Изобретение относится к приборам, измеряющим вертикальное перемещение судна на качке. Такие приборы используются для компенсации влияния качки на работу ряда устройств и систем, используемых на надводных и подводных объектах, таких как:
- гравиметры;
- однолучевые и многолучевые эхолоты;
- профилографы;
- гидролокаторы бокового обзора;
- антенны гидроакустических систем слежения за автономными подводными объектами;
- лазерные устройства для измерения параметров состояния поверхности океана и атмосферы;
- некоторые разновидности антенн радиолокационных станций, систем спутниковой связи и спутникового телевидения;
- автономные буи для исследования экологии океана;
- гидроакустические приборы в буксируемых необитаемых подводных аппаратах.
Рассматриваемые датчики вертикальной качки относятся к группе устройств, в которых сигнал, пропорциональный вертикальному перемещению, получается в результате двукратного интегрирования сигнала пропорционального вертикальному ускорению.
Известно устройство для измерения вертикальной качки (патент Германии 2803635), состоящее из вертикально расположенного акселерометра выход которого соединен с последовательно включенными первым и вторым интеграторами на апериодических усилителях. С целью компенсации постоянной составляющей сигнала на выходе акселерометра, выход второго интегратора соединен через интегродифференцирующий усилитель обратной связи с входом первого интегратора. Такая схема образует колебательное звено с большой постоянной времени. Величина постоянной времени колебательного звена выбирается так, чтобы для минимальной частоты качки (0,05 Гц) фазовый сдвиг выходного сигнала относительно входного приближался к 180o.
Недостатком такого устройства является то, что в случае выведения его из установившегося режима в нем возникает длительный переходный процесс, обусловленный большой постоянной времени звена, состоящего из двух апериодических усилителей, охваченных интегродифференцирующей обратной связью.
Наиболее близким прототипом является устройство для измерения вертикальной качки (патент США 4104608), состоящее из вертикально расположенного акселерометра, выход которого соединен через первый вход вычитателя с последовательно включенными первым и вторым интеграторами на апериодических усилителях, причем выход первого апериодического усилителя связан посредством интегратора со вторым входом вычитателя.
Недостатком такого устройства, является то, что для обеспечения интегрирования сигнала акселерометра без амплитудных и фазовых искажений на минимальной частоте качки (порядка 0,05 Гц) необходимо выбирать большие постоянные времени (40-60 с) апериодического и колебательного звеньев. В случае импульсного воздействия на такую систему (удар волны по корпусу судна) в ней возникает переходный процесс большой амплитуды и длительности, во время которого погрешность интегрирования значительно превышает заданные пределы. Такие импульсные воздействия характерны для движения судна против волны или для малогабаритных судов. И в том, и в другом случае частота качки бывает близка к минимальной и составляет порядка 0,2-1 Гц. При таких значениях частоты качки для обеспечения интегрирования сигнала акселерометра без амплитудных и фазовых искажений можно существенно уменьшить постоянные времени апериодического и колебательного звеньев (до 5-10 с), что приведет к значительному уменьшению амплитуды и длительности переходного процесса при импульсном воздействии и позволит повысить точность интегрирования.
Задачей предлагаемого устройства является повышение точности измерения вертикального перемещения судна.
Предлагаемое устройство для измерения вертикальной качки судна содержит вертикально расположенный акселерометр, вычитатель, первое и второе апериодические звенья, интегратор обратной связи, измеритель спектра и управляющее устройство, причем выход акселерометра связан со входом первого апериодического звена, выход которого связан с первым входом вычитателя, выход вычитателя связан со вторым апериодическим звеном, выход которого связан с интегратором обратной связи, а выход интегратора обратной связи - со вторым входом вычитателя, кроме того, выход акселерометра посредством измерителя спектра связан с входом управляющего устройства, выходы которого один связан с первым апериодическим звеном, а второй - с интегратором обратной связи.
Сущность предлагаемого изобретения заключается в том, что устройство измерения спектра определяет преобладающую частоту качки по сигналу акселерометра. В соответствии с изменением преобладающей частоты качки управляющее устройство изменяет постоянные времени первого апериодического звена и колебательного звена, образованного вторым апериодическим звеном, охваченным интегрирующей обратной связью. Таким образом, при уменьшении преобладающей частоты качки уменьшаются постоянные времени интеграторов, что приводит к уменьшению длительности и амплитуды переходного процесса, возникающего в случае наличия импульсного воздействия на систему. Закон изменения постоянных времени интеграторов выбирается таким образом, чтобы для текущего значения преобладающей частоты качки амплитудные и фазовые искажения были минимальными.
На чертеже показана структурная схема устройства для измерения вертикальной качки судна.
Выход вертикально расположенного акселерометра 1 соединен со входом первого апериодического звена 2, выполняющего функцию первого интегратора. Выход первого апериодического звена 2 соединен с первым входом вычитателя 3, выход которого соединен со входом второго апериодического звена 4, выход которого, в свою очередь, соединен с входом интегратора обратной связи 5. Выход интегратора обратной связи 5 соединен со вторым входом вычитателя 3. Кроме того, выход акселерометра 1 соединен со входом устройства измерения спектра 6, выход которого соединен со входом управляющего устройства 7, первый и второй выходы которого соединены с управляющими входами первого интегратора 2 и интегратора обратной связи 5 соответственно.
Работа устройства происходит следующим образом. Акселерометр 1 ориентируется по вертикали места с помощью гировертикали или бесплатформенной системы ориентации. При возникновении вертикальной качки на его выходе появляется сигнал, пропорциональный вертикальному ускорению. Этот сигнал поступает на вход первого апериодического звена 2, выполняющего функцию первого интегратора. Для этого постоянная времени апериодического звена выбирается так, чтобы фазовый сдвиг выходного сигнала относительно входного в полосе частот качки (0,05-1 Гц) составлял 90o. Таким образом, сигнал на выходе апериодического звена 2 пропорционален линейной скорости вертикальной качки. Этот сигнал поступает на вход звена, образованного вторым апериодическим звеном 4, интегратором обратной связи 5 и вычитателем 3, передаточная функция которого имеет вид
где К2 - коэффициент передачи второго апериодического звена;
Tк - постоянная времени колебательного звена, полученного в результате охвата апериодического звена интегрирующей обратной связью;
ξ - относительный коэффициент демпфирования колебательного звена.
Причем постоянная времени и относительный коэффициент демпфирования колебательного звена могут быть выражены через параметры второго апериодического звена и интегрирующей обратной связи

где Т2 - постоянная времени второго апериодического звена;
Ки - коэффициент передачи интегрирующей обратной связи.
Передаточная функция (1) обладает свойством дифференцирования, то есть не пропускает на выход системы постоянную составляющую сигнала, поступающего через апериодическое звено с выхода акселерометра. Колебательное звено выполняет операцию однократного интегрирования с учетом вида числителя выражения (1). Его параметры выбираются так, чтобы в диапазоне частот качки фазовый сдвиг выходного сигнала приближался к 90o. Таким образом, на выходе второго апериодического звена 4 сигнал пропорционален вертикальному перемещению судна на качке. Кроме того, использование интегрирующей обратной связи сводит постоянную составляющую сигнала на выходе устройства к нулю, что позволяет работать интегратору без насыщения неограниченное время.
С выхода акселерометра 1 сигнал поступает также на вход устройства измерения спектра 6, в котором определяется преобладающая частота качки. Сигнал, пропорциональный преобладающей частоте качки, с выхода устройства 6 поступает на вход управляющего устройства 7, которое в соответствии с текущим значением преобладающей частоты изменяет величины постоянных времени первого апериодического звена 2 и колебательного звена. Закон изменения постоянных времени интеграторов выбирается таким образом, чтобы для текущего значения преобладающей частоты качки амплитудные и фазовые искажения были минимальными. Причем, изменение постоянной времени колебательного звена в соответствии с выражением (2) может быть обеспечено за счет изменения коэффициента передачи интегрирующей обратной связи Ки. Таким образом, введение управления величинами постоянных времени первого апериодического звена 2 и колебательного звена, выполняющего функцию второго интегратора, позволяет поддерживать их значения на минимально возможном уровне, обеспечивающем заданную величину амплитудной и фазовой погрешности интегрирования для текущего значения преобладающей частоты качки.
Таким образом, совокупность признаков предлагаемого устройства, реализация которых может быть выполнена в соответствии c чертежом, позволяет повысить динамическую устойчивость системы к импульсным воздействиям, возникающим, в частности, при ударах волны о борт судна, а так же при изменении его скорости движения. Устройство может быть реализовано в виде электронной схемы или (предпочтительно) в виде программы, работающей в реальном масштабе времени.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВЕРТИКАЛЬНОЙ КАЧКИ СУДНА | 2003 |
|
RU2234060C1 |
| СИСТЕМА КОРРЕКЦИИ ГИРОСТАБИЛИЗАТОРА МОРСКОГО ГРАВИМЕТРА | 2005 |
|
RU2277223C1 |
| СИСТЕМА КОРРЕКЦИИ ГИРОСТАБИЛИЗАТОРА МОРСКОГО ГРАВИМЕТРА | 2003 |
|
RU2244261C1 |
| СИСТЕМА КОРРЕКЦИИ ГИРОСТАБИЛИЗАТОРА МОРСКОГО ГРАВИМЕТРА | 2007 |
|
RU2332642C1 |
| СИСТЕМА КОРРЕКЦИИ | 2005 |
|
RU2282148C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 2009 |
|
RU2400761C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 2009 |
|
RU2405160C1 |
| ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНЫЙ РЕГУЛЯТОР С ОГРАНИЧЕНИЯМИ ВЫХОДНЫХ СИГНАЛОВ | 1998 |
|
RU2120655C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 2000 |
|
RU2165625C1 |
| СИСТЕМА КОРРЕКЦИИ ГИРОСТАБИЛИЗАТОРА МОРСКОГО ГРАВИМЕТРА | 2005 |
|
RU2282147C1 |
Устройство предназначено для использования при компенсации влияния качки на работу однолучевых и многолучевых эхолотов, а также ряда других устройств и систем надводных и подводных объектов. Технический результат - повышение точности интегрирования и динамической устойчивости измерителя вертикальной качки к импульсным воздействиям, возникающим, в частности, при ударах волны о борт судна, а также при изменении его скорости движения. Устройство содержит линейный акселерометр, ориентированный вертикально, вычитатель, первое и второе апериодические звенья, выполняющие функции интеграторов, интегратор обратной связи, измеритель спектра и управляющее устройство. Управляющее устройство изменяет постоянные времени первого и второго интеграторов в соответствии с изменением текущего значения преобладающей частоты качки, что позволяет поддерживать их значения на минимально возможном уровне, обеспечивающем заданную величину амплитудной и фазовой погрешности интегрирования. 1 ил.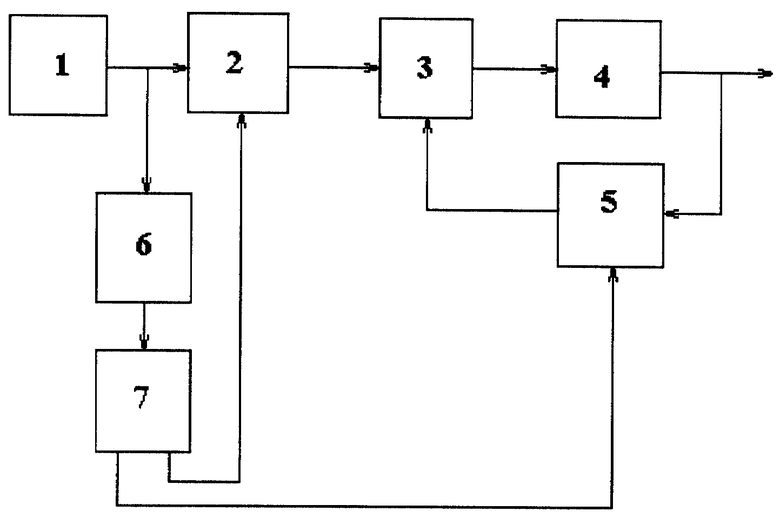
Устройство для измерения вертикальной качки судна, содержащее вертикально расположенный акселерометр, вычитатель, первое и второе апериодические звенья, интегратор обратной связи, отличающееся тем, что в него дополнительно введены измеритель спектра и управляющее устройство, причем выход акселерометра связан со входом первого апериодического звена, выход которого связан с первым входом вычитателя, выход вычитателя связан со вторым апериодическим звеном, выход которого связан с интегратором обратной связи, а выход интегратора обратной связи - со вторым входом вычитателя, кроме того, выход акселерометра посредством измерителя спектра связан с входом управляющего устройства, выходы которого один связан с первым апериодическим звеном, а второй - с интегратором обратной связи.
| US 4104608, 01.08.1978 | |||
| СПОСОБ ИНТРАОПЕРАЦИОННОГО ОПРЕДЕЛЕНИЯ ПРЕДЛЕЖАНИЯ СИГМОВИДНОГО СИНУСА | 2002 |
|
RU2215468C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПЕРЕМЕЩЕНИЙ ОБЪЕКТА | 1991 |
|
RU2018086C1 |
| US 4095547, 20.06.1978. | |||

