Изобретение относится к системам управления угловым движением летательных аппаратов и может быть использовано для управления летательными аппаратами с нерегулируемой тягой в условиях действия возмущений.
Известно устройство (фиг.1), осуществляющее управление угловым движением летательных аппаратов с нерегулируемой тягой, которое обеспечивает контроль ухода центра масс от энергетически оптимальной траектории (ЭОТ) по действительным характеристикам ухода (см. Могилевский В.Д. Наведение баллистических летательных аппаратов. - М.: Машиностроение, 1976 г. с. 31).
Данное устройство содержит блок измерителей 1, первый интегратор 2, блок навигации 3, блок формирования программы 4, второй 5 и третий 6 интеграторы, первый 7 и второй 8 блок коэффициентов, сумматор 9, исполнительные органы 10 и объект управления 11, при этом первый выход блока измерителей 1 соединен со входами блока навигации 3 и первого интегратора 2, а второй со входом первого блока коэффициентов 7, выход первого интегратора 2 соединен со входом блока формирования программы 4, выходы которого соединены со входом первого блока коэффициентов 7, выход блока навигации 3 соединен со входом третьего интегратора 6, выход которого соединен со входами второго интегратора 5 и второго блока коэффициентов 8, при этом выход второго интегратора 5 также соединен со входом второго блока коэффициентов 8, выход которого, также как и выход первого блока коэффициентов 7, соединен со входом сумматора 9, выход которого соединен с исполнительными органами 10, соединенными также с объектом управления 11, который соединен со входом блока измерителей 1.
Недостатком прототипа является неспособность контролировать с приемлемой точностью уход центра масс объекта от своей энергетически оптимальной траектории в условиях больших длительных возмущений. Так, закон регулирования на первом этапе
(фиг. 1) позволяет отрабатывать только импульсные возмущения, при этом ликвидируя отклонение только по ускорению и не контролируя отклонения по скорости и координате, что не гарантирует нахождение летательного аппарата вблизи энергетически оптимальной траектории и, следовательно, достижение цели управления. На втором этапе управления из-за наличия ошибок по скорости и координате, не ликвидированных на первом этапе, нарушаются условия линеаризации и закон регулирования
(фиг. 1) обеспечивает отработку больших возмущений с неприемлемыми погрешностями.
Цель изобретения заключается в уменьшении методической ошибки управления и, следовательно, повышении точности отслеживания ухода центра масс летательного аппарата от своей энергетически оптимальной траектории в условиях больших возмущений.
Требуемый технический результат достигается тем, что в устройство, содержащее блок измерителей 1, первый интегратор 2, блок формирования программы 3, первый 4 и второй 5 блок коэффициентов, сумматор 6, исполнительные органы 7, объект управления 8, второй 10 и третий 12 интеграторы, при этом первый выход блока измерителей 1 соединен со входами первого 2 и второго 10 интеграторов, а второй со входом первого блока коэффициентов 4, выход третьего интегратора 12 соединен со входом второго блока коэффициентов 5, выход первого интегратора 2 соединен со входом блока формирования программы 3, выходы которого соединены со входом первого блока коэффициентов 4, выход которого, также как и выход второго блока коэффициентов 5, соединен со входом сумматора 6, выход которого соединен с исполнительными органами 7, соединенными также с объектом управления 8, который соединен со входом блока измерителей 1, дополнительно введены второй сумматор 11 и блок расчета программных значений кажущейся скорости 9, при этом один вход второго сумматора 11 соединен с выходом второго интегратора 10, второй - с выходом блока расчета программных значений кажущейся скорости 9, вход которого соединен с первым выходом блока измерителей 1, первый выход второго сумматора 11 соединен со входом третьего интегратора 12, а второй - со входом второго блока коэффициентов 5 (фиг.2).
Сравнительный анализ с прототипом показал, что новое техническое решение отличается введением вместо блока навигации второго сумматора 11 и блока расчета программных значений кажущейся скорости 9, обеспечивающих учет в управляющем воздействии δυ интеграла от разности реальной и соответствующей программе вертикальных составляющих кажущейся скорости и самой разности, что позволяет контролировать уход центра масс от энергетически оптимальной траектории Следовательно заявленное изобретение соответствует критерию "новизна".
До даты подачи заявки из патентной и научно-технической литературы неизвестна такая совокупность существенных признаков, требуемая для решения данной технической задачи, что говорит об изобретательском уровне технического решения.
Структурная схема заявляемого устройства представлена на фиг. 2.
Устройство (фиг.2) содержит последовательно соединенные блок измерителей 1, первый интегратор 2, блок формирования программы 3, первый блок коэффициентов 4, второй вход которого соединен со вторым выходом блока измерителей 1, первый сумматор 6, исполнительные органы 7, объект управления 8, выход которого соединен со входом блока измерителей 1, второй интегратор 10 и блок расчета программных значений кажущейся скорости 9, входы которых соединены с выходами блока измерителей 1, а выходы - со входом второго сумматора 11, выходы которого соединены со входами второго блока коэффициентов 5 и третьего интегратора 12, выход которого также соединен со входом второго блока коэффициентов 5, выход которого соединен со входом первого сумматора 6.
Устройство управления угловым движением летательных аппаратов с нерегулируемой тягой работает следующим образом.
Блок измерителей формирует информацию о движении центра масс летательного аппарата и об угловом движении вокруг центра масс. Далее данная информация поступает в контур выработки программы, контур контроля ухода центра масс летательного аппарата от своей энергетически оптимальной траектории и блок формирования управляющего воздействия.
Контур выработки программы состоит из первого интегратора 2 и блока выработки программы 3 и обеспечивает формирование и передачу в блок формирования управляющего воздействия программных значений угла тангажа и тангажной скорости.
Контур контроля ухода центра масс летательного аппарата от своей энергетически оптимальной траектории включает второй 10 и третий 12 интеграторы, второй сумматор 11 и блок расчета программных значений кажущейся скорости 9 и обеспечивает учет в управляющем воздействии δυ интеграла от разности реальной и соответствующей программе вертикальных составляющих кажущейся скорости и самой разности.
Блок формирования управляющего воздействия, состоящий из первого 4 и второго 5 блока коэффициентов и первого сумматора 6, передает па исполнительные органы 7 управляющие команды с целью отработки объектом управления программы угла тангажа и обеспечения движения летательного аппарата по своей энергетически оптимальной траектории.
Сущность изобретения будет более понятна из рассмотрения графических изображений, где на фиг.3 представлены траектория полета летательного аппарата, трубка траекторий, обусловленная разбросом характеристик горения топлива твердотопливного двигателя, трубка траекторий, обусловленная наличием запасов топлива, график изменения скоростного напора случайного большого внешнего воздействия, плотности распределения случайной характеристики Δy (расстояния от центра масс летательного аппарата до ЭОТ) для алгоритмов, формируемых существующим (фиг. 1) и разработанным (фиг.2) устройствами. Анализ плотностей распределения (фиг.3) позволяет сделать вывод, что обеспечить сужение трубки возмущенных траекторий, предотвратить уход летательного аппарата от программы па интервале воздействия больших возмущений возможно за счет уменьшения расстояния Δy центра масс от своей энергетически оптимальной траектории.
С целью уменьшения ухода центра масс от программы на интервале больших возмущений (см. фиг.3), заявленное устройство обеспечивает выполнение условия  где
где
за счет реализации управляющего воздействия (см. фиг.2)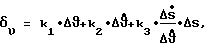
где ΔS = ∫(WA1-W
WА1 и W*А2 - реальная и соответствующая программе вертикальные составляющие кажущейся скорости,
Δυ - разность программного и реального значений угла тангажа, разность программного и реального значений тангажной скорости.
разность программного и реального значений тангажной скорости.
Вследствие наличия постоянного контроля за уходом летательного аппарата от энергетически оптимальной траектории за счет учета в управляющем воздействии δυ интеграла от разности реальной и соответствующей программе вертикальных составляющих кажущейся скорости, дополнительная методическая погрешность управления мала по сравнению с погрешностью (фиг.4), характерной для устройства-прототипа (фиг.1), что обеспечивает сохранение постоянной привязки летательного аппарата к своей энергетически оптимальной траектории.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ПОИСКА ШУМОПОДОБНЫХ СИГНАЛОВ | 2001 |
|
RU2204885C2 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ПРОЦЕССА ПРИНЯТИЯ РЕШЕНИЙ | 2002 |
|
RU2214624C2 |
| СПОСОБ КАЛИБРОВКИ ГИРОСКОПОВ | 2001 |
|
RU2205367C1 |
| СПОСОБ ОБРАБОТКИ И АНАЛИЗА ИЗМЕРИТЕЛЬНЫХ СИГНАЛОВ С КОНТРОЛИРУЕМОГО ОБЪЕКТА (ВАРИАНТЫ) | 2000 |
|
RU2160451C1 |
| СИСТЕМА ОПОЗНАВАНИЯ "СВОЙ-ЧУЖОЙ" | 2000 |
|
RU2189610C1 |
| УСТРОЙСТВО ДЛЯ ДОПУСКОВОГО КОНТРОЛЯ ФУНКЦИОНАЛЬНЫХ СОСТОЯНИЙ ТЕХНИЧЕСКИХ СИСТЕМ | 2000 |
|
RU2178199C1 |
| СПОСОБ КАЛИБРОВКИ ГИРОСКОПОВ | 2001 |
|
RU2204806C1 |
| СПУТНИКОВАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА | 2001 |
|
RU2181927C1 |
| УСТРОЙСТВО ОПТИЧЕСКОЙ ЛИНИИ СВЯЗИ | 2000 |
|
RU2170491C1 |
| СПОСОБ УПРАВЛЕНИЯ ТЕХНИЧЕСКИМ СОСТОЯНИЕМ СЛОЖНЫХ СИСТЕМ | 2000 |
|
RU2182350C1 |



Изобретение относится к технике управления летательными аппаратами с нерегулируемой тягой в условиях действия возмущений. Устройство содержит блок измерителей, три интегратора, два блока коэффициентов, блок формирования программы, два сумматора, объект управления, исполнительные органы, блок расчета программных значений кажущейся скорости. Устройство обеспечивает управление летательными аппаратами при значительных возмущениях. За счет постоянной привязки к программе изменения угла тангажа достигается уменьшение методической ошибки управления и повышение точности отслеживания ухода центра масс летательного аппарата от своей энергетически оптимальной траектории. 4 ил.
Устройство управления угловым движением летательных аппаратов с нерегулируемой тягой, содержащее блок измерителей 1, первый интегратор 2, блок формирования программы 3, первый 4 и второй 5 блоки коэффициентов, сумматор 6, исполнительные органы 7, объект управления 8, второй 10 и третий 12 интеграторы, при этом первый выход блока измерителей 1 соединен со входами первого 2 и второго 10 интеграторов, а второй - со входом первого блока коэффициентов 4, выход третьего интегратора 12 соединен со входом второго блока коэффициентов 5, выход первого интегратора 2 соединен со входом блока формирования программы 3, выходы которого соединены со входом первого блока коэффициентов 4, выход которого так же, как и выход второго блока коэффициентов 5, соединен со входом сумматора 6, выход которого соединен с исполнительными органами 7, соединенными также с объектом управления 8, который соединен со входом блока измерителей 1, отличающееся тем, что в него дополнительно введены второй сумматор 11 и блок расчета программных значений кажущейся скорости 9, при этом один вход второго сумматора 11 соединен с выходом второго интегратора 10, второй - с выходом блока расчета программных значений кажущейся скорости 9, вход которого соединен с первым выходом блока измерителей 1, первый выход второго сумматора 11 соединен со входом третьего интегратора 12, а второй - со входом второго блока коэффициентов 5.
| МОГИЛЕВСКИЙ В.Д | |||
| Наведение баллистических летательных аппаратов | |||
| - М.: Машиностроение, 1976, с | |||
| Способ очистки нефти и нефтяных продуктов и уничтожения их флюоресценции | 1921 |
|
SU31A1 |
| СПОСОБ УПРАВЛЕНИЯ КОСМИЧЕСКИМ АППАРАТОМ С ПОМОЩЬЮ РЕАКТИВНЫХ ИСПОЛНИТЕЛЬНЫХ ОРГАНОВ ПРИ ПОДДЕРЖАНИИ ЗАДАННОЙ ОРИЕНТАЦИИ | 1996 |
|
RU2112713C1 |
| СПОСОБ СПУСКА УСКОРИТЕЛЯ РАКЕТЫ КОСМИЧЕСКОГО НАЗНАЧЕНИЯ В ПОСАДОЧНУЮ ЗОНУ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2043954C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ УПРАВЛЕНИЯ РАКЕТОЙ С КРЕСТООБРАЗНЫМ РАСПОЛОЖЕНИЕМ КРЫЛЬЕВ | 1980 |
|
RU2089452C1 |
| УСТРОЙСТВО ДЛЯ СТАБИЛИЗАЦИИ УГЛОВОГО ДВИЖЕНИЯ КОСМИЧЕСКОГО АППАРАТА | 1992 |
|
RU2020113C1 |

