Предлагаемый амортизатор относится к устройствам виброзащитной техники и предназначен для защиты от вибрации различных объектов, в частности может использоваться в сиденьях тракторов, дорожных и сельскохозяйственных машин для защиты человека-оператора от широкополосного случайного кинематического возмущения.
Известен амортизатор [1] , содержащий несущий упругий элемент, закрепляемый между основаниями, первое из которых предназначено для соединения с объектом виброзащиты, а второе с источником вибрации, релейный элемент, датчик скорости, установленный на первом основании и подключенный к входу релейного элемента, и размещенный на первом основании управляемый затвор с электроклапаном, выполненный в виде гидравлического цилиндра с поршнем и штоком, причем над- и подпоршневые полости гидравлического цилиндра соединены каналом, электроклапан встроен в канал и электрически связан с выходом релейного элемента, а на выходном конце штока закреплена опорная шайба.
Использование релейного элемента не позволяет реализовать оптимальное управление процессом переключения жесткости, что существенно снижает эффективность работы такого амортизатора.
Наиболее близким к предлагаемому амортизатору по технической сущности и достигаемому результату является амортизатор [2], содержащий несущий упругий элемент, закрепляемый между основаниями, первое из которых предназначено для соединения с объектом виброзащиты, а второе с источником вибрации, блок управления, первый датчик скорости, установленный на первом основании и подключенный к первому входу блока управления, и управляемый затвор с электроклапаном, выполненный в виде гидравлического цилиндра с поршнем и штоком, причем над- и подпоршневые полости гидравлического цилиндра соединены каналом, электроклапан встроен в канал и электрически связан с выходом блока управления, а на выходном конце штока закреплена опорная шайба.
Наличие датчика скорости, установленного на первом основании, позволяет отслеживать только изменение абсолютной скорости объекта виброзащиты. Однако этого не достаточно для реализации оптимального управления процессом переключений жесткости при кинематическом возмущении, поскольку дополнительно необходима информация об изменении относительной скорости объекта виброзащиты. Кроме того, в момент открытия электроклапана деформации заблокированной и рабочей части несущего упругого элемента различны и поэтому в процессе выравнивания деформаций возникают собственные затухающие колебания несущего упругого элемента и штока, которые передаются на объект виброзащиты. Все это не позволяет обеспечить эффективную виброзащиту при кинематическом возмущении.
Целью изобретения является повышение виброзащитных свойств амортизатора за счет обеспечения оптимального управления процессом переключения жесткости и исключения при этом передачи на объект виброзащиты собственных затухающих колебаний системы упругий элемент - шток.
Для этого амортизатор, содержащий несущий упругий элемент, закрепляемый между основаниями, первое из которых предназначено для соединения с объектом виброзащиты, а второе - с источником вибрации, блок управления, первый датчик скорости, установленный на первом основании и подключенный к первому входу блока управления, и управляемый затвор с электроклапаном, выполненный в виде гидравлического цилиндра с поршнем и штоком, причем над- и подпоршневые полости гидравлического цилиндра соединены каналом, электроклапан встроен в канал и электрически связан с выходом блока управления, а на выходном конце штока закреплена опорная шайба, снабжен дополнительным упругим элементом и вторым датчиком скорости, причем управляемый затвор установлен на первом основании, дополнительный упругий элемент закреплен между опорной шайбой и вторым основанием, а второй датчик скорости установлен на втором основании и подключен ко второму входу блока управления.
На чертеже изображен общий вид амортизатора.
Амортизатор содержит первое основание 1, предназначенное для связи с объектом виброзащиты 2, второе основание 3, предназначенное для связи с источником вибрации 4, несущий упругий элемент 5, закрепленный между первым и вторым основаниями 1, 3, дополнительный упругий элемент 6, блок управления 7, первый датчик скорости 8, установленный на первом основании 1 и подключенный к первому входу блока управления 7, второй датчик скорости 9, установленный на втором основании 3 и подключенный ко второму входу блока управления 7, и размещенный на первом основании 1 управляемый затвор 10.
Управляемый затвор 10, в гидравлическом исполнении, включает цилиндр 11, поршень 12 с выходным штоком 13, на выходном конце которого закреплена опорная шайба 14, канал 15, соединяющий над- и подпоршневую полость цилиндра 11, и электроклапан 16, встроенный в канал 15 и электрически связанный с выходом блока управления 7.
Дополнительный упругий элемент 6 закреплен между опорной шайбой 14 и вторым основанием 3.
Шток 13 и дополнительный упругий элемент 6 располагаются параллельно несущему упругому элементу 5.
Амортизатор работает следующим образом.
В процессе кинематического возмущения, исходящего от источника вибрации 4, первое и второе основание 1, 3 взаимно перемещаются. Восстанавливающая сила, действующая на первое основание 1, формируется несущим упругим элементом 5 и дополнительным упругим элементом 6. Скорости первого и второго оснований 1, 3 отслеживаются датчиками скорости 8 и 9, которые генерируют пропорциональные соответствующим скоростям электрические сигналы U1 и U2.
Сигнал U1 подается на первый вход блока управления 7, а сигнал U2 - на второй вход блока управления 7.
Блок управления 7 сравнивает по величине и знаку сигналы U1, U2 и формирует управляющий сигнал
который подается на электроклапан 16.
Если управляющий сигнал U = U0, то электроклапан 16 срабатывает и открывает канал 15 управляемого затвора 10. Рабочая жидкость не препятствует перемещению поршня 12 и перетекает по каналу 15 из одной полости гидроцилиндра 11 в другую. Поршень 12 со штоком 13 под действием восстанавливающей силы дополнительного упругого элемента 6 свободно перемещается относительно первого основания 1. В результате этого дополнительный упругий элемент 6 выключен из работы и восстанавливающая сила, действующая на первое основание 1, формируется только несущим упругим элементом 5.
Если управляющий сигнал U=0, то электроклапан 16 обесточивается и перекрывает канал 15 управляемого затвора 10. Рабочая жидкость не перетекает по каналу 15 из одной полости гидроцилиндра 11 в другую и, как следствие, положение поршня 12 и штока 13 фиксируется относительно первого основания 1. В результате этого дополнительный упругий элемент 6 включен в работу и восстанавливающая сила, действующая на первое основание 1, формируется как несущим упругим элементом 5, так и дополнительным упругим элементом 6.
При включении в работу дополнительного упругого элемента 6 направление его восстанавливающей силы зависит от знака относительной скорости  Если
Если  то дополнительный упругий элемент 6 растягивается, и восстанавливающая сила направлена вниз. В противном случае, если
то дополнительный упругий элемент 6 растягивается, и восстанавливающая сила направлена вниз. В противном случае, если  то дополнительный упругий элемент 6 сжимается, и восстанавливающая сила направлена вверх.
то дополнительный упругий элемент 6 сжимается, и восстанавливающая сила направлена вверх.
В процессе работы амортизатора следует выделить четыре периодически повторяющихся априорных ситуаций.
Во-первых, рассмотрим случай, когда скорость первого основания 1 положительна  . Тогда, если относительная скорость
. Тогда, если относительная скорость  то управляющий сигнал U= U0 и дополнительный упругий элемент 6 выключен из работы. В результате жесткость амортизатора минимальна и скорость первого основания 1 увеличивается только за счет действия восстанавливающей силы несущего упругого элемента 5. Если же относительная скорость
то управляющий сигнал U= U0 и дополнительный упругий элемент 6 выключен из работы. В результате жесткость амортизатора минимальна и скорость первого основания 1 увеличивается только за счет действия восстанавливающей силы несущего упругого элемента 5. Если же относительная скорость  то управляющий сигнал U=0 и дополнительный упругий элемент 6 включен в работу. При этом жесткость амортизатора максимальна. На первое основание 1, кроме восстанавливающей силы несущего упругого элемента 5, начинает действовать направленная против ее движения восстанавливающая сила дополнительного упругого элемента 6. В результате скорость первого основания 1, а следовательно, и скорость объекта 2 уменьшаются.
то управляющий сигнал U=0 и дополнительный упругий элемент 6 включен в работу. При этом жесткость амортизатора максимальна. На первое основание 1, кроме восстанавливающей силы несущего упругого элемента 5, начинает действовать направленная против ее движения восстанавливающая сила дополнительного упругого элемента 6. В результате скорость первого основания 1, а следовательно, и скорость объекта 2 уменьшаются.
Во-вторых, рассмотрим случай, когда скорость первого основания 1 отрицательна  Тогда, если относительная скорость
Тогда, если относительная скорость  то управляющий сигнал U=U0 и дополнительный упругий элемент 6 выключены из работы. В результате жесткость амортизатора минимальна и скорость первого основания 1 увеличивается только за счет действия восстанавливающей силы несущего упругого элемента 5. Если же относительная скорость
то управляющий сигнал U=U0 и дополнительный упругий элемент 6 выключены из работы. В результате жесткость амортизатора минимальна и скорость первого основания 1 увеличивается только за счет действия восстанавливающей силы несущего упругого элемента 5. Если же относительная скорость  то управляющий сигнал U=0 и дополнительный упругий элемент 6 включены в работу. При этом жесткость амортизатора максимальна. На первое основание 1, кроме восстанавливающей силы несущего упругого элемента 5, начинает действовать направленная против ее движения восстанавливающая сила дополнительного упругого элемента 6. В результате скорость первого основания 1, а следовательно, и скорость объекта 2 уменьшаются.
то управляющий сигнал U=0 и дополнительный упругий элемент 6 включены в работу. При этом жесткость амортизатора максимальна. На первое основание 1, кроме восстанавливающей силы несущего упругого элемента 5, начинает действовать направленная против ее движения восстанавливающая сила дополнительного упругого элемента 6. В результате скорость первого основания 1, а следовательно, и скорость объекта 2 уменьшаются.
Наличие второго датчика скорости 9, установленного на втором основании 3, позволяет отслеживать изменение абсолютной скорости источника вибрации 4, и по совокупности поступающей на блок управления 7 информации обеспечить формирование оптимального управляющего сигнала.
Снабжение амортизатора дополнительным упругим элементом 6, который через опорную шайбу 14 связан со штоком 13 и поршнем 12 управляющего затвора 10, позволяет реализовать оптимальное управление процессом переключений жесткости - дополнительный упругий элемент 6 включается в работу только тогда, когда его восстанавливающая сила уменьшает абсолютную скорость первого основания 1. Кроме того, поскольку при открытом канале 15 рабочая жидкость не препятствует перемещению поршня 12 относительно гидроцилиндра 11, то выключение из работы дополнительного упругого элемента 6 не приводит к передаче свободных затухающих колебаний системы дополнительный упругий элемент - шток - поршень на первое основание 1 и соответственно на объект виброзащиты 2.
Все это существенно повышает виброзащитные свойства амортизатора.
Источники информации
1. Авторское свидетельство СССР 621916, кл. F 16 F 9/06, БИ 32, 1975.
2. Авторское свидетельство 771380, кл. F 16 F 9/06, БИ 38, 1980. (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| АМОРТИЗАТОР | 2002 |
|
RU2234015C1 |
| ДВУХКАМЕРНЫЙ ПНЕВМАТИЧЕСКИЙ АМОРТИЗАТОР | 1998 |
|
RU2139458C1 |
| АМОРТИЗАТОР ПРЕРЫВИСТОГО ДЕЙСТВИЯ | 1999 |
|
RU2150622C1 |
| ДИНАМИЧЕСКИЙ ГАСИТЕЛЬ | 2008 |
|
RU2374520C1 |
| ВИБРОИЗОЛЯТОР | 2008 |
|
RU2382254C1 |
| АМОРТИЗАТОР | 2003 |
|
RU2247881C1 |
| ГИДРАВЛИЧЕСКИЙ ДЕМПФЕР | 1999 |
|
RU2165550C2 |
| ГИДРАВЛИЧЕСКИЙ ДЕМПФЕР | 1998 |
|
RU2196262C2 |
| СПОСОБ ГАШЕНИЯ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2412388C2 |
| ПНЕВМАТИЧЕСКИЙ ДЕМПФЕР | 1994 |
|
RU2086827C1 |
Изобретение относится к машиностроению и устройствам виброзащитной техники и может использоваться в транспортном машиностроении для защиты человека-оператора от широкополосного случайного кинематического возмущения. Основными элементами конструкции амортизатора являются два основания, несущий упругий элемент, закрепленный между обоими основаниями, дополнительный упругий элемент, блок управления, два датчика скорости, установленные на этих основаниях и подключенные к соответствующим входам блока управления. Технический результат заключается в том, что заявленный амортизатор реализует оптимальный управляемый процесс переключений жесткости - дополнительный упругий элемент включается в работу только тогда, когда его восстанавливающая сила уменьшает абсолютную скорость первого основания. 1 ил.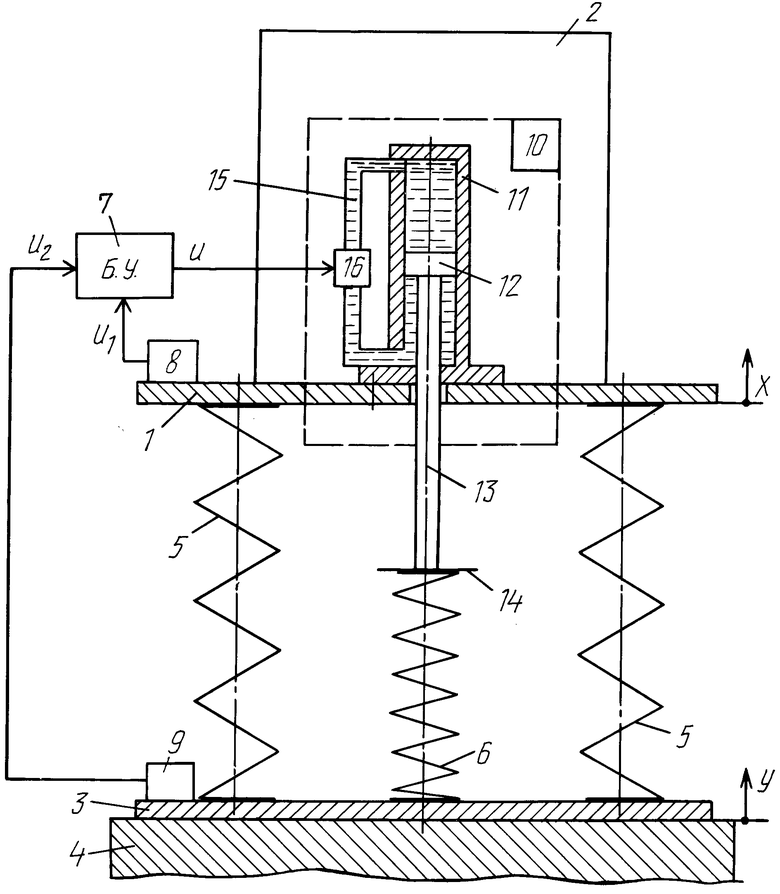
Амортизатор, содержащий несущий упругий элемент, закрепляемый между основаниями, первое из которых предназначено для соединения с объектом виброзащиты, а второе - с источником вибрации, блок управления, первый датчик скорости, установленный на первом основании и подключенный к первому входу блока управления, и управляемый затвор с электроклапаном, выполненный в виде гидравлического цилиндра с поршнем и штоком, причем над- и подпоршневые полости гидравлического цилиндра соединены каналом, электроклапан встроен в канал и электрически связан с выходом блока управления, а на выходном конце штока закреплена опорная шайба, отличающийся тем, что он снабжен дополнительным упругим элементом и вторым датчиком скорости, причем управляемый затвор установлен на первом основании, дополнительный упругий элемент закреплен между опорной шайбой и вторым основанием, а второй датчик скорости установлен на втором основании и подключен ко второму входу блока управления.
| Амортизатор | 1978 |
|
SU771380A1 |
| RU 2060417, 20.05.1996 | |||
| Амортизатор | 1975 |
|
SU621916A1 |
| ИНТРАОРАЛЬНЫЙ ЭНДОСКОП | 2021 |
|
RU2773600C1 |
