Изобретение относится к неразрушающему контролю промышленных объектов, основанному на регистрации акустических волн с помощью контактных приемных преобразователей, а именно - к ультразвуковым пьезоэлектрическим приемным преобразователям, и может быть использовано, в частности, для контроля трубопроводов и объектов с криволинейной (нелинейной) поверхностью, в процессе которого регистрируются акустические волны длиной, сравнимой с размерами преобразователя.
Эффективность ультразвукового контроля трубопроводов и объектов с нелинейной поверхностью, основанного на регистрации акустических волн с помощью контактных датчиков, связано с качеством крепления (качеством акустического контакта) приемного преобразователя с контролируемым объектом. Обеспечение надежного акустического контакта весьма проблематично в условиях ограниченного доступа к контролируемым изделиям и, особенно, при контроле трубопроводов с грубо обработанными или корродированными поверхностями. Данная проблема сопряжена с рядом особенностей указанного метода контроля:
- поперечный размер приемного преобразователя (в большинстве случаев имеющего плоский протектор) соизмерим как с кривизной поверхности контролируемого объекта, так и с длиной принимаемой акустической волны, что способствует интерференции в слое иммерсионной жидкости, являющейся основной причиной нестабильности акустического контакта;
- сложная конфигурация контролируемого оборудования, неопределенность параметров упругих колебаний и волн в месте их возникновения, разнообразие мод колебаний контролируемых объектов снижают информативность ультразвукового контроля;
- при контроле оборудования с высоким уровнем посторонних механических шумов, обусловленных турбулентным движением жидкости, процессами ее кипения и кавитации, необходимо выделить (селектировать) определенную моду колебаний, несущую полезную информацию о возникших и зарождающихся дефектах. В практическом большинстве случаев (например, при контроле трубопроводов или тонкостенных конструкций) обнаружение дефектов может осуществляться путем анализа распространяющихся в пластинах и оболочках волн Лэмба. Для этого приемный преобразователь должен обладать доминирующей чувствительностью к волнам с периодической гребенчатой структурой по сравнению с чувствительностью к объемным волнам;
- для определения координат источника ультразвуковых колебаний и векторных характеристик акустического поля волн (например, для определения направления распространения ультразвуковых волн) необходимы измерения, по крайней мере, в трех точках контролируемой поверхности.
Решение поставленных задач усложняется еще и проблемами крепления преобразователей на изделия с нелинейной поверхностью. Для установки, например, датчиков акустической эмиссии на стальные трубопроводы применяются магнитные держатели, включающие не менее двух магнитов, контактирующих с контролируемой поверхностью в непосредственной близости к преобразователю. Магнитные держатели также имеют плоскую установочную поверхность, что может привести к нестабильности усилия поджатия и акустического контакта.
Известен контактный наконечник пьезопреобразователя [1] для контроля нелинейных поверхностей, контактная поверхность которого выполнена в виде трех выпуклых полусфер. Однако данный контактный наконечник не обладает свойством селекции определенной моды колебаний, поскольку акустические сигналы, поступающие в пьезоэлемент через полусферы, суммируются и не могут быть разделены при дальнейшем анализе. Ультразвуковой преобразователь на основе такого контактного наконечника реагирует равным образом как на воздействие волн с периодической гребенчатой структурой, несущих полезную информацию о дефектах оборудования, так и объемных волн, возникающих при неинформативных динамических явлениях (например, турбулентном движении) в газовой или жидкой среде, граничащей с контролируемым объектом. Кроме того, для определения координат источника волн Лэмба необходимо применение, по крайней мере, трех преобразователей, отстоящих друг от друга на расстоянии, обеспечивающем корреляцию сигналов в рабочей полосе частот.
Наиболее близким по технической сущности является пьезоэлектрический преобразователь для регистрации акустической эмиссии высокотемпературных объектов [2] , состоящий из одного чувствительного элемента, соединенного с корпусом тонкой мембраной. Корпус снабжен тремя опорами. Чувствительный элемент включает пьезоэлемент, установленный на цилиндрической части несущей опоры, сужающаяся часть которой обращена к контролируемому объекту. Несущая опора выступает за пределы опор корпуса. Прием ультразвуковых волн производится через несущую опору, соприкасающуюся с поверхностью контролируемого объекта. При приложении определенного усилия поджатия преобразователь в результате прогиба мембраны устанавливается на исследуемой поверхности в четырех точках (относительно малой по площади контактной поверхности): на трех опорах и несущей опоре. Устройство преобразует энергию акустического сигнала в электрический сигнал в точке соприкосновения несущей опоры с поверхностью контролируемого объекта. У данного преобразователя так же, как и у аналога, отсутствует свойство селекции волн с периодической гребенчатой структурой и для определения координат дефектов оборудования необходимы три таких датчика.
Задача, решаемая изобретением, направлена на создание полосового ультразвукового пьезоэлектрического приемного преобразователя (в дальнейшем по тексту - преобразователя), предназначенного для контроля объектов с нелинейной поверхностью.
Техническим результатом настоящего изобретения является повышение информативности измерений при контроле объектов, источником механического шума которых является неинформативные динамические явления в газовой или жидкой среде, граничащей с контролируемым объектом.
Технический результат достигается тем, что в известный ультразвуковой пьезоэлектрический приемный преобразователь, содержащий в корпусе чувствительный элемент, состоящий из опоры, часть которой выполнена в виде цилиндра с установленным на нем пьезоэлементом, а другая часть опоры выполнена сужающейся в сторону контролируемого объекта и выступающей за пределы корпуса, дополнительно введены два чувствительных элемента и акустически развязывающая матрица с тремя отверстиями. В отверстиях жестко закреплены чувствительные элементы, при этом их оси симметрии совпадают с боковыми ребрами пятигранника, нижнее основание которого обращено к контролируемому объекту и образовано прямыми, проходящими через контактные точки сужающихся частей опор. Внутри пятигранника размещено крепежное устройство. Длина любой стороны нижнего основания пятигранника выбрана из условия
где са - скорость волны Лэмба или Рэлея в контролируемом объекте;
f1 - нижняя граничная частота полосы пропускания;
L - длина любой стороны основания пятигранника;
5≤К≤20 - эмпирический коэффициент;
f2 - верхняя граничная частота полосы пропускания.
С целью повышения стабильности акустического контакта с выпуклой поверхностью контролируемого объекта пятигранник является усеченной пирамидой, меньшее основание которой обращено в сторону контролируемого объекта.
С целью повышения стабильности акустического контакта с вогнутой поверхностью контролируемого объекта пятигранник является усеченной пирамидой, большее основание которой обращено в сторону контролируемого объекта.
С целью упрощения конструкции и технологии изготовления матрица выполнена в виде тела, обладающего симметрией вращения третьего порядка.
С целью упрощения конструкции и технологии крепления к контролируемому объекту крепежное устройство выполнено в виде подпружиненного элемента, установленного с возможностью соединения с контролируемым объектом, причем ось симметрии крепежного устройства перпендикулярна нижнему основанию пятигранника и пересекает его центр тяжести.
С целью упрощения технологии изготовления матрица выполнена из жидкого материала, преимущественно содержащего испаряющиеся при отвердевании компоненты и принимающего геометрическую форму и пористость в технологической форме.
Повышение информативности измерений при контроле объектов, источником механического шума которых является неинформативные динамические явления в газовой или жидкой среде, граничащей с контролируемым объектом, достигается новыми функциональными свойствами преобразователя, а именно: возможностью селекции среди механического шума определенной моды колебаний, преимущественно, волн Лэмба или Рэлея, несущих полезную информацию о зарождающихся и развивающихся дефектах оборудования, а также возможностью определения линейных координат источника ультразвуковых колебаний и других векторных характеристик акустического поля волн с периодической гребенчатой структурой по показаниям трех чувствительных элементов, расположенных на определенном расстоянии друг от друга. Наряду с этим, достижению технического результата изобретения способствует надежный акустический контакт с любой нелинейной поверхностью, обеспечиваемый опорой преобразователя в трех точках (контактной поверхности, размер которой существенно меньше длины волны в контролируемом объекте). Такая трехточечная опора допускает контроль изделий с грубо обработанной поверхностью и содействует разрушению корродированного слоя без зачистки под действием относительно небольшого усилия поджатия, осуществляемого оператором при установке преобразователя.
Размещение крепежного устройства внутри пятигранника позволяет относительно равномерно распределить усилие поджатия на три опоры, что также способствует стабильности акустического контакта и, соответственно, повышению информативности измерений.
Неравенство
ограничивает размеры нижнего основания пятигранника и соответственно матрицы, исходя из условий распознавания волнового характера акустического поля волн Лэмба или Рэлея и максимального размера акустического поля объемных волн, в пределах которого их фронт можно считать плоским. При этом нижняя граница длины любой стороны указанного основания пятигранника
равна максимальной длине полуволны Лэмба или Рэлея в контролируемом объекте, ниже которой преобразователь работает как точечный приемник акустических волн, в результате чего теряется информация о векторных характеристиках акустического поля волн. Верхняя граница длины любой стороны нижнего основания пятигранника
обусловлена степенью кривизны фронта падающих на поверхность (внутреннюю или внешнюю) контролируемого объекта объемных волн, вызванных неинформативными динамическими явлениями в газовой или жидкой среде, а также габаритами и конструктивными особенностями контролируемого объекта. В реальных объектах не существуют объемные волны с плоским фронтом, однако при рассмотрении части акустического поля объемных волн с определенной погрешностью их фронт можно полагать плоским. Эмпирический коэффициент К показывает допустимое число волн Лэмба или Рэлея, которое укладывается в размер L, чтобы считать фронт падающих объемных волн плоским. Пределы эмпирического коэффициента обуславливаются соотношениями размеров контролируемого объекта и длины объемной (продольной) волны в газе или жидкости, а также степенью кривизны поверхности контролируемого объекта. Чем крупнее контролируемый объект, меньше кривизна его поверхности и чем выше скорость звука в среде, граничащей с контролируемым объектом, и соответственно больше длина волны, тем шире и менее искривлен фронт падающих на внутреннюю или внешнюю поверхность контролируемого объекта объемных волн. И наоборот, чем меньше по размерам контролируемый объект, чем больше его кривизна и меньше длина падающей объемной волны, тем сложнее выделить определенную моду колебаний в результате схожести волновых картин смещений поверхности контролируемого объекта, вызванных тем или иным типом волны. К тому же, по мере увеличения отношения размера L к длине волны Лэмба или Рэлея в контролируемом объекте уменьшается связь (корреляция) параметров акустических сигналов в точках соприкосновения опор из-за потерь, связанных с отражением, рассеянием, преломлением и поглощением волн. Таким образом, нижний предел эмпирического коэффициента (5) показывает максимально допустимое число волн Лэмба или Рэлея, которое укладывается в размере L, для малогабаритных конструкций с нелинейной поверхностью или объектов, эксплуатация которых сопровождается повышенным механическим шумом, а верхний предел эмпирического коэффициента (20) - допустимое число волн для крупногабаритных конструкций или объектов с относительно небольшим уровнем механического шума.
Свойство матрицы, как акустической развязки элементов преобразователя (чувствительных элементов и корпуса), способствует уменьшению взаимовлияния и соответственно повышению информативности измерений. Данная функция матрицы может быть реализована, например, за счет существенного (по крайней мере, в 5 - 8 раз) различия характеристических импедансов сопрягаемых материалов элементов преобразователя.
Повышение стабильности акустического контакта с выпуклой или вогнутой поверхностью контролируемого объекта достигается нормальной ориентацией чувствительных элементов к поверхности контролируемого объекта.
Упрощение конструкции и технологии изготовления обеспечивается применением правильных пространственных форм матрицы, позволяющих применить технологичные методы изготовления.
Упрощение конструкции и технологии крепления ультразвукового пьезоэлектрического приемного преобразователя к контролируемому объекту достигается равномерным распределением усилия поджатия на три опоры (в общем случае центр тяжести нижнего основания пятигранника и соответственно ось симметрии крепежного устройства могут быть смещены относительно оси симметрии матрицы, а в случае правильных геометрических форм оси симметрии крепежного устройства и матрицы совпадают).
Упрощение технологии изготовления достигается применением технологичных методов изготовления, обеспечивающих требуемые акустические свойства материала матрицы, в том числе акустическую развязку элементов преобразователя. При испарении компонентов материала (или одного компонента, например, при использовании клея, содержащего в качестве растворителя ацетон) в процессе его отвердевания в технологической форме возникают поры (пустоты или отверстия), способствующие акустической развязке элементов.
На чертеже изображен вариант выполнения ультразвукового пьезоэлектрического приемного преобразователя,
где показано: 1 - корпус; 2 - чувствительный элемент; 3 - опора; 4 - цилиндрическая часть опоры; 5 - сужающаяся часть опоры; 6 - контактная точка; 7 - пьезоэлемент; 8 - матрица; 9 - пятигранник; 10 - контролируемый объект; 11 - крепежное устройство; 12 - подвижный элемент; 13 - пружина; 14 - проводники; 15 - кабель; 16 - поры или пустоты; 17 - газовая или жидкая среда; L - длина любой стороны нижнего основания пятигранника; Н - высота выступа опор; h - высота профиля контролируемого объекта между контактными точками преобразователя; О - ось симметрии третьего порядка матрицы.
Ультразвуковой пьезоэлектрический приемный преобразователь содержит размещенные в корпусе 1 три чувствительных элемента 2, которые закреплены в матрице 8 в трех отверстиях. Чувствительный элемент 2 состоит из опоры 3, на цилиндрической части 4 которой установлен пьезоэлемент 7. Сужающаяся часть опоры 5 обращена в сторону контролируемого объекта 10 и выступает за нижнюю поверхность матрицы 8. Преобразователь устанавливается на контролируемый объект 10 на трех контактных точках 6, причем высота выступа опор Н больше высоты профиля h. Оси чувствительных элементов 2 образуют боковые ребра пятигранника 9, нижнее основание которого сформировано прямыми, проходящими через контактные точки 6 сужающихся частей опор 5. Длина стороны нижнего (треугольного) основания пятигранника 9, обращенного к контролируемому объекту 10, удовлетворяет неравенству
В центре пятигранника 9 размещено крепежное устройство 11, состоящее из подвижного элемента 12, установленного с возможностью соединения с контролируемым объектом 10, и пружины 13. Ось симметрии крепежного устройства 11 перпендикулярна нижнему основанию пятигранника 9 и пересекает его центр тяжести. В приведенном варианте ось симметрии крепежного устройства 11 совпадает с осью матрицы 8. Подвижный элемент 12 выполнен в виде цилиндра из магнитного материала. При установке на стальной контролируемый объект 10 подвижный элемент 12 смещается за нижнюю поверхность матрицы 8 на величину зазора (H-h), что обеспечивает при контроле определенное усилие поджатия за счет деформации пружины 13. Матрица 8 выполнена в виде диска с тремя отверстиями, обладающего симметрией вращения третьего порядка. Характеристический импеданс материала матрицы 8 существенно меньше характеристического импеданса материала опор 3. Минимальная толщина стенки матрицы 8 между опорами 3 и корпусом 1 выбрана больше половины максимальной длины поперечной волны в материале матрицы. Электрические сигналы с пьезоэлементов 7 снимаются с помощью проводников 14 и далее по трехжильному кабелю 15 передаются на вход усилительно-преобразовательной аппаратуры.
На приведенном примере показан вариант изготовления матрицы 8 из клея, содержащего растворитель, который испарился при отвердевании клея в технологической форме, в которой заранее были установлены чувствительные элементы 2. При испарении растворителя образовались поры и пустоты 16, способствующие акустической развязке элементов преобразователя.
Внутри контролируемого объекта 10 находится газовая или жидкая среда 17, в которой существуют неинформативные динамические явления, вызывающие переносимый объемными волнами повышенный механический шум.
Преобразователь работает следующим образом. Он устанавливается на три контактные точки 6 на любой нелинейной поверхности. При возникновении и развитии дефекта контролируемого оборудования 10 (например, течи через трещину) в оболочке (в слое металла) распространяются волны Лэмба, несущие полезную информацию. Опоры 3 проводят ультразвуковые волны к пьезоэлементу 7, вызывающие его деформацию и соответственно появление электрического сигнала. Электрический сигнал по кабелю 15 передается на усилительно-преобразовательную аппаратуру, позволяющую известными методами обрабатывать сигнал с трех чувствительных элементов 2 с целью выявления дефектов (выделение определенной моды колебаний контролируемого объекта, определение координат источника волн Лэмба или направления их распространения и т.д.).
Конструкция и технология изготовления такого преобразователя проста. Преимущества измерений с помощью такого преобразователя по сравнению с простым акустическим детектированием посредством трех однокомпонентных преобразователей, установленных в трех разнесенных точках на контролируемом объекте, заключаются, в первую очередь, более высокой избирательностью волн Лэмба среди механического шума оборудования и лучшей корреляцией с важными параметрами акустических сигналов, что способствует повышению информативности измерений. Конструкция преобразователя обеспечивает удобную установку и монтаж на любой нелинейной поверхности.
Источники информации
1. Авторское свидетельство СССР 1436058, М. кл. G 01 N 29/04, опубл. в БИ 41, 1988 г.
2. Патент ГДР N 248429, М. кл. G 01 Н 11/08, 1987 г.
Изобретение относится к неразрушающему контролю промышленных объектов и может быть использовано для контроля трубопроводов и объектов с нелинейной поверхностью. Повышение информативности измерений при контроле объектов достигается за счет того, что ультразвуковой пьезоэлектрический приемный преобразователь содержит в корпусе чувствительный элемент, состоящий из опоры, часть которой выполнена в виде цилиндра с установленным на нем пьезоэлементом, а другая часть опоры выполнена суживающейся в сторону контролируемого объекта и выступающей за пределы корпуса. Введены два чувствительных элемента и акустически развязывающая матрица с тремя отверстиями, в которых жестко закреплены чувствительные элементы, при этом их оси симметрии совпадают с боковыми ребрами пятигранника, нижнее основание которого обращено к контролируемому объекту и образовано прямыми, проходящими через контактные точки сужающихся частей опор. Внутри пятигранника размещено крепежное устройство, а длина любой стороны нижнего основания пятигранника выбирается из определенного условия. Пятигранник является усеченной пирамидой, меньшее или большее основание которой обращено в сторону контролируемого объекта. Матрица выполнена в виде тела, обладающего симметрией вращения третьего порядка. Крепежное устройство выполнено в виде подпружиненного элемента, установленного с возможностью соединения с контролируемым объектом, причем ось симметрии крепежного устройства перпендикулярна нижнему основанию пятигранника и пересекает его центр тяжести. Матрица выполнена из жидкого материала, преимущественно содержащего испаряющиеся при отвердевании компоненты и принимающего геометрическую форму и пористость в технологической форме. 5 з.п.ф-лы, 1 ил.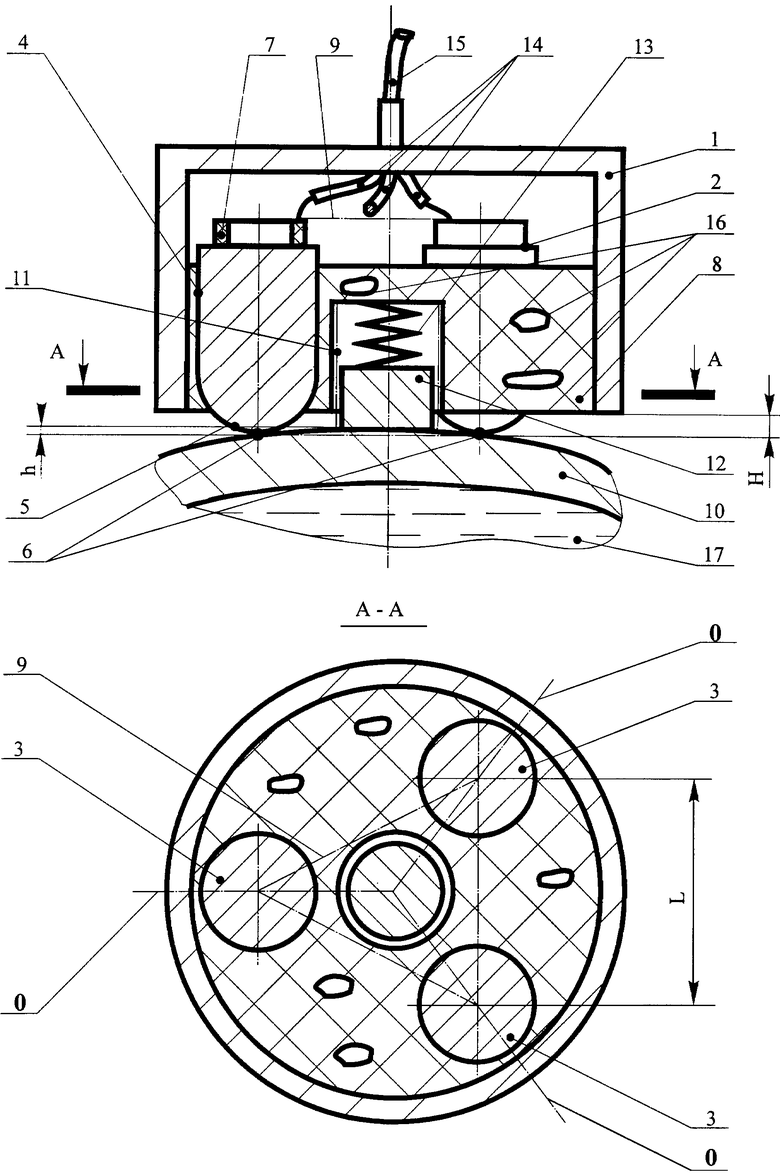

где са - скорость волны Лэмба или Рэлея в контролируемом объекте;
f1 - нижняя граничная частота полосы пропускания;
L - длина любой стороны основания пятиугольника;
5≤К≤20 - эмпирический коэффициент;
f2 - верхняя граничная частота полосы пропускания.
| УНИВЕРСАЛЬНЫЙ АВТОМАТИЧЕСКИЙ БЛОКИРУЮЩИЙ МЕХАНИЗМ ВЫКЛЮЧЕНИЯ ТОКАРНО-РЕВОЛЬВЕРНЫХСТАНКОВ | 0 |
|
SU248429A1 |
| Контактный наконечник пьезопреобразователя | 1986 |
|
SU1436058A1 |
| Сканирующий электромагнитно-акустический преобразователь | 1984 |
|
SU1180787A1 |
| Искатель импедансного дефектоскопа | 1978 |
|
SU712755A1 |
