Виброизолятор относится к устройствам виброзащитной техники и предназначен для защиты объектов от силового воздействия, в частности, может использоваться в мостовых кранах для уменьшения динамических нагрузок (реакций), воспринимаемых несущими конструкциями.
Известен виброизолятор [1], содержащий первое основание, предназначенное для связи с источником динамических нагрузок, второе основание, предназначенное для связи с объектом, несущий упругий элемент и инерционный демпфер, закрепляемые между основаниями, и корректор жесткости, выполненный в виде закрепленной на втором основании П-образной рамы, внутри которой установлены две пружины, связанные с инерционным демпфером.
Минимальная суммарная жесткость несущего упругого элемента и пружин корректора жесткости обеспечивается только при определенном - настраиваемом - среднем (пороговом) значении действующей силы. Если же пороговое значение силы отличается от настраиваемого, то суммарная жесткость виброизолятора повышается и эффективность защиты объекта от периодической составляющей силы снижается. Кроме того, инерционный демпфер постоянно включен в работу, и через него периодическая составляющая силы воздействует на второе основание и соответственно на объект.
Наиболее близким к предлагаемому виброизолятору по технической сущности и достигаемому результату является виброизолятор [2], содержащий первое основание, предназначенное для связи с источником динамических нагрузок, второе основание, предназначенное для связи с объектом, несущий упругий элемент и демпфер, закрепляемые между основаниями, блок управления, корректор жесткости, состоящий из гидравлического цилиндра с поршнем и штоком и двух пружин, устанавливаемых внутри П-образной рамы, и датчик перемещения, установленный на первом основании и подключенный к входу блока управления, причем над- и подпоршневые полости гидравлического цилиндра соединены каналом со встроенным первым электроклапаном, подключенным к первому выходу блока управления.
Недостатком данного виброизолятора является то, что при действии периодической силы снижение суммарной жесткости несущего упругого элемента и пружин обеспечивается только при трех переключениях корректора жесткости за период изменения силы. При такой интенсивной работе виброизолятора, когда пружины корректора жесткости поочередно формируют компенсационное воздействие, снижающее динамические нагрузки, воспринимаемые объектом, повышается вероятность отказа системы управления. Причем через демпфер, который включается в работу и выключается из работы одновременно с корректором жесткости, периодическая составляющая силы передается на второе основание и соответственно на объект. Все это снижает надежность виброизолятора и эффективность защиты объектов от силового воздействия.
Задача, на решение которой направлено изобретение, состоит в повышении надежности виброизолятора и эффективности защиты объектов от силового воздействия посредством уменьшения числа переключений корректора жесткости.
Для этого виброизолятор, содержащий первое основание, предназначенное для связи с источником динамических нагрузок, второе основание, предназначенное для связи с объектом, несущий упругий элемент и демпфер, закрепляемые между основаниями, блок управления, корректор жесткости, состоящий из гидравлического цилиндра с поршнем и штоком и двух пружин, устанавливаемых внутри П-образной рамы, и датчик перемещения, установленный на первом основании и подключенный к входу блока управления, причем над- и подпоршневые полости гидравлического цилиндра соединены каналом со встроенным первым электроклапаном, подключенным к первому выходу блока управления, дополнительно снабжен электромагнитом, закрепленном на П-образной раме, демпфер выполнен в виде гофрированного цилиндра, в торце которого установлен дроссель и встроен второй электроклапан, причем шток шарнирно закреплен на первом основании, а концы пружин - на корпусе гидравлического цилиндра и на П-образной раме, сердечник электромагнита соединен стержнем с корпусом гидравлического цилиндра, второй электроклапан подключен ко второму выходу блока управления, а электромагнит подключен к третьему выходу блока управления.
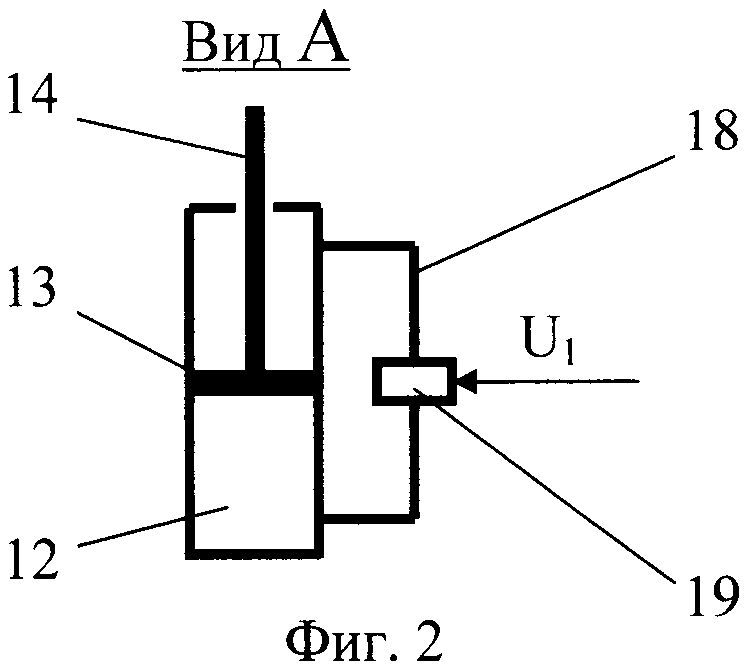
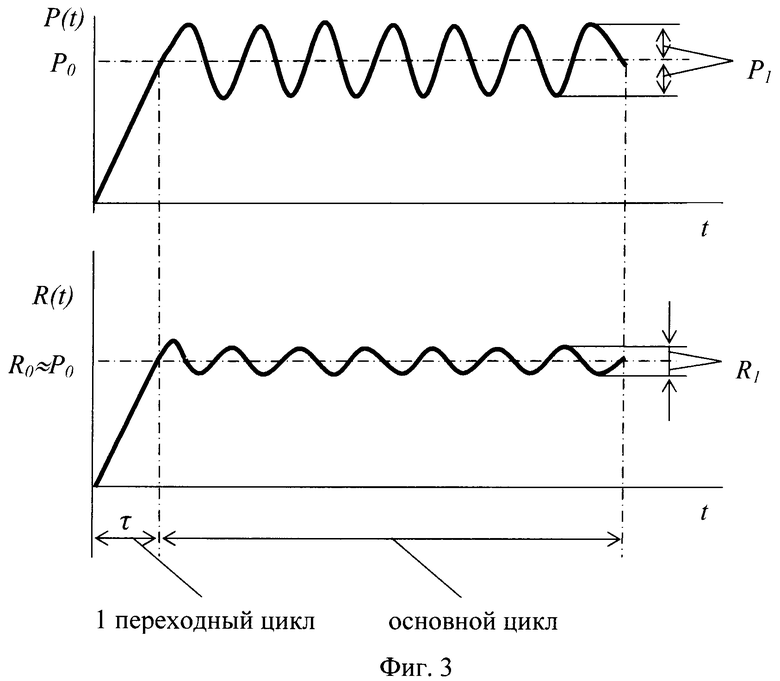
На фиг.1 изображен общий вид виброизолятора; на фиг.2 - гидравлический цилиндр с поршнем и штоком, а также канал со встроенным первым электроклапаном (вид А); на фиг.3 - график силового воздействия (а) и график динамической нагрузки (реакции), воспринимаемой вторым основанием (б).
Виброизолятор содержит первое основание 1, второе основание 2, несущий упругий элемент 3 и демпфер 4, закрепленные между первым и вторым основаниями 1, 2, корректор жесткости 5, электромагнит 6, блок управления 7 и датчик перемещения 8, установленный на первом основании 1 и подключенный к входу блока управления 7.
Демпфер 4 выполнен в виде гофрированного цилиндра 9, в торце которого установлен дроссель 10 и встроен второй электроклапан 11.
Корректор жесткости 5 состоит из гидравлического цилиндра 12 с поршнем 13 и штоком 14, двух пружин 15, 16 и П-образной рамы 17, которая закрепляется на втором основании 2.
Над- и подпоршневые полости гидравлического цилиндра 12 соединены каналом 18 со встроенным первым электроклапаном 19. Шток 14 шарнирно закреплен на первом основании 1. Пружины 15, 16 предварительно сжаты, и их концы шарнирно закреплены на корпусе гидравлического цилиндра 12 и на П-образной раме 17.
Первый электроклапан 19 подключен к первому выходу блока управления 7. Второй электроклапан 11 подключен ко второму выходу блока управления 7.
Электромагнит 6 закреплен на П-образной раме 17 и подключен к третьему выходу блока управления 7. Сердечник 20 электромагнита 6 соединен посредством стержня 21 с корпусом гидравлического цилиндра 12.
Первое основание 1 предназначено для связи с источником динамических нагрузок 22, а второе основание 2 предназначено для связи с объектом 23.
Виброизолятор работает следующим образом.
Источник динамических нагрузок 22 создает силовое воздействие
где Р0 - пороговое значение силы; Р1 - амплитуда периодической составляющей силы; ω - частота; τ - длительность переходного цикла.
Данное силовое воздействие вызывает перемещение первого основания 1. При этом датчик перемещения 8 генерирует электрический сигнал U0, который подается на вход блока управления 7. Если силовое воздействие отсутствует, то первое основание 1 не перемещается, и сигнал U0=0.
Блок управления 7 формирует управляющие сигналы
Сигналы U1, U2, U3 подаются соответственно на первый электроклапан 19, второй электроклапан 22 и электромагнит 6.
Если силовое воздействие отсутствует и сигнал U0=0, то сигналы U1=0, U2=0, U3=U30.
Реализуется ждущий режим работы виброизолятора.
Первый электроклапан 19 обесточен (U1=0) и открывает канал 18, соединяющий полости гидравлического цилиндра 12.
Второй электроклапан 11 обесточен (U2=0) и исключает перетекание через него воздуха из окружающей среды в полость гофрированного цилиндра 12 и наоборот.
Под воздействием сигнала U3=U30 электромагнит 6 срабатывает и фиксирует положение гидравлического цилиндра 12 относительно второго основания 2 (сердечник 20, соединенный стержнем 21 с корпусом гидравлического цилиндра 12, втянут в катушку электромагнита 6). При этом пружины 15, 16 корректора жесткости 5 находятся в горизонтальном положении (фиг.1).
На первом переходном цикле, когда силовое воздействие возрастает (P(t)≤P0), выполняются условия U0≠0 и 0<t<τ. Сигналы на выходе блока управления 7 не изменяются, т.е. U1=0, U2=0, U3=U30, и соответственно демпфер 4 остается включенным в работу, а корректор жесткости 5 - выключенным из работы.
Первое основание 1 и шток 14 с поршнем 13 перемещаются вниз.
Электромагнит 6 фиксирует положение гидравлического цилиндра 12 относительно П-образной рамы 17, и пружины 15, 16 остаются в горизонтальном положении. Канал 18 открыт, и при смещении поршня 13 рабочая жидкость свободно перетекает по каналу 18 из одной полости гидравлического цилиндра 12 в другую, не препятствуя соответственно смещению штока 14 и первого основания 1 относительно второго основания 2 (корректор жесткости 5 выключен из работы).
Гофрированный цилиндр 12 сжимается. Давление воздуха в нем повышается, и воздушный поток, проходящий через дроссель 10, создает диссипативную силу, которая уменьшает ускорение первого основания 1 и источника динамических нагрузок 22 (демпфер 4 включен в работу). За счет этого обеспечивается уменьшение силы инерции, которая передается на второе основание 2 и соответственно на объект 23 через несущий упругий элемент 3 и демпфер 4. Соответственно в конце первого переходного цикла динамическая нагрузка (реакция R(t)), воспринимаемая объектом 23, будет практически равной пороговому значению силы R0≈Р0.
На основном цикле, когда силовое воздействие достигает порогового значения (P(t)=P0) и имеет периодическую составляющую P1sin(ωt), выполняются условия U0≠0, t>τ, и на выходе блока управления 7 формируются сигналы U1=U10, U2=
U20, U3=0.
Периодическая составляющая силы вызывает колебания первого основания 1 и источника динамических нагрузок 22.
Под воздействием сигнала U2=U20 второй электроклапан 11 срабатывает и обеспечивает свободное перетекание через него воздуха из окружающей среды в полость гофрированного цилиндра 9 и наоборот. В результате этого демпфер 4 выключается из работы, и через него периодическая составляющая силы не передается на второе основание 2 и соответственно на объект 23.
Под воздействием сигнала U1=U10 первый электроклапан 19 срабатывает и перекрывает канал 18. Рабочая жидкость не перетекает по каналу 18 из одной полости гидравлического цилиндра 12 в другую, и, как следствие, положение поршня 13, штока 14 и гидравлического цилиндра 12 фиксируется относительно первого основания 1.
Одновременно под воздействием сигнала U3=0 электромагнит 6 обесточен, и гидравлический цилиндр 12 освобождается от связи со вторым основанием 2 (имеет возможность перемещаться вместе с сердечником 20 электромагнита 6 и стержнем 21 относительно второго основания 2).
В результате этого гидравлический цилиндр 12 колеблется вместе с первым основанием 1.
Пружины 15, 16 корректора жесткости 5, которые предварительно сжаты, соответственно отклоняются от горизонтального положения и создают компенсационную силу, при которой суммарная жесткость виброизолятора резко уменьшается (корректор жесткости 5 включен в работу). Как следствие, уменьшаются и амплитуды колебаний первого основания 1 и источника динамических нагрузок 22. (Виброзащитные системы с квазинулевой жесткостью. / Под. ред. К.Н.Рагульскиса. - Л.: Машиностроение, вып.7, 1986. - 96 с.)
Поскольку амплитуда периодической составляющей реакции, которая воспринимается вторым основанием 2 и объектом 23, пропорциональна амплитуде колебаний первого основания 1, то ее значение становится на порядок меньше амплитуды периодической составляющей силы, т.е. R1<P1.
Если источник динамических нагрузок 22 перестает генерировать силовое воздействие, то сигнал U0=0, а сигналы U1=0, U2=0, U3=U30.
Как следствие, реализуется ждущий режим работы виброизолятора.
При последующем силовом воздействии описанная последовательность работы виброизолятора повторяется.
Снабжение виброизолятора электромагнитом 6, сердечник 20 которого соединен стержнем 21 с корпусом гидравлического цилиндра 12, а также выполнение демпфера 4 в виде гофрированного цилиндра 9, в торце которого установлен дроссель 10 и встроен второй электроклапан 11, позволяет сократить число переключений корректора жесткости 5. Это становится возможным потому, что пороговое значение силы воспринимается несущим упругим элементом 3, а периодическая составляющая силы компенсируется пружинами 15, 16 корректора жесткости 5, который включается в работу только тогда, когда значение силы достигает порогового значения. При этом демпфер 4 и корректор жесткости 5 работают поочередно - когда демпфер 4 включен в работу, корректор жесткости 5 выключен из работы и наоборот, т.е. через демпфер 4 периодическая составляющая силы не передается на второе основание 2 и соответственно на объект 23.
Это существенно повышает надежность виброизолятора и эффективность защиты объекта 23 от силового воздействия, поскольку снижается интенсивность работы системы управления и обеспечивается минимальная суммарная жесткость несущего упругого элемента 3 и пружин 15, 16 корректора жесткости 5.
Источники информации
1. Авторское свидетельство СССР SU 1462051 A1, F61F 15/04, бюл. №8, 1989 (аналог).
2. Патент на изобретение РФ RU 2234015 C1, F16F 9/56, 9/06, бюл. №22, 2004 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| ВИБРОИЗОЛЯТОР | 2011 |
|
RU2480643C2 |
| АМОРТИЗАТОР | 2002 |
|
RU2234015C1 |
| ДИНАМИЧЕСКИЙ ГАСИТЕЛЬ | 2008 |
|
RU2374520C1 |
| Амортизатор | 1985 |
|
SU1320560A1 |
| СПОСОБ НАСТРОЙКИ РЕЖИМОВ РАБОТЫ ВИБРОЗАЩИТНОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2595733C2 |
| АМОРТИЗАТОР | 2000 |
|
RU2184891C2 |
| Устройство для задания давления | 1990 |
|
SU1795433A1 |
| ВИБРОИЗОЛЯТОР С КВАЗИНУЛЕВОЙ ЖЕСТКОСТЬЮ | 2011 |
|
RU2463497C1 |
| Устройство для гашения колебаний | 2017 |
|
RU2668933C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЖЕСТКОСТИ ВИБРОЗАЩИТНОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2475658C2 |
Изобретение относится к устройствам виброзащитной техники. Виброизолятор содержит первое и второе основания, несущий упругий элемент и демпфер, закрепляемые между основаниями, блок управления, корректор жесткости, датчик перемещения и электромагнит. Демпфер выполнен в виде гофрированного цилиндра, в торце которого установлен дроссель и встроен второй электроклапан. Второй электроклапан подключен ко второму выходу блока управления. Корректор жесткости состоит из гидравлического цилиндра с поршнем и штоком и двух пружин, устанавливаемых внутри П-образной рамы. Над- и подпоршневые полости гидравлического цилиндра соединены каналом со встроенным первым электроклапаном, подключенным к первому выходу блока управления. Шток шарнирно закреплен на первом основании, а концы пружин - на корпусе гидравлического цилиндра и на П-образной раме. Датчик перемещения установлен на первом основании и подключен к входу блока управления. Электромагнит закреплен на П-образной раме и подключен к третьему выходу блока управления. Сердечник электромагнита соединен стержнем с корпусом гидравлического цилиндра. Достигается повышение надежности виброизолятора и эффективности защиты объектов от силового воздействия посредством уменьшения числа переключений корректора жесткости. 3 ил.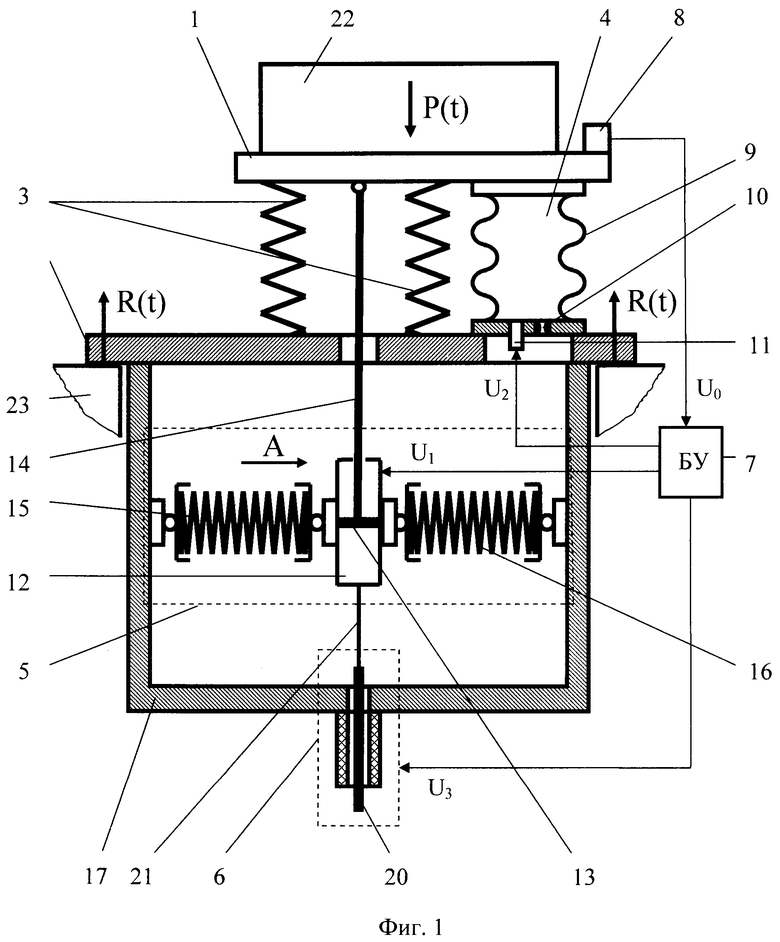
Виброизолятор, содержащий первое основание, предназначенное для связи с источником динамических нагрузок, второе основание, предназначенное для связи с объектом, несущий упругий элемент и демпфер, закрепляемые между основаниями, блок управления, корректор жесткости, состоящий из гидравлического цилиндра с поршнем и штоком и двух пружин, устанавливаемых внутри П-образной рамы, и датчик перемещения, установленный на первом основании и подключенный к входу блока управления, причем над- и подпоршневые полости гидравлического цилиндра соединены каналом со встроенным первым электроклапаном, подключенным к первому выходу блока управления, отличающийся тем, что он дополнительно снабжен электромагнитом, закрепленным на П-образной раме, демпфер выполнен в виде гофрированного цилиндра, в торце которого установлен дроссель и встроен второй электроклапан, причем шток шарнирно закреплен на первом основании, а концы пружин - на корпусе гидравлического цилиндра и на П-образной раме, сердечник электромагнита соединен стержнем с корпусом гидравлического цилиндра, второй электроклапан подключен ко второму выходу блока управления, а электромагнит подключен к третьему выходу блока управления.
| АМОРТИЗАТОР | 2002 |
|
RU2234015C1 |
| RU 2060418 С1, 20.05.1996 | |||
| DE 4015416 A1, 21.11.1991 | |||
| Профилегибочный стан | 1977 |
|
SU691226A1 |

