Предлагаемый динамический гаситель относится к устройствам виброзащитной техники и может использоваться в системах виброзащиты транспортных средств, в частности в подвесках сидений тракторов, дорожных и сельскохозяйственных машин для защиты человека-оператора от действия случайных колебаний.
Известен динамический гаситель [1], предназначенный для снижения интенсивности колебаний объекта, соединенного несущим упругим элементом с основанием, содержащий осциллятор, соединенный упругим элементом с объектом, блок управления и исполнительный орган, электрически связанный с блоком управления.
В данной конструкции динамического гасителя отсутствуют датчики для отслеживания компонент состояния системы виброзащиты - скоростей объекта и основания. Без соответствующей информации динамический гаситель не может формировать оптимальное компенсационное воздействие, обеспечивающее снижение интенсивности колебаний объекта. Оптимальное компенсационное воздействие реализуется только в случае стационарных противофазных колебаний осциллятора и основания, когда амплитуды колебаний осциллятора достигают достаточно большой величины.
Наиболее близким к предлагаемому техническому решению является динамический гаситель [2], предназначенный для снижения интенсивности колебаний объекта, соединенного несущим упругим элементом с основанием, содержащий осциллятор, выполненный в виде массы, связанной с объектом упругим элементом, блок управления, первый датчик скорости, установленный на объекте и подключенный к первому входу блока управления, и исполнительный орган, электрически связанный с выходом блока управления.
Недостатком данного динамического гасителя является то, что компенсационное воздействие формируется без использования информации о компонентах состояния основания. Исполнительный орган, который установлен между объектом и осциллятором, блокирует осциллятор относительно объекта и выключает из работы динамический гаситель на первой и второй резонансных частотах системы, т.е. тогда, когда частота вынужденных колебаний основания совпадает с одной из собственных частот колебаний системы. Поскольку масса объекта намного превышает массу осциллятора, то интенсивность колебаний объекта совместно с осциллятором на первой резонансной частоте уменьшается незначительно. Кроме того, компенсационное воздействие формируется только под действием восстанавливающей силы упругого элемента, т.е. без учета диссипативной силы. Это не позволяет обеспечить необходимое максимальное значение компенсационного воздействия на интервалах движения, где смещение объекта относительно основания мало.
Все это ухудшает качественные показатели данного динамического гасителя как устройства виброзащитной техники.
Задача, на решение которой направлено изобретение, состоит в повышении эффективности виброзащиты объекта за счет формирования динамическим гасителем оптимального компенсационного воздействия как суммы двух компонент - восстанавливающей силы и диссипативной силы, с учетом информации о компонентах состояния системы виброзащиты - скоростей объекта и основания.
Для этого динамический гаситель, предназначенный для снижения интенсивности колебаний объекта, соединенного несущим упругим элементом с основанием, содержащий осциллятор, выполненный в виде массы, связанной с объектом упругим элементом, блок управления, первый датчик скорости, установленный на объекте и подключенный к первому входу блока управления, и исполнительный орган, электрически связанный с выходом блока управления, дополнительно снабжен вторым датчиком скорости, установленным на основании и подключенным ко второму входу блока управления, а исполнительный орган выполнен в виде гидравлического цилиндра с поршнем и штоком, над- и подпоршневые полости гидравлического цилиндра соединены первым каналом со встроенным электроклапаном, электрически связанным с выходом блока управления, и вторым каналом со встроенным дросселем, причем гидравлический цилиндр шарнирно закреплен на объекте, а шток шарнирно закреплен на основании.
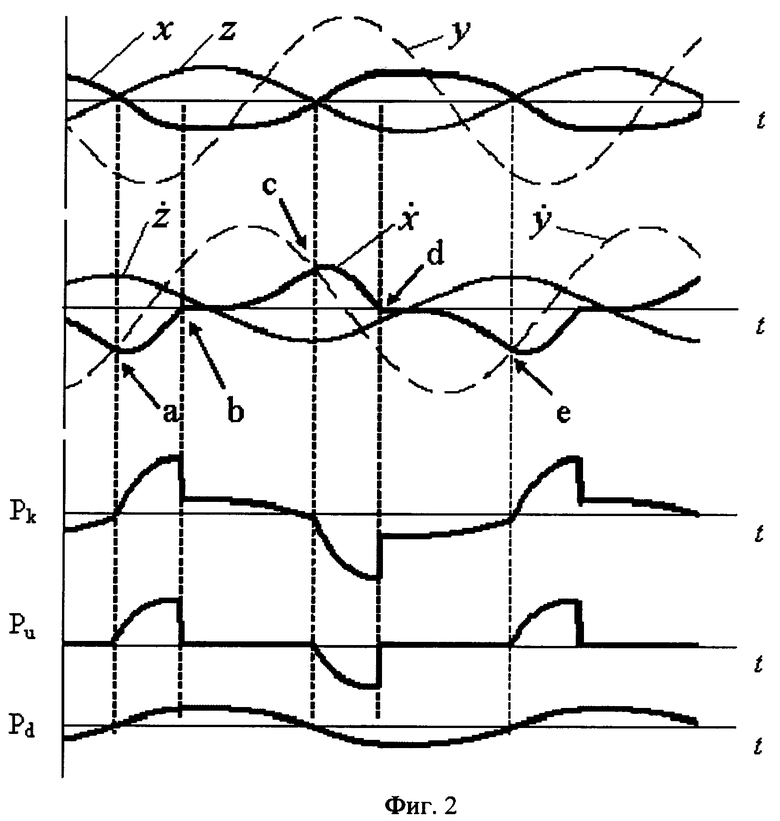
Сущность изобретения поясняется чертежами. На фиг.1 изображен общий вид динамического гасителя, установленного в системе виброзащиты: объект - несущий упругий элемент - основание; на фиг.2 показаны графики колебаний объекта и основания при кинематическом возмущении, а также графики компенсационных воздействий.
Динамический гаситель содержит осциллятор 1, исполнительный орган 2, блок управления 3, датчики скорости 4, 5 и кронштейны 6, 7.
Осциллятор 1 выполнен в виде массы 8, соединенной упругим элементом 9 с кронштейном 6.
Исполнительный орган 2 выполнен в виде гидравлического цилиндра 10 с поршнем 11 и штоком 12. Над- и подпоршневые полости гидравлического цилиндра 10 соединены каналами 13 и 14. В канал 13 встроен электроклапан 15, а в канал 14 встроен дроссель 16. Гидравлический цилиндр 10 шарнирно закреплен на кронштейне 7, а шток 12 шарнирно закреплен на кронштейне 6.
Датчик скорости 4 установлен на кронштейне 6 и подключен к первому входу блока управления 3. Датчик скорости 5 установлен на кронштейне 7 и подключен ко второму входу блока управления 3. Электроклапан 15 электрически связан с выходом блока управления 3.
Кронштейн 6 закреплен на объекте 17, а кронштейн 7 - на основании 18. Объект 17 соединен с основанием 18 посредством несущего упругого элемента 19.
В положении статического равновесия объекта 17 на несущем упругом элементе 19 или при равенстве смещений объекта 17 и основания 18 (когда х-у=0) поршень 11 находится в средней части гидравлического цилиндра 10.
На интервалах движения а…с и с…е объект 17 и масса 8 осциллятора 1 движутся в противофазе. При этом восстанавливающая сила упругого элемента 9 формирует компенсационное воздействие Pd, которое через кронштейн 6 передается на объект 17 и стремится сместить его к положению статического равновесия.
На интервале движения а…с объект 17 и основание 18 сближаются друг с другом, и их относительная скорость отрицательна  , а на интервале движения с…е они удаляются друг от друга, и их относительная скорость положительна
, а на интервале движения с…е они удаляются друг от друга, и их относительная скорость положительна  .
.
Датчик скорости 4 преобразует колебания кронштейна 6 в электрический сигнал u1, который пропорционален скорости объекта 17  . Сигнал u1 подается на первый вход блока управления 3.
. Сигнал u1 подается на первый вход блока управления 3.
Датчик скорости 5 преобразует колебания кронштейна 7 в электрический сигнал u2, который пропорционален скорости основания 18  . Сигнал u2 подается на второй вход блока управления 3.
. Сигнал u2 подается на второй вход блока управления 3.
При помощи блока управления 3 сигналы u1 и u2 сравниваются по знаку и величине. Полученная информация в виде сигнала
подается с выхода блока управления 3 на электроклапан 15.
На интервале а…b скорость объекта 17  , а относительная скорость
, а относительная скорость  , поэтому блок управления 3 формирует сигнал u=u0, под действием которого электроклапан 15 перекрывает канал 13 и включает в работу исполнительный орган 2. Рабочая жидкость гидравлического цилиндра 10 выдавливается из его подпоршневой полости в надпоршневую полость по каналу 14. При этом дроссель 16, встроенный в канал 14, формирует диссипативную силу, которая передается через поршень 11, шток 12 и кронштейн 6 на объект 17. Данная диссипативная сила, как компенсационное воздействие Pu, направлена против движения объекта 17 и уменьшает его скорость
, поэтому блок управления 3 формирует сигнал u=u0, под действием которого электроклапан 15 перекрывает канал 13 и включает в работу исполнительный орган 2. Рабочая жидкость гидравлического цилиндра 10 выдавливается из его подпоршневой полости в надпоршневую полость по каналу 14. При этом дроссель 16, встроенный в канал 14, формирует диссипативную силу, которая передается через поршень 11, шток 12 и кронштейн 6 на объект 17. Данная диссипативная сила, как компенсационное воздействие Pu, направлена против движения объекта 17 и уменьшает его скорость  по абсолютной величине.
по абсолютной величине.
Поскольку на интервале движения а…b смещение х и скорость  объекта 17 отрицательны, то компенсационные воздействия Pd и Pu складываются и определяют оптимальное компенсационное воздействие Pk=Pd+Pu, направленное вверх.
объекта 17 отрицательны, то компенсационные воздействия Pd и Pu складываются и определяют оптимальное компенсационное воздействие Pk=Pd+Pu, направленное вверх.
На интервале b…с скорость объекта 17  , а относительная скорость
, а относительная скорость  , поэтому блок управления 3 формирует сигнал u=0, под действием которого электроклапан 15 обесточен и открывает канал 13. Рабочая жидкость гидравлического цилиндра 10 свободно перетекает из его подпоршневой полости в надпоршневую полость по каналу 13. Как следствие, исполнительный орган 2 выключен из работы, и компенсационное воздействие Pu=0. Таким образом, на интервале движения b…с формируется компенсационное воздействие Pk=Pd, направленное вверх.
, поэтому блок управления 3 формирует сигнал u=0, под действием которого электроклапан 15 обесточен и открывает канал 13. Рабочая жидкость гидравлического цилиндра 10 свободно перетекает из его подпоршневой полости в надпоршневую полость по каналу 13. Как следствие, исполнительный орган 2 выключен из работы, и компенсационное воздействие Pu=0. Таким образом, на интервале движения b…с формируется компенсационное воздействие Pk=Pd, направленное вверх.
На интервале c…d скорость объекта 17 , а относительная скорость  , поэтому блок управления 3 формирует сигнал u=u0, под действием которого электроклапан 15 перекрывает канал 13 и включает в работу исполнительный орган 2. Рабочая жидкость гидравлического цилиндра 10 выдавливается из его подпоршневой полости в надпоршневую полость по каналу 14. При этом дроссель 16, встроенный в канал 14, формирует диссипативную силу, которая передается через поршень 11, шток 12 и кронштейн 6 на объект 17. Данная диссипативная сила, как компенсационное воздействие Pu, направлена против движения объекта 17 и уменьшает его скорость
, поэтому блок управления 3 формирует сигнал u=u0, под действием которого электроклапан 15 перекрывает канал 13 и включает в работу исполнительный орган 2. Рабочая жидкость гидравлического цилиндра 10 выдавливается из его подпоршневой полости в надпоршневую полость по каналу 14. При этом дроссель 16, встроенный в канал 14, формирует диссипативную силу, которая передается через поршень 11, шток 12 и кронштейн 6 на объект 17. Данная диссипативная сила, как компенсационное воздействие Pu, направлена против движения объекта 17 и уменьшает его скорость  по абсолютной величине.
по абсолютной величине.
Поскольку на интервале движения c…d смещение х и скорость  объекта 17 положительны, то компенсационные воздействия Pd и Pu складываются и определяют оптимальное компенсационное воздействие Pk=Pd+Pu, направленное вниз.
объекта 17 положительны, то компенсационные воздействия Pd и Pu складываются и определяют оптимальное компенсационное воздействие Pk=Pd+Pu, направленное вниз.
На интервале d…e скорость объекта 17 , а относительная скорость , поэтому блок управления 3 формирует сигнал u=0, под действием которого электроклапан 15 обесточен и открывает канал 13. Рабочая жидкость гидравлического цилиндра 10 свободно перетекает из его подпоршневой полости в надпоршневую полость по каналу 13. Как следствие, исполнительный орган 2 выключен из работы, и компенсационное воздействие Pu=0. Таким образом, на интервале движения d…e формируется компенсационное воздействие Pk=Pd, направленное вниз.
При дальнейшем движении объекта 17 и основания 18 описанная последовательность работы динамического гасителя повторяется.
Описанная последовательность работы исполнительного органа 2 совместно с осциллятором 1, при наличии информации о компонентах состояния системы виброзащиты - скоростей объекта 17 и основания 18, обеспечивает формирование динамическим гасителем компенсационного воздействия как суммы восстанавливающей силы упругого элемента 9 и диссипативной силы, реализуемой дросселем 16. Поскольку неблагоприятные ситуации, когда диссипативная сила увеличивала бы скорость объекта 17, исключаются, то данное компенсационное воздействие является оптимальным и существенно повышает эффективность виброзащиты.
Данное устройство позволяет повысить эффективность виброзащиты объекта, улучшить качественные показатели виброзащитных технологий.
Источники информации
1. Авторское свидетельство 1469223, кл. F16F 15/03, 1989.
2. Описание полезной модели к патенту РФ 48604, кл. F16F 15/00 - прототип.
Заявитель: Государственное образовательное учреждение высшего профессионального образования «Орловский государственный технический университет» (ОрелГТУ)
| название | год | авторы | номер документа |
|---|---|---|---|
| АМОРТИЗАТОР | 2003 |
|
RU2247881C1 |
| ГИДРАВЛИЧЕСКИЙ ДЕМПФЕР | 1998 |
|
RU2196262C2 |
| ВИБРОИЗОЛЯТОР | 2008 |
|
RU2382254C1 |
| АМОРТИЗАТОР | 2000 |
|
RU2184891C2 |
| ГИДРАВЛИЧЕСКИЙ ДЕМПФЕР | 1999 |
|
RU2165550C2 |
| ВИБРОИЗОЛЯТОР | 2011 |
|
RU2480643C2 |
| Устройство управления вибрационным полем технологической машины | 2017 |
|
RU2689901C2 |
| АМОРТИЗАТОР | 2002 |
|
RU2234015C1 |
| СПОСОБ УПРАВЛЕНИЯ И ИЗМЕНЕНИЯ ДИНАМИЧЕСКОГО СОСТОЯНИЯ ВИБРОЗАЩИТНОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2018 |
|
RU2696062C1 |
| Способ динамического гашения колебаний объекта защиты и устройство для его осуществления | 2017 |
|
RU2654890C1 |
Изобретение относится к устройствам виброзащитной техники и предназначено для снижения интенсивности колебаний объекта, соединенного несущим упругим элементом с основанием. Гаситель содержит осциллятор, блок управления, первый и второй датчики скорости, исполнительный орган, электрически связанный с выходом блока управления. Осциллятор выполнен в виде массы, связанной с объектом упругим элементом. Первый датчик скорости установлен на объекте и подключен к первому входу блока управления. Второй датчик скорости установлен на основании и подключен ко второму входу блока управления. Исполнительный орган выполнен в виде гидравлического цилиндра с поршнем и штоком. Надпоршневые и подпоршневые полости гидравлического цилиндра соединены первым каналом со встроенным электроклапаном и вторым каналом со встроенным дросселем. Электроклапан электрически связан с выходом блока управления. Гидравлический цилиндр шарнирно закреплен на объекте. Шток шарнирно закреплен на основании. Достигается повышение эффективности виброзащиты объекта. 2 ил.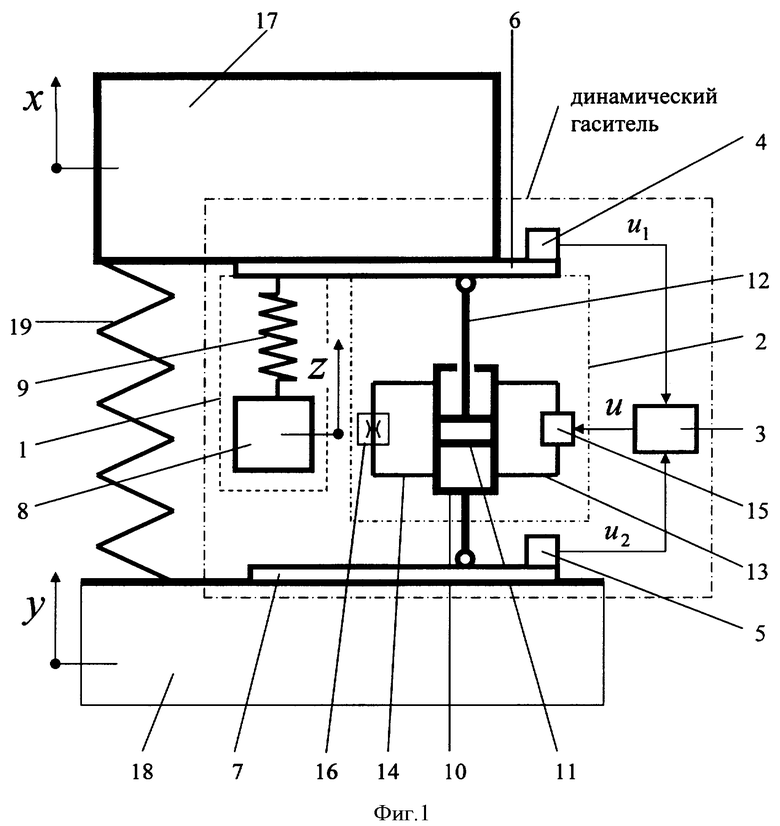
Динамический гаситель, предназначенный для снижения интенсивности колебаний объекта, соединенного несущим упругим элементом с основанием, содержащий осциллятор, выполненный в виде массы, связанной с объектом упругим элементом, блок управления, первый датчик скорости, установленный на объекте и подключенный к первому входу блока управления, и исполнительный орган, электрически связанный с выходом блока управления, отличающийся тем, что он дополнительно снабжен вторым датчиком скорости, установленным на основании и подключенным ко второму входу блока управления, а исполнительный орган выполнен в виде гидравлического цилиндра с поршнем и штоком, над- и подпоршневые полости гидравлического цилиндра соединены первым каналом со встроенным электроклапаном, электрически связанным с выходом блока управления, и вторым каналом со встроенным дросселем, причем гидравлический цилиндр шарнирно закреплен на объекте, а шток шарнирно закреплен на основании.
| Радиоприемник с автоматическим подавлением шумов при настройке | 1935 |
|
SU48604A1 |
| ДВУХКАМЕРНЫЙ ПНЕВМАТИЧЕСКИЙ АМОРТИЗАТОР | 1998 |
|
RU2139458C1 |
| US 4730816 A, 15.03.1988 | |||
| DE 4015416 A1, 21.11.1991 | |||
| Профилегибочный стан | 1977 |
|
SU691226A1 |

