Изобретение относится к гироскопической технике, а более конкретно к двухосным гиростабилизаторам, работающим на подвижных объектах, выполняющим функцию гировертикали и предназначенным для стабилизации гравиметров.
Известно устройство системы коррекции двухосного гиростабилизатора [Ривкин С.С. Теория гироскопических устройств, ч.II. - Л.: Судостроение, 1964, стр.470], содержащее два идентичных канала, включающее в каждом канале последовательно соединенные акселерометр, интегратор, сумматор и датчик момента гироскопа, кроме того, выход акселерометра соединен со входом усилителя прямой положительной связи, выход которого соединен со вторым входом сумматора. Передаточная функция гиростабилизатора с таким устройством системы коррекции, представляющая собой отношение ошибки стабилизации к горизонтальным ускорениям качки, имеет наклон логарифмической амплитудно-частотной характеристики в полосе частот выше частоты среза -20 дБ на декаду и фазовый сдвиг между горизонтальными ускорениями качки и ошибкой стабилизации на частоте качки основания, близкий к -90° .
Недостатком такой системы коррекции является высокий уровень ошибки стабилизации из-за горизонтальных ускорений качки, что приводит к большой систематической ошибке измерения ускорения силы тяжести гиростабилизированным гравиметром из-за наклонов стабилизированной площадки, а также “зашумление” линейной зоны сумматора, управляющего моментным датчиком гироскопа, при значительной амплитуде горизонтальных ускорений качки.
Наиболее близким (прототипом) является устройство системы коррекции двухосного гиростабилизатора [Ривкин С.С., Береза А.Д. Гироскопическая стабилизация морских гравиметров. - М.: Наука, 1985, стр.131], содержащее два идентичных канала, включающее в каждом канале последовательно соединенные акселерометр, апериодическое звено первого порядка, изодромное устройство и датчик момента гироскопа. Передаточная функция гиростабилизатора с таким устройством системы коррекции имеет наклон логарифмической амплитудно-частотной характеристики в полосе частот выше частоты среза системы -40 дБ/дек.
Недостатком такой системы коррекции является то, что гиростабилизатор имеет фазовый сдвиг на частоте качки основания между горизонтальными ускорениями и ошибкой стабилизации, близкий к -180° , что приводит к большой систематической погрешности измерения величины ускорения силы тяжести гравиметром, установленным на стабилизированной площадке, из-за совместного влияния горизонтальных ускорений качки и наклонов гиростабилизированной площадки.
Задачей изобретения является повышение точности измерения ускорения силы тяжести гиростабилизированным гравиметром за счет применения системы коррекции гиростабилизатора, обеспечивающей повышение точности стабилизации и сдвиг фаз на частоте качки основания между горизонтальными ускорениями и ошибкой стабилизации точно равным -270° .
Задача решается тем, что предлагаемое устройство системы коррекции гиростабилизатора морского гравиметра содержит два идентичных канала, включает в каждом канале акселерометр, апериодическое звено, изодромное устройство, датчик момента гироскопа, интегратор, усилитель обратной связи, вычитатель, второе апериодическое звено, фильтр верхних частот, измеритель спектра, управляющее устройство, причем выход акселерометра связан с первым входом вычитателя, выход которого связан с входом интегратора, выход которого связан с входом апериодического звена, выход которого связан с входом усилителя обратной связи, выход которого связан со вторым входом вычитателя, выход апериодического звена связан также с входом изодромного устройства, выход которого связан с входом второго апериодического звена, выход которого связан с входом датчика момента гироскопа, кроме того, выход акселерометра связан со входом фильтра верхних частот, выход фильтра верхних частот посредством измерителя спектра связан с входом управляющего устройства, выход которого связан со вторым апериодическим звеном.
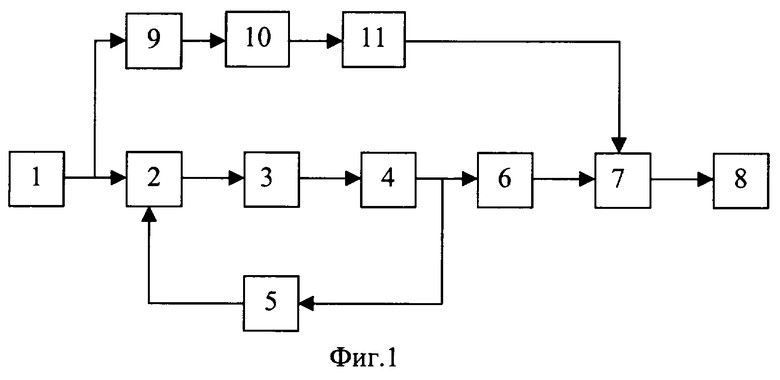
На фиг.1 показана структурная схема одного канала системы коррекции гиростабилизатора морского гравиметра. Один канал осуществляет горизонтирование стабилизируемой площадки двухосного гиростабилизатора по оси наружной рамы, а второй по оси стабилизируемой площадки. Работа каждого канала одинакова и независима друг от друга.
Выход акселерометра 1 соединен с первым входом вычитателя 2, выход вычитателя 2 соединен с входом интегратора 3, выход интегратора 3 соединен с входом апериодического звена 4, выход апериодического звена 4 соединен с входом усилителя отрицательной обратной связи 5, выход усилителя 5 соединен со вторым входом вычитателя 2, выход апериодического звена 4 соединен также со входом изодромного устройства 6, выход изодромного устройства 6 соединен со входом второго апериодического звена 7, выход которого соединен с входом датчика момента 8. Кроме того, выход акселерометра 1 соединен с входом фильтра верхних частот 9, выход фильтра верхних частот 9 соединен со входом измерителя спектра 10, выход которого соединен с входом управляющего устройства 11. Выход управляющего устройства 11 соединен со вторым апериодическим звеном 7.
Работа устройства происходит следующим образом.
Сигнал на выходе акселерометра 1, содержащий низкочастотную составляющую, обусловленную собственным движением стабилизированной площадки к горизонту от начального угла отклонения, и переменную составляющую, обусловленную горизонтальными ускорениями качки, поступает на первый вход вычитателя 2. Вычитатель 2, интегратор 3, апериодическое звено 4 и усилитель обратной связи 5, выход которого соединен со вторым входом вычитателя 2, образуют звено с передаточной функцией

где Т2 - постоянная времени колебательного звена, полученного в результате охвата интегратора и апериодического звена отрицательной обратной связью, ξ - относительный коэффициент демпфирования колебательного звена, k2 - коэффициент передачи колебательного звена.
Причем постоянная времени, относительный коэффициент демпфирования и коэффициент передачи колебательного звена могут быть выражены через постоянную времени интегратора Т, постоянную времени апериодического звена Т1, коэффициент передачи апериодического звена k и коэффициент передачи усилителя обратной связи k1 следующим образом:

Значение коэффициента ξ обеспечивается равным 0,707. Постоянная времени Т2 выбирается большей постоянной времени Тk, характеризующей качку основания. Колебательное звено (1) пропускает низкочастотную составляющую сигнала акселерометра 1 и эффективно сглаживает переменную составляющую сигнала акселерометра 1. Сигнал с выхода апериодического звена 4 поступает на вход изодромного устройства 6, имеющего передаточную функцию:

где Т3 - постоянная времени изодромного устройства. Изодромное устройство 6 обеспечивает интегрирование входного сигнала в области низких частот и требуемые запасы устойчивости на частоте среза системы.
Постоянная времени Т3 выбирается большей постоянной времени Тср, характеризующей частоту среза системы. Сигнал с выхода изодромного устройства 6 поступает на выход второго апериодического звена 7, имеющего переменную постоянную времени Т4 и создающего небольшой дополнительный фазовый сдвиг в системе, необходимый для обеспечения фазового сдвига между горизонтальными ускорениями качки и ошибкой стабилизации на частоте качки основания точно равным -270° . Кроме того, сигнал с выхода акселерометра 1 поступает также на вход фильтра верхних частот 9. Фильтр верхних частот 9 имеет передаточную функцию вида:

где Т5 - постоянная времени фильтра верхних частот.
Фильтр верхних частот 9 пропускает высокочастотную составляющую сигнала акселерометра 1 и эффективно сглаживает низкочастотную составляющую сигнала акселерометра 1. Сигнал с выхода фильтра верхних частот 9 поступает на вход устройства измерения спектра 10, в котором определяется преобладающая частота качки. Сигнал, пропорциональный преобладающей частоте качки с выхода устройства 10 поступает на вход управляющего устройства 11, которое в соответствии с текущим значением преобладающей частоты качки ω к изменяет величину постоянной времени Т4 второго апериодического звена 6 в соответствии с условием:

или

Значения постоянной времени Т4, определяемые в соответствии с (4), меньше постоянной времени Тк, характеризующей частоту качки основания. Сигнал с выхода второго апериодического звена 7 поступает на вход датчика момента гироскопа 8 и обеспечивает приведение к горизонту и удержание в горизонте стабилизируемой площадки с гравиметром при качке основания.
Передаточная функция гиростабилизатора с предлагаемой системой коррекции имеет вид:

где k0=kA·k2·k,
α (р) - ошибка стабилизации,
Wξ (p) - горизонтальные ускорения качки,
kА - коэффициент передачи акселерометра,
kг - коэффициент передачи гироскопа по управляющему воздействию,
g – ускорение силы тяжести.
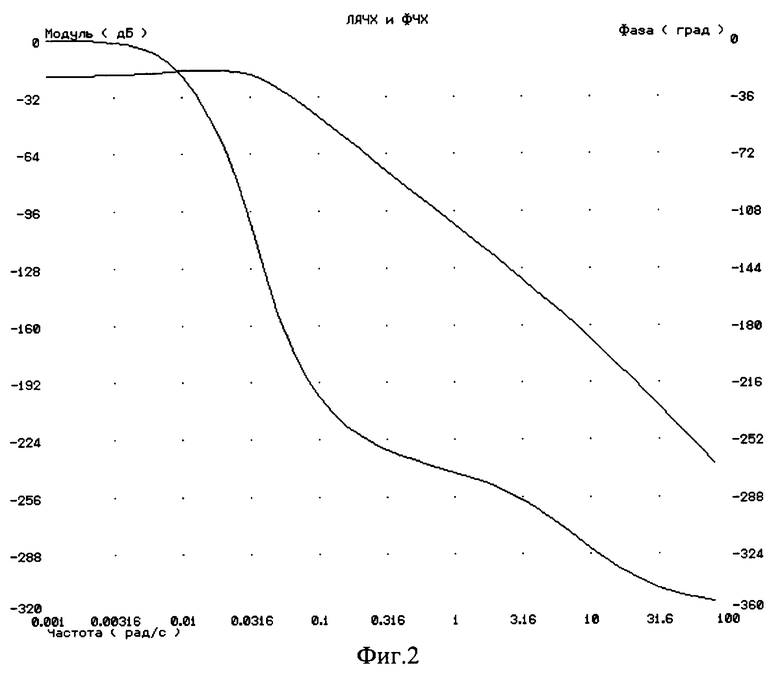
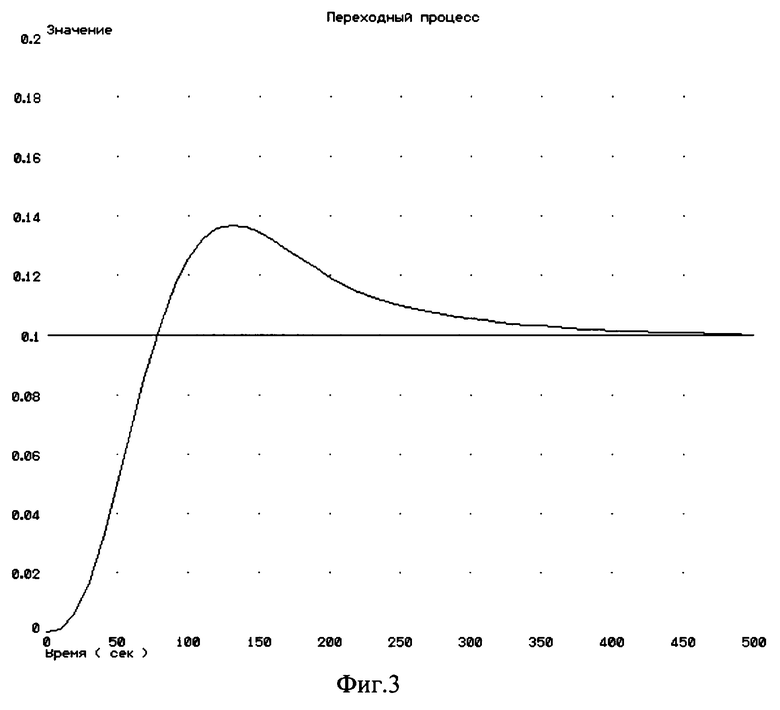
График логарифмических амплитудно-фазовых частотных характеристик передаточной функции (4) при следующих числовых параметрах: k0=1,3· 10-5, ξ =0,707, Т3=150 с, ω с=0,785 с-1, Т4=0,123 с приведен на фиг.2. График переходного процесса при единичном ступенчатом воздействии приведен на фиг.3.
Таким образом, введение вычитателя 2, интегратора 3, усилителя обратной связи 5, второго апериодического звена 7, фильтра верхних частот 9 устройства измерения спектра 10, управляющего устройства 11 обеспечивают наклон логарифмической амплитудно-частотной характеристики гиростабилизатора в области частот выше частоты среза до частоты  равным –60 дБ/дек и наклон логарифмической амплитудно-частотной характеристики в области частот выше частоты
равным –60 дБ/дек и наклон логарифмической амплитудно-частотной характеристики в области частот выше частоты  равным -80 дБ/дек и, следовательно, повышение точности стабилизации; а также фазовый сдвиг между горизонтальными ускорениями и ошибкой стабилизации точно равным -270° . Это приводит к уменьшению систематической составляющей измерения ускорения силы тяжести гиростабилизированным гравиметром из-за наклонов стабилизированной площадки -
равным -80 дБ/дек и, следовательно, повышение точности стабилизации; а также фазовый сдвиг между горизонтальными ускорениями и ошибкой стабилизации точно равным -270° . Это приводит к уменьшению систематической составляющей измерения ускорения силы тяжести гиростабилизированным гравиметром из-за наклонов стабилизированной площадки -  и равенству нулю систематической составляющей измерения ускорения силы тяжести гиростабилизированным гравиметром из-за совместного влияния горизонтальных ускорений и наклонов в гиростабилизированной площадке -
и равенству нулю систематической составляющей измерения ускорения силы тяжести гиростабилизированным гравиметром из-за совместного влияния горизонтальных ускорений и наклонов в гиростабилизированной площадке -

где А(ω к) - значение амплитудно-частотной характеристики передаточной функции гиростабилизатора на частоте качки,
Y(ω к) - значение фазовой частотной характеристики передаточной функции гиростабилизатора на частоте качки.
Таким образом совокупность признаков предлагаемого устройства системы коррекции, реализация которых может быть выполнена в соответствии с фиг.1, позволяет повысить точность измерения ускорения силы тяжести гиростабилизированным гравиметром.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА КОРРЕКЦИИ ГИРОСТАБИЛИЗАТОРА МОРСКОГО ГРАВИМЕТРА | 2005 |
|
RU2277223C1 |
| СИСТЕМА КОРРЕКЦИИ ГИРОСТАБИЛИЗАТОРА МОРСКОГО ГРАВИМЕТРА | 2007 |
|
RU2332642C1 |
| СИСТЕМА КОРРЕКЦИИ ГИРОСТАБИЛИЗАТОРА МОРСКОГО ГРАВИМЕТРА | 2005 |
|
RU2282147C1 |
| СИСТЕМА КОРРЕКЦИИ | 2005 |
|
RU2282148C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВЕРТИКАЛЬНОЙ КАЧКИ СУДНА | 2001 |
|
RU2184675C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДЕФОРМАЦИЙ И УГЛОВ ОРИЕНТАЦИИ КОРАБЛЯ С УЧЕТОМ ДЕФОРМАЦИЙ | 2004 |
|
RU2261417C1 |
| ОДНООСНЫЙ СИЛОВОЙ ГИРОСТАБИЛИЗАТОР | 2008 |
|
RU2382331C1 |
| ГРАВИМЕТР ДЛЯ ИЗМЕРЕНИЯ СИЛЫ ТЯЖЕСТИ С ДВИЖУЩИХСЯ НОСИТЕЛЕЙ | 1993 |
|
RU2056643C1 |
| Гиростабилизированный кварцевый гравиметр и способ его калибровки | 2015 |
|
RU2619132C1 |
| ГРАВИМЕТР ДЛЯ ИЗМЕРЕНИЯ СИЛЫ ТЯЖЕСТИ С ДВИЖУЩИХСЯ НОСИТЕЛЕЙ | 1993 |
|
RU2056642C1 |
Изобретение предназначено для использования в составе двухосного гиростабилизатора морского гравиметра. Устройство содержит два идентичных канала, включает в каждом канале последовательно соединенные акселерометр, вычитатель, интегратор, апериодическое звено, изодромное устройство, второе апериодическое звено, датчик момента гироскопа. Выход апериодического звена посредством усилителя обратной связи соединен со вторым входом вычитателя. Выход акселерометра соединен также со входом фильтра верхних частот, выход которого посредством измерителя спектра соединен со входом управляющего устройства. Выход управляющего устройства соединен со вторым апериодическим звеном. Наличие вычитателя, интегратора, апериодического звена, усилителя обратной связи, выполняющих роль фильтра нижних частот второго порядка, эффективно сглаживающего высокочастотную составляющую сигнала акселерометра, обеспечивает увеличение точности стабилизации гравиметра, а следовательно, повышение точности измерения ускорения силы тяжести. Управляющее устройство изменяет постоянную времени апериодического звена в соответствии с изменением преобладающей частоты качки таким образом, что фазовый сдвиг между горизонтальными ускорениями качки и ошибкой стабилизации равен точно -270°, что в свою очередь увеличивает точность измерения ускорения силы тяжести гиростабилизированным гравиметром. 3 ил.
Система коррекции гиростабилизатора морского гравиметра, содержащая два идентичных канала, включающая в каждом канале акселерометр, апериодическое звено, изодромное устройство и датчик момента гироскопа, отличающаяся тем, что в каждый канал дополнительно введены интегратор, усилитель обратной связи, вычитатель, второе апериодическое звено, фильтр верхних частот, измеритель спектра, управляющее устройство, причем выход акселерометра связан с первым входом вычитателя, выход которого связан с входом интегратора, выход которого связан с входом апериодического звена, выход которого связан с входом усилителя обратной связи, выход которого связан со вторым входом вычитателя, выход апериодического звена связан также с входом изодромного устройства, выход которого связан с входом второго апериодического звена, выход которого связан с входом датчика момента гироскопа, кроме того, выход акселерометра связан со входом фильтра верхних частот, выход фильтра верхних частот посредством измерителя спектра связан с входом управляющего устройства, выход которого связан со вторым апериодическим звеном.
| РИВКИН С.С | |||
| и др | |||
| Гироскопическая стабилизация морских гравиметров | |||
| - М.: Наука, 1985, с.130-131 | |||
| РИВКИН С.С | |||
| Теория гироскопических устройств | |||
| Ч | |||
| II | |||
| - Л.: Судостроение, 1964, с.470 | |||
| ГРАВИМЕТР ДЛЯ ИЗМЕРЕНИЯ СИЛЫ ТЯЖЕСТИ С ДВИЖУЩИХСЯ НОСИТЕЛЕЙ | 1993 |
|
RU2056642C1 |
| RU 2191351 C1, 20.10.2003 | |||
| GB 1408636 A, 01.10.1975. | |||

