Изобретение относится к гироскопической технике, а более конкретно к гиростабилизаторам, работающим на подвижных объектах, выполняющим функцию инерциальной гировертикали, настроенной на период Шулера и предназначенной для стабилизации гравиметров.
Известно устройство системы коррекции инерциальной гировертикали [Самоткин Б.Б., Мелешко В.В., Степановский Ю.В. Навигационные приборы и системы. - Киев, Головное издательство издательского объединения "Выща школа", 1986, с.251-253], содержащее последовательно соединенные акселерометр, интегратор, сумматор и датчик момента гироскопа, при этом выполняется условие K1·K2·K3/H=1/R, где K1 - коэффициент передачи акселерометра, К2 - коэффициент передачи интегратора, К3 - коэффициент передачи цепи усилитель-датчик момента гироскопа, Н - кинетический момент гироскопа, R - радиус Земли. Кроме того, выход акселерометра соединен с входом усилителя прямой положительной связи, выход которого соединен с вторым входом сумматора. Наличие прямой положительной обратной связи, охватывающей интегратор, обеспечивает демпфирование собственных колебаний инерциальной гировертикали, но нарушает условие инвариантности по отношению к параметрам движения объекта.
Недостатком такой системы коррекции является нарушение условия инвариантности по отношению к параметрам движения объекта, что приводит к большой систематической ошибке измерения ускорения силы тяжести гиростабилизированным гравиметром из-за совместного влияния горизонтальных ускорений качки и наклонов гиростабилизированной площадки, а также "зашумление" линейной зоны сумматора, управляющего моментным датчиком гироскопа, при значительной амплитуде горизонтальных ускорений качки.
Наиболее близким (прототипом) является устройство системы коррекции инерциального гиростабилизатора [Самоткин Б.Б., Мелешко В.В., Степановский Ю.В. Навигационные приборы и системы. - Киев, Головное издательство издательского объединения "Выща школа", 1986, с.194-196], содержащее последовательно соединенные акселерометр, интегратор, усилитель и датчик момента гироскопа. При настройке устройства системы коррекции на период Шулера (выполнении условия K1·K2·K3/H=1/R, где K1 - коэффициент передачи акселерометра, К2 - коэффициент передачи интегратора, К3 - коэффициент передачи цепи усилитель-датчик момента гироскопа, Н - кинетический момент гироскопа, R - радиус Земли) инерциальная гировертикаль не возмущаема параметрами движения объекта, а следовательно, систематическая ошибка измерения ускорения силы тяжести гиростабилизированным гравиметром из-за совместного влияния горизонтальных ускорений качки и наклонов гиростабилизированной площадки равна нулю.
Недостатком такого устройства системы коррекции является то, что ошибки начальной выставки, возмущающие моменты в осях подвеса гироскопа и другие факторы приводят к незатухающим колебаниям гиростабилизированной площадки с периодом Шулера относительно вертикали. Это обуславливает большой уровень систематической ошибки гиростабилизированного гравиметра из-за наклонов основания.
Задачей изобретения является повышение точности измерения ускорения силы тяжести гиростабилизированным гравиметром.
Задача решается тем, что предлагаемое устройство системы коррекции гиростабилизатора морского гравиметра содержит акселерометр, интегратор, усилитель, датчик момента, полосовой фильтр-наблюдатель, компаратор, фиксатор переходов, схему управления, полосовой фильтр-измеритель, ключ, причем выход акселерометра соединен с первым входом интегратора, а также с входом полосового фильтра-наблюдателя, выход интегратора соединен с входом усилителя, а также с входом полосового фильтра-измерителя, выход усилителя соединен с входом датчика момента гироскопа. Выход полосового фильтра-наблюдателя соединен с входом компаратора, выход которого соединен с входом фиксатора переходов, выход фиксатора переходов соединен с входом схемы управления, второй выход которой соединен с вторым входом полосового фильтра-измерителя и соединен с вторым входом полосового фильтра-наблюдателя, а первый выход соединен с первым входом ключа, второй вход которого соединен с выходом полосового фильтра-измерителя. Выход ключа соединен с вторым входом интегратора.
На фиг.1 показана структурная схема системы коррекции гиростабилизатора морского гравиметра. На фиг.2 - 5 представлены графики, демонстрирующие работу системы коррекции гиростабилизатора морского гравиметра.
Выход акселерометра 1 соединен с входом интегратора 2, а также с входом полосового фильтра-наблюдателя 5, выход интегратора 2 соединен с входом усилителя 3, а также с входом полосового фильтра-измерителя 9, выход усилителя 3 соединен с входом датчика момента гироскопа 4. Выход полосового фильтра-наблюдателя 5 соединен с входом компаратора 6, выход компаратора 6 соединен с входом фиксатора переходов 7, выход фиксатора переходов 7 соединен с входом схемы управления 8, второй выход которой соединен с вторым входом полосового фильтра-измерителя 9 и соединен с вторым входом полосового фильтра-наблюдателя 5, первый выход схемы управления 8 соединен с первым входом ключа 10, второй вход ключа 10 соединен с выходом полосового фильтра-измерителя 9, выход ключа 10 соединен с вторым входом интегратора 2.
Работа устройства происходит следующим образом.
Сигнал с выхода акселерометра 1, пропорциональный ускорению движения объекта по отношению к Земле, подается на вход интегратора 2, с выхода которого сигнал поступает на усилитель 3 и далее на датчик момента гироскопа 4, что обеспечивает при выполнении условия K1·K2·K3/H=1/R, где K1 - коэффициент передачи акселерометра 1, К2 - коэффициент передачи интегратора 2, К3 - коэффициент передачи цепи усилитель 3 - датчик момента 4 гироскопа, Н - кинетический момент гироскопа, R - радиус Земли удержание в горизонте стабилизируемой площадки с гравиметром. Ошибки начальной выставки, возмущающие моменты в осях подвеса гироскопа и другие факторы приводят к возникновению незатухающих колебаний инерциальной вертикали относительно горизонта с периодом Шулера, что ухудшает точность стабилизации. Эти колебания измеряются акселерометром 1 в виде проекции ускорения силы тяжести и также интегрируются интегратором 2. Сигнал с выхода интегратора 2 подается на вход полосового фильтра-измерителя 9. Передаточная функция полосового фильтра-измерителя 9 имеет вид

где Т=806 с - постоянная времени маятника Шулера, k4=2 - коэффициент передачи полосового фильтра-измерителя 9, обеспечивающий значение амплитудно-частотной характеристики полосового фильтра-измерителя 9 на частоте Шулера, равное единице.
Полосовой фильтр-измеритель 9 выделяет переменную составляющую сигнала интегратора 2 с частотой Шулера и эффективно сглаживает составляющие, имеющие частоты, выше и ниже частоты Шулера. Сигнал на выходе полосового фильтра-измерителя 9 имеет нулевое отставание по фазе по отношению к выходному сигналу интегратора 2 на частоте Шулера в установившемся режиме и близкое к нулевому отставание по фазе по отношению к выходному сигналу интегратора 2 на частоте Шулера в процессе выхода на установившийся режим работы. Сигнал с выхода акселерометра 1 подается на вход полосового фильтра-наблюдателя 5, имеющего передаточную функцию

где Т=806 с - постоянная времени маятника Шулера.
Полосовой фильтр-наблюдатель 5 выделяет переменную составляющую сигнала акселерометра 1 с частотой Шулера и эффективно сглаживает составляющие, имеющие частоты, выше и ниже частоты Шулера. Сигнал на выходе полосового фильтра-наблюдателя 5 имеет нулевое отставание по фазе по отношению к выходному сигналу акселерометра 1 на частоте Шулера в установившемся режиме и близкое к нулевому отставание по фазе по отношению к выходному сигналу акселерометра 1 на частоте Шулера в процессе выхода на установившийся режим работы. Сигнал с выхода полосового фильтра-наблюдателя 5 подается на вход компаратора 6. На выходе компаратора 6 положительным значениям выходного сигнала полосового фильтра-наблюдателя 5 соответствует постоянный положительный уровень напряжения, а отрицательным значениям выходного сигнала полосового фильтра-наблюдателя 5 соответствует постоянный отрицательный уровень напряжения. Сигнал с выхода компаратора поступает на вход фиксатора переходов 7, который выдает сигнал на вход схемы управления 8 в момент смены знака на выходе компаратора 6. По сигналу с выхода фиксатора переходов 7 схема управления 8 обеспечивает срабатывание ключа 10. При этом выходной сигнал полосового фильтра-измерителя поступает на второй вход интегратора 2 и из текущего значения выходного сигнала интегратора 1 вычитается текущее значение выходного сигнала полосового фильтра-измерителя 9. Далее схема управления 8 обеспечивает приведение ключа 10 в исходное состояние "разомкнут" и установку текущего значения на выходе полосового фильтра-измерителя 9, равного нулю, а также установку текущего значения на выходе полосового фильтра-наблюдателя 5, равного нулю. При этом стабилизируемая площадка с гравиметром находится в окрестности горизонта, а на выходе интегратора 2 переменная составляющая с частотой Шулера оказывается скомпенсированной, что обеспечивает демпфирование собственных колебаний инерциальной вертикали, а следовательно, уменьшение ошибки гиростабилизированного гравиметра из-за наклонов основания. Параметрическая коррекция сигнала интегратора 2 не нарушает условие инвариантности по отношению к линейным ускорениям качки объекта, а следовательно, систематическая ошибка измерения ускорения силы тяжести гиростабилизированным гравиметром из-за совместного влияния горизонтальных ускорений качки и наклонов гиростабилизированной площадки равна нулю.
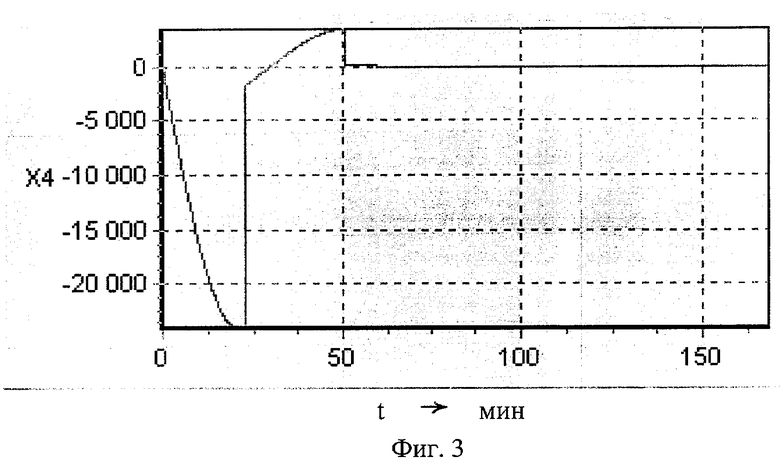
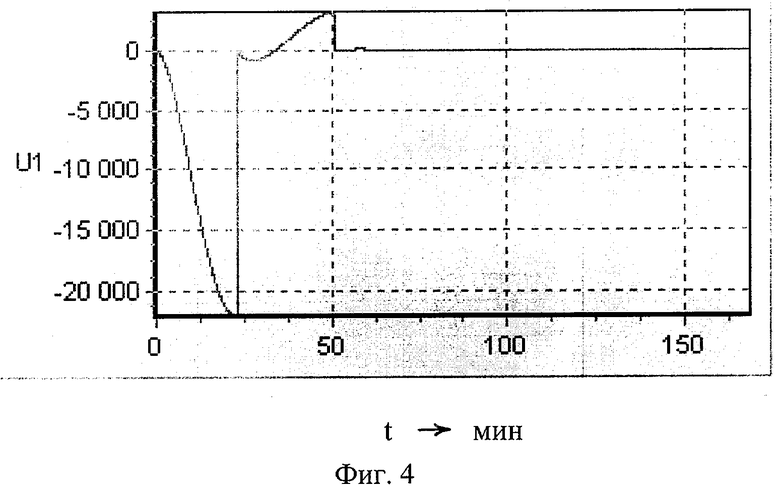
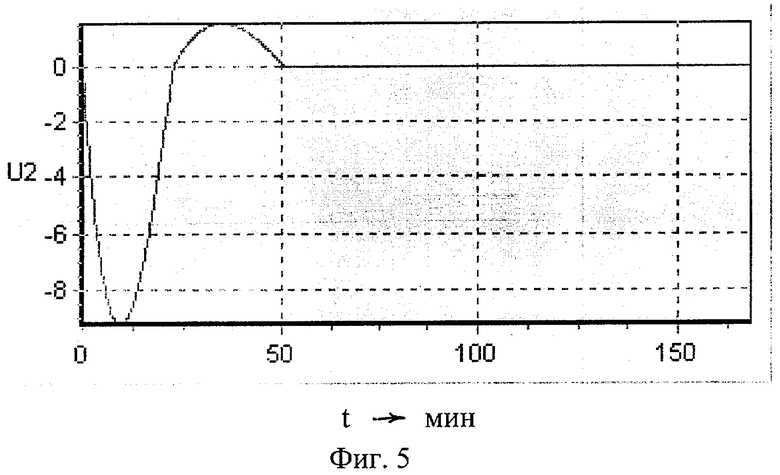
На фиг.2 - 5 представлены графики, демонстрирующие работу системы коррекции гиростабилизатора морского гравиметра. На фиг.2 представлена зависимость угла отклонения стабилизируемой площадки по отношению к горизонту от времени. На фиг.3 представлена зависимость Х4 - величины выходного сигнала интегратора 2 (в единицах цифрового кода) от времени. На фиг. 4 представлена зависимость U1 - величины выходного сигнала полосового фильтра-измерителя 9 (в единицах цифрового кода) от времени. На фиг.5 представлена зависимость U2 - величины выходного сигнала полосового фильтра-наблюдателя 5 ( в единицах цифрового кода) от времени. Моменты времени t1=22,9 мин, t2=51 мин, t3=59,7 мин, t4=85,4 мин соответствуют моментам смены знака на выходе компаратора 6 и параметрической коррекции сигнала интегратора 2. В момент времени t1=22,9 мин амплитуда отклонения гиростабилизированной площадки от горизонта уменьшается в восемь раз, а в процессе последующих циклов работы системы коррекции в момент времени t4=85,4 мин амплитуда отклонения гиростабилизированной площадки уменьшается уже в 30000 раз и составляет 0,00001 рад.
Таким образом, совокупность признаков предлагаемого устройства системы коррекции, реализация которых может быть выполнена в соответствии с фиг.1, позволяет повысить точность измерения ускорения силы тяжести гиростабилизированным гравиметром.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА КОРРЕКЦИИ ГИРОСТАБИЛИЗАТОРА МОРСКОГО ГРАВИМЕТРА | 2003 |
|
RU2244261C1 |
| СИСТЕМА КОРРЕКЦИИ ГИРОСТАБИЛИЗАТОРА МОРСКОГО ГРАВИМЕТРА | 2005 |
|
RU2277223C1 |
| СИСТЕМА КОРРЕКЦИИ ГИРОСТАБИЛИЗАТОРА МОРСКОГО ГРАВИМЕТРА | 2007 |
|
RU2332642C1 |
| Способ построения инерциальных демпфированных систем с произвольным периодом, инвариантных по отношению к маневрированию, и устройство для его осуществления | 2015 |
|
RU2616087C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 1990 |
|
RU2016383C1 |
| ОДНООСНЫЙ СИЛОВОЙ ГИРОСТАБИЛИЗАТОР | 2008 |
|
RU2382331C1 |
| СПОСОБ КОМПЛЕКСИРОВАНИЯ ИНЕРЦИАЛЬНЫХ НАВИГАЦИОННЫХ СИСТЕМ И КОМБИНИРОВАННАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1993 |
|
RU2082098C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ И КОМПЕНСАЦИИ УХОДА ГИРОСТАБИЛИЗИРОВАННОЙ ПЛАТФОРМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2285902C1 |
| СИСТЕМА КОРРЕКЦИИ | 2005 |
|
RU2282148C1 |
| СПОСОБ СТАБИЛИЗАЦИИ ПО КРЕНУ ИНЕРЦИАЛЬНОЙ ПЛАТФОРМЫ ДЛЯ БЫСТРОВРАЩАЮЩИХСЯ ОБЪЕКТОВ И СТАБИЛИЗИРОВАННАЯ ПО КРЕНУ ИНЕРЦИАЛЬНАЯ ПЛАТФОРМА | 2003 |
|
RU2256882C2 |

Изобретение предназначено для использования в составе гиростабилизатора морского гравиметра. Система коррекции гиростабилизатора морского гравиметра содержит акселерометр, интегратор, усилитель, датчик момента, полосовой фильтр-наблюдатель для выделения переменной составляющей сигнала акселерометра с частотой Шулера, компаратор, фиксатор переходов, схему управления, полосовой фильтр-измеритель для выделения переменной составляющей сигнала интегратора с частотой Шулера, ключ, причем выход акселерометра соединен с первым входом интегратора, а также с входом полосового фильтра-наблюдателя, выход интегратора соединен с входом усилителя, а также с входом полосового фильтра-измерителя, выход усилителя соединен с входом датчика момента гироскопа. Выход полосового фильтра-наблюдателя соединен с входом компаратора, выход которого соединен с входом фиксатора переходов, выход фиксатора переходов соединен с входом схемы управления, второй выход которой соединен с вторым входом полосового фильтра-измерителя и соединен с вторым входом полосового фильтра-наблюдателя, а первый выход соединен с первым входом ключа, второй вход которого соединен с выходом полосового фильтра-измерителя. Выход ключа соединен с вторым входом интегратора. Техническим результатом является повышение точности измерения ускорения силы тяжести гиростабилизированным гравиметром. 5 ил.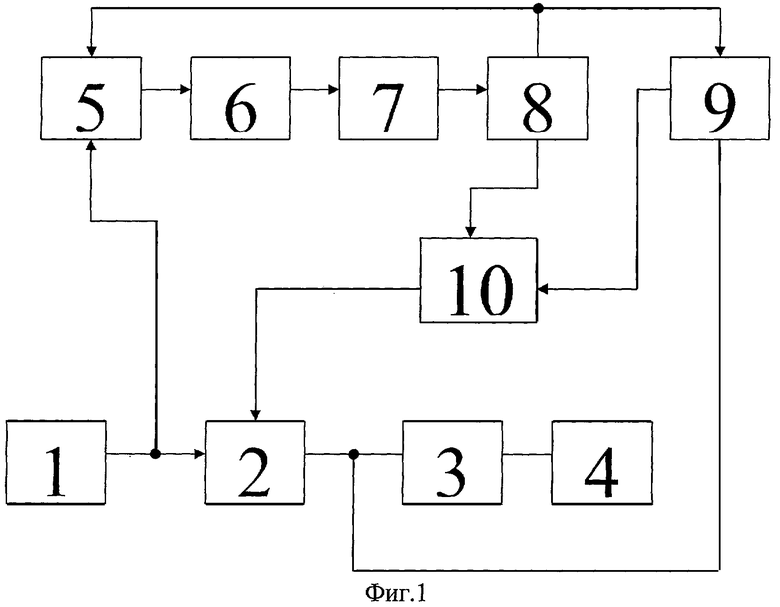
Система коррекции гиростабилизатора морского гравиметра, содержащая последовательно соединенные акселерометр, интегратор, усилитель, датчик момента гироскопа, отличающаяся тем, что в нее дополнительно введены полосовой фильтр-наблюдатель для выделения переменной составляющей сигнала акселерометра с частотой Шулера, компаратор, фиксатор переходов, схема управления, полосовой фильтр-измеритель для выделения переменной составляющей сигнала интегратора с частотой Шулера, ключ, причем выход акселерометра соединен с входом полосового фильтра-наблюдателя, выход интегратора соединен с входом полосового фильтра-измерителя, выход полосового фильтра-наблюдателя соединен с входом компаратора, выход которого соединен с входом фиксатора переходов, выход фиксатора переходов соединен с входом схемы управления, второй выход которой соединен с вторым входом полосового фильтра-измерителя и соединен с вторым входом полосового фильтра-наблюдателя, а первый выход соединен с первым входом ключа, второй вход ключа соединен с выходом полосового фильтра-измерителя, выход ключа соединен с вторым входом интегратора.
| САМОТКИН Б.И | |||
| и др | |||
| Навигационные приборы и системы | |||
| - Киев: Головное издательство издательского объединения "Выща школа", 1986, с.194-196, 251-253 | |||
| СИСТЕМА КОРРЕКЦИИ ГИРОСТАБИЛИЗАТОРА МОРСКОГО ГРАВИМЕТРА | 2003 |
|
RU2244261C1 |
| Гиростабилизатор морского гравиметра | 1974 |
|
SU565268A1 |
| RU 2191351 C1, 20.10.2001 | |||
| US 3633003 А, 04.01.1972. | |||

