Изобретение относится к области репульсионных электродвигателей с бесконтактной полупроводниковой коммутацией, преимущественно используемых в качестве электроприводов механизмов при питании от сети однофазного переменного тока.
Известны репульсионные электрические машины в виде однофазных коллекторных двигателей переменного тока (двигателей Томсона, Дери), характеристики которых изучены и описаны в научной и учебной литературе [1,2,3].
Известными недостатками таких машин являются плохие условия коммутации тока на коллекторе, недостаточная эксплуатационная надежность, большие масса и стоимость.
Известны также репульсионные вентильные двигатели [4,5], в которых коллектор и щеточно-контактный узел машин [1,2,3] заменен расположенными на роторе полупроводниковыми вентилями, коммутирующими токи в отдельных секциях обмотки ротора по управляющим электростатическим [4] или магнитным [5] сигналам от устройств, расположенных на статоре. С этой целью обмотка статора расположена на разделенных на две части [4] явновыраженных полюсах, одна из которых выполнена из магнито- и электропроводящего материала. На эти части полюсов через выпрямительное устройство подаются электрические потенциалы разной полярности в зависимости от требующегося направления вращения ротора.
Общим и основным недостатком двигателей [4,5] является наличие на вращающемся роторе полупроводниковых коммутаторов и усложненная конструкция статора.
Наиболее близким к заявленному техническому решению является принятый в качестве прототипа вентильный двигатель, описанный в [6], где с целью упрощения конструкции, снижения массы и габаритов репульсионных двигателей используется тот же основной принцип - размещение на роторе полупроводникового коммутатора вместо коллектора со щеточно-контактным узлом. При этом управление коммутатором осуществляется оптоэлектронной системой вместо магнитного или электрического полей.
Основным недостатком конструкции двигателя-прототипа остается наличие на вращающемся роторе полупроводниковых вентилей, но со светочувствительными элементами, зеркальными и светопоглощающими кольцами. Недостаток усугубляется усложнением конструкции статора из-за наличия явновыраженных полюсов, светопоглощающих и зеркальных секторов, а также гибких шторок, трущихся о кольца ротора. Для обеспечения реверсивности двигателя требуются два смещенных аксиально комплекта зеркальных колец и светочувствительных элементов на роторе, зеркальных и светопоглощающих секторов, источников света на статоре. Зеркальные и светопоглощающие поверхности элементов выполняются напылением или осаждением соответствующих материалов. Все это негативно отражается на надежности, вибро- и ударостойкости машины, усложняет конструкцию ротора и статора, увеличивает стоимость двигателя.
Целью изобретения является повышение надежности, упрощение конструкции, уменьшение стоимости двигателя.
Указанная цель достигается за счет изменения принципа вращения ротора заявляемого двигателя по сравнению с прототипом и традиционными репульсионными двигателями, в которых магнитные оси пульсирующих полей обмоток статора неподвижны в пространстве. В заявляемом двигателе оси пульсирующих полей статора вращаются в пространстве, "толкая" перед собой ротор. С этой целью обмотки цилиндрического ротора расположены по продольным осям полюсов и замкнуты накоротко, три или более фазы обмотки статора с тем же числом полюсов равномерно распределены по цилиндрической расточке сердечника статора и включены на напряжение питающей сети через расположенный на статоре тиристорный коммутатор с естественной коммутацией вентилей, которые управляются сигналами от датчика положения ротора.
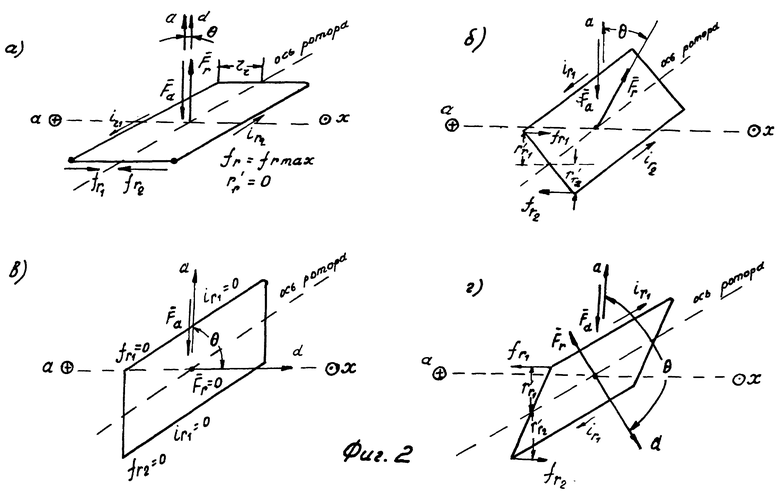
Обмотка статора 1 аналогична обычным многофазным симметричным обмоткам машин переменного тока. Число короткозамкнутых обмоток 3 ротора 2 равно числу полюсов или пар полюсов обмотки статора. Все обмотки ротора могут быть также соединены последовательно, но обязательно согласно в магнитном и электрическом отношении, и представляет единую короткозамкнутую обмотку с числом полюсов, равным числу полюсов обмотки статора. Электромеханическая часть II двигателя, кроме статора и ротора с обмотками, содержит датчик 9 положения ротора (ДПР) любого типа (например, опто- или магнитоэлектронного). На электромеханической части размещен также полупроводниковый коммутатор 4 с блоком 5 симметричных тиристоров 6, 7, 8, каждый из которых включен в цепь питания соответствующей фазы статора 1 и работает с естественной коммутацией от сети переменного напряжения. Входящая в коммутатор 4 система управления 10 предназначена для коммутации цепей управления тиристорами 6, 7, 8 через электронные ключи ДПР 9 с возможностью обеспечения реверса двигателя. При прямом направлении вращения ротора управляющие сигналы от ДПР 9 через систему 10 открывают тиристоры 6, 7, 8 и подают напряжение от питающей сети переменного тока на фазы обмотки статора 1 поочередно на каждую из них, или на группы фаз, или, например, на фазу "а", на две - "а" и "в", на следующие одну "в", две - "в" и "с" и т.д. Изменение направления вращения двигателя осуществляется (возможно дистанционно) с помощью системы управления 10 путем изменения последовательности управляющих сигналов от ДПР 9 на открытие тиристоров от 6-7-8 (при прямом вращении) на последовательность 6-8-7 (при обратном вращении) простым переключением цепей управления тиристоров.
Соответствующая настройка угловых параметров ДПР обеспечивает возможность оптимального выбора последовательности и длительности коммутации фаз, групп фаз, момента их включения по отношению к положению ротора. Критериями оптимизации настройки ДПР являются максимальное значение момента, развиваемого двигателем, и минимизация его пульсации из-за периодической перекоммутации фаз обмотки статора. Оптимизации по этим критериям в зависимости от назначения двигателя подлежат также число фаз и число пар полюсов обмотки статора и соответственно число полюсов (короткозамкнутых обмоток) ротора.
Сопоставительный анализ с прототипом показывает, что заявляемый двигатель отличается тем, что на его роторе исключены полупроводниковый коммутатор, электронные и оптические элементы его системы управления; ДПР предлагаемого двигателя обеспечивает простоту и надежность системы управления простейшим полупроводниковым коммутатором, размещенным на более простом по конструкции статоре. Указанные отличия повышают в целом надежность двигателя, упрощают его конструкцию, снижают его стоимость.
Таким образом, заявляемый двигатель соответствует критерию "новизна".
Сравнение заявляемого технического решения не только с прототипом, но и с другими техническими решениями в области репульсионных двигателей, не позволило выявить в них признаки, отличающие заявляемое решение от прототипа, что позволяет сделать вывод о соответствии критерию "изобретательский уровень".
Изобретение поясняется чертежами, где на фиг.1 показана принципиальная электрическая схема экспериментального макета репульсионного вентильного реверсивного двигателя; фиг.2 - пространственные диаграммы МДС обмоток статора и ротора; фиг.3 - диаграмма угловых параметров ДПР; фиг.4 - временная диаграмма очередности и длительности работы фаз статора.
Экспериментальный макет вентильного репульсионного двигателя создан на основе универсального модельного генератора типа МТ-30-1000 (230 В, 50 Гц, 1000 об/мин) [7]. Шестисекционные обмотки фаз статора за счет переключения секций позволяют создать трех- или шестифазную машину со сдвигом магнитных осей фаз в 120, 60 и 30 эл.гр.
Электромеханическая часть II (фиг.1) макета двигателя содержит статор 1, ротор 2 и ДПР 9. В базовом варианте обмотка 1 статора имеет три фазы, соединенные звездой с нулевым проводом, и три пары полюсов. На роторе 2 обмотка возбуждения и продольный демпферный контур замкнуты накоротко и составляют эквивалентные короткозамкнутые контуры 3 с магнитными осями вдоль шести продольных полюсов "d" цилиндрического ротора 2. Питание от сети переменного напряжения частотой 50 Гц подается на каждую из фаз статора через нулевой провод и соответствующий тиристор 6, 7 или 8 блока 5 коммутатора 4. Такая схема питания обеспечивает наибольшую простоту тиристорного преобразователя 5 и исключает возможность короткого замыкания цепи источника питания через тиристорный коммутатор.
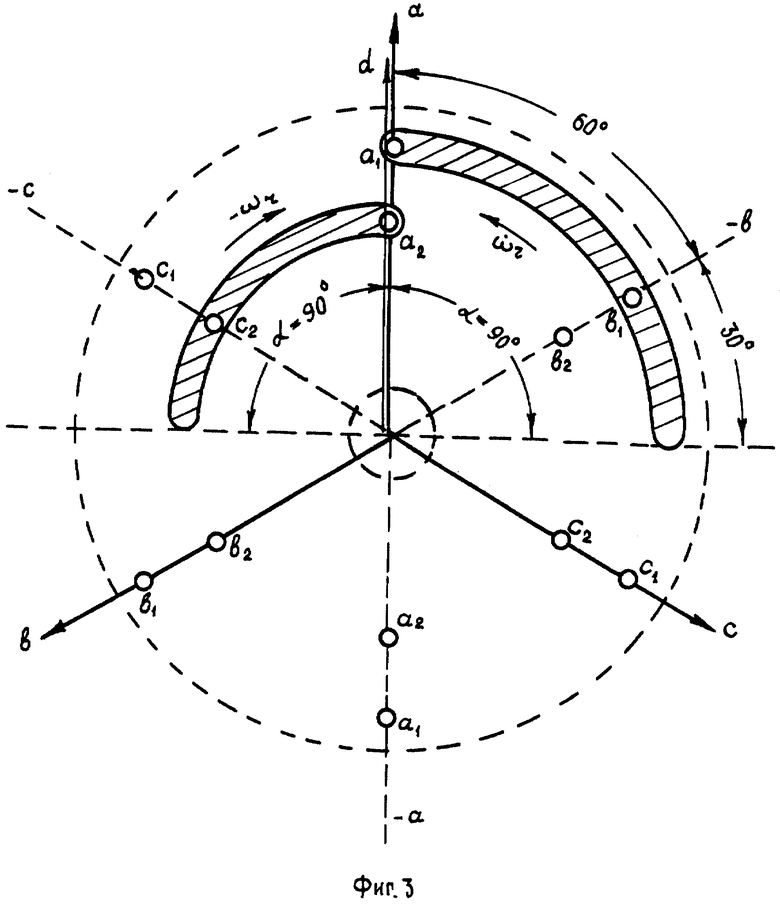
При работе двигателя пространственные диаграммы МДС обмоток статора и ротора при различных углах θ поворота продольной оси ротора "d" (фиг.1) относительно магнитной оси фазы "а" принципиально мoгут быть представлены в виде фиг.2. Для упрощения обмотка ротора представлена одним витком с диаметральным шагом,  и
и  - векторы МДС статора и ротора; ir1 и ir2 - направления токов в данный момент времени;
- векторы МДС статора и ротора; ir1 и ir2 - направления токов в данный момент времени;  и
и  - направления электромагнитных сил, действующих на правую и левую стороны витка; r'r1 и r'r2 - плечи электромагнитных моментов, создаваемых соответствующими силами. Из диаграмм фиг. 2 следует, что основные электромагнитные величины для фиксированных углов θ будут иметь следующие значения: а) θ=0, r'r=0, i=imax, fr=frmax, (момент) m=0, неустойчивое равновесие; в) θ=-900, r'r1=r'maх, i=0, fr=0, m= 0, устойчивое равновесие; б) и г) - промежуточные положения витка при θ и m меньше или больше нуля. Таким образом, в результате взаимодействия переменных потоков статора и ротора создается электромагнитный момент, "толкающий" ротор "впереди" поля статора в ту или другую сторону в зависимости от начального расположения оси "d" ротора по отношению к оси "а" статора. Знак момента сохраняется на участке поворота ротора, равном ±90 эл.гр. от оси фазы статора. При дальнейшем движении ротора знак момента изменяется на противоположный. В зависимости от конкретной конструкции ротора реальная картина взаимодействия обмоток статора и ротора несколько изменится, но принципиальные закономерности сохранятся, что подтверждено исследованиями на экспериментальном макете двигателя.
- направления электромагнитных сил, действующих на правую и левую стороны витка; r'r1 и r'r2 - плечи электромагнитных моментов, создаваемых соответствующими силами. Из диаграмм фиг. 2 следует, что основные электромагнитные величины для фиксированных углов θ будут иметь следующие значения: а) θ=0, r'r=0, i=imax, fr=frmax, (момент) m=0, неустойчивое равновесие; в) θ=-900, r'r1=r'maх, i=0, fr=0, m= 0, устойчивое равновесие; б) и г) - промежуточные положения витка при θ и m меньше или больше нуля. Таким образом, в результате взаимодействия переменных потоков статора и ротора создается электромагнитный момент, "толкающий" ротор "впереди" поля статора в ту или другую сторону в зависимости от начального расположения оси "d" ротора по отношению к оси "а" статора. Знак момента сохраняется на участке поворота ротора, равном ±90 эл.гр. от оси фазы статора. При дальнейшем движении ротора знак момента изменяется на противоположный. В зависимости от конкретной конструкции ротора реальная картина взаимодействия обмоток статора и ротора несколько изменится, но принципиальные закономерности сохранятся, что подтверждено исследованиями на экспериментальном макете двигателя.
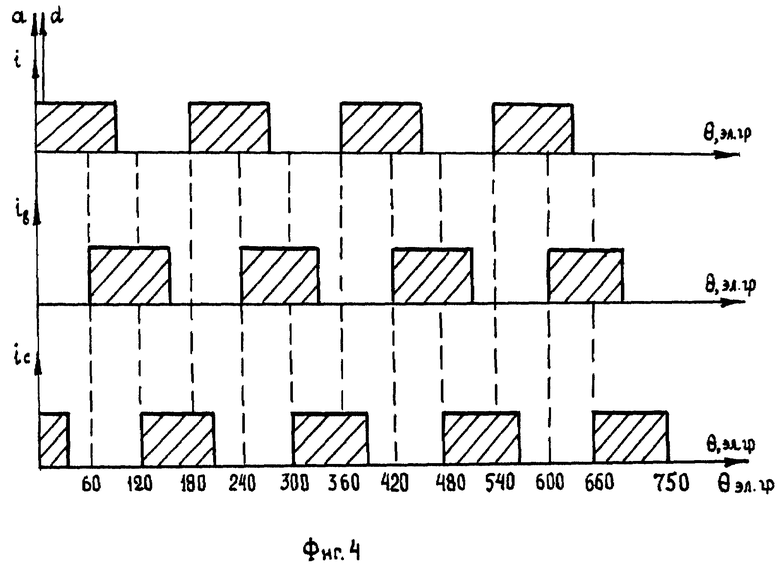
Исходя из рассмотренной зависимости вращающего момента от угла θ, выбираются установочные угловые параметры ДПР (фиг.1). Настройка ДПР должна с помощью тиристоров 6, 7, 8 обеспечивать подачу напряжения на фазу статора в момент времени, когда ось ротора сместится относительно оси фазы статора в требующемся направлении вращения. Это условие обеспечивается диаграммой угловых параметров ДПР, представленной на фиг.3, где обозначения а, в, с соответствуют магнитным осям фаз, аk, вk, сk (к=1,2) - электронным ключам в цепях управления тиристорами 6, 7, 8 при вращении ротора соответственно в прямом (к= 1) и обратном (к=2) направлениях. Продольная ось (магнитная ось обмотки) ротора обозначена символом "d". В общем случае наиболее рациональными являются установочные параметры ДПР, обеспечивающие длительность одного периода работы каждой фазы статора равной 90 эл.гр. с промежутками между ними по 90 эл.гр. При этом целесообразна настройка ДПР, обеспечивающая работу фазы в течение каждого периода как самостоятельно, так и совместно с предыдущей и последующей по 30 эл.гр. Таким образом, ДПР должен обеспечивать работу фаз в последовательности: а-ас-с-св-в-ва-а и т.д. Последовательности а-ав-в-вс-с-са-а... соответствует противоположное направление вращения ротора. Такой режим работы обеспечивается угловым размером контактного (оптического, магнитного, электронного) сектора ДПР α=90 эл.гр. (фиг.3). На фиг. 3, например, для оптоэлектронного варианта ДПР заштрихованные участки соответствуют щелям вдоль кольцевых дорожек на вращающемся с ротором диске между расположенными на статоре на радиусе кольцевых дорожек (щелей) соосно светодиодами и фотодиодами в цепях управления тиристорами 6, 7, 8 (фиг.1).
Для обеспечения реверса в зависимости от требующегося направления вращения с помощью системы управления 10 (фиг.1) включаются электрические цепи тех или других ключей аk, вk, сk (фиг.3) на отпирание тиристоров 6, 7, 8.
Диаграмма на фиг.3 приведена в наиболее удобном для физического анализа конструктивном варианте ДПР. Технологически более выгодно во вращающемся диске ДПР (фиг.3) иметь вторую пару щелей, симметричных указанным (заштрихованным участкам) относительно оси вращения ротора и имеющих угловые размеры тоже по 90 эл. гр. В этом случае в ДПР отпадает необходимость во вторых комплектах электронных ключей аk, вk, сk.
Временная диаграмма очередности и длительности работы трех фаз статора представлена на фиг.4.
Таким образом, наличие на роторе двигателя только короткозамкнутых обмоток без полупроводниковых, напыляемых зеркальных и светопоглощающих элементов, а также существенное упрощение конструкции цилиндрического статора с простейшим тиристорным коммутатором без зеркальных и светопоглощающих секторов и гибких трущихся шторок повышает надежность и уменьшает стоимость предлагаемого двигателя по сравнению с прототипом.
Источники информации
1. М.П. Костенко, Л.М. Пиотровский. Электрические машины. Ч. 2. Л.: Энергия, 1973, с. 577-580.
2. А.И. Вольдек. Электрические машины. Л.: Энергия, 1974, с. 816-818.
3. А. В. Иванов-Смоленский. Электрические машины. М.: Энергия, 1980, с. 809-811.
4. А.c. СССР 1622915, МКИ Н 02 К 29/06, заявл. 03.10.88 г., опубл. РФ // Изобретения стран мира, 8, вып.107.
5. А.с. СССР 1624618, МКИ Н 02 К 29/08, заявл. 22.03.88 г., опубл. РФ // Изобретения стран мира, 8, вып.107.
6. А.с. СССР 1665471, МКИ Н 02 К 29/10, заявл. 19.04.88 г., опубл. РФ // Изобретения стран мира, 20, вып.107. - прототип.
7. В.А. Веников. Теория подобия и моделирование применительно к задачам электроэнергетики. М.: Высшая школа, 1966.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВОДОМЕТНЫЙ ДВИЖИТЕЛЬНО-ДВИГАТЕЛЬНЫЙ КОМПЛЕКС | 2001 |
|
RU2204502C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТОВ ФАЗОВЫМ МЕТОДОМ ПРИ ИСПОЛЬЗОВАНИИ РАЗНОСТНО-ДАЛЬНОМЕРНОЙ РАДИОНАВИГАЦИОННОЙ СИСТЕМЫ | 1994 |
|
RU2181898C2 |
| ПУСКОВАЯ ТОПЛИВНАЯ СИСТЕМА КОРАБЕЛЬНЫХ ГАЗОТУРБИННЫХ ДВИГАТЕЛЕЙ | 2001 |
|
RU2201516C2 |
| ВОДОМЕТНЫЙ ДВИЖИТЕЛЬ ПОДВОДНОГО СУДНА | 2001 |
|
RU2213677C2 |
| РОТОР ТИПА САВОНИУСА | 1994 |
|
RU2182258C2 |
| ГИДРОДИНАМИЧЕСКАЯ УСТАНОВКА ДЛЯ МОДЕЛЬНЫХ ИСПЫТАНИЙ ПОДВОДНЫХ СНАРЯДОВ | 1995 |
|
RU2203469C2 |
| ПРУЖИННЫЙ ВИБРОИЗОЛЯТОР С ДЕМПФИРУЮЩИМ ЭЛЕМЕНТОМ | 1999 |
|
RU2173803C2 |
| УСТРОЙСТВО ДЛЯ ИСПЫТАНИЯ УПРУГИХ МУФТ | 2001 |
|
RU2206880C2 |
| ВОДОМЕТНЫЙ ДВИЖИТЕЛЬ СУДНА | 1999 |
|
RU2168443C1 |
| ДВУХРЕЖИМНЫЙ ВОДОЗАБОРНИК ВОДОМЕТНОГО ДВИЖИТЕЛЯ ВЫСОКОСКОРОСТНОГО СУДНА | 2000 |
|
RU2184678C2 |
Использование: в качестве электроприводов механизмов при питании от сети однофазного переменного тока. Технический результат заключается в повышении надежности, упрощении конструкции, уменьшении стоимости. Электродвигатель содержит статор с цилиндрической расточкой сердечника и симметрично размещенными в нем тремя или более фазами обмотки, соединенной в звезду с нулевым проводом. Цилиндрический ротор имеет короткозамкнутые обмотки по числу полюсов обмотки статора. На фазы статора поочередно подается напряжение питающей сети через расположенные на статоре тиристоры полупроводникового коммутатора по управляющим сигналам от датчика положения ротора через электронную систему управления. С помощью последней может быть изменена последовательность подачи сигналов от датчика на открытие тиристоров, что обеспечивает возможность реверса двигателя. Настройка датчика оптимизируется для получения наибольшей величины и наименьшей пульсации вращающего момента на валу двигателя. Вращение магнитных осей потока обмотки статора позволило полупроводниковый коммутатор с системой управления перенести с вращающегося ротора на статор. 4 ил.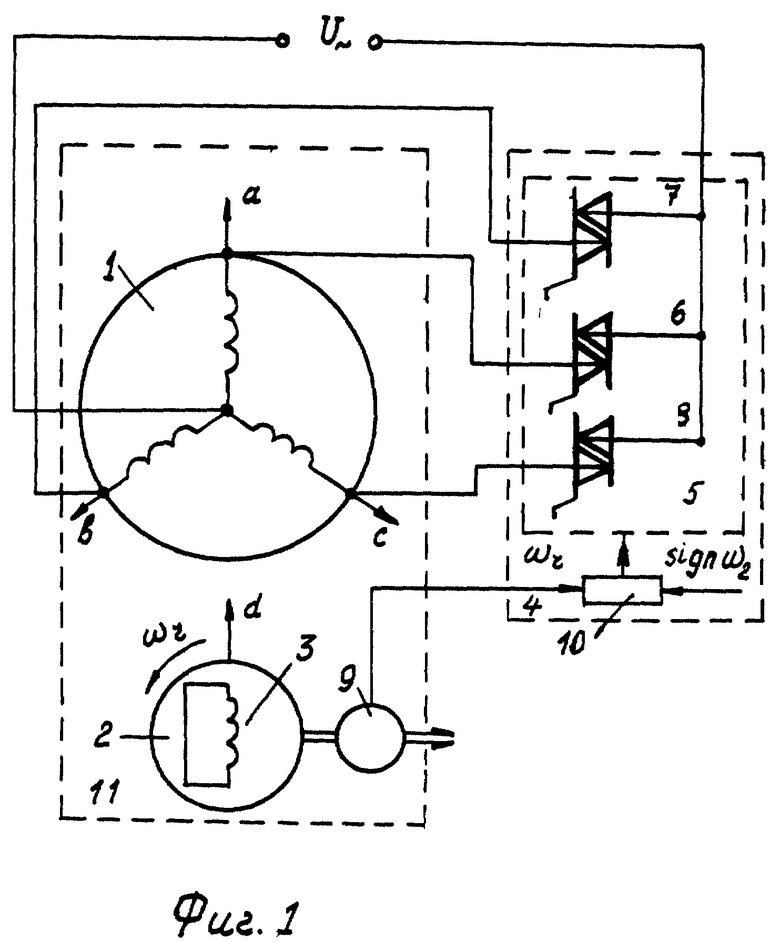
Репульсионный вентильный реверсивный электродвигатель, содержащий цилиндрический ротор с изолированными обмотками, а также статор с обмоткой, питающейся от сети однофазного переменного тока, отличающийся тем, что обмотки цилиндрического ротора расположены по продольным осям полюсов и замкнуты накоротко, три или более фазы обмотки статора с числом полюсов, равным общему числу полюсов обмотки ротора, равномерно распределены по цилиндрической расточке сердечника статора и включены на напряжение однофазной питающей сети через расположенный на статоре тиристорный коммутатор с естественной коммутацией вентилей, которые управляются сигналами от датчика положения ротора.
| Вентильный репульсионный электродвигатель | 1988 |
|
SU1665471A1 |
| Репульсионный вентильный электродвигатель | 1988 |
|
SU1624618A1 |
| Репульсионный вентильный реверсивный электродвигатель | 1988 |
|
SU1622915A1 |
| Способ выделения эндонуклеазы | 1972 |
|
SU537512A1 |
| DE 3722805 A1, 19.01.1989 | |||
| АРАКЕЛЯН А.К., АФАНАСЬЕВ А.А | |||
| Вентильные электрические машины и регулируемый электропривод, ч.1 | |||
| - М.: Энергоатомиздат, 1997, с.249, 255, 327 | |||
| ЛЕБЕДЕВ Н.И., ГАНДШ | |||
| У В.М., ЯВДОШАН Я.И | |||
| Вентильные электрические машины | |||
| - С-Пб.: Наука, 1996, с.29, 41, 77, 159,262 . | |||
