Изобретение относится к силовым системам управления летательных аппаратов и наиболее целесообразно может быть использовано в рулевых приводах и автопилотах малогабаритных управляемых снарядов.
Известны способ управления и устройство для его реализации (аналог) электропнематическим рулевым приводом и автопилотом летательных аппаратов [1] . Рулевой электропневматический привод [1] представляет собой замкнутую автоматическую систему, в которой измеряют угол поворота рулей с помощью датчика обратной связи, сравнивают измеренное значение с заданным и формируют сигнал управления на привод в соответствии с ошибкой управления (рассогласования). Устройством, обеспечивающим усиление сигнала ошибки, является электронный (полупроводниковый) усилитель.
Известна релейная система автоматического регулирования [2]. Релейная система управления содержит суммирующее устройство, релейный элемент и объект управления (линейная часть), охваченные отрицательной обратной связью. Недостатком известной релейной системы автоматического регулирования является низкая точность отработки сигнала управления.
Известен автоколебательный рулевой привод управляемого снаряда 9M117 [3] . Он содержит последовательно соединенные суммирующее устройство, корректирующий фильтр, нелинейный элемент, выполненный в виде триггерного устройства, усилитель мощности, рулевую машину с управляющим магнитом, датчик обратной связи, связанный с одним из входов суммирующего устройства, другой вход которого является входом привода.
Недостатком известного автоколебательного рулевого привода является недостаточно высокая точность работы при больших амплитудах автоколебаний.
В известном автоколебательном автопилоте управляемого снаряда [4], содержащем источник питания и последовательно соединенные блок вычитания, нелинейный элемент, усилитель мощности, рулевую машину с управляющим магнитом, датчик обратной связи, описан и реализован также способ управления по ошибке рассогласования, как и в рулевом приводе [1]. В нем для повышения точности нелинейный элемент выполнен в виде последовательно соединенных суммирующего элемента, линейного усилителя-ограничителя и дифференцирующего звена, подключенного выходом ко второму входу суммирующего элемента, причем вход суммирующего элемента соединен с выходом блока вычитания, а выход линейного усилителя-ограничителя соединен со входом усилителя мощности.
Недостатком известного технического решения [4], являющегося наиболее близким аналогом (прототипом) предлагаемого изобретения, является низкая точность отработки сигналов управления в автопилотах управляемых снарядов, низкая точность удержания нулевого положения рулей автопилота при отсутствии сигналов управления при действии на рулях нагрузки перекомпенсации в случае аэродинамически перекомпенсированного руля [1, стр. 146, 154], что практически широко имеет место [1, стр. 24-25]. Это связано с тем, что при выборе положения оси вращения руля в середине диапазона возможных перемещений центра давления частичная перекомпенсация руля действительно выгодна для управляемого снаряда, так как она позволяет существенно уменьшить момент нагрузки на рулевой привод, а следовательно, уменьшить мощность привода и тем самым снизить его массогабаритные показатели.
Низкая точность отработки сигналов управления, низкая статическая точность удержания нулевого положения рулей автоколебательного рулевого привода [3] и автопилота [4] при отсутствии сигналов управления объясняются наличием сравнительно большой амплитуды автоколебаний (7-15o) из-за низкой частоты автоколебаний (40-70 Гц).
Большая амплитуда автоколебаний рулей приводит к значительному увеличению лобового сопротивления снаряда и снижению его скорости полета, что является также существенным недостатком автоколебательных рулевых приводов и автопилотов управляемых снарядов. Для исключения этого недостатка необходимо увеличивать мощность двигательной установки, что приводит к увеличению массы и габаритов снаряда.
Для обеспечения точности системы управления управляемого снаряда при отработке сигналов управления, а также статической точности удержания нулевого положения рулей автопилота при отсутствии сигналов управления, уменьшения лобового сопротивления снаряда необходимо иметь минимальную амплитуду автоколебаний рулей, не превосходящую значений, заданных техническими требованиями на снаряд и автопилот (например, не более 3o на частотах не ниже 60 Гц). Это с одной стороны. С другой стороны для обеспечения линеаризации трения и люфтов в механической системе поршень рулевой машины - рули, поршень - выход датчика обратной связи и повышения точности необходимо обеспечить достаточную для линеаризации этих нелинейностей минимальную амплитуду колебаний на выходе рулевого привода и автопилота.
Поскольку линейная часть автоколебательного рулевого привода [3] и автопилота [4] является фильтром низкой частоты, то небольшое значение амплитуды автоколебаний может быть обеспечено за счет повышения частоты автоколебаний, конечно, при отсутствии на этих частотах резонансных явлений, чего нельзя сказать в отношении силового пневмопривода электропневматического рулевого привода, в знаменателе передаточной функции которого имеется колебательное звено [1, стр. 127, 1-й абзац сверху] с малым коэффициентом демпфирования ξпп≪1.
В источнике информации [1] подробно рассмотрены структурная схема и передаточная функция силового пневмопривода [1, стр. 124-133] и частотные характеристики электропневматического рулевого привода [1, cтp. 138-151] как для случаев отсутствия, так и наличия знакопеременной шарнирной нагрузки. Построенные логарифмические амплитудно-частотные характеристики (ЛАХ) привода [1, стр. 139, 3-й абзац снизу, рис. 3.16] имеют характерный для электропневматических приводов вид: большой ярко выраженный резонансный всплеск на частоте
где Тпп - постоянная времени колебательного звена передаточной функции пневмопривода.
Следует отметить, что максимальный подъем амплитудной характеристики на частоте ωпп за счет коэффициента демпфирования ξпп составляет
Отсюда следует, что для малых значений коэффициента демпфирования ξпп≪1 (например, равных 0,05-0,10) этот подъем весьма значителен.
На величину ξпп оказывает сильное влияние трение, которое всегда присутствует в любом газовом приводе, так как сжатый воздух и любой иной газ, в отличие от жидкости, не обладают смазывающими свойствами [1, стр. 141, 3-й абзац снизу, стр. 127-128, стр. 144-145).
Реально в автоколебательном рулевом приводе [3] и автопилоте [4] управляемого снаряда частота автоколебаний находится вблизи слева от резонансного пика, определяемого частотой ωпп, т.е. в области подъема амплитудной характеристики колебательного звена привода. Поэтому на амплитуду автоколебаний в этой области очень сильное влияние оказывает коэффициент демпфирования ξпп привода, т.е. трение в приводе.
Нахождение частоты автоколебаний вблизи резонансного пика определяется следующими физическими соображениями. В источнике информации [5] рассмотрена релейная автоколебательная система управления для объектов с изменяющимися параметрами. Для структурной схемы автоколебательной системы [5, рис. 5.5] с характеристикой релейного элемента [5, рис. 5.6а)] условие для определения частоты автоколебаний [5, стр. 235, 1-й абзац сверху] имеет вид
ϕл(ωa) = -180°,
где ϕл - фазовая характеристика линейной части системы.
К такой же структурной схеме [5, рис.5] приводится и схема автоколебательного рулевого привода [3] автопилота [4] управляемого снаряда, линейная часть которых описывается передаточной функцией пневмопривода, подробно рассмотренного в источнике информации [1], и передаточной функцией релейного управляющего электромагнита, передаточная функция которого описывается звеном чистого запаздывания
W(p) = e-pτ,
где τ - время запаздывания.
Величина τ для приводов [3, 4] составляет порядка нескольких миллисекунд (τ=1,5-2,5 мсек).
Если взять для примера случай ненагруженного привода, то передаточная функция будет иметь тогда вид
где δ(p) и α(p) - соответственно угол пoворота рулей и регулирующего органа электромагнита, управляющего расходом газа, в операторной форме;
К - коэффициент передачи привода;
τ - время запаздывания электромагнита;
Тпп и ξпп - соответственно постоянная времени колебательного звена и демпфирование привода.
Проведя анализ баланса фаз для определения частоты автоколебаний [ϕл(ωa) = -180°], видно, что без учета звена запаздывания суммарный фазовый сдвиг -180o будет именно на резонансной частоте ωпп, определяемой постоянной времени Тпп привода, т.е.

На этой частоте ωпп фазовый сдвиг -180o будет определяться фазовым сдвигом интегрирующего звена (-90o) и фазовым сдвигом колебательного звена на собственной частоте (-90o). Частота автоколебаний ωa будет равна частоте ωпп, т.е. будет находиться на частоте резонанса.
С учетом звена запаздывания с постоянной времени τ фазовый сдвиг будет равен
ϕ = ωτ,
где ω = 2πf - круговая частота.
Учитывая малое значение τ, фазовый сдвиг на частотах, близких к частоте ωпп, будет составлять небольшую величину по сравнению с фазовым сдвигом -180o, т. е. реально частота автоколебаний будет находиться несколько ниже частоты ωпп, но в зоне подъема амплитудной характеристики со всеми вытекающими отрицательными последствиями для амплитуды автоколебаний в части ее увеличения.
При наличии знакопеременной шарнирной нагрузки характер рассуждений будет близок к рассмотренному, так как в этом случае в знаменателе передаточной функции будет звено (Тр+1) в случае пружинной нагрузки или звено (Тр-1) - в случае нагрузки перекомпенсации. Поскольку частоты ω, определяемые постоянной времени  будут значительно больше частоты ωпп при выборе максимального развиваемого момента привода, то в области частоты ωпп фазовый сдвиг от этих звеньев будет близким к -90o, т.е. выводы в части частоты автоколебаний будут близки к рассмотренному выше для случая отсутствия шарнирной нагрузки.
будут значительно больше частоты ωпп при выборе максимального развиваемого момента привода, то в области частоты ωпп фазовый сдвиг от этих звеньев будет близким к -90o, т.е. выводы в части частоты автоколебаний будут близки к рассмотренному выше для случая отсутствия шарнирной нагрузки.
Эти соображения подтверждаются анализом логарифмических частотных характеристик рулевого пневмопривода при различных шарнирных нагрузках [1, рис. 3.23, стр. 146-147]:
нулевой Кш=0
пружинной Кш>0
перекомпенсации Кш<0.
Соответствующие этим нагрузкам логарифмические фазовые частотные характеристики выделены [1, рис. 3.23] пунктирными линиями, соответствующие им логарифмические амплитудные частотные характеристики - сплошными линиями.
Из анализа фазовых частотных характеристик [1, рис. 3.23] видно, что точка пересечения фазовой характеристики с линией -180o при пружинной нагрузке (Кш>0) находится немного правее точки пересечения фазовой характеристики с линией -180o при нулевой нагрузке (Кш=0), а при нагрузке перекомпенсации (Кш<0) - несколько левее. Соответственно и частота автоколебаний в первом случае будет несколько выше по сравнению со случаем нулевой нагрузки (Кш=0) и несколько ниже - во втором случае.
Наличие в схеме привода [3] корректирующего фильтра интегродифференцирующего типа с передаточной функцией
где Т1, T2 - постоянные времени фильтра, причем для повышения добротности привода постоянная времени T2 выбирается больше постоянной времени Т1 (в 2-3 раза) таким образом, чтобы на частотах автоколебаний обеспечить уменьшение амплитуды автоколебаний на входе релейного элемента в 2-3 раза и тем самым повысить добротность и точность привода. Практически при соблюдении этих условий фазовый сдвиг фильтра на частотах автоколебаний будет составлять небольшую величину (несколько градусов) и не повлияет на выводы в части частоты автоколебаний нагруженного и ненагруженного привода.
Повышение частоты автоколебаний с целью уменьшения амплитуды автоколебаний может быть достигнуто за счет следующих мероприятий:
а) применения корректирующих устройств;
б) подавления низкочастотных автоколебаний внешними высокочастотными колебаниями;
в) охвата релейного элемента отрицательной обратной связью через апериодическое звено;
г) построения двух- или трехконтурных автоколебательных систем.
Применение корректирующего устройства не позволяет существенно увеличить частоту автоколебаний, недостатком второго мероприятия является необходимость применения дополнительного генератора линеаризирующих колебаний.
Недостатком известной релейной автоколебательной системы автоматического регулирования с отрицательной обратной связью вокруг релейного элемента [2, стр. 26, рис. XIII.9] является наличие запаздывания автоколебательного контура (релейного усилителя с обратной связью), определяемое величиной зоны неоднозначности релейного усилителя, и неизбежное в релейном усилителе временное запаздывание [2, стр. 48, 3-й абзац снизу].
Недостатком известной релейной системы с двухчастотным автоколебательным режимом [5, стр. 240, рис. 5.8, стр. 239] является сложность реализации схемы для осуществления двухчастотного автоколебательного режима [5, стр. 243 2-й абзац снизу].
Задачей предлагаемого изобретения является уменьшение амплитуды колебаний рулей электропневматического рулевого привода управляемого снаряда при действии знакопеременной шарнирной нагрузки на рулях, уменьшение лобового сопротивления снаряда без увеличения массы и габаритов двигательной установки, повышение точности отработки сигналов управления и точности удержания нулевого положения рулей при отсутствии сигналов управления без увеличения массы и габаритов аппаратуры управления, т.е. тем самым устранение недостатков известных способа и устройств управления по ошибке рассогласования электропневматическим рулевым приводом управляемого снаряда [1-5].
Это достигается за счет применения предлагаемого способа управления, суть которого заключается в следующем. На выходе релейного элемента формируют сигнал управления, для чего сигнал ошибки управления с выхода усилителя пропускают через последовательно соединенные усилитель-ограничитель и блок выделения модуля и подают на первый вход второго релейного элемента, на второй вход которого подают периодический сигнал треугольной формы фиксированной частоты с выхода генератора сигнала, выходной сигнал второго релейного элемента подают на вход генератора периодического сигнала треугольной формы управляемой частоты, частоту сигнала которого изменяют в соответствии с зависимостью
где f - частота сигнала;
f0 - начальная частота сигнала;
A - амплитуда сигнала;
|ΔU| - модуль сигнала ошибки управления.
Выходной сигнал генератора управляемой частоты подают на второй вход первого релейного элемента.
Начальную частоту сигнала генератора управляемой частоты устанавливают из условия обеспечения допустимой заданной амплитуды колебаний рулей при действии знакопеременной шарнирной нагрузки на привод, а амплитуду сигнала - из условия
A = KДОС•δm, (1)
где А - амплитуда периодического сигнала треугольной формы;
КДОС - коэффициент передачи датчика угла поворота рулей рулевого привода;
δm - максимальный заданный угол поворота рулей по упорам.
Частоту генератора сигнала фиксированной частоты устанавливают существенно выше начальной частоты генератора сигнала управляемой частоты из условия обеспечения минимальной допустимой амплитуды пульсаций сигнала генератора управляемой частоты, а амплитуду сигнала - равной выбранной из условия (1), уровень ограничения усилителя-ограничителя выбирают из обеспечения соотношения
Uогр=(0,8-0,85)•Um ДОС,
где Uогр - напряжение ограничения усилителя-ограничителя;
U
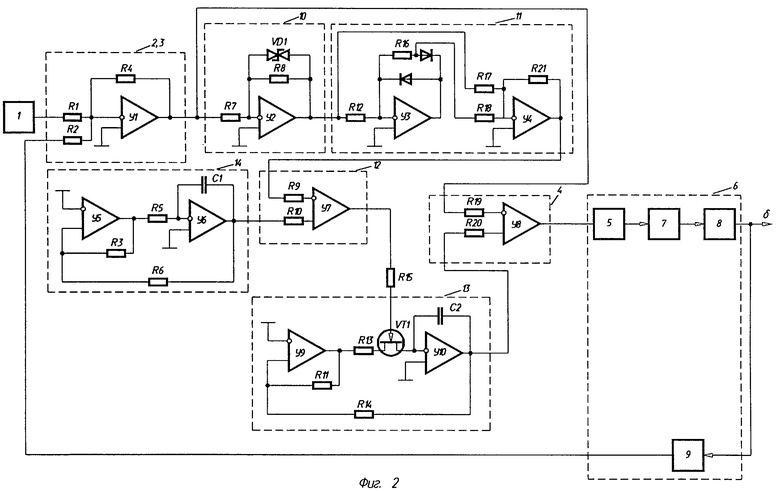
Способ реализуется устройством, включающим последовательно соединенные блок задания, блок вычитания, первый вход которого является входом задания привода, усилитель, релейный элемент, усилитель мощности и рулевую машину, выход которой является выходом привода и подключен через датчик угла поворота рулей ко второму входу блока вычитания, в которое введены генератор периодического сигнала треугольной формы управляемой частоты, генератор периодического сигнала треугольной формы фиксированной частоты и последовательно соединенные усилитель-ограничитель, блок выделения модуля и второй релейный элемент, выход генератора периодического сигнала треугольной формы управляемой частоты подключен ко второму входу первого релейного элемента, а вход - к выходу второго релейного элемента, выход генератора периодического сигнала треугольной формы фиксированной частоты соединен со вторым входом второго релейного элемента, вход усилителя-ограничителя подключен к выходу усилителя, а генератор периодического сигнала треугольной формы управляемой частоты выполнен в виде последовательно включенных первого операционного усилителя, инвертирующий вход которого подключен к общей шине, а выход через первый масштабный резистор - к неинвертирующему входу и второго операционного усилителя, выход которого подключен к первому выводу интегрирующего конденсатора, второй вывод которого соединен с инвертирующим входом, и к первому выводу второго масштабного резистора, второй вывод которого соединен с неинвертирующим входом первого операционного усилителя, выход которого через последовательно соединенные третий масштабный резистор и управляемый электронный ключ подключен к инвертирующему входу второго операционного усилителя, ключ выполнен на полевом транзисторе, сток которого является входом ключа, исток - выходом, а затвор - управляющим входом, подключенным через масштабный резистор к выходу второго релейного элемента.
Схема устройства, реализующего предлагаемый способ управления, приведена на фиг.1 и 2. Схема содержит блок задания 1, блок вычитания 2, усилитель 3, первый релейный элемент 4, усилитель мощности 5, рулевую машину 3 в составе управляющего электромагнита 7, исполнительного двигателя 8 и датчика угла поворота рулей 9, усилитель-ограничитель 10, блок выделения модуля 11, второй релейный элемент 12, генератор 13 периодического сигнала треугольной формы управляемой низкой частоты, генератор 14 периодического сигнала треугольной формы высокой фиксированной частоты. На схеме фиг.1 обозначено: Uy - сигнал управления, Uос - сигнал обратной связи, δ - угол поворота рулей.
Устройство работает следующим образом.
При отсутствии сигнала управления на выходе привода устанавливаются колебания, частота которых равна установленной начальной частоте генератора 13 периодического сигнала треугольной формы, а амплитуда колебаний определяется параметрами линейной части привода.
Частоту сигнала генератора 13 устанавливают несколько выше частоты ωпп резонансного пика колебательного звена рулевой машины 6 в области спада амплитудной характеристики с целью получения требуемой уменьшенной амплитуды колебаний рулей при знакопеременной шарнирной нагрузке. Так, например, для одного из приводов при частотах резонансного пика (ωпп = 2πfпп), равных 110 Гц при Кш= 0,140 Гц при Kш>0, 100 Гц при Кш<0, частоту генератора выбирают равной в диапазоне 150-200 Гц, а именно 200 Гц.
Верхнее значение этой частоты генератора ограничено физически двумя обстоятельствами: ограниченным быстродействием (временем срабатывания) управляющего электромагнита 7 рулевой машины 6 с одной стороны и необходимостью обеспечения на выходе привода минимальной амплитуды колебаний рулей, например 1-3o, достаточной для линеаризации трения и люфтов механической системы шток исполнительного двигателя 8 рулевой машины 6 - рули, шток исполнительного двигателя 8 - выход датчика угла поворота рулей 9 рулевой машины. Сигнал установленной частоты генератора 13 должен отрабатываться управляющим электромагнитом 7 с упора на упор без ограничения с некоторым запасом на отработку сигнала на его входе при изменении скважности при отработке сигнала управления Uу на входе привода.
Для обеспечения минимальной допустимой амплитуды пульсаций сигнала генератора 13 периодического сигнала треугольной формы амплитудой А частоту генератора 14 периодического сигнала треугольной формы амплитудой А устанавливают существенно выше на порядок и более начальной частоты генератора 13, например 100 кГц, для рассматриваемого привода.
Амплитуду А периодического сигнала треугольной формы на выходах генераторов 13 и 14 выбирают равной из условия
A = KДОС•δm,
где KДОС - коэффициент передачи датчика угла поворота рулей рулевого привода;
δm - максимальный заданный угол поворота рулей по упорам.
На выходе релейного элемента 12 будут наблюдаться прямоугольные колебания 50%-ной скважности частоты генератора 14, которые будут управлять работой электронного ключа генератора 13.
На выходе релейного элемента 4 при этом существуют прямоугольные колебания 50%-ной скважности установленной частоты генератора 13 (200 Гц для выбранного привода). Якорь управляющего электромагнита 7, поршень исполнительного пневмодвигателя 8 и связанные с ним рули колеблются с этой частотой 200 Гц около нулевого среднего значения. Учитывая, что линейная часть привода является фильтром низкой частоты, на выходе привода сигнал колебаний этой частоты имеет форму, близкую к синусоидальной, амплитудой около 1-3o в зависимости от шарнирной нагрузки (меньшее значение амплитуды для пружинной, большее - для нагрузки перекомпенсации).
Полученное значение амплитуды колебаний является достаточным для линеаризации трения и люфтов механической системы шток исполнительного двигателя - рули, шток - выход датчика угла поворота рулей и обеспечивает минимальное лобовое сопротивление управляемого снаряда в полете. Для сравнения для выбранного привода до введения предлагаемого технического решения амплитуда автоколебаний составляла 5o для случая Кш>0 и 15o для Кш<0 (при линейной зоне по углу отклонения рулей δm = ±25°), т.е. разница весьма существенная в части уменьшения амплитуды колебаний рулей при использовании предлагаемого технического решения.
При подаче сигнала управления Uy на вход привода с выхода блока задания 1 сигнал ошибки управления ΔU=Uy-Uoc после усиления усилителем 3 будет одновременно поступать на вход усилителя-ограничителя 10 и вход релейного элемента 4. После выделения модуля ошибки управления блоком выделения модуля 11 этот сигнал поступает на вход релейного элемента 12, на выходе которого скважность прямоугольных колебаний частоты генератора 14 будет отличаться от 50%-ной и изменяться в соответствии с сигналом ошибки: пропорционально ошибке в линейной зоне усилителя-ограничятеля, величина ограничения которого выбрана из обеспечения соотношения
Uогр=(0,8-0,85)•Um ДОС,
где Uогр - напряжение ограничения усилителя-ограничителя;
U
δm - максимальный угол поворота рулей,
и будет постоянной при величине ошибки, равной или больше напряжения ограничения.
Связь между величиной ошибки управления ΔU=Uу-Uос, измеряемой в Вольтах, с величиной ошибки Δδ, измеряемой в градусах углa отклонения рулей, определяется соотношением
ΔU = KДОС•Δδ.
В соответствии со скважностью прямоугольного сигнала на выходе генератора 12 будет изменяться частота периодического сигнала треугольной формы на выходе генератора 13 в соответствии с зависимостью
где f - частота сигнала;
f0 - начальная частота сигнала;
А - амплитуда сигнала;
|ΔU| - - модуль сигнала ошибки управления.
Очевидно, что при величине ошибки
|ΔU| = 0...(0,8-0,85)A
частота сигнала будет изменяться в соответствии с зависимостью (2) в сторону уменьшения от установленной начальной частоты f0 по линейному закону.
При величине ошибки
|ΔU|≥0...(0,8-0,85)A
частота сигнала, определяемая зависимостью (2), будет составлять постоянную величину, равную
Или для выбранной частоты f0= 200 Гц для рассматриваемого в качестве примера привода эта частота будет равна
f=30-40 Гц.
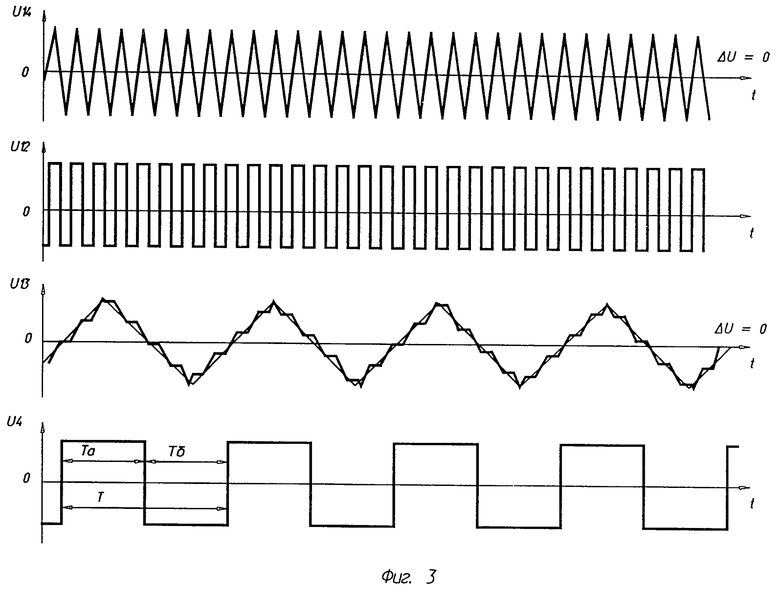
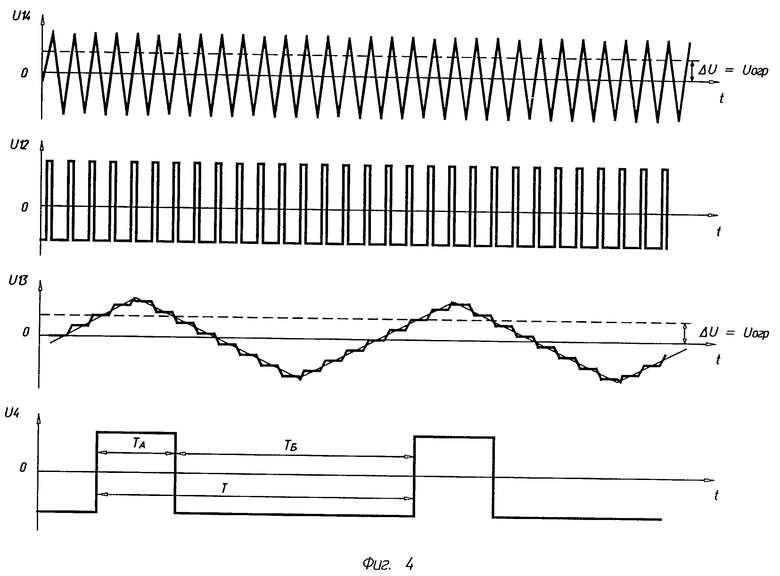
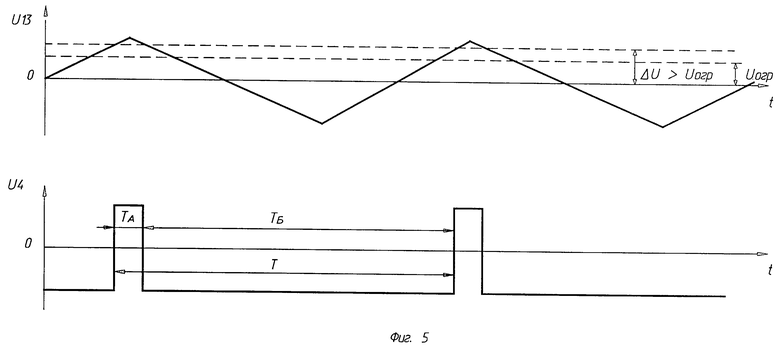
Для иллюстрации работы устройства на фиг.3-5 приведены эпюры напряжений на выходе генератора 14 (напряжение U14), релейного элемента 12 (напряжение U12), генератора 13 (напряжение U13), и релейного элемента 4 (напряжение U4 ), на фиг. 3 - для случая ΔU=0, фиг.4 - для случая ΔU≤Uогр, фиг.5 - для случая |ΔU|≥Uогр.
Из иллюстраций видно, что при увеличении ошибки частота колебаний на выходе релейного элемента 4 уменьшается, увеличивается соответственно период колебаний Т, равный сумме колебаний ТА+TБ, где ТА - соответствует включенному состоянию выходного ключа усилителя мощности, TБ - выключенному.
При этом для случая, когда |ΔU|≤Uогр, значение ТА остается постоянным, a TБ изменяется с изменением ΔU, при |ΔU|>|Uогр|, но |ΔU|<|A| период Т остается постоянным (частота достигает минимального значения, равного  TA уменьшается, а ТБ увеличивается с увеличением |ΔU|.
TA уменьшается, а ТБ увеличивается с увеличением |ΔU|.
При |ΔU|>A TA исчезает, a TБ становится равным бесконечности (на выходе релейного элемента 4 U4 становится постоянным).
Очевидно, что при изменении знака ошибки картина меняется в обратную сторону, т.е. ТA будет увеличиваться, а ТБ уменьшаться с изменением ΔU.
Несмотря на то, что при наличии ошибки управления частота колебаний уменьшается и при больших ошибках даже существенно (становится равной 30-40 Гц вместо f0=200 Гц), тем не менее амплитуда колебаний рулей за период колебаний Т остается малой, так как время ТA включенного состояния управляющего электромагнита 7 за период колебаний T остается значительно меньше периода Т.
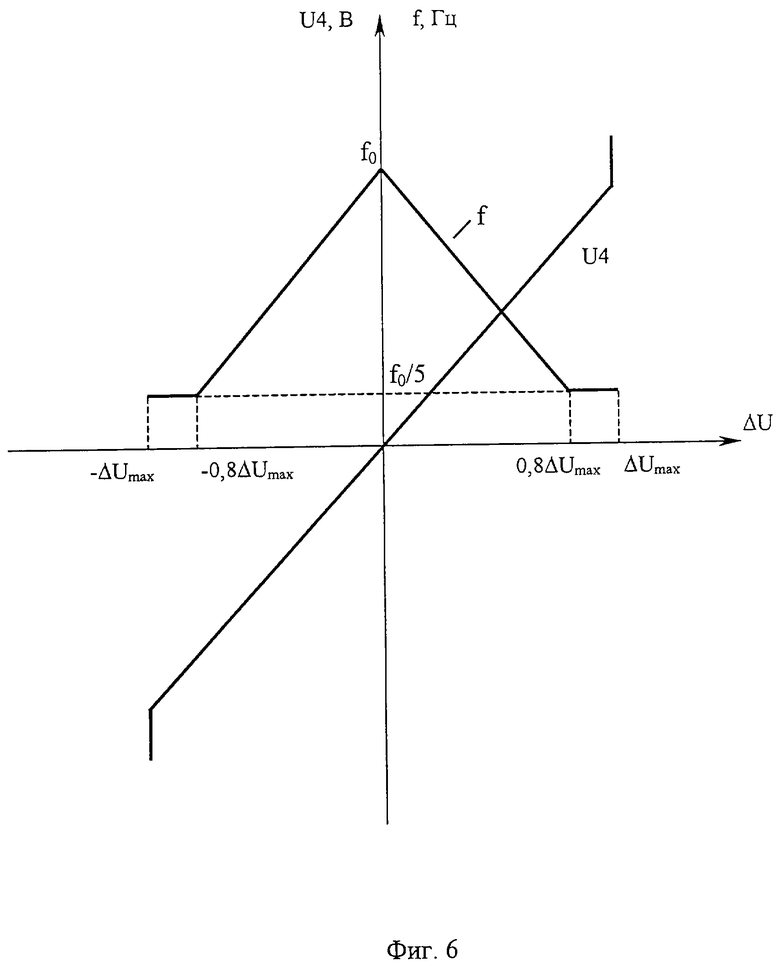
На фиг. 6 приведен график зависимости частоты колебаний f и среднего значения сигнала U4 за период Т на выходе релейного элемента 4 в зависимости от ошибки управления.
Следует отметить, что поскольку линеаризация релейного элемента 4 в приводе производится периодическим сигналом треугольной формы сравнительно большой амплитуды, равной величине линейной зоны по углу отклонения рулей A = KДОС•δm, что приводит к уменьшению добротности привода, а следовательно, быстродействия и точности, то для компенсации этого уменьшения на усилителе 3 вводится требуемый коэффициент усиления, например, для рассматриваемого привода этот коэффициент равен 2.
Принципиально представляется возможным объединить функции блока вычитания 2 и усилителя 3 в одном блоке, реализуемом, например, на базе операционного усилителя, как это сделано на принципиальной электрической схеме устройства, приведенной на фиг.2.
Кроме того, в случае необходимости на этом же блоке может быть реализован также и корректирующий фильтр.
На схеме фиг.2 выделены пунктирными линиями с соответствующими цифрами элементы принципиальной схемы, приведенной на фиг.1. Схема реализована на универсальных операционных усилителях типа 140 УД 6 кроме усилителей У5, У6 и У7. Они должны быть реализованы на быстродействующих операционных усилителях типа 544 УД 2 А. Управляемый электронный ключ VTI - на базе полевого транзистора типа 2П303Г.
В блоке выделения модуля II (фиг.2) обеспечиваются следующие соотношения между параметрами элементов схемы:
R17=R21=2R18
R12=R16=R18.
Предлагаемый способ управления электропневматическим рулевым приводом управляемого снаряда и устройство для его реализации позволили обеспечить минимальную допустимую амплитуду колебаний рулей при действии на рулях знакопеременной шарнирной нагрузки, уменьшить лобовое сопротивление снаряда, повысить точность работы привода как в режиме отработки сигналов управления, так и в режиме удержания нулевого положения рулей при отсутствии сигналов управления при сохранении высокого быстродействия привода.
Таким образом, предлагаемое техническое решение по сравнению с известным позволяет существенно уменьшить амплитуду колебаний рулей, повысить точность работы привода в широком диапазоне знакопеременных шарнирных нагрузок практически без заметного увеличения массы и габаритов аппаратуры управления в управляемом снаряде, существенно снизить лобовое сопротивление снаряда без увеличения массы и габаритов двигательной установки.
Источники информации
1. Электропневматический рулевой привод. В кн.: Б.Г.Крымов, Л.В.Рабинович, В. Г. Стеблецов. Исполнительные устройства систем управления летательными аппаратами. - М.: Машиностроение, 1987, стр. 116, рис. 3.4, стр. 8, 9.
2. Релейная система автоматического регулирования. В кн.: Теория автоматического регулирования. /Под ред. Солодовникова В.В. Кн. 3. Теория нестационарных, нелинейных и самонастраивающихся систем автоматического регулирования. Ч. II. - М.: Машиностроение, 1969. стр. 9, рис. XIII.I, стр. 25, разд. 3.
3. Автоколебательный рулевой привод управляемого снаряда 9M117. Техническое описание и инструкция по эксплуатации ЗУБК 10.00.000 ТО. - М.: Военное издательство, 1987, стр. 15-19, рис. 11.
4. Автоколебательный автопилот управляемого снаряда. RU, патент 2092784, кл. 6 F 42 В 15/01, G 05 B 11/16, БИ 28, 10.10.97.
5. Релейная автоколебательная система управления для объектов с изменяющимися параметрами. В кн.: Петров Б.Н., Рутковский В.Ю., Крутова И.Н., Земляков С.Д. Принципы построения и проектирования самонастраивающихся систем управления. - М.: Машиностроение, 1972, стр. 233-243.
Изобретение относится к оборонной технике, к управляемым снарядам. Задачей изобретения является уменьшение амплитуды колебаний рулей электропневматического рулевого привода управляемого снаряда при действии знакопеременной шарнирной нагрузки на рулях, уменьшение лобового сопротивления снаряда без увеличения массы и габаритов двигательной установки, повышение точности обработки сигналов управления и точности удержания нулевого положения рулей при отсутствии сигналов управления без увеличения массы и габаритов аппаратуры управления. Поставленная задача решается за счет того, что в способе управления электропневматическим рулевым приводом управляемого снаряда, основанным на измерении угла поворота рулей δ, сравнении измеренного значения с заданным и формировании сигнала управления, подаваемого на привод, путем пропускания сигнала ошибки управления углом поворота рулей Δδ через усилитель и первый релейный элемент, для формирования сигнала управления на привод сигнал ошибки управления с выхода усилителя пропускают через последовательно соединенные усилитель-ограничитель и блок выделения модуля и подают на первый вход второго релейного элемента, на второй вход которого подают периодический сигнал треугольной формы фиксированной частоты с выхода генератора сигнала, выходной сигнал второго релейного элемента подают на вход генератора периодического сигнала треугольной формы управляемой частоты, частоту сигнала которого изменяют в соответствии с первой математической зависимостью. Выходной сигнал генератора управляемой частоты подают на второй вход первого релейного элемента. Начальную частоту сигнала генератора управляемой частоты устанавливают из условия обеспечения допустимой заданной амплитуды колебаний рулей при действии знакопеременной шарнирной нагрузки на привод, а амплитуду сигнала - из условия, определяемого второй математической зависимостью. Частоту генератора сигнала фиксированной частоты устанавливают существенно выше начальной частоты генератора сигнала управляемой частоты из условия обеспечения минимальной допустимой амплитуды пульсаций сигнала генератора управляемой частоты, а амплитуду сигнала - равной выбранной из условия, определяемого первой математической зависимостью. Уровень ограничения усилителя-ограничителя выбирают из обеспечения соотношения, определяемого третьей математической зависимостью. 2 с.п. ф-лы, 6 ил.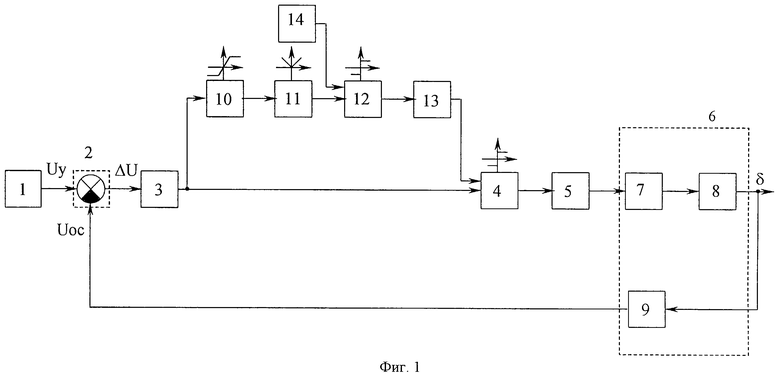
где f - частота сигнала;
f0 - начальная частота сигнала;
А - амплитуда сигнала;
|ΔU| - модуль сигнала ошибки управления,
выходной сигнал генератора управляемой частоты подают на второй вход первого релейного элемента, начальную частоту сигнала генератора управляемой частоты устанавливают из условия обеспечения допустимой заданной амплитуды колебаний рулей при действии знакопеременной шарнирной нагрузки на привод, а амплитуду сигнала - из условия
A = KДОС•δm, (1)
где А - амплитуда периодического сигнала треугольной формы;
КДОС - коэффициент передачи датчика угла поворота рулей рулевого привода;
δm - максимальный заданный угол поворота рулей по упорам,
частоту генератора сигнала фиксированной частоты устанавливают существенно выше начальной частоты генератора сигнала управляемой частоты из условия обеспечения минимальной допустимой амплитуды пульсаций сигнала генератора управляемой частоты, а амплитуду сигнала, равную выбранной из условия (1), уровень ограничения усилителя-ограничителя выбирают из обеспечения соотношения
Uогр = (0,8-0,85)•U
где Uогр - напряжение ограничения усилителя-ограничителя;
U
| АВТОКОЛЕБАТЕЛЬНЫЙ АВТОПИЛОТ УПРАВЛЯЕМОГО СНАРЯДА | 1992 |
|
RU2092784C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПНЕВМАТИЧЕСКИМ РУЛЕВЫМ ПРИВОДОМ УПРАВЛЯЕМОГО СНАРЯДА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1997 |
|
RU2138767C1 |
| DE 4009549 А1, 26.09.1991 | |||
| DE 4019482 А1, 09.01.1992. | |||

