Изобретение относится к устройствам для точного воспроизведения трансцендентных кривых циклоидального типа, в частности, к устройствам для воспроизведения синусоиды, а также к устройствам, выполняющим математические операции, в данном случае - сложение двух периодических функций.
Известно устройство для воспроизведения синусоиды, содержащее платформу, направляющую, колесо, рейку и два различные по длине стержня, при этом больший стержень выполнен с держателем на одном конце, рейка размещена на платформе параллельно направляющей и соединена с колесом постоянно с возможностью качения без проскальзывания, а один конец меньшего стержня установлен на направляющей с возможностью перемещения вдоль нее [1].
Это устройство реализует воспроизведение синусоиды по традиционной кинематической схеме путем сложения поступательного и вращательного движений, т. е. в результате сложного движения. Поэтому оно соответственно содержит много конструктивных элементов, является достаточно сложным и, следовательно, неточным и неудобным. Наличие подвижной направляющей (кулисы) также снижает точность воспроизведения [2], стр. 426: "С уменьшением числа звеньев уменьшаются погрешности изготовления, и потому приближенные направляющие механизмы часто оказываются практически более точными...". Диапазон размеров синусоиды и протяженность непрерывно воспроизводимых ее участков ограничены габаритами, в частности, размером рамы (поз. 10 в описании [1]). Кроме того, хотя изменение размерных параметров воспроизводимой синусоиды в данном устройстве возможно, но в сильно ограниченных пределах в силу громоздкости, сложности и неудачного способа компоновки, причем переналадка на новые параметры требует серьезных конструктивных мер и больших затрат времени. Складывать синусоидальные траектории это устройство не позволяет.
Заявляемое изобретение предназначено для расширения арсенала наиболее простых, удобных, точных и быстро переналаживаемых (гибких) устройств для воспроизведения синусоидальной траектории определенной точкой специально движущегося звена механизма при наименьшем количестве звеньев, а также для получения возможности складывать синусоидальные траектории. При этом используются меньшее число звеньев и соответствующая их компоновка, а также отсутствует такое снижающее точность звено, как кулиса (способ соединения стержней).
Вышеуказанная задача решается тем, что устройство для воспроизведения и сложения синусоидальных траекторий общего вида, содержащее платформу, направляющую, колесо, рейку, которая размещена на платформе параллельно направляющей и соединена с колесом постоянно с возможностью его качения по ней без проскальзывания, при этом устройство содержит стержни, различающиеся по длине в два раза, причем больший стержень выполнен с держателем на одном конце, а меньший стержень одним из своих концов шарнирно соединен с серединой большего, а колесо жестко связано с меньшим стержнем таким образом, что конец стержня, скользящий по направляющей, размещен в центре колеса, а больший стержень другим концом установлен на направляющей с возможностью перемещения вдоль нее так, что стержни при этом образуют λ-образную группу, причем на колесе закреплены три λ-образные группы таким образом, что меньший стержень одной из них является диагональю параллелограмма, построенного на малых стержнях как на сторонах двух других λ-образных групп, соответствующих складываемым синусоидам.
Постоянный контакт рейки и колеса и отсутствие проскальзывания при качении по рейке колеса, жестко связанного с малыми стержнями, для обеспечения надежного замыкания кинематической цепи может обеспечиваться, в частности, за счет фрикционного соединения, или за счет выполнения рейки и колеса зубчатыми при поджатии их друг к другу с помощью пружин, или с использованием сил тяжести при специальном расположении механизма по отношению к вертикали, или каким-либо другим способом. Отличительной особенностью этого механизма является, в частности, отсутствие кулис, использование которых снижает точность воспроизведения, и сравнительно небольшое количество звеньев.
Ведущее звено здесь не указывается в связи с тем, что, как отмечается Артоболевским [3, стр. 5-6] , при решении тех или иных инженерных задач, связанных, например, с обработкой изделия заданного профиля, или с перемещением точек исполнительных органов машин по заданной траектории, или с выполнением математических операций и т. д., выбор звена в качестве ведущего осуществляется в соответствии с требованиями технологического или математического процессов, в частности, с требованиями к динамическим возможностям движения всего механизма в целом. В некоторых случаях такую роль могут играть звенья, не связанные с платформой (стойкой) и приводимые в движение дополнительной двухповодковой группой или вращательно-поступательной парой.
Получаемый при осуществлении изобретения технический результат, а именно сложение графиков гармонических колебаний, повышение точности воспроизведения синусоидальных траекторий определенной точкой специально движущегося звена, достижение удобства при использовании, снижение времени переналадки, при наименьшем количестве звеньев, расширение диапазона размеров воспроизводимых синусоид и протяженности непрерывно воспроизводимых ее участков, достигается за счет того, что наличие катящегося без скольжения колеса, жестко связанного со стержнями, обеспечивает специальное движение больших стержней, один из концов каждого из которых при этом движется по своей синусоиде, в то время как другие их концы скользят по направляющей. При этом конец большего стержня той λ-образной группы, малый стержень которой расположен по диагонали параллелограмма со сторонами их малых стержней двух других групп, будет описывать в силу такого расположения синусоидальную траекторию, являющуюся суммой двух других синусоидальных траекторий.
Особенность реализуемых здесь движений в том, что синусоиды в них описываются не геометрическими точками, а непосредственно точками звеньев механизма, что позволяет исключить в процессе синтеза данного механизма этап "материализации" геометрической точки и соответственно необходимые для этого звенья, в частности, кулису. Такое движение и его параметры определены в результате теоретических исследований автора с помощью специальных неэлементарных функций, в частности эллиптических интегралов 2-го рода. По-видимому, именно поэтому такое движение не было известно до сих пор и не использовалось в технических разработках.
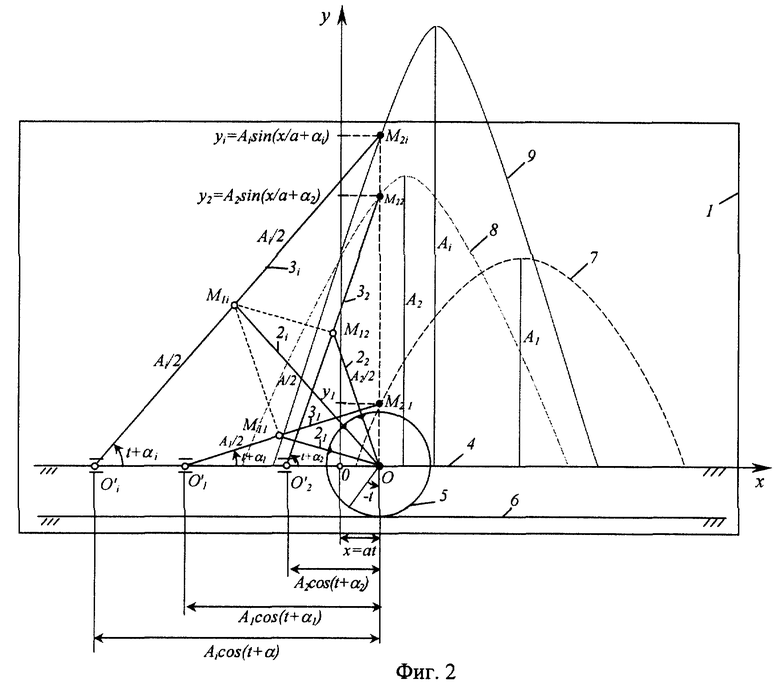
На фиг.1 изображена кинематическая схема фрагмента устройства, поясняющая принцип воспроизведения отдельной синусоиды; на фиг.2 изображена кинематическая схема предлагаемого устройства.
Оно состоит из платформы 1 (фиг.2), стержней 21 22, 2i, 31 32, 3i, направляющей 4, колеса 5 и рейки 6, размещенных на платформе 1, причем рейка 6 параллельна направляющей 4. Колесо 5, жестко связанное со стержнями 21 22, и 2i, постоянно соединено с рейкой 6 при возможности катиться по ней без скольжения. Оканчивающиеся штифтом О концы стержней 21, 22, 2i расположены в центре колеса 5 с возможностью скользить по направляющей 4. Стержни 21, 22, 2i другими своими концами М11, М12, М1i шарнирно соединены с серединой соответственно стержней 31, 32, 3i, которые оканчиваются соответственно штифтами O'1, O'2, O'i, способными скользить по направляющей 4. Другие концы М21, М22, М2i стержней 31, 32, 3i указывают точки на воспроизводимых синусоидах и оканчиваются держателями (на фиг. 2 их положения совпадают с точками М21, М22, М2i), которые при необходимости могут нести пишущий узел, или инструмент для разметки, обработки, сварки, или перемещаемую деталь, или любой иной удерживаемый, перемещаемый объект. При указанном расположении малого стержня третьей λ-образной группы конец М2i большего стержня этой группы будет описывать синусоидальную траекторию 9, являющуюся суммой двух других синусоид 7, 8, описываемых концами М21, М22 больших стержней первых двух λ-образных групп.
Конструктивные размеры при этом удовлетворяют следующим соотношениям для каждой λ-образной группы стержней:


где α - радиус колеса, определяющий период T = 2aπ всех синусоид; длины соответствующих больших стержней, определяющих амплитуды A1 = aλ1, A2 = aλ2, Ai = aλi синусоид,
длины соответствующих больших стержней, определяющих амплитуды A1 = aλ1, A2 = aλ2, Ai = aλi синусоид,  отношения длин больших стержней к радиусу колеса, которое может меняться в зависимости от требуемых параметров соответствующей воспроизводимой синусоиды; эти отношения равны произведению амплитуд на круговую (угловую) частоту 2π/T = 1/a синусоид.
отношения длин больших стержней к радиусу колеса, которое может меняться в зависимости от требуемых параметров соответствующей воспроизводимой синусоиды; эти отношения равны произведению амплитуд на круговую (угловую) частоту 2π/T = 1/a синусоид.
Устройство работает следующим образом. При качении колеса 5 по рейке 6 точка контакта, центр О колеса и абсциссы концов М21, М22, М2i стержней 31, 32, 3i перемещаются вдоль рейки 6 по горизонтали на некоторое расстояние хO, для определенности, например, вправо. При этом колесо 5 вместе со стержнями 21, 22, 2i повернется на угол t по ходу стрелки часов, а стержни 31, 32, 3i - на тот же угол против хода стрелки часов. В силу качения без скольжения между горизонтальным перемещением xо и углом t поворота будет иметь место линейное соотношение xO=at.
Тогда концы М21, М22, М2i стержней 31, 32, 3i будут описывать свои соответствующие синусоиды. Действительно, из фиг.1 и 2 видно, что абсциссы этих точек совпадают друг с другом и с точкой О, и мы будем иметь xO=xM21= xM22=xM2i=at.
Для ординат этих точек М21, М22, М2i получим
yM21 = aλ1sin(t+α1) = aλ1sin(xM21/a+a1);
yM22 = aλ2sin(t+α2) = aλ2sin(xM22/a+a2);
yM2i = aλisin(t+αi) = aλisin(xM2i/a+ai).
Это есть синусоиды с амплитудами aλ1, aλ2, aλi и периодом 2aπ.
Из математических преобразований известно [4, стр. 97-100], [5, стр. 110-111] , что результатом сложения двух синусоид одного периода (двух гармонических колебаний одной частоты) с заданными фазами α1, α2 и амплитудами A1, А2
y1 = A1sin(ωt+α1), y2 = A2sin(ωt+α2), (1)
является тоже синусоида с тем же периодом T = 2π/ω и с определенными фазой αi и амплитудой Аi
y = y1+y2 = Aisin(ωt+αi). (2)
Причем для амплитуды Аi и фазы αi имеем

αi = 2arctg[sinαi/(1+cosαi)]. (5)
Каждая из синусоид y1 = A1sin(ωt+α1), y1 = A1sin(ωt+α1) реализуется данным механизмом (см. фиг. 2), при этом следует считать ω = 1/a. Это для ясности показано также для отдельной синусоиды на отдельном рисунке (фиг.1). Очевидно, что в данном устройстве (фиг.2) результирующая синусоида также реализуется, что достигается таким расположением точки-конца М1i малого стержня, при котором точка М1i находится в вершине параллелограмма, построенного на двух стержнях длины А1/2, А2/2 и, следовательно, в соответствии с теоремой косинусов выполняются соотношения (3), а также (4). Таким образом, данное расположение определяет в соответствии с (3) необходимый размер стержня 3i при сохранении указанного отношения 2:1 между его длиной и длиной стержня 2i. Одна из фаз α1 или α2 определяется исходным положением механизма (конфигурацией сборки) и считается заданной, тогда другая будет находиться из условия равенства разности α2-α1 углу между стержнями 21, 22, который тоже считается задаваемым. Тогда фаза αi определится из соотношения (4)-(5).
Источники, принятые во внимание
1. DE 875571 А, кл. В43 L 11/00, 04/05/1953.
2. Левитский Н.И. Теория механизмов и машин: Учеб. пособие для вузов. - 2-е изд., перераб. и доп. - М.: Наука, 1990. - 592 с.
3. Артоболевский И. И. Теория механизмов для воспроизведения плоских кривых. - М.: Изд-во АН СССР, 1959. - 256 с.
4. Справочник машиностроителя. В шести томах. T.1. (Математика. Теоретическая механика. Теория механизмов и машин). - М.: Машгиз, 1960. - 592 с.
5. Яворский Б.М., Детлаф А.А. Справочник по физике для инженеров и студентов вузов. - М.: Наука, 1968. - 940 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ВОСПРОИЗВЕДЕНИЯ КРИВЫХ И ТРАЕКТОРИЙ ПРОГРАММНОГО ДВИЖЕНИЯ СИНУСОИДАЛЬНОГО ТИПА | 2002 |
|
RU2234125C2 |
| УСТРОЙСТВО ДЛЯ ВОСПРОИЗВЕДЕНИЯ СИНУСОИДЫ ОБЩЕГО ВИДА | 2000 |
|
RU2175610C2 |
| МЕХАНИЗМ ДЛЯ ТОЧНОГО ВОСПРОИЗВЕДЕНИЯ СИНУСОИДЫ | 2000 |
|
RU2174917C2 |
| УСТРОЙСТВО ДЛЯ ВОСПРОИЗВЕДЕНИЯ КРИВЫХ И ТРАЕКТОРИЙ ПРОГРАММНОГО ДВИЖЕНИЯ | 2002 |
|
RU2212342C1 |
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ЧИСЕЛ ИЗ КОДА СИСТЕМЫ ОСТАТОЧНЫХ КЛАССОВ В ПОЛИАДИЧЕСКИЙ КОД | 2001 |
|
RU2187886C1 |
| СПОСОБ МАГНИТНОЙ ЗАПИСИ ЦИФРОВОЙ ИНФОРМАЦИИ | 1995 |
|
RU2082222C1 |
| СПОСОБ МАГНИТНОЙ ЗАПИСИ ЦИФРОВОЙ ИНФОРМАЦИИ | 1999 |
|
RU2180457C2 |
| СПОСОБ МАГНИТНОЙ ЗАПИСИ ЦИФРОВОЙ ИНФОРМАЦИИ | 1996 |
|
RU2138859C1 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА | 1998 |
|
RU2144254C1 |
| СИСТЕМА ОРБИТАЛЬНАЯ ЭЛЕКТРОМЕХАНИЧЕСКАЯ ПРОМЫШЛЕННОГО РОБОТА | 2001 |
|
RU2182534C1 |
Изобретение предназначено для использования при изучении свойств синусоиды как наглядное пособие. Содержит платформу, направляющую, колесо, рейку, которая размещена на платформе параллельно направляющей и соединена с колесом постоянно с возможностью его качения по ней без проскальзывания. Устройство содержит стержни, различающиеся по длине в два раза, больший стержень выполнен с держателем на одном конце, а меньший стержень одним из своих концов шарнирно соединен с серединой большего. Колесо жестко связано с меньшим стержнем, конец стержня, скользящий по направляющей, размещен в центре колеса. Больший стержень другим концом установлен на направляющей с возможностью перемещения вдоль нее так, что стержни образуют λ-образную группу. На колесе закреплены три λ-образные группы так, что меньший стержень одной из них является диагональю параллелограмма, построенного на малых стержнях как на сторонах двух других λ-образных групп, соответствующих складываемым синусоидам. Обеспечиваются сложение графиков гармонических колебаний, повышение точности воспроизведения, удобство при использовании, снижение времени переналадки при наименьшем количестве звеньев. 2 ил.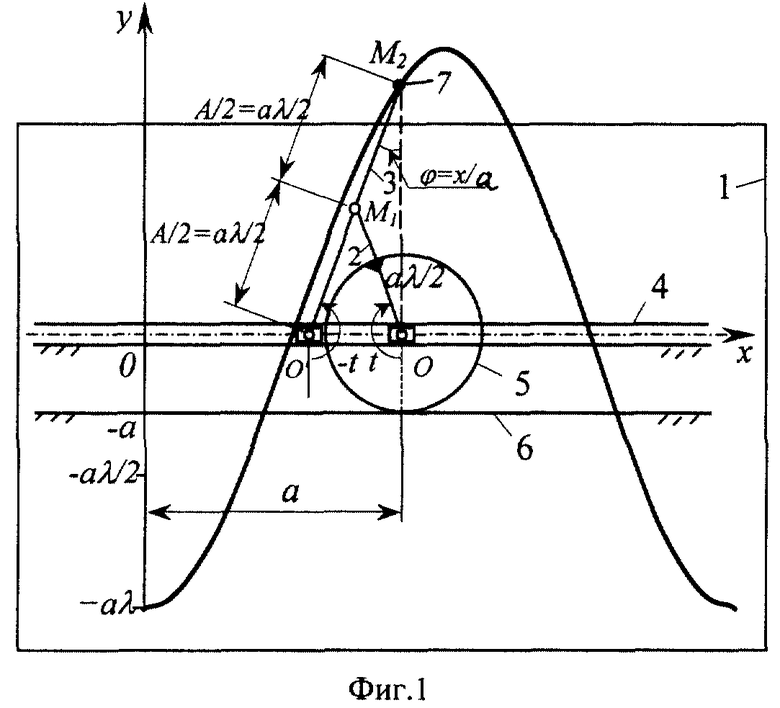
Устройство для воспроизведения и сложения синусоидальных траекторий общего вида, содержащее платформу, направляющую, колесо, рейку, которая размещена на платформе параллельно направляющей и соединена с колесом постоянно с возможностью его качения по ней без проскальзывания, при этом устройство содержит стержни, различающиеся по длине в два раза, причем больший стержень выполнен с держателем на одном конце, а меньший стержень одним из своих концов шарнирно соединен с серединой большего, колесо жестко связано с меньшим стержнем таким образом, что конец стержня, скользящий по направляющей, размещен в центре колеса, а больший стержень другим концом установлен на направляющей с возможностью перемещения вдоль нее так, что стержни при этом образуют λ-образную группу, причем на колесе закреплены три λ-образные группы таким образом, что меньший стержень одной из них является диагональю параллелограмма, построенного на малых стержнях, как на сторонах двух других λ-образных групп, соответствующих складываемым синусоидам.
| Устройство для регулирования частоты статического преобразователя многодвигательного асинхронного тягового электропривода | 1979 |
|
SU875571A1 |
| Прибор для вычерчивания синусоид | 1976 |
|
SU590161A1 |
| СТАНОК ДЛЯ ОБКАТКИ ТРУБЧАТЫХ ЗАГОТОВОК | 0 |
|
SU257421A1 |
| US 3422538 A, 21.01.1969. | |||

