемник связи; 9 - декодер; 10 - блок пересчета периферийных поправок; 11 - приемная антенна сигналов коррекции; 12 - приемник корректирующей информации; 13 - декодер; 14 - переключатель режима; 15 - блок расчета промежуточных поправок; 16 - блок расчета местных поправок.
Способ характеризуется совокупностью следующих операций.
Выделяют из совокупности корректирующий станций центральную - ЦКС и группу периферийных станций - ПКС (см. фиг. 1, а, б).
Размещают периферийные станции равномерно по азимуту вокруг центральной станции, при этом максимальное удаление от центральной станции должно быть ограничено условием сохранения линейной зависимости величины поправки от расстояния.
Рассчитывают единое базовое расстояние (RБ) для всех периферийных станций, например, по среднему расстоянию от центральной станции
RБ=  , (4) где Rj - расстояние до j-й периферийной станции;
, (4) где Rj - расстояние до j-й периферийной станции;
n - число периферийных станций. За базовое расстояние может быть принята и другая постоянная величина, например 500 км. Все корректирующие станции привязывают к точкам с точно известными координатами, используя, например, государственную геодезическую сеть. На корректирующих станциях с известными координатами принимают сигналы радиовидимых навигационных спутников и измеряют псевдодальности до всех радиовидимых спутников.
Измерение псевдодальностей в спутниковой РНС выполняется известными способами (см. например Шебшаевич В. С. и др. Сетевые спутниковые радионавигационные системы. М. : Радио и связь, 1982, с. 87-95).
Из принятых навигационных сигналов выделяют данные об эфемеридах навигационных спутников. По принятым данным формируют известным способом текущую эфемеридную информацию (см. там же, с. 107-109). Используя известные значения координат корректирующих станций и сформированные координаты НИCЗ на момент измерения, находят расчетные значения псевдодальностей (см. там же, с. 136-141). Формируют сигнал поправки для каждого спутника в виде усредненной разности между измеренной ( ) и рассчитанной (
) и рассчитанной ( ) псевдодальностями:
) псевдодальностями:
Δrij(t)=  (t)-
(t)- (t), (5) где i - номер НИСЗ;
(t), (5) где i - номер НИСЗ;
j - номер корректирующей станции;
t - момент измерения. Находят скорость изменения поправок
Wij=  , (6) где Δ t - интервал времени между двумя определениями поправок.
, (6) где Δ t - интервал времени между двумя определениями поправок.
Передают корректирующую информацию (КИ) на местоопределяющийся объект и центральную корректирующую станцию.
На центральной корректирующей станции принимают сигналы с периферийных станций с данными о поправках к РНП и скоростях их изменения для всех радиовидимых спутников.
Приводят значения поправок для псевдодальностей к моменту окончания приема корректирующей информации (tои) в соответствии с выражением
Δrij= Δrij(t)+W
Wij* - скорость изменения поправки по i-му НИСЗ, полученная на j-й корректирующей станции;
tои - момент окончания приема КИ.
Выделяют для совместной обработки сигналы поправок центральной станции и каждой периферийной станции. Используя совместно поправки двух станций (центральной и периферийной) и принятое единое базовое расстояние RБ, пересчитывают периферийные поправки для каждой станции к базовому расстоянию для момента времени tои по следующей формуле:
Δrij(RБ, αj)= Δriц+  RБ, (8) где Δ rij(RБj) - значение поправки в точке с координатами RБ, αj - относительно центральной станции;
RБ, (8) где Δ rij(RБj) - значение поправки в точке с координатами RБ, αj - относительно центральной станции;
Δ riц - значение поправки на центральной станции для i-го спутника;
Δ rij(Rj αj) - значения поправки на периферийной станции для i-го спутника;
Rj - расстояние до j-й периферийной станции;
αj - азимут на j-ю периферийную станцию;
RБ - базовое расстояние.
Излучают сигналы, содержащие корректирующую информацию, на местоопределяющийся объект. На местоопределяющемся объекте в зоне корреляции одной корректирующей станции принимают сигналы этой станции и используют их для коррекции результатов измерения псевдодальностей.
Вне зоны корреляции отдельной станции на местоопределяющемся объекте дополнительно принимают с центральной станции сигналы приведенных периферийных поправок и скоростей их изменения. По известным координатам центральной корректирующей станции и ткущим координатам местоопределяющегося объекта определяют азимут направления с центральной станции на местоопределяющийся объект ( αм).
Используя известные азимуты направлений с центральной станции на периферийные корректирующие станции (αj) для сравнения с азимутом на местоопределяющийся объект. Выделяют путем сравнения полученного значения азимута на местоопределяющийся объект с азимутами на периферийные станции две корректирующие станции, для которых выполняются условия
αj<αм≅αj+1, (9) где αj, αj+1 - азимуты на две соседние периферийные станции;
αм - азимут на местоопределяющийся объект.
С использованием базовых поправок для выделенных периферийных станций, известных азимутов с центральной на периферийные станции и местоопределяющийся объект формируют сигналы промежуточных поправок в соответствии с выражением
Δri,м(RБ, αм)= Δrij(RБ, αj)+  (αj+1-αм), (10) где Δ riм(RБ , αм) - промежуточная поправка для i-го НИСЗ в точке с координатами RБ и αм относительно центральной станции;
(αj+1-αм), (10) где Δ riм(RБ , αм) - промежуточная поправка для i-го НИСЗ в точке с координатами RБ и αм относительно центральной станции;
Δ rij, RБ, αj - то же, в точке с координатами RБ и αj (первая ПКС);
Δ ri,j+1(RБ, αj+1) - то же, в точке с координатами RБ и αj+1(вторая ПКС);
αм, αj, αj+1 - азимуты с центральной станции соответственно на местоопределяющийся объект, на пару выделенных ПКС.
По известным координатам местоопределяющегося объекта и центральной станции определяют расстояние между станцией и объектом.
Преобразуют сигналы промежуточных поправок в местные поправки в соответствии с выражением:
Δri,м(Rм, αм)= Δriц+  Rм, (11) где Δriм - значение местной поправки для i-го НИСЗ в точке нахождения местоопределяющегося объекта.
Rм, (11) где Δriм - значение местной поправки для i-го НИСЗ в точке нахождения местоопределяющегося объекта.
Используют полученные местные поправки, приведенные к моменту выполнения измерений, для корректировки псевдодальностей.
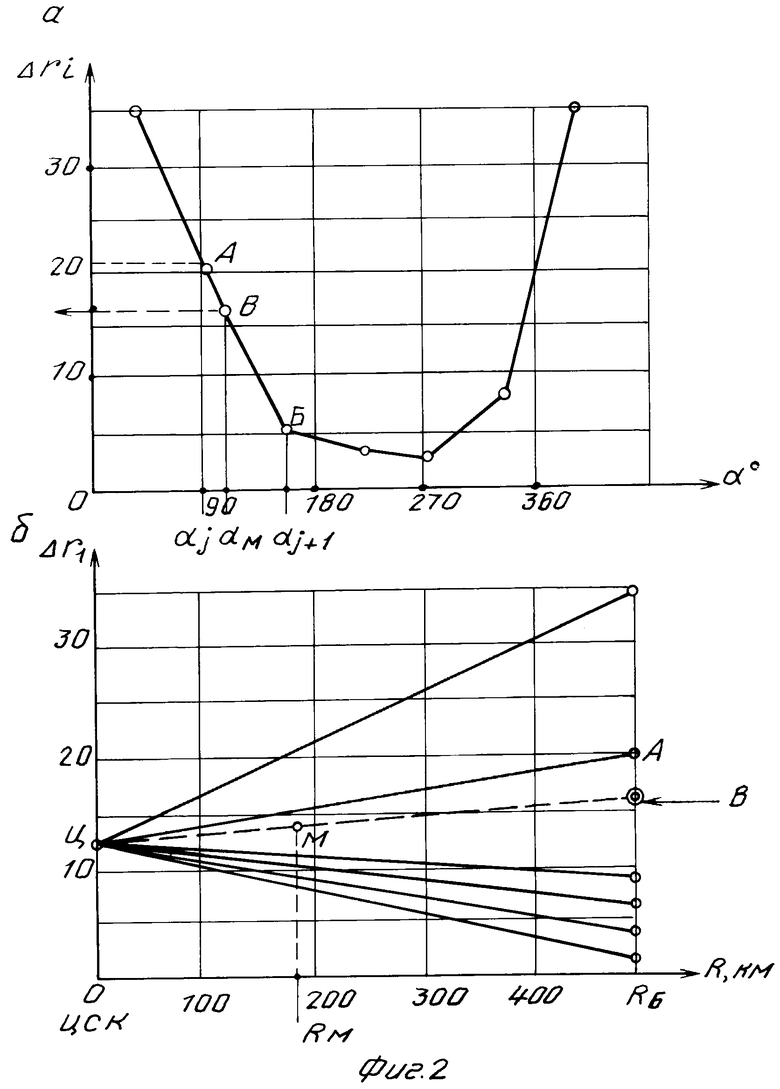
Графики, поясняющие способ определения местных поправок на местоопределяющемся объекте приведены на фиг. 2 а, б, где Δ ri(α ) и Δri(R) - значения поправок i-го НИСЗ в зависимости от азимута с центральной корректирующей станции α и расстояния R,
·ц - значение поправки на центральной станции;
о - значения поправок, полученные на периферийных станциях и приведенные к базовому расстоянию RБ;
⊙в - значение промежуточной поправки для базового расстояния;
·м - местная поправка.
По значениям Δri(αj)иΔ ri(αj+1) (см. точки А и Б на фиг. 2, а) находят точку В, соответствующую базовой промежуточной поправке для азимута αм.
Далее переносят точку В на график Δri = f(e) (см. фиг. 2, б), проводят прямую между точками ц и в, определяют местную поправку для дальности Rм (точка М).
На корректирующей центральной станции (фиг. 3), работающей по предложенному способу, к выходу приемной антенны спутниковых сигналов 1 последовательно подсоединены радиоприемник 2, измеритель псевдодальностей 3, блок расчета поправок 4, формирователь корректирующей информации 5, передатчик с антенной 6, а к выходу приемной антенны сигналов периферийных станций 7 последовательно подсоединены приемник связи с периферийными станциями 8, декодер 9 и блок пересчета периферийных поправок 10, выход которого соединен с вторым входом формирователя 5.
На корректирующих периферийных станциях, пример расположения которых приведен на фиг. 1, последовательно подсоединены приемная антенна спутниковых сигналов 1, радиоприемник 2, измеритель псевдодальностей 3, блок расчета поправок 4, формирователь корректирующей информации 5, передатчик с передающей антенной 6.
На местоопределяющемся объекте (см. фиг. 4) к выходу приемной антенны 11 последовательно подключены приемник 12, декодер 13, переключатель 14, блок расчета промежуточных 15 и местных поправок 16, при этом второй вход переключателя подключен к выходу блока расчета местных поправок.
Большинство блоков корректирующей станции и аппаратуры местоопределяющегося объекта, известны и используются в радиотехнических системах. Дополнительные блоки на центральной корректирующей станции и на местоопределяющемся объекте, могут быть построены на базе вычислительной техники и с использованием предложенных алгоритмов.
Алгоритм пересчета периферийных поправок начинается с записи числа корректирующих станций (n), числа принимаемых спутников (К), расстояний до корректирующих периферийных станций (Rj).
Кроме того, записываются время измерения поправки для i-го спутника на j-й станции (tij) и время окончания измерений (tок), а также величины поправок для всех спутников по всем периферийным станциям Δ rij и поправки, полученные на центральной станции ( Δ rij).
Последовательно путем арифметических действий находят базовые расстояния RБ, разность (tок - tij), скорость изменения поправки, приращение поправки за время tijo, значение поправки на момент времени tок. В блоке 10 определяют отношение базового расстояния RБ к расстоянию до j-й станции (Rj), разность между погрешностями, полученными на периферийных и центральных станциях, произведение двух полученных величин и значения базовых поправок на моменты времени tок.
Аналогично в два этапа рассчитывают местные ошибки.
Положительный эффект при осуществлении предложенного способа по сравнению с прототипом рассматривался с учетом следующего: определяющими погрешностями в спутниковых РНС являются систематические погрешности; систематические погрешности, равные сумме погрешностей эфемерид и ухода шкалы времени, погрешностей за счет ионосферной и тропосферной рефракции радиоволн, являются сильнокоррелированными по расстоянию между точками на поверхности Земли; в пределах до 1000-1500 км значения частотных погрешностей, а следовательно, и суммарной погрешности линейно изменяются при удалении от центральной станции; закон изменения погрешностей от угла более сложный, но с высокой точностью может быть представлен кусочно-линейной функцией. Положительный эффект, выражающийся в увеличении зоны действия дифференциального режима при сохранении точности системы и одинаковом числе корректирующих станций можно оценить следующим образом.
Найдем расстояние, ограничивающее зону дифференциального режима.
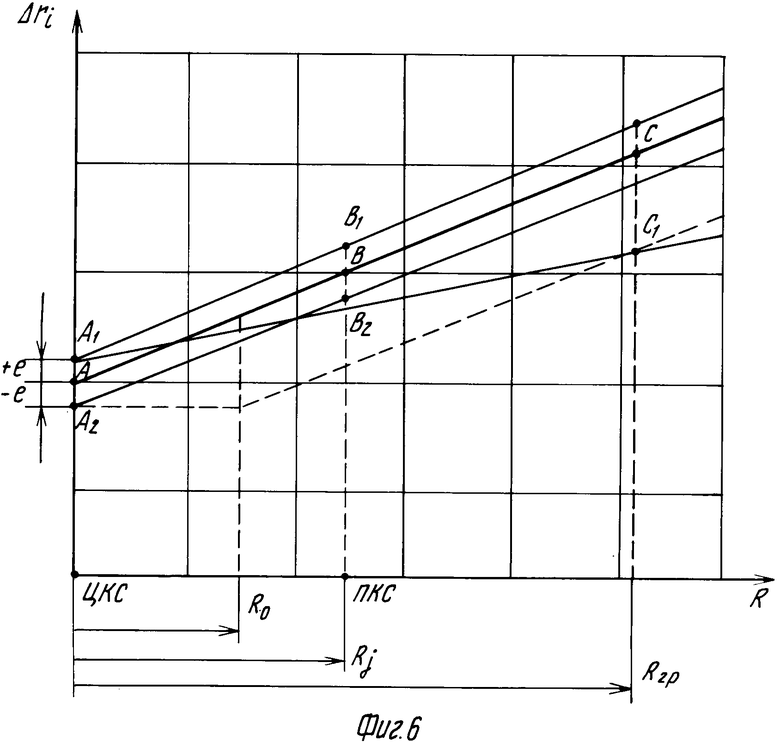
В этой расширенной зоне погрешности предлагаемого способа не должны превышать погрешности известного способа на границе зоны корреляции (Ro). Погрешность на границе зоны корреляции по одной станции состоит из двух составляющих и равна
σгр= Rotgβ±l, где β - угол наклона функции Δ ri = f(R);
l - шумовая погрешность;
Ro - радиус корреляции.
Рассмотрим график, приведенный на фиг. 6.
Точки А и В соответствуют истинным значениям поправок на ЦКС и ПКС. Линия, проведенная через эти точки, выражает функцию Δ ri = f(R). Из-за шумовых погрешностей определение поправок на КС выполняется с ошибкой ±l.
Для наиболее неблагоприятного случая, когда погрешности на станциях имеют разный знак, линия Δ ri(R) пройдет через точки А1 и В2. Из-за изменения наклона Δ ri(R) местная поправка определится с погрешностью, которая выражается на графике отрезком С-С1.
Аналитически предполагаемая зависимость изменения поправки с учетом выполнения измерений выражается следующей формулой:
Δri(R)= Δriц+ l+  tgβ -
tgβ -  R, (12) где Rj - удаление до периферийной станции.
R, (12) где Rj - удаление до периферийной станции.
Проведем линию, параллельную АС и удаленную на σгр. Эта прямая выражает зависимость
Δr
Решая совместно формулы (12) и (13), получим точку пересечения С1, которая определит граничный радиус (Rгр) зоны дифференциального режима
Rгр=  ·Rп (14) Для существующих приемоиндикаторов инструментальная погрешность измерения не превышает 3-5 м. С учетом условий распространения радиоволн изменение поправки на границе зоны корреляции достигает 15-20 м. Тогда получим
·Rп (14) Для существующих приемоиндикаторов инструментальная погрешность измерения не превышает 3-5 м. С учетом условий распространения радиоволн изменение поправки на границе зоны корреляции достигает 15-20 м. Тогда получим
Rгр = (4,0 - 7,1) ˙ Rп Если Rп = 500 км, то Rгр = 2000-3500 км. Оценим увеличение площади зоны NS при использовании предлагаемого способа
NS=  =
=  , (15) где Кс - число корректирующих станций. Можно ограничиться Кс= 7. Принято, что Ro = 300 км. Тогда NS = 7-26, т. е. площадь зоны дифференциального режима увеличивается в среднем на порядок (при сохранении числа корректирующих станций).
, (15) где Кс - число корректирующих станций. Можно ограничиться Кс= 7. Принято, что Ro = 300 км. Тогда NS = 7-26, т. е. площадь зоны дифференциального режима увеличивается в среднем на порядок (при сохранении числа корректирующих станций).
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ДЛЯ ДИФФЕРЕНЦИАЛЬНЫХ ПОПРАВОК К ИЗМЕРЯЕМЫМ КООРДИНАТАМ ПОДВИЖНОГО ОБЪЕКТА | 1986 |
|
SU1840575A1 |
| СПУТНИКОВАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА | 1977 |
|
SU1840714A1 |
| СПОСОБ ВЫСОКОТОЧНЫХ ИЗМЕРЕНИЙ ТРАЕКТОРНЫХ КООРДИНАТ ЛЕТАТЕЛЬНОГО АППАРАТА В ЛЕТНЫХ ИССЛЕДОВАНИЯХ НА ТРАССАХ БОЛЬШОЙ ПРОТЯЖЕННОСТИ | 2008 |
|
RU2393430C1 |
| РАДИОНАВИГАЦИОННАЯ СИСТЕМА | 1989 |
|
RU2030755C1 |
| СИСТЕМА СИНХРОНИЗАЦИИ ЧАСОВ ПО РАДИОКАНАЛУ | 1995 |
|
RU2080646C1 |
| СИСТЕМА СИНХРОНИЗАЦИИ ЧАСОВ ПО РАДИОКАНАЛУ | 1995 |
|
RU2115946C1 |
| СПОСОБ ДИФФЕРЕНЦИАЛЬНОЙ НАВИГАЦИИ | 1999 |
|
RU2155969C1 |
| СПОСОБ ИЗМЕРЕНИЯ ЗАДЕРЖКИ ПСЕВДОСЛУЧАЙНОЙ ПОСЛЕДОВАТЕЛЬНОСТИ ИМПУЛЬСОВ | 1990 |
|
RU2012147C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА ПО СИГНАЛАМ ГЛОБАЛЬНЫХ НАВИГАЦИОННЫХ СПУТНИКОВЫХ СИСТЕМ | 2012 |
|
RU2490665C1 |
| ПРИЕМОКООРДИНАТОР | 1990 |
|
RU2065612C1 |

Изобретение относится к радионавигации и может использоваться при определении местоположения объекта. Способ определения дифференциальных поправок к радионавигационному параметру в спутниковой радионавигационной системе включает прием сигналов радионавигационных спутников на наземных корректирующих станциях с известными координатами, измерение псевдодальностей до каждого спутника, выделение из принятых сигналов эфемеридной информации, расчет по текущим значениям эфемерид и координатам корректирующих станций псевдодальности, определение поправок в виде усредненных разностей между измеренными и расчетными значениями псевдодальностей и скоростей изменения поправок, передачу информации о поправках и скоростях их изменения на местоопределяющийся объект. Для расширения зоны с действия радионавигационной системы на центральной станции проводят совместную обработку сигналов с данными о поправках, полученных с периферийных станций. 6 ил.
СПОСОБ ОПРЕДЕЛЕНИЯ ДИФФЕРЕНЦИАЛЬНЫХ ПОПРАВОК к радионавигационному параметру в спутниковой радионавигационной системе, основанный на том, что на наземных корректирующих станциях, каждая из которых привязана к точке с известными координатами, принимают сигналы радионавигационных спутников, относительно каждого из которых измеряют всевдодальности, выделяют из принятых сигналов информацию об эфемеридах спутников, рассчитывают по текущим значениям эфемерид и координатам корректирующих станций псевдодальности, формируют сигналы поправок в виде усредненных разностей между измеренными и расчетными значениями псевдодальностей и скорость изменения сигналов поправок, излучают радиосигналы, содержащие информацию о поправках и скоростях изменения, на местоопределяющемся объекте принимают сигналы с корректирующей станции и используют полученную информацию в зоне корреляции для данной корректирующей станции, отличающийся тем, что, с целью расширения зоны действия дифференциального режима спутниковой радионавигационной системы, из группы корректирующих станций выбирают центральную и периферийные, причем периферийные станции расположены равномерно по азимуту вокруг центральной, на центральной станции принимают с периферийных станций сигналы с данными о поправках и скоростях их изменения для всех радиовидимых спутников, путем совместной обработки поправок центральной станции с каждой периферийной приводят их значения к моменту окончания приема корректирующих сигналов от всех периферийных станций и к единому базовому расстоянию последних от центральной станции, излучают радиосигналы, содержащие информацию о приведенных поправках и скоростях их изменения, на местоопределяющемся объекте дополнительно принимают с центральной станции сигналы приведенных периферийных поправок и скоростей их изменения, по известным координатам центральной корректирующей станции и текущим координатам местоопределяющегося объекта определяют азимут направления с центральной станции на местоопределяющийся объект, путем сравнения полученного значения азимута на местоопределяющийся объект с известными азимутами с центральной на периферийные станции выделяют две периферийные станции, азимут на одну из которых больше, а другую - меньше или равен азимуту с центральной станции на местоопределяющийся объект, по значениям приведенных периферийных поправок двух выделенных станций и азимута с центральной на выделенные периферийные станции и местоопределяющийся объект формируют сигналы промежуточных поправок для азимута на местоопределяющийся объект и базового расстояния, по известным координатам местоопределяющегося объекта и центральной станции определяют расстояние между станцией и объектом, с учетом полученного значения расстояния преобразуют промежуточные поправки в местные, которые используют вне зоны корреляции отдельных корректирующих станций.
