Изобретение относится к силовым системам управления летательных аппаратов и наиболее целесообразно может быть использовано для контроля (проверки) качества функционирования рулевых приводов и автопилотов малогабаритных управляемых снарядов.
Рулевые приводы и автопилоты управляемых снарядов относятся к объектам с изменяющимися параметрами. В широких пределах по времени полета снаряда изменяются шарнирная нагрузка на рулях (от пружинной до перекомпенсации) из-за изменения скорости полета снаряда, а также параметры сигнала управления.
Современная технология создания новых комплексов управляемых снарядов предполагает широкое применение ввиду их особой эффективности воздушно-динамических рулевых приводов (ВДРП) и автопилотов, использующих в качестве источника рабочего тела энергию сжатого воздуха за счет скоростного напора набегающего потока сжатого воздуха при полете снаряда. Для них характерна существенная зависимость качества отработки сигнала управления от аэродинамической нагрузки и давления питания на различных участках полета снаряда.
Разработка простых, надежных и информативных способов и средств контроля качества функционирования рулевых приводов и автопилотов управляемых снарядов на различных этапах их разработки, производства и испытаний была и остается актуальной технической задачей.
Известен способ проверки качества функционирования (прототип) рулевого привода и автопилотного блока управляемого снаряда 30Ф39 [1. л.11, 20-25, 28-50] . Рули снаряда работают в трехпозиционном релейном импульсном режиме [1, л.22]. Лазерная полуактивная головка самонаведения снаряда выдает на рулевой привод снаряда управляющий сигнал в виде серии импульсов напряжения фиксированной амплитуды, длительностью, пропорциональной смещению пятна рассеяния относительно центра площадок фотоприемного устройства [1, л.24]. Максимальная длительность импульсов составляет 40 мс.
Проверка качества функционирования рулевого привода и автопилотного блока снаряд 30Ф39 проводится по времени эквивалентного запаздывания привода [2, требование л.5, п.1.2.2, методика проверки л.26-27, п.3.2.10 для рулевого привода и 3, требование л.24, п.12, методика проверки л.40-41, п.3.3.13 для автопилотного блока].
При проверке в соответствии с существующей методикой на входы управления +У, -У, +Z, -Z с выхода генератора Г5-56 поочередно подаются [3, л.41, п.9)] сигналы прямоугольной формы частотой 10 Гц, амплитудой 10 В, скважностью 2, амплитуда сигнала соответствует максимальному углу поворота рулей [δm = ±5°см. 1, л. 22] . По показаниям частотомера Ч3-54 определяют время эквивалентного запаздывания рулевого привода (автопилотного блока) при его срабатывании и отпускании. Время запаздывания отсчитывается от момента подачи импульса управления до момента прихода рулей на угол, равный половине максимального (1/2δm) время отпускания - от максимального угла δm до угла δ = 1/2δm. Моменты срабатывания и отпускания фиксируются выходом импульсного датчика отклонения рулей (ДOР), настроенного на половинный угол.
Недостатком известного метода проверки качества функционирования рулевого привода и автопилотного блока по времени эквивалентного запаздывания при отработке импульсных сигналов управления на половинный угол является малая информативность о состоянии контролируемого объекта, заключающаяся в следующем:
1. Проверка проводится без шарнирной нагрузки на рулях при широком допуске по времени эквивалетного запаздывания τэ = (3,5-10,0)•10-3 с [3, л.9, п. 1.2.6] при практически постоянной величине давления питания Р=(60±5) кгс/см2 [3, л.41, п.8)] без информации о текущем и максимальном углах поворота рулей на углах свыше 1/2δm, тогда как реально при работе в составе управляемого снаряда рули могут не доходить вообще до упора, могут сниматься с упора и отходить значительно от него. Так или иначе отсутствие информации о текущем угле поворота рулей в конечном счете это потеря перегрузки управления на снаряде, о которой при проверке неизвестно.
2. Не контролируется величина перерегулирования рулей относительно нейтрального (нулевого) положения в динамике при отработке заднего фронта импульса управления при возврате рулей с текущего максимального угла отработки в нулевое, хотя реально эта величина перерегулирования может достигать значительных величин, что будет снижать реальную перегрузку управления, так как величина перерегулирования по углу имеет противоположный знак. Физический смысл перерегулирования объясняется переходным процессом в механической системе приведенная масса движущихся частей - поршень 3 силовых цилиндров рулевой машины [1, рис.7.11, поз.3] - механическая пружина 30 [1, рис. 7.11] - рули двухканального трехпозиционного привода [1, рис. 7.10], выполненного по коромысловой схеме, при возврате рулей в нейтральное полодение при снятии сигнала управления [1, л.40, 2-й абзац сверху]. Существующий импульсный датчик угла отклонения рулей не позволяет проводить контроль величины перерегулирования, так как не контролируется текущее положение угла отработки.
3. Нет контроля ухода нулевого положения рулей при отcуствтии сигналов управления опять же по причине отсутствия контроля текущего значения угла поворота рулей, хотя в общем случае, например при действии значительной нагрузки перекомпенсации, уход нулевого положения рулей может быть ощутимой величиной по сравнению с максимальным углом поворота рулей (δm), что будет уменьшать линейную зону по перегрузке управления.
Задачей предлагаемого изобретения является повышение информативности и надежности контроля качества функционирования рулевых приводов и автопилотов управляемых снарядов при отработке импульсных сигналов управления.
Поставленная задача решается за счет того, что в способе проверки качества функционирования рулевых приводов и автопилотов управляемых снарядов, основанном на замере времени эквивалентного запаздывания рулевого привода или автопилота при подаче на входы каждого канала управления этого привода или автопилота сигналов прямоугольной формы, проверку проводят при давлении питания, соответствующем выбранному режиму полета снаряда, и съеме информации о текущем угле поворота рулей с выхода позиционного датчика угла поворота рулей, при этом на оба входа каждого канала управления привода или автопилота подают импульсные сигналы управления, причем частоту сигнала выбирают достаточно высокой, при обеспечении срабатывания рулей с упора на упор, фазовый сдвиг импульсных сигналов управления на втором входе по сравнению с первым обеспечивают 180o, для чего указанные сигналы прямоугольной формы с амплитудой, соответствующей максимальным, до упоров, углам поворота рулей в статике в одну (на угол +δm) и другую (на угол -δm) сторону, с выхода генератора указанных сигналов прямоугольной формы преобразуют для каждого из каналов управления рулевого привода или автопилота в две периодические последовательности импульсных сигналов той же амплитуды одного знака, импульсные сигналы каждой из последовательностей подают на соответствующие управляющие входы канала управления работающего рулевого привода или автопилота и одновременно на запускающий вход счетного устройства, по сигналу поворота рулей с упора на упор с выхода позиционного датчика угла поворота рулей формируют выходные импульсные сигналы, передний фронт одного из которых соответствует моменту прихода рулей на один упор (угол +δm), другого - на второй упор (угол -δm), выходные импульсные сигналы подают на останавливающие входы счетного устройства для измерения пауз между импульсами, производят отсчет времен срабатывания tcp1 и tср2, соответствующих интервалам времени от момента подачи импульса сигнала управления до момента прихода рулей на максимальные углы +δm и -δm, при отсутствии сигналов управления на входах рулевого привода или автопилота в установившемся состоянии определяют амплитуду автоколебаний и уход нулевого положения рулей с выхода датчика угла поворота рулей, полученные значения измеряемых параметров сравнивают с заданными на выбранном режиме полета снаряда и принимают решение о качестве функционирования рулевого привода или автопилота.
При проверке качества функционирования рулевых приводов и автопилотов в предлагаемом способе проверки рули при наличии на входах сигнала управления работают в двухпозиционном режиме, перемещаясь с одного упора на другой. При отсутствии сигнала управления рули находятся в нулевом положении.
Способ реализуется устройством, принципиальная схема которого приведена на фиг.1, 2, для проверки качества функционирования рулевых приводов и автопилотов, например, воздушно-динамических, работающих от набегающего воздушного потока управляемых снарядов при импульсных сигналах управления. Устройство содержит генератор 3 периодических сигналов прямоугольной формы, электронный частотомер 4, формирователи 5 запускающих и останавливающих импульсов счетчика электронного частотомера 4, пульт 6 управления и контроля, источники электро- 1, 2 и пневмопитания 7, основание 8 с закрепленным на нем проверяемым блоком воздушно-динамического рулевого привода или автопилота 9 с раскрытыми воздухозаборниками 10 и рулями 11, систему пневмопитания в составе пневморегулятора 12 параметров потока сжатого воздуха, ресивера 13 с измерительным манометром 14 и предохранительным клапаном сброса 15, коллектора-пневмораспределятеля 16 потока сжатого воздуха, пневмоподводов 17 к воздухозаборникам 10 и соединительных пневмошлангов 18. В устройстве пневмоподвод 17 к каждому из воздухозаборников 10 выполнен в виде съемного проходного наконечника 19 с двумя окнами, входное из которых представляет штуцер 20 цилиндрического типа и соединено пневмошлангом 18 с коллктором-пневмораспределителем 16, выходное окно по форме и площади соответствует приемному окну воздухозаборника 10 и соединено встык с воздухозаборником 10 с герметизацией по месту стыка через уплотнительный элемент 21 по периметру окна, причем уплотнительный элемент 21 со стороны воздухозаборника 10 выполнен с тонкостенным направляющим воротничком, внешние размеры которого соответствуют внутренним размерам окна воздухозаборника, а наконечник 19 снабжен откидным пружинным фиксирующим устройством, прижим выходной лапки которого обеспечивается пружиной 22 к нижней поверхности воздухозаборника 10 со стороны, противоположной входному окну воздухозаборника.
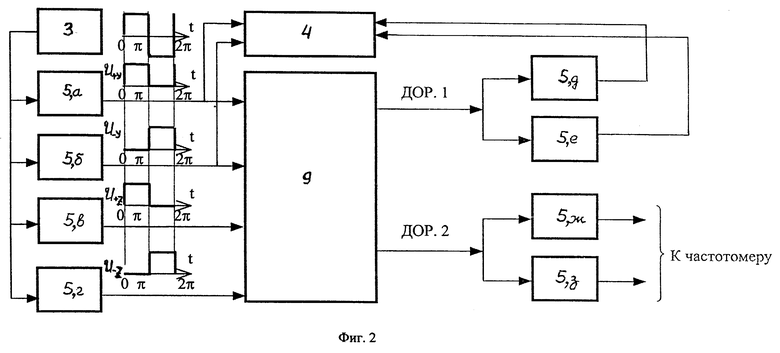
На фиг.2 3 - генератор периодичских сигналов прямоугольной формы, 5 (а, б, в, г) - формирователи запускающих импульсов счетчика электронного частотомера, 9 - проверяемый блок рулевого привода или автопилота, 4 - электронный частотомер, ДОР1, ДОР2 - выходные напряжения позиционных датчиков углов отклонения рулей соответственно для вертикального и горизонтального каналов управления привода и автопилота, 5 (д, е, ж, з) - формирователи останавливающих импульсов счетчика частотомера (5д, 5е соответствуют углу +δm, 5ж, 5з - углу -δm), U+z, U-z, U+y, U-y - импульсные сигналы управления (U+y, U-y для вертикального канала управления, U+z, U-z - для горизонтального).
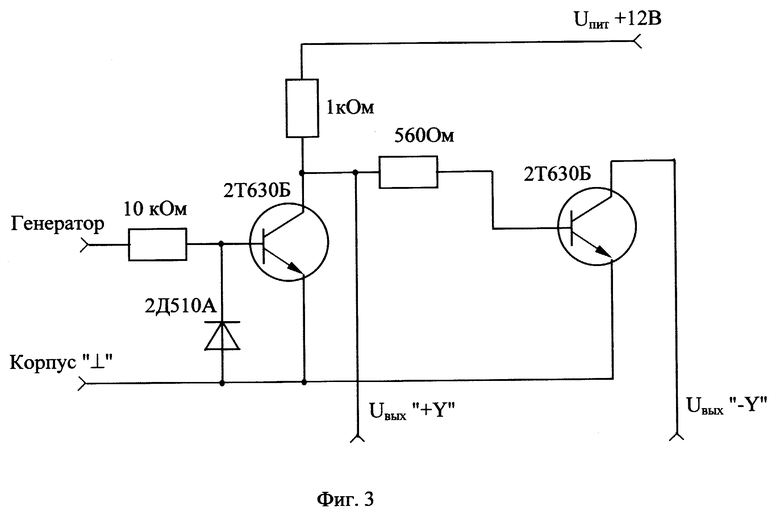
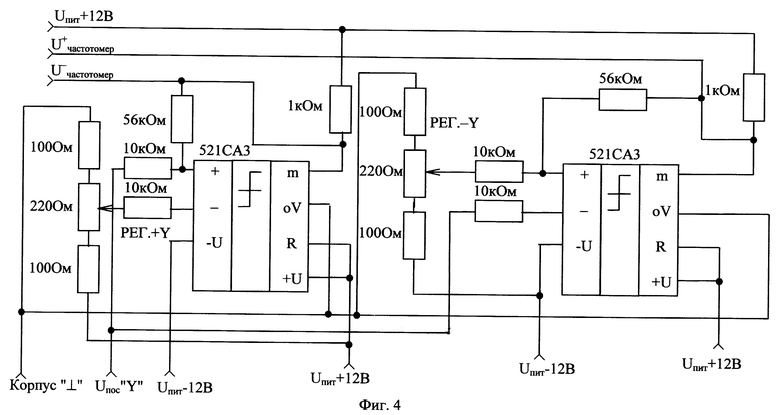
Формирователи запускающих импульсов, принципиальная электрическая схема которых приведена на фиг. 3, для каждого из каналов управления выполнены в виде двухполупериодного выпрямителя, вход которого соединен с выходом генератора периодических сигналов прямоугольной формы, положительная ветвь выпрямителя через первое триггерное устройство связана с первым управляющим входом канала управления рулевого привода и автопилота, отрицательная ветвь через второе триггерное устройство и инвертор подключена ко второму входу управления привода и автопилота. Каждый из формирователей останавливающих импульсов (фиг. 4) выполнен в виде триггерного устройства с регулируемой на входе опорой по напряжению с диапазоном регулировки, соответствующим максимальному углу поворота рулей ±δm (по упорам) проверяемого рулевого привода или автопилота, выход первого формирователя по углу (+δm) и выход второго (-δm) через инвертор подключены к соответствующим останавливающим входам счетчика электронного частотомера, при этом каждый формирователь останавливающих импульсов подключен своим входом к соответствующему выходу позиционного датчика угла поворота рулей. Электрические схемы формирователей выполнены на обычных доступных электроэлементах.
Устройство фиг.1 работает следующим образом. Проверяемый блок 9 рулевого привода или автопилота с раскрытыми воздухозаборниками 10 и рулями 11 устанавливается и крепится на основании 8 (элементы крепления ввиду их непринципиальности на фиг.1 не показаны). От источника 7 сжатого воздуха, например сети высокого давления, через систему пневмопитания, содержащую пнеаморегулятор 12 параметров потока сжатого воздуха, ресивер 13 с измерительным манометром 14 и предохранительным клапаном сброса 15, коллектор -пневмораспределитель 16 потока сжатого воздуха, пневмошланги 18 и пневмоподводы 17, сжатый воздух поступает на входы воздухозаборников 10 и далее в блок 9. Величина рабочего давления выставляется и контролируется по показаниям манометра 14.
К проверяемому блоку 9 подключается пульт управления и контроля 6 и формирователи 5 запускающих и останавливающих импульсов счетчика частотомера, которые электрически связаны с выходом генератора 3 периодических сигналов прямоугольной формы и с запускающим и останавливающим входами счетчика электронного частотомера 4. Электропитание осуществляется от источников электропитания 1 (сеть переменною тока 220 В, 50 Гц) и 2 (источники постоянного тока ±12 В).
Проверку проводят при отсутствии момента шарнирной нагрузки на рулях при одновременной подаче импульсных сигналов управления U+у, U-y, U+z, U-z (фиг. 2) на оба входа каждого канала управления привода и автопилота с выходов формирователей запускающих импульсов. При этом сигналы управления на втором входе -У, -Z сдвигают по фазе на 180o по сравнению с сигналами +Y, +Z на первом входе. При проверках в этом варианте рули работают в двухпозиционном режиме, перемещаясь с одного упора на другой. Частоту сигнала выбирают достаточно высокой, но такой, при которой обеспечивается четкое срабатывание рулей привода и автопилота с упора на упор. Необходимые для управления с упора на упор импульсные сигналы управления создают за счет преобразования периодического сигнала прямоугольной формы с выхода генератора сигналов 3 (фиг.2).
Определение времени срабатывания привода и автопилота 9 при приходе рулей на один и другой упоры (фиг. 2) проводят с помощью электронного частотомера 4, например, типа ЧЗ-54, для чего на запускающий вход подают импульс управления, а на останавливающий вход - выходной импульс, соответствующий моменту прихода рулей на упор +δm или -δm, который получают за счет преобразования сигналов с выходов позиционных датчиков угла поворота (отклонения) рулей ДОР1, ДОР2 формирователями останавливающих импульсов.
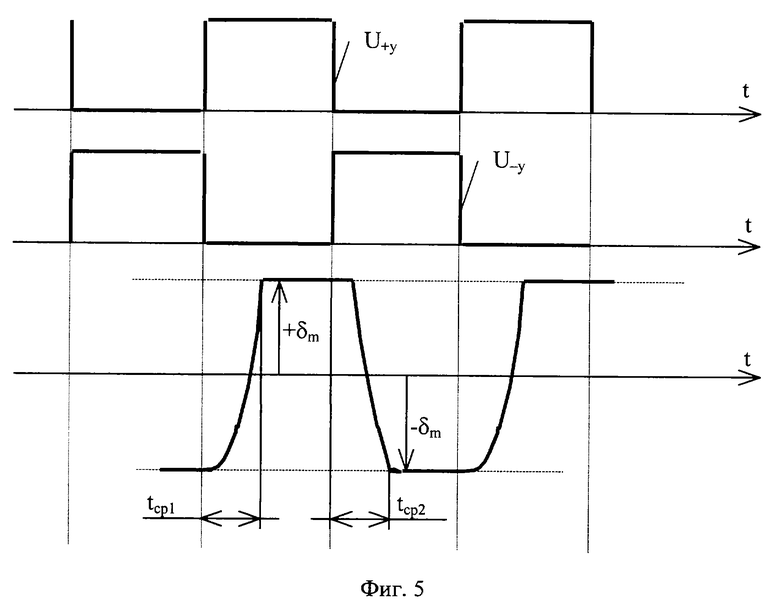
На фиг. 5 для одного из каналов управления рулевого привода и автогопилота приведены импульсные сигналы U+y и U-y по обоим входам одного из каналов управления и cоответствующий выходной сигнал на выходе позиционного датчика угла поворота рулей, где
tcp1, tcp2 - время срабатывания,
+δm, -δm - максимальные углы поворота рулей в одну (упор +δm) и другую (упор -δm) стороны.
Амплитуду автоколебаний и уход нулевого положения рулей определяют при отсутствии сигналов управления U+у, U-y, U+z, U-z на входах рулевого привода и автопилота с помощью универсального вольтметра типа ВУ-16 (ВУ-16А) с использованием соответственно переменного и постоянного входов вольтметра, подключаемых к выходу позиционного датчика угла поворота рулей. Деля полученные соответствующие значения напряжений U~ и U= на коэффициент передачи датчика угла поворота рулей, получаем значения амплитуды автоколебаний и ухода нулевого положения рулей проверяемого блока.
Предлагаемый способ проверки качества функционирования рулевых приводов и автопилотов позволяет проводить проверку качества их функционирования. Требования по временам срабатывания tcp1, tср2 при работе рулей с упора на упор в двухпозиционном режиме вырабатываются разработчиком при проведении математического моделирования, экспериментальной отработки и испытаний рулевых приводов и автопилотов, работающих в трехпозиционном режиме.
Предлагаемый способ проверки с устройством для его осуществления, с одной стороны, прост в реализации и обладает малой трудоемкостью, поскольку не требуется применять нагружающие устройства для рулей, а также проводить запись на осциллограмму и обработку входных и выходных сигналов. С другой стороны, этот способ обладает по сравнению с известным большей информативностью и надежностью в контроле качества функционирования, так как он позволяет проводить оценку работы приводов и автопилотов на полном угле отработки рулей, проводить контроль амплитуды автоколебаний, а следовательно, контроль перерегулирования привода и автопилота при работе в трехпозиционном режиме при перемещении рулей с упора в нулевое положение, поскольку перерегулирование привода и автопилота, определяемое как величина амплитуды первой полуволны отклонения рулей от нулевого положения, при наличии автоколебаний будет равно или меньше амплитуды автоколебаний рулей, а также проводить контроль ухода нулевого положения рулей.
Простота, малая трудоемкость и высокая информативность и надежность предлагаемого способа контроля особенно важны и привлекательны, например, на этапе серийного производства продукции.
Таким образом, предлагаемый способ проверки качества функционирования рулевых приводов и автопилотов управляемых снарядов и устройство для его осуществления с достаточной для практики степенью точности, информативности, надежности и трудоемкости с помощью простых и надежных технических средств позволяет проводить оценку качества продукции на различных этапах изготовления и испытаний рулевых приводов и автопилотов малогабаритных управляемых снарядов и особенно, что очень важно, например, на этапе серийного производства продукции.
Источники информации
1. 152-мм выстрел 3ВОФ64(3ВОФ93) с оcколочно-фугасным управляемым снарядом 3ОФ39 и зарядом 1 (уменьшенным переменным зарядом). Техническое описание и инструкция по эксплуатации 3ВОФ64.00.00.000 ТО (3ВОФ93.00.00.000 ТО). М.: Военное издательство, 1990 г.
2. Способ (методика) проверки времени эквивалентного запаздывания привода. Привод. Технические условия 9Б838.02.00.000 ТУ. КБЦ, Тула, 1985 г.
3. Способ (методика) проверки времени эквивалентного запаздывания автопилотного блока. Блок автопилотный. Технические условия 9Б838.00.00.000 ТУ, КБЦ Тула, 1985 г.
Изобретение относится к испытаниям силовых систем летательных аппаратов, преимущественно малогабаритных управляемых снарядов. Предлагаемый способ основан на замере времени запаздывания рулевого привода или автопилота при подаче на входы их каналов управления сигналов прямоугольной формы. При этом снимают информацию о текущем угле поворота рулей. Частоту и амплитуду сигналов выбирают достаточно высокой для срабатывания рулей с упора на упор. Сигналы с выхода генератора преобразуют в две периодические последовательности, подаваемые на входы канала управления работающего рулевого привода или автопилота и на вход счетного устройства. По сигналу поворота рулей формируют выходные импульсные сигналы, передние фронты которых соответствуют моментам прихода рулей на один и другой упоры. При этом счетное устройство измеряет паузы между импульсами. При отсутствии сигналов управления на входах, в установившемся режиме определяют амплитуду автоколебаний и уход нулевого положения рулей с выхода датчика их поворота. Сравнивая измеренные параметры с заданными, судят о качестве функционирования рулевого привода или автопилота. Реализующее способ устройство имеет генератор прямоугольных импульсных сигналов, частотомер, формирователи запускающих и останавливающих импульсов счетчика частотомера для каждого из двух каналов управления рулевого привода и автопилота, пульт управления, источники электро- и пневмопитания и другие необходимые элементы. Изобретение обеспечивает повышение информативности и надежности проводимого контроля в режиме подачи импульсных сигналов управления. 2 с.п.ф-лы, 5 ил.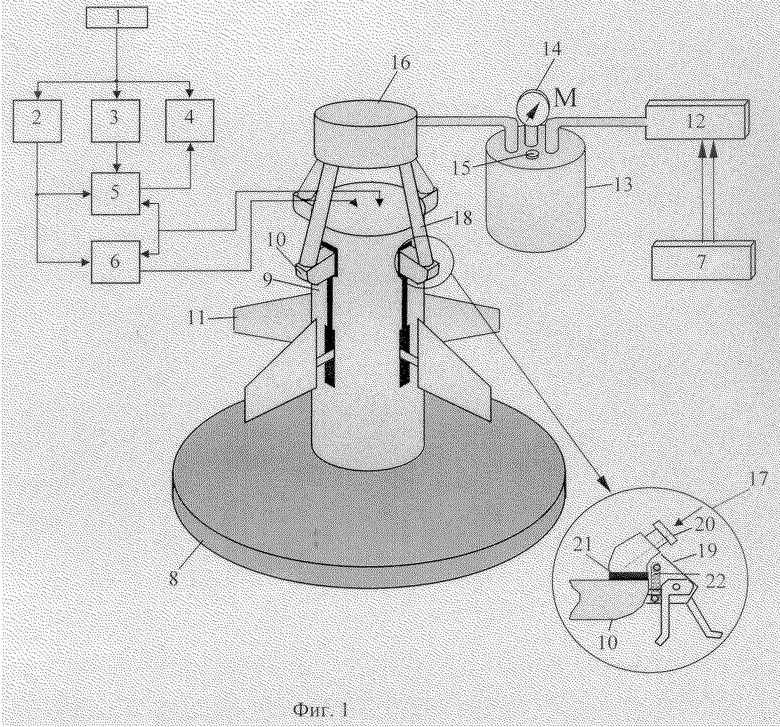
| Способ образования азокрасителей на волокнах | 1918 |
|
SU152A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| - М.: Воениздат, 1990 | |||
| Способ (методика) проверки времени эквивалентного запаздывания привода | |||
| Привод | |||
| Техн | |||
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Способ (методика) проверки времени эквивалентного запаздывания автопилотного блока | |||
| Блок автопилотный | |||
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| US 5590850 А, 07.01.1997. | |||

