Изобретение относится к орбитальным электромеханическим системам (ОС), т. е. многофункциональным, многороторным, многокоординатным электромеханическим преобразователям, имеющим общую магнитную систему, преимущественно цилиндрического типа, и ряд роторов, оси которых разнесены по образующим замкнутой цилиндрической поверхности (орбите), при этом роторы имеют возможность совершать как минимум два движения: вращение вокруг собственной оси и орбитальное перемещение по круговой траектории относительно общего центра. Данные орбитальные электромеханические системы применяются для электроприводов промышленных роботов, поскольку позволяют уменьшить массу и габариты подвижной части (платформы) манипулятора.
Известна орбитальная электромеханическая система промышленных роботов, имеющая модульный торцевой цилиндрический индуктор (статор), внутри статора расположены диски роторов приводных двигателей [1]. Недостатком такой системы является увеличенный размер воздушного зазора. Это обусловлено наличием кривизны у цилиндрического статора, которая, естественно, не совпадает с плоскостью роторов. Кроме этого, недостатком является наличие только одного статора, что приводит к необходимости установки замыкающих магнитопроводов на вращающейся платформе.
Наиболее близким к заявляемому по совокупности существенных признаков является орбитальная электромеханическая система промышленного робота, которая содержит две магнитные системы - внутреннюю и внешнюю, каждая из которых представляет собой С-образный магнитопровод [2].
Недостатком данной системы является ее приспособленность лишь к электроприводам постоянного тока, к тому же только двухполюсного исполнения (по числу индукторов). В приводах торцевого типа С-образные магнитопроводы не применяются, поскольку замыкание магнитного потока осуществляется в пределах окружности торцевого статора, а ферромагнитные массы имеются на роторе. Применение же нескольких кольцеобразных статоров приводит к тому, что лобовые части их занимают полезное пространство зоны возбуждения роторов, что приводит к уменьшению вращающегося момента.
Изобретение направлено на увеличение вращающегося момента при одновременном применении нескольких кольцеобразных статоров.
Это достигается тем, что роторы выполнены в виде плоских цилиндров, каждый из которых снабжен тремя короткозамкнутыми обмотками, причем первая и вторая короткозамкнутая обмотка расположены на верхней и нижней плоскостях каждого плоского цилиндра, а третья - по его образующим, а каждая пара статоров расположена в зоне одной из трех короткозамкнутых обмоток.
Достижение технического результата - повышение эффективности, увеличение момента вращения - достигается за счет увеличения числа активных зон. Так, у асинхронных двигателей традиционного исполнения имеется лишь одна активная зона. В данном же случае, помимо появления второй активной зоны на второй плоскости плоского цилиндра, имеются еще две активные зоны - у внутреннего и внешнего статоров, взаимодействующих с участками короткозамкнутых обмоток, расположенных по образующим плоского цилиндра.
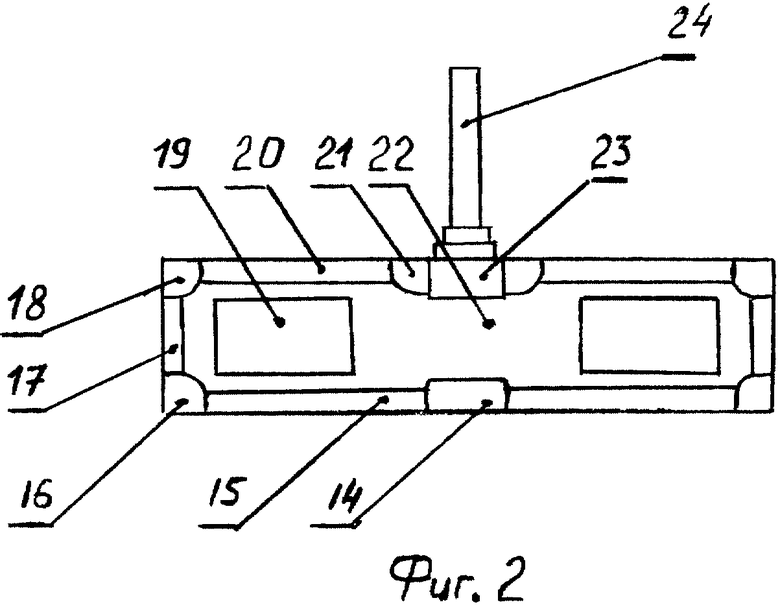
Сущность изобретения иллюстрируется чертежом, где на фиг.1 изображен разрез в вертикально-диаметральной плоскости системы орбитальной электромеханической промышленного робота, на фиг.2 показан диск ротора данной системы, разрез в вертикально-диаметральной плоскости.
Система орбитальная электромеханическая установлена на основании 1, на основании установлен цилиндрический кронштейн 2 в разрезе Г-образной формы. На его вертикальной стенке укреплен статор 3, а на основании 1 укреплены статоры 4 и 7. На горизонтальной полке кронштейна 2 закреплен статор 5. Система снабжена роторами 6. Имеется также кронштейн 10, симметричный относительно кронштейна 2, т.е. горизонтальная полка кронштейна 10 направлена в сторону горизонтальной полки кронштейна 2, а сам кронштейн 10, так же как и кронштейн 2, установлен на основании 1. На горизонтальной полке кронштейна 10 установлен статор 8, а на вертикальной стенке кронштейна 10 - статор 9. Роторы закреплены на вращающемся основании 11 в подшипниках 12, роторы соединены валом с редукторами 13, которые, в свою очередь, своими выходными валами приводят во вращение степени подвижности промышленного робота.
Рассмотрим подробнее конструкцию роторов (см.фиг.2). Ротор имеет три короткозамкнутые обмотки. Первая обмотка расположена на нижней плоскости плоского цилиндра, имеет внутренние лобовые части 14, стержни 15 и внешние лобовые части 16. Вторая обмотка расположена на верхней плоскости плоского цилиндра и имеет внешние лобовые части 18, стержни 20 и внутренние лобовые части 21. Третья обмотка расположена по образующим плоского цилиндра, имеет нижние лобовые части 16, общие с лобовыми частями первой обмотки, стержни 17, расположенные по образующим плоского цилиндра, и верхние лобовые части 18, общие с лобовыми частями второй обмотки. Тело ротора снабжено полостями 19, которые служат для уменьшения момента инерции ротора. Само тело ротора 22 выполнено, как обычно, шихтованным из листов электротехнической стали, листы имеют центральное отверстие, в которое запрессован вал 23 с выходным концом 24.
Устройство работает следующим образом. Совокупность статоров 3, 4, 5, 7, 8, 9 образует шесть зон взаимодействия с ротором 6: две нижние в активной зоне статоров 4 и 7, две верхние в зоне статоров 5 и 8 и две боковые в зоне статоров 3 и 9. Статоры 3 и 9 выполнены обычного цилиндрического типа с секционированными обмотками. Статоры 4, 5 ,7, 8, кроме того, имеют секционирование в виде сегментарного деления магнитной системы. Рассмотрим возможные режимы движения ротора.
1. Собственное вращение роторов. При заторможенном основании 11 вращение роторов 6 обеспечивается, например, направлением поля в статорах 3, 4, 5 - от чертежа наружу - фиг.1, а направление полей статоров 7, 8, 9 - к чертежу - см. фиг.1, при вращении основания 11 направление перемещения полей то же, но у статоров 4, 5, 7 и 8 задействуются лишь те сегменты, которые расположены в зоне нахождения роторов 6. Определение этих зон обусловлено работой датчика положения, соединенного с платформой 11 и входящего в состав штатной системы управления роботом. При реверсе направления перемещения полей меняются на противоположные.
2. Вращение "составного" ротора (привода поворота). Возможно использование совокупности роторов 6, находящихся в заторможенном состоянии, посредством действия тормозов, входящих в состав приводов степеней подвижности в качестве "составного" ротора без редукторного привода поворота платформы 11. В этом случае направления перемещения полей групп статоров 3, 4, 5 и 7, 8, 9 одинаковое. Например, если направление поля от чертежа - см. фиг.1 - во всех статорах, то направление перемещения платформы 11 против часовой стрелки, если смотреть сверху фиг.1. Если изменить направление всех полей на противоположное, то платформа 11 будет вращаться по часовой стрелке.
И в том и в другом случае момент вращения будет формироваться в шести подзонах всех шести статоров, которые объединены в три основные активные зоны:
- статоры 4 и 7, взаимодействующие со стержнями 15 (см. фиг.2) нижней короткозамкнутой обмотки роторов 6,
- статоры 5 и 8, взаимодействующие со стержнями 20 верхней короткозамкнутой обмотки роторов 6,
- статоры 3 и 9, взаимодействующие со стержнями 17 боковой короткозамкнутой обмотки роторов 6.
Введение описанного расположения статоров и короткозамкнутых обмоток роторов дает возможность улучшить массогабаритные показатели привода за счет увеличения числа активных зон и увеличения тем самым активного момента при любом режиме работы. При этом наблюдается хорошее использование магнитной системы статоров, поскольку лобовые части обмоток вертикальных и горизонтальных статоров не перекрывают друг друга.
Источники информации
1. А.с. СССР 1459921 (А.М.Литвиненко. Промышленный робот, опубл. БИ 7, 1989, В 25 J 11/00, з-ка 4224478/31-08 от 08.04.87).
2. А.с. СССР 1465305 (А.Л.Литвиненко. Промышленный робот, опубл. БИ 10, 1989, В 25 J 11/00, з-ка 4198381/31-08 от 24.02.87).
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОМЕХАНИЧЕСКАЯ ОРБИТАЛЬНАЯ СИСТЕМА ТОРЦЕВОГО ТИПА | 2001 |
|
RU2184029C1 |
| СИСТЕМА ОРБИТАЛЬНАЯ ЭЛЕКТРОМЕХАНИЧЕСКАЯ ТОРЦЕВОГО ТИПА | 2001 |
|
RU2190518C1 |
| ОРБИТАЛЬНАЯ ЭЛЕКТРОМЕХАНИЧЕСКАЯ СИСТЕМА ПРОМЫШЛЕННОГО РОБОТА | 2001 |
|
RU2184028C1 |
| ОРБИТАЛЬНАЯ ЭЛЕКТРОМЕХАНИЧЕСКАЯ СИСТЕМА | 2001 |
|
RU2206954C2 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ЧЕРВЯЧНЫЙ ПРИВОД | 2001 |
|
RU2204068C2 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ВИНТОВОЙ ПРИВОД | 2001 |
|
RU2190791C1 |
| ОРБИТАЛЬНЫЙ ШАГОВЫЙ МОТОР-РЕДУКТОР | 2001 |
|
RU2215358C2 |
| ОРБИТАЛЬНЫЙ МОТОР-РЕДУКТОР | 2001 |
|
RU2217856C2 |
| ПРОМЫШЛЕННЫЙ РОБОТ | 2001 |
|
RU2184030C1 |
| ВОЛНОВОЙ ОРБИТАЛЬНЫЙ ПРИВОД | 2001 |
|
RU2213894C2 |
Изобретение относится к орбитальным электромеханическим системам. Система содержит цилиндрические и торцевые статоры и роторы, установленные на вращаемом основании. Роторы выполнены в виде плоских цилиндров, каждый из которых снабжен тремя короткозамкнутыми обмотками. Первая и вторая короткозамкнутые обмотки расположены на нижней и верхней плоскостях каждого плоского цилиндра, а третья - по его образующим. Каждая пара статоров расположена в зоне одной из трех короткозамкнутых обмоток. Изобретение позволяет улучшить массогабаритные показатели привода за счет увеличения числа активных зон и увеличения тем самым активного момента при любом режиме работы. 2 ил.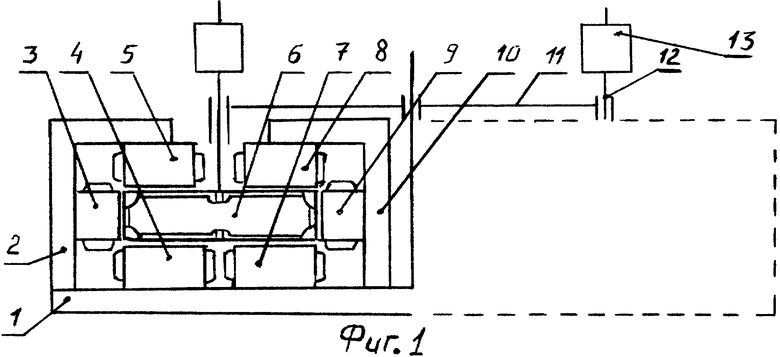
Система орбитальная электромеханическая промышленного робота, содержащая цилиндрические и торцевые статоры и роторы, установленные на вращаемом основании, отличающаяся тем, что роторы выполнены в виде плоских цилиндров, каждый из которых снабжен тремя короткозамкнутыми обмотками, причем первая и вторая короткозамкнутые обмотки расположены на нижней и верхней плоскостях каждого плоского цилиндра, а третья - по его образующим, а каждая пара статоров расположена в зоне одной из трех короткозамкнутых обмоток.
| Промышленный робот | 1987 |
|
SU1465305A1 |
| Промышленный робот | 1987 |
|
SU1459921A1 |
| ОРБИТАЛЬНЫЙ МОТОР-РЕДУКТОР | 1994 |
|
RU2071631C1 |
| US 4067998, 26.08.1986. | |||
