Изобретение относится к приборам, измеряющим вертикальное перемещение судна на качке. Такие приборы используются для компенсации влияния качки на работу ряда устройств и систем, используемых на надводных и подводных объектах, таких как:
- гравиметры;
- однолучевые и многолучевые эхолоты;
- профилографы;
- гидролокаторы бокового обзора;
- антенны гидроакустических систем слежения за автономными подводными объектами;
- лазерные устройства для измерения параметров состояния поверхности океана и атмосферы;
- некоторые разновидности антенн радиолокационных станций, систем спутниковой связи и спутникового телевидения;
- автономные буи для исследования экологии океана;
- гидроакустические приборы в буксируемых необитаемых подводных аппаратах.
Рассматриваемые датчики вертикальной качки относятся к группе устройств, в которых сигнал, пропорциональный вертикальному перемещению, получается в результате двукратного интегрирования сигнала, пропорционального вертикальному ускорению.
Известно устройство для измерения вертикальной качки (патент Германии №2803635), состоящее из вертикально расположенного акселерометра, выход которого соединен с последовательно включенными первым и вторым интеграторами на апериодических усилителях. С целью компенсации постоянной составляющей сигнала на выходе акселерометра выход второго интегратора соединен через интегро-дифференцирующий усилитель обратной связи с входом первого интегратора. Такая схема образует колебательное звено с большой постоянной времени. Величина постоянной времени колебательного звена выбирается так, чтобы для минимальной частоты качки (0.05 Гц) фазовый сдвиг выходного сигнала относительно входного приближался к 180 градусам.
Недостатком такого устройства является то, что в случае выведения его из установившегося режима, в нем возникает длительный переходный процесс, обусловленный большой постоянной времени звена, состоящего из двух апериодических усилителей, охваченных интегро-дифференцирующей обратной связью.
Наиболее близким является устройство для измерения вертикальной качки судна, патент РФ №2184675. Оно содержит вертикально расположенный акселерометр, вычитатель, первое и второе апериодические звенья, интегратор обратной связи, измеритель спектра и управляющее устройство, причем выход акселерометра связан с входом первого апериодического звена, выход которого связан с первым входом вычитателя, выход вычитателя связан с вторым апериодическим звеном, выход которого связан с интегратором обратной связи, а выход интегратора обратной связи - с вторым входом вычитателя, кроме того, выход акселерометра посредством измерителя спектра связан с входом управляющего устройства, один из выходов которого связан с первым апериодическим звеном, а второй - с интегратором обратной связи.
Недостатком прототипа является то, что изменение в процессе работы постоянных времени апериодического и колебательного звена является дополнительным возмущающим фактором. Поэтому в системе возникает переходный процесс, во время которого погрешность интегрирования значительно превышает заданные пределы.
Задачей предлагаемого устройства является повышение точности измерения вертикального перемещения судна.
Предлагаемое устройство для измерения вертикальной качки судна содержит вертикально расположенный акселерометр, схемы двойного интегрирования, измеритель спектра, коммутатор каналов, управляющее устройство, причем выход вертикально расположенного акселерометра соединен с входами схем двойного интегрирования, выходы которых подключены к информационным входам коммутатора каналов, кроме того, выход акселерометра соединен с входом устройства вычисления максимума спектра, выход которого посредством управляющего устройства соединен с управляющим входом коммутатора каналов.
Сущность предлагаемого изобретения заключается в том, что измеритель спектра определяет преобладающую частоту качки по сигналу акселерометра. Сигнал, пропорциональный преобладающей частоте качки, с выхода устройства измерения спектра поступает на вход управляющего устройства, которое в соответствии с текущим значением преобладающей частоты качки подключает к выходу коммутатора каналов один из выходных сигналов схем двойного интегрирования (информационных входов коммутатора каналов). Причем подключается сигнал от той схемы двойного интегрирования, параметры которой оптимальны для данной преобладающей частоты качки. Схемы двойного интегрирования работают параллельно и независимо друг от друга. Поэтому в отличие от прототипа, где изменяются параметры схемы двойного интегрирования, при переключении коммутатора каналов не возникает переходного процесса, так как параметры каждой схемы двойного интегрирования постоянны.
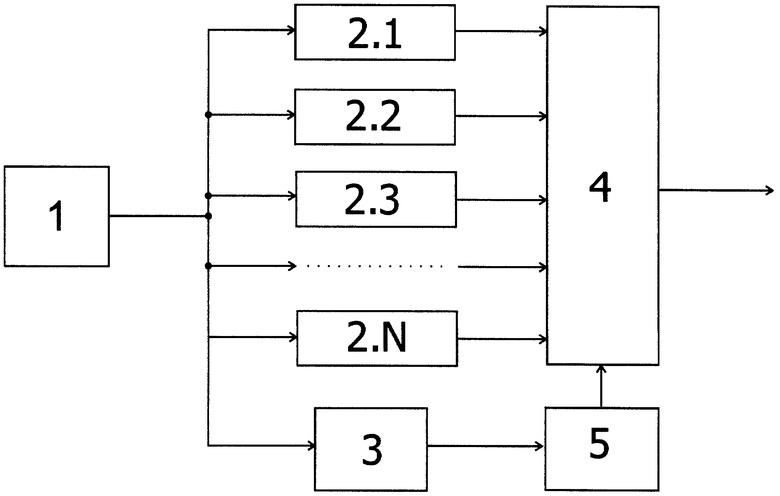
На чертеже показана структурная схема устройства для измерения вертикальной качки судна.
Устройство для измерения вертикальной качки судна содержит вертикально расположенный акселерометр 1, схемы двойного интегрирования 2.1, 2.2, 2.3,...2.N, устройство вычисления максимума спектра 3, коммутатор каналов 4, управляющее устройство 5, причем выход вертикально расположенного акселерометра 1 соединен с входами схем двойного интегрирования 2.1, 2.2, 2.3,...2.N, выходы которых подключены к информационным входам коммутатора каналов 4, кроме того, выход акселерометра соединен с входом устройства вычисления максимума спектра 3, выход которого посредствам управляющего устройства 5 соединен с управляющим входом коммутатора каналов 4.
Работа устройства происходит следующим образом. Акселерометр 1 ориентируется по вертикали места с помощью гировертикали или бесплатформенной системы ориентации. При возникновении вертикальной качки на его выходе появляется сигнал, пропорциональный вертикальному ускорению. Этот сигнал поступает на входы схем двойного интегрирования 2.1, 2.2, 2.3,...2.N, каждая из которых обеспечивает требуемый фазовый сдвиг и время переходного процесса сигнала на возможных преобладающих частотах качки судна (каждая схема настроена на определенную преобладающую частоту качки). На выходах схем двойного интегрирования 2.1, 2.2, 2.3,...2.N появляется сигнал, пропорциональный вертикальному перемещению судна, который поступает на информационные входы коммутатора каналов 4.
С выхода акселерометра 1 сигнал поступает также на вход устройства измерения спектра 3, в котором определяется преобладающая частота качки. Сигнал, пропорциональный преобладающей частоте качки, с выхода устройства измерения спектра 3 поступает на вход управляющего устройства 5, которое в соответствии с текущим значением преобладающей частоты качки подключает к выходу коммутатора каналов 4 один из выходных сигналов схем двойного интегрирования 2.1, 2.2, 2.3,...2.N, причем подключается сигнал от той схемы двойного интегрирования параметры которой оптимальны для данной преобладающей частоты качки. Схемы двойного интегрирования 2.1, 2.2, 2.3,...2.N работают параллельно и независимо друг от друга. Поэтому в отличие от прототипа, где изменяются параметры схемы двойного интегрирования, при переключении коммутатора каналов 4 не возникает переходного процесса, так как параметры каждой схемы двойного интегрирования постоянны.
Таким образом, совокупность признаков предлагаемого устройства, реализация которых может быть выполнена в соответствии с чертежом, позволяет повысить динамическую устойчивость системы к импульсным воздействиям, возникающим, в частности, при ударах волны о борт судна, а так же при изменении его скорости движения. Устройство может быть реализовано в виде электронной схемы или (предпочтительно) в виде программы, работающей в реальном масштабе времени.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВЕРТИКАЛЬНОЙ КАЧКИ СУДНА | 2001 |
|
RU2184675C1 |
| СИСТЕМА КОРРЕКЦИИ ГИРОСТАБИЛИЗАТОРА МОРСКОГО ГРАВИМЕТРА | 2007 |
|
RU2332642C1 |
| СИСТЕМА КОРРЕКЦИИ ГИРОСТАБИЛИЗАТОРА МОРСКОГО ГРАВИМЕТРА | 2003 |
|
RU2244261C1 |
| СИСТЕМА КОРРЕКЦИИ ГИРОСТАБИЛИЗАТОРА МОРСКОГО ГРАВИМЕТРА | 2005 |
|
RU2277223C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ МОРСКИХ ВОЛН С БОРТА ДВИЖУЩЕГОСЯ СУДНА | 2014 |
|
RU2563314C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДЕФОРМАЦИЙ И УГЛОВ ОРИЕНТАЦИИ КОРАБЛЯ С УЧЕТОМ ДЕФОРМАЦИЙ | 2004 |
|
RU2261417C1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВОЛНЕНИЯ | 2008 |
|
RU2384861C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ МОРСКИХ ВОЛН С БОРТА ДВИЖУЩЕГОСЯ СУДНА | 2010 |
|
RU2439494C1 |
| СИСТЕМА КОРРЕКЦИИ | 2005 |
|
RU2282148C1 |
| СПУСКОПОДЪЕМНОЕ УСТРОЙСТВО | 2010 |
|
RU2445230C2 |
Изобретение относится к приборам, измеряющим вертикальное перемещение судна на качке. Такие приборы используются для компенсации влияния качки на работу однолучевых и многолучевых эхолотов, а также ряда других устройств и систем, используемых на надводных и подводных объектах. Устройство содержит линейный акселерометр, ориентированный вертикально, устройство вычисления максимума спектра и управляющее устройство, а также коммутатор каналов и схемы двойного интегрирования с постоянными параметрами, причем выход вертикально расположенного акселерометра соединен с входами схем двойного интегрирования, выходы которых подключены к информационным входам коммутатора каналов, кроме того, выход акселерометра соединен с входом устройства вычисления максимума спектра, выход которого посредством управляющего устройства соединен с управляющим входом коммутатора каналов. Управляющее устройство в соответствии с текущим значением преобладающей частоты качки подключает к выходу коммутатора каналов один из выходных сигналов схем двойного интегрирования, причем подключается сигнал от той схемы двойного интегрирования, параметры которой оптимальны для данной преобладающей частоты качки. Схемы двойного интегрирования работают параллельно и независимо друг от друга. Поэтому при переключении коммутатора каналов не возникает переходного процесса, так как параметры каждой схемы двойного интегрирования постоянны. Технический результат - повышение точности интегрирования и динамической устойчивости измерителя вертикальной качки к воздействиям, возникающим, в частности, при изменении преобладающей частоты качки судна, а так же при изменении его скорости движения. 1 ил.
Устройство для измерения вертикальной качки судна, содержащее вертикально расположенный акселерометр, измеритель спектра, управляющее устройство, отличающееся тем, что в него дополнительно введены коммутатор и схемы двойного интегрирования, каждая из которых настроена на определенную частоту качки, причем выход вертикально расположенного акселерометра соединен с входами схем двойного интегрирования, выходы которых подключены к информационным входам коммутатора, кроме того, выход акселерометра соединен с входом измерителя спектра, выход которого посредством управляющего устройства, соединен с управляющим входом коммутатора.
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВЕРТИКАЛЬНОЙ КАЧКИ СУДНА | 2001 |
|
RU2184675C1 |
| Способ лапароскопического моделирования некротического энтероколита | 2023 |
|
RU2803635C1 |
| RU 2075040 С1, 10.03.1997 | |||
| US 4986121 А, 22.01.1991 | |||
| US 4104608 А, 01.08.1978 | |||
| US 4004460 А, 25.01.1977. | |||

