Изобретение относится к конструкциям электромеханических приводов, используемых в системах управления регулирующего оборудования энергетических машин.
Из уровня техники известны различные конструкции электромеханических приводов поступательного действия.
Известна конструкция электромеханического привода запорного клапана в соответствии с патентом РФ на полезную модель № 119056, МПК F16K 31/05, опубл. 18.02.2012.
В соответствии с независимым пунктом формулы патента заявлен электромеханический привод запорного клапана, содержащий корпус, электродвигатель, вал которого соединен с рабочим элементом, выполненным с возможностью соединения с вертикально перемещаемым штоком запорного клапана, отличающийся тем, что внутри корпуса размещены электродвигатель, электронный блок управления, электрически соединенный с моментным выключателем и выключателями концевых положений затвора арматуры клапана, зубчатая цилиндрическая передача, муфта ограничения крутящего момента, ходовой винт, при этом вал электродвигателя соединен с ведущей шестерней цилиндрической передачи, ведомая шестерня которой через муфту ограничения крутящего момента соединена с ходовым винтом, муфта ограничения крутящего момента содержит подпружиненную поводковую муфту, выполненную с возможностью взаимодействия с моментным выключателем, а ходовой винт соединен с выключателями концевых положений затвора арматуры клапана.
При этом известная конструкция электромеханического привода обладает следующими недостатками:
1) В конструкции применена винтовая передача скольжения, содержащая ходовой винт, соединенный посредством винтового соединения с тягой, выполненной с возможностью соединения со штоком запорного клапана. При этом винтовая передача скольжения характеризуется низким КПД, низким ресурсом, и, как следствие, быстрым износом механизма передачи. Кроме того, данная конструкция обладает низкой скоростью перемещения штока запорного клапана.
2) В данной конструкции применена одноступенчатая зубчатая цилиндрическая передача, при этом, в случае необходимости изготовления электромеханического привода, предназначенного для передачи больших нагрузок, требуется применение зубчатых колес большого размера, обеспечивающих большой момент инерции элементов вращения.
3) В известной конструкции применена муфта ограничения крутящего момента при срабатывании которой нарушается кинематическая связь электродвигателя и ходового винта. В результате этого возможна потеря позиционирования штока.
Также известна конструкция электромеханического привода в соответствии с патентом РФ на полезную модель № 200160, МПК F16H 25/22, F16H 57/04, опубл. 08.10.2020.
Известная конструкция содержит корпус с высокомоментным сервомотором на валу, редуктор, соосно связанный с линейной частью электромеханического привода, при этом привод содержит встроенный блок охлаждения, состоящий из тепловых трубок, отводящих тепловую мощность от высокомоментного сервомотора на радиатор охлаждения.
Достоинством известной конструкции является применение редуктора, соосно связанного с линейной частью электромеханического привода, кинематически связанного с высокомоментным сервомотором.
Однако известная конструкция электромеханического привода обладает следующими недостатками:
1) При работе электромеханического привода под нагрузкой значительно увеличивается температура его элементов по причине выделяемого высокомоментным сервомотором тепла, что требует применения специальных систем охлаждения, что, в свою очередь, значительно снижает возможную область применения такого привода, зависимого от температуры окружающей среды.
2) В данной конструкции применена шариковая винтовая передача, которая обладает недостаточной нагрузочной способностью и меньшим КПД по сравнению в роликовинтовой планетарной передачей.
3) Известная конструкция является моноблочной, поэтому в случае неисправности любой части требуется замена всего привода. То есть отсутствует возможность модульной замены неисправных деталей.
Также известна конструкция электромеханического привода поступательного действия в соответствии с патентом РФ на изобретение № 2671662, МПК F16H 25/22, опубл. 06.11.2018.
В соответствии с формулой патента заявлен электромеханический привод поступательного действия, содержащий электродвигатель, редуктор с промежуточной передачей и винтовую передачу с винтом и сепаратором с телами качения, отличающийся тем, что входным звеном винтовой передачи является вращающийся винт, а выходным звеном - гайка, выполненная в форме поршня, состоящего из сепаратора с гнездами, в которых размещены тела качения, и корпуса с гладкой цилиндрической внутренней поверхностью, сепаратор и корпус расположены коаксиально и жестко соединены между собой по торцам сепаратора так, что тела качения, в процессе работы привода, постоянно контактируют с поверхностью профиля винта, внутренней поверхностью профиля гайки и поверхностями гнезд сепаратора, расположенных по винтовой линии с шагом, равным шагу винта, при этом в качестве тел качения используются шарики или ролики, выполненные с коническими торцевыми поверхностями и сферическими вершинами, причем конусность продольного профиля ролика соответствует конусности продольного профиля винтовой линии винта.
Достоинствами известной конструкции является применение промежуточного редуктора, что позволяет снизить момент инерции вращающихся элементов, уменьшить нагрузку на электродвигатель, а также уменьшить общие размеры привода.
Однако в известной конструкции электромеханического привода поступательного действия применена шариковая винтовая передача, обладающая недостаточной нагрузочной способностью и большими размерами по сравнению с роликовинтовой планетарной передачей.
Также известна конструкция линейного электромеханического привода c возможностью смазывания без демонтажа в соответствии с патентом РФ на изобретение № 2719493, МПК F16H 25/24, опубл. 20.04.2020.
В соответствии с независимым пунктом формулы изобретения заявлен линейный электромеханический привод, который содержит: корпус, электромотор, содержащий статор, закрепленный на внутренней поверхности корпуса, и ротор; роликовинтовую передачу, которая содержит цилиндр с внутренней резьбой, установленный с возможностью вращения в корпусе, винт, установленный в указанном цилиндре с возможностью поступательного перемещения и содержащий резьбовой участок, шток, соединенный с винтом без возможности взаимного перемещения и содержащий наружную часть и внутреннюю полую трубчатую часть, причем внутренняя полая трубчатая часть отделена от наружной части полостью, и резьбовые ролики, которые установлены в указанном цилиндре во взаимодействии с внутренней резьбой цилиндра и резьбовым участком винта с возможностью передачи усилия от указанного цилиндра к штоку, причем возможность вращения цилиндра роликовинтовой передачи обеспечена его установкой в корпусе по меньшей мере на одной подшипниковой опоре, а ротор электромотора содержит постоянные магниты, установленные на внешней поверхности цилиндра роликовинтовой передачи; отверстие для доступа смазки и канал для смазки, проходящий от отверстия для доступа смазки к внутреннему пространству указанного резьбового цилиндра роликовинтовой передачи, причем часть канала для смазки проходит во внутренней полой трубчатой части штока, при этом внутренняя полая трубчатая часть штока расположена относительно винта последовательно в продольном направлении.
Достоинствами известной конструкции являются: применение в приводе роликовинтовой передачи, кроме того, привод снабжён механизмом смазки нагруженных элементов, позволяющим продлить срок его службы.
Однако, поскольку элементы электромотора являются составной частью корпуса роликовинтовой передачи (статор электромотора закреплен на корпусе роликовинтовой передачи), а ротор электромотора размещен на гайке роликовинтовой передачи (ротор электромотора образован путем установки постоянных магнитов на внешний цилиндр роликовинтовой передачи), то это приводит к следующим последствиям:
1) Фактически отсутствует возможность ремонта механизма привода. То есть при выходе из строя электромотора или роликовинтовой передачи требуется полная замена всего привода.
2) Отсутствуют промежуточные редуктора и защитные механизмы между электромотором и роликовинтовой передачей, что требует использования мощных электромоторов.
3) Имеются повышенные требования к температурному режиму работы самого электромеханического привода и к температуре окружающей среды.
Также известна конструкция электрического приводного механизма для клапана, предназначенного для открытия/закрытия коксового барабана, описанная в патенте РФ на изобретение № 2608450, МПК F16K 31/44, опубл. 18.01.2017, которая была выбрана в качестве прототипа.
В соответствии с первым пунктом формулы патента электрический приводной элемент содержит корпус, выполненный с возможностью соединения с крышкой клапана для открытия/закрытия коксового барабана и с возможностью соединения с редуктором; главный резьбовой вал, расположенный внутри корпуса и прикрепленный к редуктору; планетарный компонент, содержащий корпусную часть, которая заключает в себе главный резьбовой вал, и вал, который проходит из корпусной части и также заключает в себе главный резьбовой вал, при этом вал выполнен с возможностью соединения с затвором клапана открытия/закрытия, при этом корпусная часть содержит резьбовые ролики, расположенные вокруг и контактирующие с главным резьбовым валом так, что когда главный резьбовой вал вращается, взаимодействие между резьбой главного резьбового вала и резьбой резьбовых роликов вызывает линейное перемещение планетарного компонента внутри корпуса и вызывает тем самым линейное передвижение затвора, редуктор, соединенный с приводным элементом, и соединенный с муфтой предельного момента, электродвигатель, установленный на корпусе приводного элемента, при этом электродвигатель соединен с редуктором через муфту предельного момента.
Достоинствами известной конструкции являются:
1) Применение роликовинтовой планетарной передачи (синоним: винтовой планетарной передачи с резьбовыми роликами). Такая конструкция обладает рядом преимуществ по сравнению с шариковинтовой передачей, главное из которых – наличие большого числа точек контакта (большая площадь контакта) и, как следствие, её высокая нагрузочная способность. Для роликовинтовых передач допускается статическая нагрузка в три раза больше, чем для шариковинтовых передач, при этом ресурс роликовинтовых передач выше в пятнадцать раз, по сравнению с шариковинтовыми передачами. Кроме того, такие передачи могут развивать скорость в два раза превышающую скорость шариковых передач, при этом ускорение может достигать 5g. Также возможно использование резьбы для ходового винта с меньшим шагом, чем для шариковоинтовой передачи. Большее число точек контакта роликовинтовой планетарной передачи придает большую жесткость передачи и большую стойкость к ударным нагрузкам.
2) Поскольку электродвигатель установлен на корпусе приводного элемента, это значительно упрощает обслуживание механизма привода.
3) Редуктор включает в себя устройство ручного управления в обход автоматики.
Однако известная конструкция электрического приводного механизма обладает следующими недостатками:
В электромеханическом приводе с винтовой передачей происходит преобразования вращательного движения в поступательное продольное перемещение штока, соединенного с рабочим органом (штоком клапана, заслонкой и пр.), при этом шток испытывает значительные осевые нагрузки, которые затем передаются на ходовой винт и далее на корпус электромеханического привода через редуктор, который включает в себя осевые упорные подшипники.
При этом в конструкции электромеханического привода отсутствует механизм компенсации осевых нагрузок, которые могут возникать при работе исполнительного устройства под высокими статическими и динамическими нагрузками.
Технической проблемой, решаемой с помощью заявляемого изобретения, является невозможность использования известных конструкций электромеханических приводов поступательного действия для работы под высокими статическими и динамическими нагрузками, например, в системах регулирования паровых турбин, имеющих усилие привода до 200 кН и обладающих высокой скоростью выполнения рабочего хода в диапазоне от 0,2 до 1,0 с.
Техническим результатом заявляемого изобретения является расширение сферы применения электромеханического привода поступательного действия, который может быть использован, в том числе для работы под высокими статическими и динамическими нагрузками, а также позволяющего заменить гидроприводы в системах регулирования паровых турбин.
К электромеханическому приводу поступательного действия, предназначенного для использования в исполнительных механизмах устройств управления, регулирующих режимы работы паровых турбин предъявляется ряд повышенных требований:
- Температура окружающей среды в нормальном режиме работы паровых турбин может достигать + 70 єC;
- Время срабатывания находится в диапазоне от 0,2 до 1,0 с;
- Высокое усилие срабатывания;
- Высокая точность позиционирования;
- Высокая надежность;
- Повышенный ресурс работы.
Указанный технический результат достигается за счёт заявляемой конструкции электромеханического привода поступательного действия, состоящего из серводвигателя, роликовинтовой планетарной передачи и двухступенчатого редуктора.
Двухступенчатый редуктор включает в себя корпус, в котором установлены шевронные колеса, с помощью которых передается крутящий момент от серводвигателя к роликовинтовой планетарной передаче, ручной дублер, позволяющий выполнять монтажно-наладочные работы и осуществлять перемещения штока привода в ручном режиме, а также автоматический лубрикатор, предназначенный для осуществления смазки шевронных колес консистентной смазкой в автоматическом режиме.
Роликовинтовая планетарная передача включает в себя корпус, в котором размещены ходовой винт, соединённый с шевронным колесом двухступенчатого редуктора и установленный в радиально-упорных подшипниках, размещённых в корпусе, а также шток, установленный в узле уплотнений, также размещённом в корпусе, при этом шток соединён с гайкой, на наружном диаметре которой установлена каретка с сухарями, предназначенными для предотвращения вращения гайки и которые имеют возможность перемещения по направляющим, выполненным внутри корпуса, причём внутри гайки установлены параллельно оси корпуса винтовые ролики, находящиеся в зацеплении как с гайкой, так и с ходовым винтом, при этом, винтовые ролики установлены между двух сепараторов, служащих для их позиционирования в гайке, вращение винтовых роликов синхронизировано с помощью коронной шестерни.
Для осуществления контроля нагрузки на шток, на нём также может быть установлен датчик силоизмерительный тензорезисторный, а для определения предельных положений каретки на корпусе роликовинтовой передачи могут быть установлены, по меньшей мере два датчика положения.
Таким образом, указанный технический результат достигается за счёт применения в конструкции электромеханического привода поступательного действия следующих технических решений:
1) Применена роликовинтовая планетарная передача, в которой осевая нагрузка передается на корпус от ходового винта через радиально упорные подшипники, которые установлены непосредственно на ходовом винте.
Такое решение позволяет:
- Снять осевые нагрузки с редуктора, через который передаётся крутящий момент с серводвигателя на ходовой винт;
- Повысить жесткость конструкции и исключить возможные поперечные перемещения ходового винта во время рабочего хода, что в свою очередь позволяет увеличить нагрузку на электромеханический привод поступательного действия.
2) Применена шевронная передача, достоинствами которой являются:
- Высокая плавность хода, которая достигается благодаря большому углу наклона зубьев;
- Уменьшены габариты по сравнению с косозубым колесом, что позволяет снизить размер и массу передачи и что приводит к снижению инерции передачи, а это положительно влияет на динамику работы всего электромеханического привода поступательного действия;
- Высокая надежность;
- Высокий КПД (97-98%).
Кроме того, шевронная передача также обладает и другими преимуществами:
- Практически отсутствует осевая нагрузка на подшипники, что позволяет значительно повысить ресурс редуктора;
- Возможно существенно увеличить плавность работы редуктора за счёт увеличения угла наклона зубьев и обеспечения одновременного зацепления нескольких зубьев шевронных колес, что в свою очередь, приводит к повышению ресурса работы редуктора, а также позволяет уменьшить его габаритные размеры.
- Уменьшенная масса редуктора позволяет снизить момент инерции механизма.
3) Применена автоматизированная система смазки, что позволяет повысить ресурс всех компонентов электромеханического привода поступательного действия.
4) Применен ручной дублер, что позволяет выполнять работу электромеханического привода в ручном режиме, в случае отказа серводвигателя, например, по причине отсутствия внешнего питания.
5) Применена параллельная компоновка серводвигателя и роликовинтовой планетарной передачи. Это позволяет решить сразу несколько задач:
- Габаритные размеры электромеханического привода поступательного действия позволяют его использовать в системах регулирования паровых турбин вместо гидравлических приводов;
- Возможно применение серводвигателей, имеющих габаритные размеры, сопоставимые с размерами роликовинтовой планетарной передачи, что позволяет применить более мощный серводвигатель в сочетании с соблюдением устойчивого теплового баланса механизма;
- Возникает возможность установить несколько серводвигателей, что позволяет осуществить многократное дублирование системы и повысить надежность её работы;
- Возможна оперативная замена элементов привода в случае выхода их из строя.
Заявленная конструкция электромеханического привода поступательного действия поясняется изображениями:
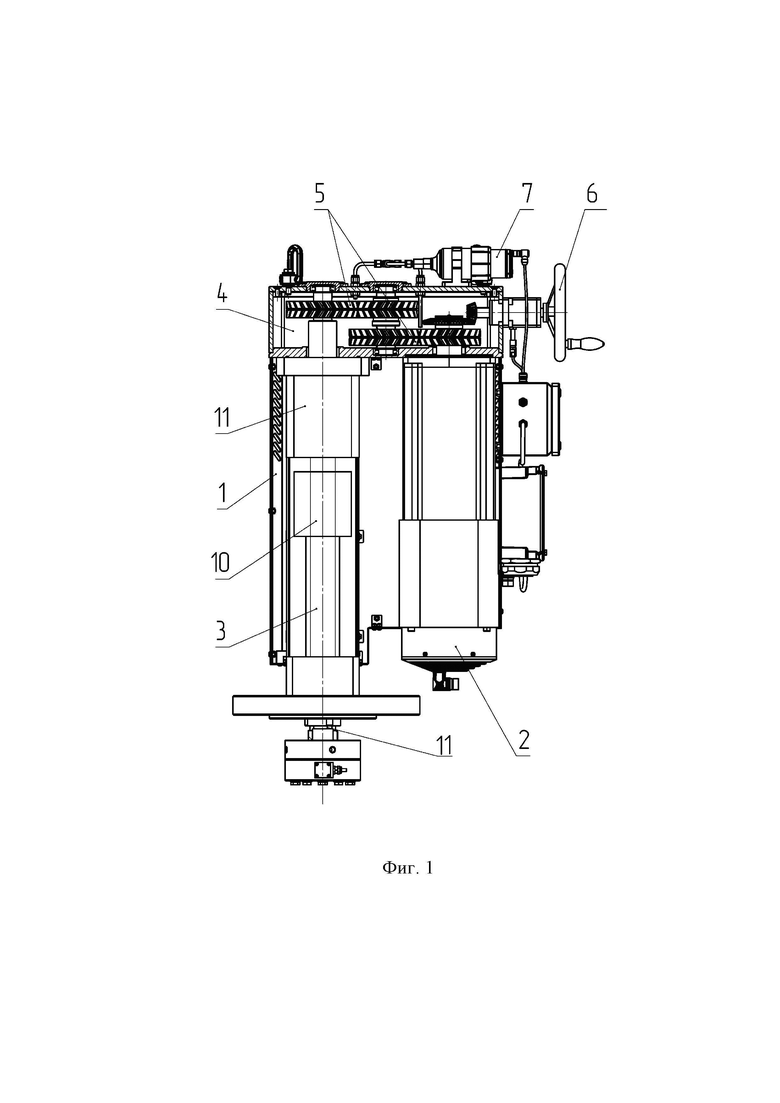
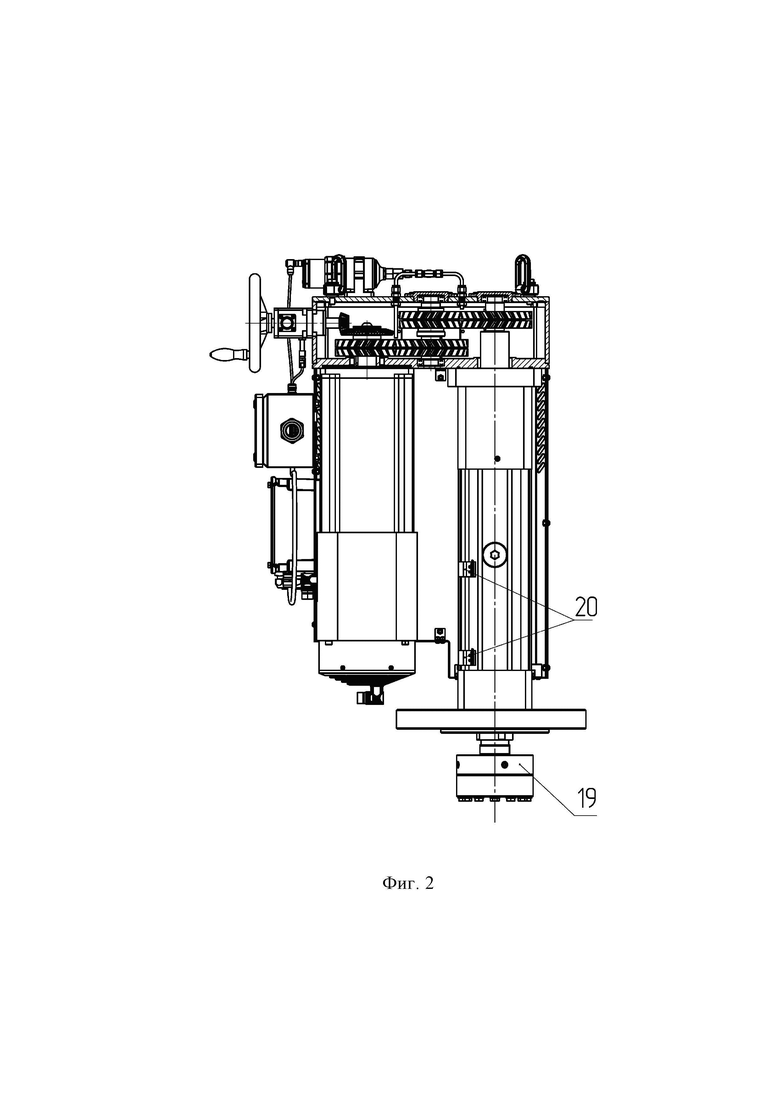
на Фиг. 1 и Фиг. 2 показана конструкция электромеханического привода – виды с двух сторон с частичным разрезом в части двухступенчатого редуктора;
на Фиг. 3 показан электромеханический привод в изометрической проекции;
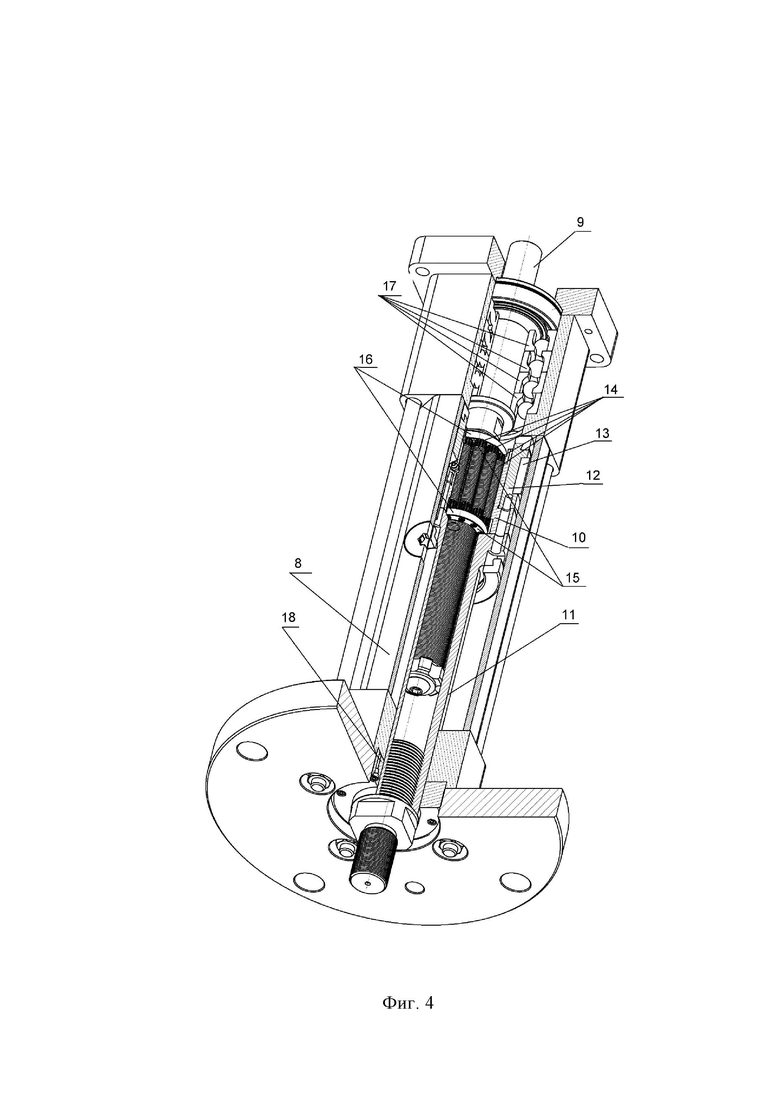
на Фиг. 4 показана роликовинтовая планетарная передача в разрезе;
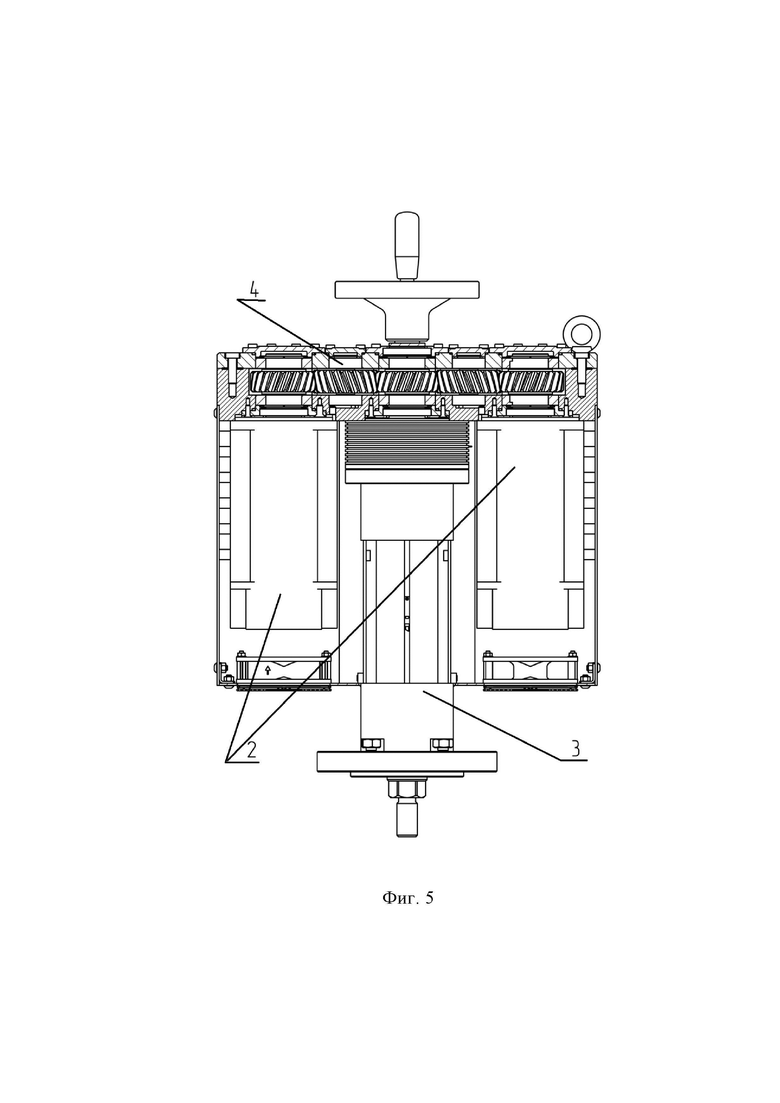
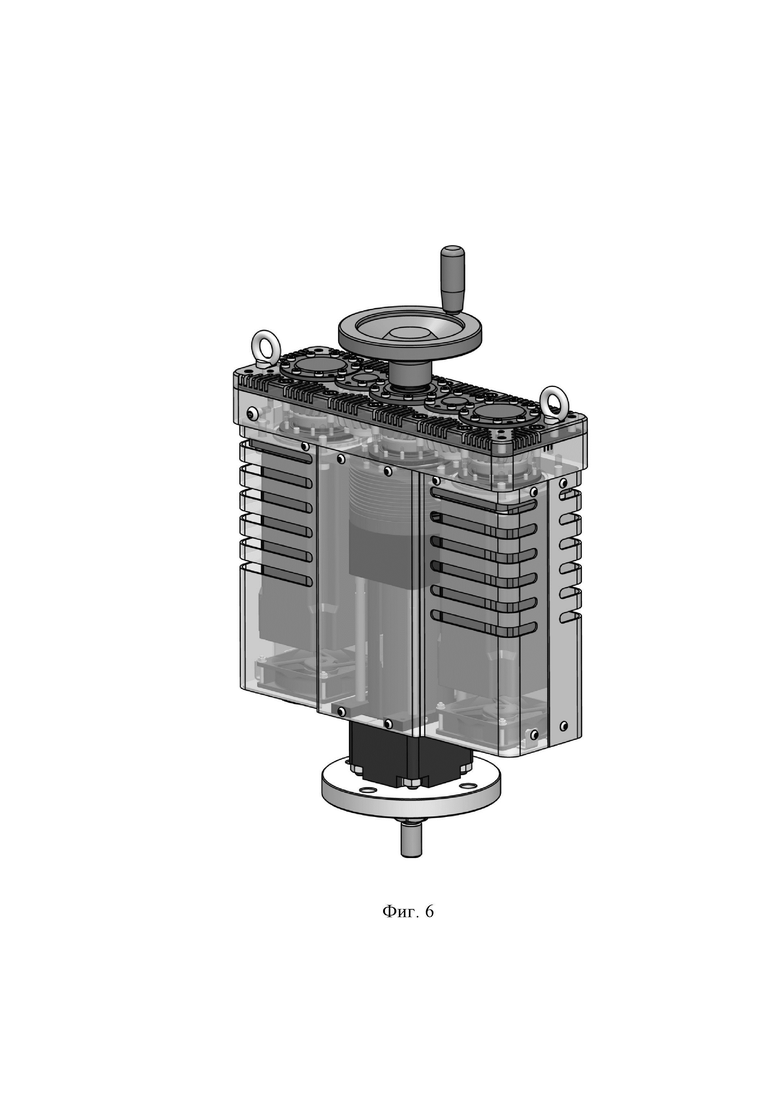
на Фиг. 5 показан вариант исполнения электромеханического привода с двумя серводвигателями с частичным разрезом в части двухступенчатого редуктора;
на Фиг. 6 показан вариант исполнения электромеханического привода с двумя серводвигателями в изометрической проекции.
На фигурах обозначены следующие позиции:
1 – электромеханический привод поступательного действия;
2 – серводвигатель;
3 – роликовинтовая планетарная передача;
4 – двухступенчатый редуктор;
5 – шевронные колеса;
6 – ручной дублер;
7 – автоматический лубрикатор;
8 – корпус;
9 – ходовой винт;
10 – гайка;
11 – шток;
12 – каретка;
13 – сухари;
14 – винтовые ролики;
15 – сепараторы;
16 – коронные шестерни;
17 – радиально-упорные подшипники;
18 – узел уплотнений;
19 – датчик силоизмерительный тензорезисторный;
20 – датчики положения.
Электромеханический привод поступательного действия (1) (см. Фиг. 1 – 3) является модульной конструкцией, включающей в себя серводвигатель (2), роликовинтовую планетарную передачу (3) и двухступенчатый редуктор (4), снабжённый шевронными колесами (5), с помощью которых передается крутящий момент от серводвигателя (2) к роликовинтовой планетарной передаче (3).
К двухступенчатому редуктору (4) присоединен ручной дублер (6), позволяющий выполнять монтажно-наладочные работы и перемещения штока привода (11) в ручном режиме, а также автоматический лубрикатор (7), предназначенный для осуществления смазки шевронных колес (5) консистентной смазкой в автоматическом режиме.
Роликовинтовая планетарная передача (3) (см. Фиг. 4) включает в себя корпус (8), в котором установлены ходовой винт (9) и гайка (10), соединённая со штоком (11), при этом гайка (10) закреплена в каретке (12), которая имеет возможность перемещения в корпусе (8).
Для предотвращения вращения гайки (10) на каретке (12) установлены сухари (13), которые имеют возможность перемещения по направляющим корпуса (8). При этом, внутри гайки (10) установлены параллельно друг другу, по меньшей мере три винтовых ролика (14), которые входят в зацепление как с гайкой (10), так и с ходовым винтом (9). Винтовые ролики (14) установлены между двумя сепараторами (15), которые служат для их позиционирования в гайке (10), для обеспечения их синхронного вращения на сепараторы (15) запрессованы коронные шестерни (16), входящие в зацепления с зубчатыми насечками на концах винтовых роликов.
Ходовой винт (9) установлен в радиально-упорных подшипниках (17). При этом на ходовом винте (9), со стороны, противоположной от штока (11), закреплено шевронное колесо двухступенчатого редуктора (4).
В корпусе (8) также установлен узел уплотнений (18), через который проходит шток (11).
Для контроля нагрузки на шток (11), на нём может быть установлен датчик силоизмерительный тензорезисторный (19) (см. Фиг. 1), а для определения предельных положений каретки (12) на корпусе (8) также могут быть установлены по меньшей мере два датчика положения (20).
Электромеханический привод поступательного действия предназначен для создания контролируемого перемещения элементов исполнительных механизмов в технологических процессах систем управления энергетических машин, путем преобразования вращательного движения выходного вала серводвигателя в поступательное движение штока, и он работает следующим образом.
При наличии электрического сигнала на входе серводвигателя (2) крутящий момент передается от его выходного вала через двухступенчатый редуктор (4) на ходовой винт (9) роликовинтовой планетарной передачи (3). Ходовой винт (9) передаёт с помощью винтовых роликов (14), которые синхронно вращаются вокруг своей оси, а также вместе с сепараторами (15) и запрессованными на них коронными шестернями (16) вокруг оси ходового винта (9), продольное усилие на гайку (10), которое приводит к её поступательному перемещению вместе с кареткой (12) внутри корпуса (8).
Для предотвращения поворота гайки (10) служат сухари (13), закрепленные на каретке (12), которые имеют возможность перемещения по направляющим, выполненным в корпусе (8). Каретка (12) при своём продольном перемещении приводит к продольному перемещению штока (11), соединенного с исполнительным механизмом.
Конструкция роликовинтовой планетарной передачи позволяет передавать усилие на исполнительные механизмы через шток (11) в обоих направлениях вдоль его оси. Для компенсации нагрузок от рабочего перемещения штока (11) ходовой винт (9) установлен в радиально-упорные подшипники (17), которые не позволяют ему выполнять продольные перемещения в корпусе (8). На ходовой винт (9) установлено шевронное колесо (5), входящее в состав двухступенчатого редуктора (4).
Шевронная передача позволяет осуществлять передачу значительного крутящего момента, при этом отсутствуют осевые нагрузки на детали двухступенчатого редуктора (4) и осевые нагрузки на ходовой винт (9).
Смазка шевронных колес (5) осуществляется в автоматическом режиме посредством подачи консистентной смазки в зону зацепления шевронных колес (5) с помощью лубрикатора (7).
Для контроля нагрузки на шток (11), на нём может быть установлен датчик силоизмерительный тензорезисторный (19), а также на корпусе роликовинтовой передачи (8) могут быть установлены по меньшей мере два датчика положения (20), передающие информацию о положениях гайки (10) и каретки (12).
Таким образом, заявляемая конструкция электромеханического привода поступательного действия отличается от известных аналогов следующими преимуществами:
- Возможна эксплуатация привода в сложных температурных условиях;
- Элементы, применённые в конструкции привода, обеспечивают малые моменты инерции, которые в совокупности обеспечивают малый момент инерции всего электромеханического привода поступательного действия, что позволяет его применять при значительно больших усилиях, по сравнению с аналогичными конструкциями приводов;
Кроме того, заявляемая конструкция обладает большим ресурсом работы, высокой надежностью и компактностью.
Таким образом, заявленная конструкция электромеханического привода поступательного действия позволяет его использовать в различных системах регулирования энергетических машин, в том числе в сложных для эксплуатации условиях, например, в исполнительных механизмах устройств управления, регулирующих режимы работы паровых турбин.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛИНЕЙНЫЙ ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД C ВОЗМОЖНОСТЬЮ СМАЗЫВАНИЯ БЕЗ ДЕМОНТАЖА | 2019 |
|
RU2719493C1 |
| Автоматизированный ортопедический аппарат внешней фиксации | 2017 |
|
RU2657937C1 |
| ОРТОПЕДИЧЕСКИЙ АППАРАТ ОСТЕОСИНТЕЗА | 2006 |
|
RU2339332C2 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД | 2018 |
|
RU2672150C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД | 2018 |
|
RU2672154C1 |
| ВИНТОВАЯ ПЕРЕДАЧА | 2013 |
|
RU2544033C1 |
| ПЛАНЕТАРНАЯ ПЕРЕДАЧА ВИНТ - ГАЙКА С ДЛИННЫМИ РЕЗЬБОВЫМИ РОЛИКАМИ | 2004 |
|
RU2292502C2 |
| Узел клапанного затвора горячеканальной системы | 2019 |
|
RU2717797C1 |
| ЭЛЕКТРОПРИВОД НА БАЗЕ ПЕРЕДАЧИ С ДЛИННЫМИ РЕЗЬБОВЫМИ РОЛИКАМИ | 2004 |
|
RU2297563C2 |
| РЕГУЛИРУЕМЫЙ ВЕНТИЛЯТОР АППАРАТА ВОЗДУШНОГО ОХЛАЖДЕНИЯ | 2000 |
|
RU2183290C2 |

Изобретение относится к области машиностроения, а более конкретно к электромеханическим приводам. Электромеханический привод поступательного действия состоит из серводвигателя, роликовинтовой планетарной передачи и двухступенчатого редуктора. Редуктор включает в себя шевронные колеса, ручной дублер и автоматический лубрикатор. Роликовинтовая планетарная передача имеет ходовой винт и шток. Шток соединён с гайкой, на наружном диаметре которой установлена каретка с сухарями. Внутри гайки установлены параллельно оси корпуса винтовые ролики, находящиеся в зацеплении как с гайкой, так и с ходовым винтом. Винтовые ролики установлены между сепараторами с коронными шестернями. Достигается повышение жесткости конструкции. 6 ил.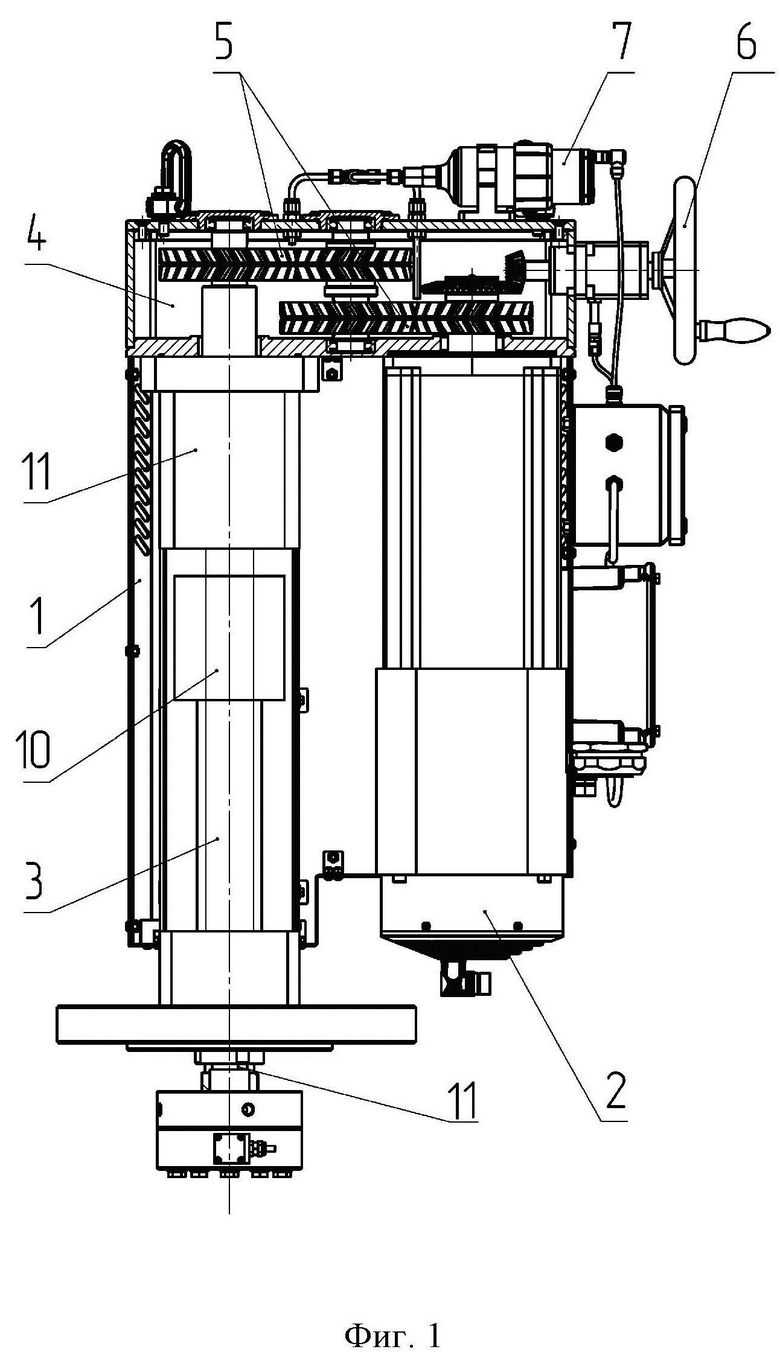
Электромеханический привод поступательного действия, состоящий из серводвигателя, роликовинтовой планетарной передачи и двухступенчатого редуктора, при этом двухступенчатый редуктор включает в себя шевронные колеса, с помощью которых передается крутящий момент от серводвигателя к роликовинтовой планетарной передаче, ручной дублер, позволяющий выполнять монтажно-наладочные работы и осуществлять перемещения штока привода в ручном режиме, а также автоматический лубрикатор, предназначенный для осуществления смазки шевронных колес консистентной смазкой в автоматическом режиме, а роликовинтовая планетарная передача включает в себя корпус, в котором размещены ходовой винт, соединённый с шевронным колесом двухступенчатого редуктора и установленный в радиально-упорных подшипниках, размещённых в корпусе, а также шток, установленный в узле уплотнений, также размещённом в корпусе, при этом шток соединён с гайкой, на наружном диаметре которой установлена каретка с сухарями, предназначенными для предотвращения вращения гайки и которые имеют возможность перемещения по направляющим, выполненным внутри корпуса, причём внутри гайки установлены параллельно оси корпуса винтовые ролики, находящиеся в зацеплении как с гайкой, так и с ходовым винтом, при этом винтовые ролики установлены между двумя сепараторами с запрессованными на них коронными шестернями, служащими для позиционирования и синхронизации вращения винтовых роликов в гайке.
| Электромеханический привод поступательного действия | 2017 |
|
RU2671662C2 |
| US 10507817 B2, 17.12.2019 | |||
| ПРИВОД | 1999 |
|
RU2238193C2 |
| ЛИНЕЙНЫЙ ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД C ВОЗМОЖНОСТЬЮ СМАЗЫВАНИЯ БЕЗ ДЕМОНТАЖА | 2019 |
|
RU2719493C1 |
| ЭЛЕКТРИЧЕСКИЙ ПРИВОДНОЙ МЕХАНИЗМ ДЛЯ КЛАПАНА, ПРЕДНАЗНАЧЕННОГО ДЛЯ ОТКРЫТИЯ/ЗАКРЫТИЯ КОКСОВОГО БАРАБАНА | 2013 |
|
RU2608450C2 |

