Заявляемое изобретение относится к устройствам для воспроизведения трансцендентных кривых циклоидального типа, в частности к устройствам для воспроизведения синусоиды, а также к устройствам, выполняющим математические операции, в данном случае - сложение синусоидальных функций.
Известно устройство [1] для воспроизведения и сложения синусоидальных траекторий общего вида, содержащее платформу, направляющую, колесо, рейку, которая размещена на платформе параллельно направляющей и соединена с колесом постоянно с возможностью его качения по ней без проскальзывания, при этом устройство содержит стержни, различающиеся по длине в два раза, причем больший стержень выполнен с держателем на одном конце, а меньший стержень одним из своих концов шарнирно соединен с серединой большего, а колесо жестко связано с меньшим стержнем таким образом, что конец стержня, скользящий по направляющей, размещен в центре колеса, а больший стержень другим концом установлен на направляющей с возможностью перемещения вдоль нее так, что стержни при этом образуют λ-образную группу, причем на колесе закреплены три λ-образные группы таким образом, что меньший стержень одной из них является диагональю параллелограмма, построенного на малых стержнях двух других λ-образных групп как на сторонах, соответствующих складываемым синусоидам.
Это устройство реализует воспроизведение и сложение синусоид лишь с фиксированными значениями параметров, переналадка на новые параметры требует серьезных конструктивных мер и больших затрат времени.
Заявляемое изобретение предназначено для расширения арсенала наиболее простых, удобных, точных и быстро переналаживаемых (гибких) устройств для воспроизведения синусоидальных траекторий определенной точкой специально движущегося звена механизма при наименьшем количестве звеньев, а также для получения возможности складывать синусоидальные траектории с широким диапазоном параметров и быстрой переналадке при их изменении.
Вышеуказанная задача решается тем, что в известном устройстве для воспроизведения и сложения синусоидальных траекторий общего вида, содержащем платформу, направляющую, колесо, рейку, которая размещена на платформе параллельно направляющей и соединена с колесом постоянно с возможностью его качения по ней без проскальзывания, при этом устройство содержит стержни, различающиеся по длине в два раза, причем больший стержень выполнен с держателем на одном конце, а меньший стержень одним из своих концов шарнирно соединен с серединой большего, а колесо жестко связано с меньшим стержнем таким образом, что конец стержня, скользящий по направляющей, размещен в центре колеса, а больший стержень другим концом установлен на направляющей с возможностью перемещения вдоль нее так, что стержни при этом образуют λ-образную группу, причем на колесе закреплены три λ-образные группы таким образом, что меньший стержень одной из них является диагональю параллелограмма, построенного на малых стержнях как на сторонах двух других λ-образных групп, соответствующих складываемым синусоидам, согласно изобретению оно содержит на колесе направляющий паз и фиксирующие винты, которыми каждый из меньших стержней жестко скрепляется с колесом с возможностью изменения углового положения этих стержней по отношению к колесу и к друг другу.
Постоянный контакт рейки и колеса и отсутствие проскальзывания при качении по рейке колеса, жестко связанного с малыми стержнями, для обеспечения надежного замыкания кинематической цепи может обеспечиваться, в частности, за счет фрикционного соединения или за счет выполнения рейки и колеса зубчатыми при поджатии их друг к другу с помощью пружин или с использованием сил тяжести при специальном расположении механизма по отношению к вертикали, или каким-либо другим способом. Отличительной особенностью этого механизма является, в частности, возможность быстро изменять параметры воспроизводимых и складываемых синусоид.
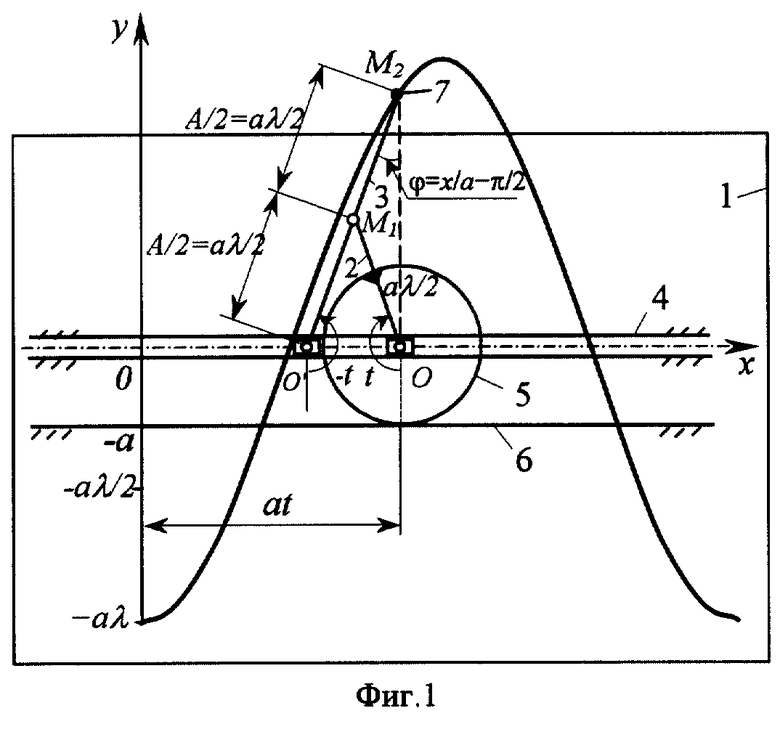
Получаемый при осуществлении изобретения технический результат, а именно сложение гармонических колебаний с широким диапазоном параметров, снижение времени переналадки на другие параметры синусоидальных траекторий, достижение удобства при использовании, расширение диапазона размеров воспроизводимых синусоид, достигается за счет того, что катящееся без скольжения колесо жестко связано с каждым из меньших стержней с возможностью изменения углового положения этих стержней по отношению к колесу и к друг другу. Такое соединение обеспечивается, как показано на фиг.1, 2, с помощью фиксирующих винтов, расположенных на стержнях и проходящих через дугообразную прорезь-паз на колесе.
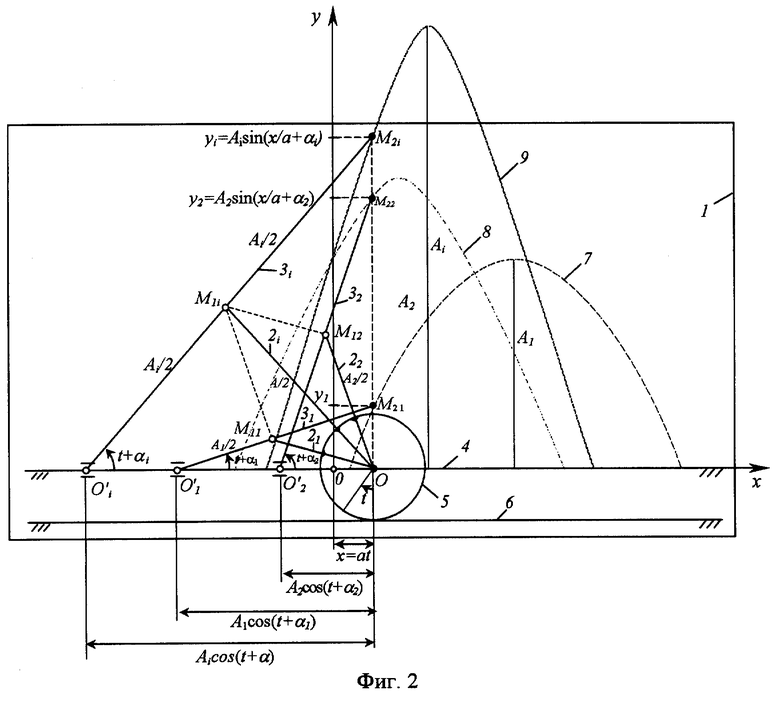
На фиг.1 изображена кинематическая схема фрагмента устройства, поясняющая принцип воспроизведения отдельной синусоиды, на фиг.2 - кинематическая схема предлагаемого устройства в целом.
Оно состоит из платформы 1 (фиг.2), стержней 21, 22, 2i, 31, 32, 3i, направляющей 4, колеса 5 и рейки 6, размещенных на платформе 1, причем рейка 6 параллельна направляющей 4. Колесо 5, жестко соединенное со стержнями 21, 22 и 2i винтами постоянно соединено с рейкой 6 при возможности катиться по ней без скольжения. Оканчивающиеся штифтом О концы стержней 21, 22, 2i расположены в центре колеса 5 с возможностью скользить по направляющей 4. Стержни 21, 22, 2i другими своими концами М11, М12, М1i шарнирно соединены с серединой соответственно стержней 31, 32, 3i которые оканчиваются соответственно штифтами O'1, O'2, O'i, способными скользить по направляющей 4. Другие концы М21, М22, М2i стержней 31, 32, 3i указывают точки на воспроизводимых синусоидах и оканчиваются держателями (на фиг.2 их положения совпадают с точками М21, М22, M2i), которые при необходимости могут нести пишущий узел или инструмент для разметки, обработки, сварки или перемещаемую деталь, или любой иной удерживаемый, перемещаемый объект. При указанном расположении малого стержня третьей λ-образной группы конец М2i большего стержня этой группы будет описывать синусоидальную траекторию 9, являющуюся суммой двух других синусоид 7, 8, описываемых концами М21, М22 больших стержней первых двух λ-образных групп. На колесе 5 выполнен направляющий паз 10, а на меньших стержнях 21, 22, 2i расположены проходящие через паз фиксирующие винты 11.
Конструктивные размеры при этом удовлетворяют следующим соотношениям для каждой λ-образной группы стержней
O'1M21=2O'1M11=2M11M21=2OM11=aλ1,
O'2M22=2O'2M12=2M12M22=2OM12=aλ2,
O'iM2i=2O'iM1i=2M1iM2i=2OM1i=aλi,
где а - радиус колеса, определяющий период Т=2аπ всех синусоид; О'1M21=A1=aλ1, О'2M22=A2=aλ2, О'iM2i=Ai=aλi - длины соответствующих больших стержней, определяющих амплитуды A1=aλ1, A2=aλ2, Ai=aλi синусоид, λ1=O'1M21/a, λ2=O'2M22/a, λi=O'iM2i/a - отношения длин больших стержней к радиусу колеса, которые могут меняться в зависимости от требуемых параметров соответствующей воспроизводимой синусоиды; эти отношения равны произведению амплитуд на круговую (угловую) частоту 2π/Т=1/a синусоид.
Устройство работает следующим образом. При качении колеса 5 по рейке 6 точка контакта, центр О колеса и абсциссы концов М21, М22, М2i стержней 31, 32, 3i, перемещаются вдоль рейки 6 по горизонтали на некоторое расстояние xO, для определенности, например, вправо. При этом колесо 5 вместе со стержнями 21, 22, 2i повернется на угол t по ходу стрелки часов, а стержни 31, 32, 3i - на тот же угол против хода стрелки часов. В силу качения без скольжения между горизонтальным перемещением xO и углом t поворота будет иметь место линейное соотношение
xO=at.
Тогда концы М21, М22, М2i стержней 31, 32, 3i будут описывать свои соответствующие синусоиды. Действительно, из фиг.1 и 2 видно, что абсциссы этих точек совпадают друг с другом и с точкой О, и мы будем иметь:
xO=xM21=xM22=xM2i=at
Для ординат этих точек M21, M22, М2i получим
yM21=aλ1sin(t+α1)=aλ1sin(xM21/a+α1)
yM22=aλ2sin(t+α2)=aλ2sin(xM22/a+α2)
yM2i=aλisin(t+αi)=aλisin(xM2i/a+αi)
Это есть синусоиды с амплитудами аλ1, аλ2, аλi, периодом 2аπ и фазами α1, α2, αi.
Из математических преобразований известно [2, стр.97-100], [3, стр.110-111], что результатом сложения двух синусоид одного периода (двух гармонических колебаний одной частоты) с заданными фазами α1, α2 и амплитудами A1, А2

является тоже синусоида с тем же периодом Т=2π/ω и с определенными фазой αi и амплитудой Аi
Причем для амплитуды Аi и фазы αi имеем



Каждая из синусоид y1=A1sin(ωt+α1), y2=A2sin(ωt+α2) реализуется данным механизмом (см. фиг.2), при этом следует считать ω=1/a. Это для ясности показано также для отдельной синусоиды на отдельном рисунке (фиг.1). Очевидно, что в данном устройстве, изображенном на рисунке (фиг.2), результирующая синусоида также реализуется, что достигается таким расположением точки-конца М1i малого стержня, при котором точка М1i находится в вершине параллелограмма, построенного на двух стержнях длины А1/2, A2/2 и, следовательно, в соответствии с теоремой косинусов выполняются соотношения (3), а также (4). Таким образом, данное расположение определяет в соответствии с (3) необходимый размер стержня 3i при сохранении указанного отношения 2:1 между его длиной и длиной стержня 2i.
Каждая из фаз α1 или α2 определяется исходным расположением стержней относительно колеса и относительно друг друга, устанавливаемом при помощи фиксирующих винтов 11. Одна из фаз может задаваться произвольно углом между соответствующим стрежнем и направляющей 4 в исходном положении колеса, другая будет находиться из условия равенства разности α2-α1 углу между стержнями 22, 21, который задается и может быть легко изменен с помощью фиксирующих винтов. Тогда фаза α1 определится из соотношений (4)-(5).
Для быстрой переналадки и изменения таких параметров воспроизводимых кривых-синусоид, как фаза, достаточно ослабить фиксирующие винты и повернуть стержни относительно колеса и относительно друг друга на нужный угол в соответствии с соотношениями (4)-(5), затем снова затянуть винты, фиксируя стрежни на колесе.
Источники, принятые во внимание
1. Крутов А.В. Патент №2182081 RU на изобретение "Устройство для воспроизведения и сложения синусоидальных траекторий" по заявке №2001112467/12 от 11.05.2001 г. Опубл. 10.05.2002. Бюл. №13.
2. Справочник машиностроителя. В шести томах. T.1. (Математика. Теоретическая механика. Теория механизмов и машин). - М.: МАШГИЗ, 1960. - 592 с.
3. Яворский Б.М., Детлаф А.А. Справочник по физике для инженеров и студентов вузов. М.: Наука, 1968. - 940 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ВОСПРОИЗВЕДЕНИЯ И СЛОЖЕНИЯ СИНУСОИДАЛЬНЫХ ТРАЕКТОРИЙ | 2001 |
|
RU2182081C1 |
| УСТРОЙСТВО ДЛЯ ВОСПРОИЗВЕДЕНИЯ СИНУСОИДЫ ОБЩЕГО ВИДА | 2000 |
|
RU2175610C2 |
| МЕХАНИЗМ ДЛЯ ТОЧНОГО ВОСПРОИЗВЕДЕНИЯ СИНУСОИДЫ | 2000 |
|
RU2174917C2 |
| УСТРОЙСТВО ДЛЯ ВОСПРОИЗВЕДЕНИЯ КРИВЫХ И ТРАЕКТОРИЙ ПРОГРАММНОГО ДВИЖЕНИЯ | 2002 |
|
RU2212342C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ СОДЕРЖАНИЯ БИЛИРУБИНА В ПОДКОЖНЫХ ТКАНЯХ И КРОВИ ПАЦИЕНТОВ | 1992 |
|
RU2038037C1 |
| АВАРИЙНО-СПАСАТЕЛЬНОЕ ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ ЕГО СБОРКИ | 2022 |
|
RU2824051C2 |
| УПРАВЛЯЕМОЕ ПОВОРОТНОЕ УСТРОЙСТВО | 2002 |
|
RU2228712C2 |
| ПОРТАТИВНЫЙ СТАНОК | 1993 |
|
RU2041803C1 |
| ЗАЖИМ ДЛЯ КРЕПЛЕНИЯ ПРЕДМЕТА | 2001 |
|
RU2208719C2 |
| ПРИСПОСОБЛЕНИЕ ДЛЯ ЗАТОЧКИ СПИРАЛЬНЫХ СВЕРЛ | 2004 |
|
RU2271271C1 |
Изобретение относится к устройствам для воспроизведения трансцендентных кривых циклоидального типа, в частности к устройствам для воспроизведения синусоиды, а также к устройствам, выполняющим математические операции. Техническим результатом являются достижения возможности сложения графиков синусоидальных траекторий и получения результирующей синусоидальной траектории, а также расширение арсенала средств для воспроизведения синусоидальных траекторий. Технический результат достигается за счет того, что устройство содержит платформу, направляющую, колесо, рейку, стержни, различающиеся по длине в два раза и образующие λ-образную группу, при этом колесо направляющей имеет паз и фиксирующие винты, которыми каждый из меньших стержней жестко скрепляется с колесом с возможностью изменения углового положения этих стержней по отношению к колесу и к друг другу. 2 ил.
Устройство для воспроизведения и сложения кривых и траекторий программного движения синусоидального типа, содержащее платформу, направляющую, колесо, рейку, которая размещена на платформе параллельно направляющей и соединена с колесом постоянно с возможностью его качения по ней без проскальзывания, при этом устройство содержит стержни, различающиеся по длине в два раза, причем больший стержень выполнен с держателем на одном конце, а меньший стержень одним из своих концов шарнирно соединен с серединой большего, а колесо жестко связано с меньшим стержнем таким образом, что конец стержня, скользящий по направляющей, размещен в центре колеса, а больший стержень другим концом установлен на направляющей с возможностью перемещения вдоль нее так, что стержни при этом образуют λ-образную группу, причем на колесе закреплены три λ-образные группы таким образом, что меньший стержень одной из них является диагональю параллелограмма, построенного на малых стержнях двух других λ-образных групп как на сторонах, соответствующих складываемым синусоидам, отличающееся тем, что оно содержит на колесе направляющей паз и фиксирующие винты, которыми каждый из меньших стержней жестко скрепляется с колесом с возможностью изменения углового положения этих стержней по отношению к колесу и к друг другу.
| УСТРОЙСТВО ДЛЯ ВОСПРОИЗВЕДЕНИЯ И СЛОЖЕНИЯ СИНУСОИДАЛЬНЫХ ТРАЕКТОРИЙ | 2001 |
|
RU2182081C1 |
| УСТРОЙСТВО ДЛЯ ВОСПРОИЗВЕДЕНИЯ СИНУСОИДЫ ОБЩЕГО ВИДА | 2000 |
|
RU2175610C2 |
| Прибор для вычерчивания синусоид | 1976 |
|
SU590161A1 |
| US 3422538 А, 21.01.1969. | |||

