Изобретение относится к электромеханическим системам транспортных средств и может быть использовано при разработке рулевых механизмов автомобилей.
Известны способ и устройство, патент США 5428537, кл. В 62 D 5/04, 1995, в котором для формирования сигнала управления электродвигателем электромеханического усилителя рулевого механизма используется информация о первой и второй производных регулируемой переменной.
Недостатком этого устройства является сложность его практической реализации, обусловленная необходимостью измерять или вычислять скорость и ускорение регулируемой переменной.
Наиболее близким техническим решением является устройство, патент США 5482129, кл. B 62 D5/04, 1996, (прототип), в котором для формирования сигнала управления электродвигателем электромеханического усилителя рулевого механизма используется пропорционально-интегральный регулятор тока (ПИ-регулятор), коэффициенты которого выбираются в зависимости от скорости движения автомобиля.
Недостатком этого устройства является отсутствие дифференциальной составляющей в управлении, т.к. рулевой механизм с электромеханическим усилителем с точки зрения теории автоматического управления является объектом второго порядка (см. [1], стр. 27 ), а следовательно, при этом требуется не "ПИ-регулятор", а "ПИД-регулятор" (см. [2], стр. 64, 65 ). Кроме того, необходимо в максимально возможной степени скомпенсировать инерционность электродвигателя как источника момента, т.е. чтобы частотные свойства контура регулирования тока в отношении контура регулирования момента (ПИД-регулятор) были как можно выше (отличались более чем на порядок), т.к. только при этом условии процессы регулирования в них можно считать независимыми и рассматривать по отдельности. Это обстоятельство требует синтеза регулятора тока, обладающего максимальным быстродействием при отсутствии перерегулирования.
Решение технической задачи направлено на улучшение качества регулирования и упрощение схемы.
Для решения технической задачи в известный сервопривод рулевого механизма автомобиля, содержащий: электродвигатель; датчик тока электродвигателя; датчик момента, прикладываемого водителем к рулевому колесу, выход которого подключен к первому входу первого суммирующего элемента; пропорциональный и интегральный усилители, первые входы которых подключены к выходу первого суммирующего элемента, а вторые входы через первый и второй формирователи пропорционального и интегрального коэффициентов усиления подключены к выходу датчика скорости автомобиля, при этом выходы пропорционального и интегрального усилителей подключены соответственно к первому и второму входам второго суммирующего элемента, выход которого подключен ко входу регулятора тока электродвигателя, введены: первый дифференциальный усилитель, первый вход которого подключен к выходу первого суммирующего элемента, второй вход через вновь введенный третий формирователь коэффициента усиления подключен к выходу датчика скорости автомобиля, а выход подключен к третьему входу второго суммирующего элемента; второй дифференциальный усилитель, вход которого подключен к выходу датчика момента, а выход подключен ко второму входу первого суммирующего элемента; формирователь заданного значения момента на рулевом колесе, вход которого подключен к выходу датчика скорости автомобиля, а выход подключен к третьему входу первого суммирующего элемента; силовой преобразователь, к выходу которого подключены последовательно соединенные электродвигатель и датчик тока электродвигателя, а ко входу подключен выход регулятора тока электродвигателя, при этом регулятор тока электродвигателя выполнен имеющим второй вход, подключенный к выходу датчика тока электродвигателя.
Регулятор тока электродвигателя, в составе описанного сервопривода, является оригинальным техническим решением, т.к. содержит: элемент сравнения, первый и второй входы которого являются соответственно первым и вторым входами регулятора тока электродвигателя; компаратор с гистерезисной характеристикой, ширина петли которой зависит от сигнала на втором входе компаратора, и регулятор величины пульсаций, выполненный в виде резистивного делителя, вход которого подключен к первому входу регулятора тока электродвигателя, а выход - ко второму входу компаратора, при этом первый вход компаратора подключен к выходу элемента сравнения, а выход компаратора является выходом регулятора тока электродвигателя.
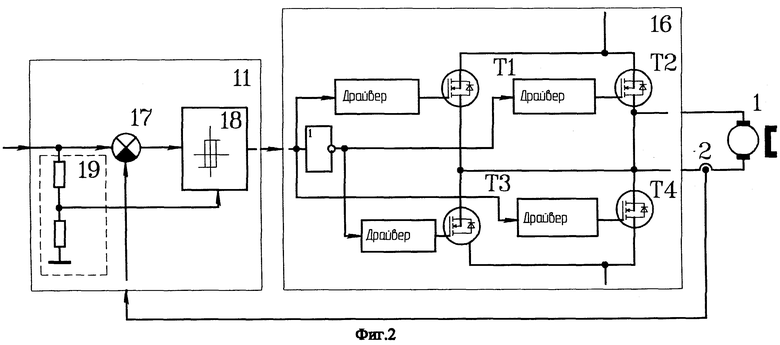
На фиг.1. схематично показано предлагаемое устройство, на фиг.2. схематично показана практическая реализация регулятора тока электродвигателя.
Сервопривод рулевого механизма автомобиля содержит: электродвигатель 1; датчик 2 тока электродвигателя; датчик 3 момента, прикладываемого водителем к рулевому колесу, выход которого подключен к первому входу первого суммирующего элемента 4; пропорциональный 5 и интегральный 6 усилители, первые входы которых подключены к выходу первого суммирующего элемента 4, а вторые входы через первый 7 и второй 8 формирователи пропорционального и интегрального коэффициентов усиления подключены к выходу датчика 9 скорости автомобиля, при этом выходы пропорционального 5 и интегрального 6 усилителей подключены соответственно к первому и второму входам второго суммирующего элемента 10, выход которого подключен ко входу регулятора 11 тока электродвигателя; первый дифференциальный усилитель 12, первый вход которого подключен к выходу первого суммирующего элемента 4, второй вход через вновь введенный третий формирователь 13 коэффициента усиления подключен к выходу датчика 9 скорости автомобиля, а выход подключен к третьему входу второго суммирующего элемента 10; второй дифференциальный усилитель 14, вход которого подключен к выходу датчика 3 момента, а выход подключен ко второму входу первого суммирующего элемента 4; формирователь 15 заданного значения момента на рулевом колесе, вход которого подключен к выходу датчика 9 скорости автомобиля, а выход подключен к третьему входу первого суммирующего элемента 4; силовой преобразователь 16, к выходу которого подключены последовательно соединенные электродвигатель 1 и датчик 2 тока электродвигателя, а ко входу подключен выход регулятора 11 тока электродвигателя, при этом регулятор тока электродвигателя выполнен имеющим второй вход, подключенный к выходу датчика 2 тока электродвигателя.
Регулятор 11 тока электродвигателя содержит элемент 17 сравнения, первый и второй входы которого являются соответственно первым и вторым входами регулятора 11 тока электродвигателя; компаратор 18 с гистерезисной характеристикой, ширина петли которой зависит от сигнала на втором входе компаратора 18, и регулятор 19 величины пульсаций, выполненный в виде резистивного делителя, вход которого подключен к первому входу регулятора 11 тока электродвигателя, а выход - ко второму входу компаратора 18, при этом первый вход компаратора 18 подключен к выходу элемента 17 сравнения, а выход компаратора 18 является выходом регулятора 11 тока электродвигателя.
Сервопривод работает следующим образом. Сигнал с выхода датчика 3 момента поступает на первый вход первого суммирующего элемента 4 и на вход второго дифференциального усилителя 14, который служит для компенсации фазового сдвига выходного сигнала датчика 3 момента, обусловленного его внутренними инерционностями. Из суммарной величины сигналов, поступивших на первый и второй входы первого суммирующего элемента 4, вычитается сигнал, поступающий с выхода формирователя 15 заданного значения момента на рулевом колесе. Этот сигнал формируется в зависимости от текущего значения скорости движения автомобиля. Разностный сигнал с выхода первого суммирующего элемента 4 поступает на входы каждого из усилителей "ПИД-регулятора" (усилители 5, 6 и 12). Коэффициенты усиления по каждой из компонент "ПИД-регулятора" также формируются в зависимости от текущего значения скорости, потому что динамические свойства рулевого механизма как объекта управления существенно зависят от скорости движения автомобиля. Результирующий сигнал (например, положительный) с выхода второго суммирующего элемента 10 поступает на вход регулятора 11 тока электродвигателя, при этом компаратор 18 переключится в верхнее положение, что приведет к включению первого Т1 и четвертого Т4 транзисторов силового преобразователя 16. Сигнал на инверсном входе элемента 17 сравнения начинает возрастать в соответствии с возрастанием тока в якоре электродвигателя 1, что вызывает уменьшение сигнала на входе компаратора 18. В момент, когда ток в якоре электродвигателя 1 достигнет значения, при котором сигнал на входе компаратора 18 становится отрицательным и по величине равным сигналу, поступающему с регулятора 19 величины пульсаций, выходное напряжение компаратора 18 сменится на отрицательное, что приведет к выключению первого Т1, четвертого Т4 транзисторов и включению второго Т2 и третьего Т3 транзисторов силового преобразователя 16. Ток в якоре электродвигателя 1 начнет уменьшаться, протекая через соответствующие диоды силового преобразователя 16. Когда ток в якоре электродвигателя 1 спадет настолько, что сигнал на входе компаратора 18 станет положительным и равным по величине напряжению, поступающему с регулятора 19 величины пульсаций, выходное напряжение компаратора 18 сменится на положительное и повторится описанный процесс, приводящий к возрастанию тока в якоре электродвигателя 1. Таким образом, ток в якоре электродвигателя 1 пульсирует относительно среднего значения, пропорционального величине результирующего сигнала на выходе второго суммирующего элемента 10, причем относительная величина пульсаций остается постоянной и не зависит от величины этого сигнала, скорости вращения электродвигателя 1 и величины напряжения бортовой сети автомобиля. То же относится и к среднему значению тока якоря, а следовательно, и к величине момента, развиваемого электродвигателем 1.
Таким образом, при работе устройства, использующего регулятор 11 тока электродвигателя, содержащий компаратор 18 с изменяемой шириной петли гистерезиса, обеспечивается полная независимость момента, развиваемого электродвигателем 1 от величины напряжения бортовой сети автомобиля и принципиальное отсутствие перерегулирования среднего значения момента при максимальном быстродействии.
Источники информации
1. "Automotive Engineering", 1998, 9, с.25-31.
2. Слежановский О.В. и др. "Системы подчиненного регулирования электроприводов переменного тока с вентильными преобразователями", - М.: Энергоатомиздат, 1983. -256 с.
Изобретение относится к рулевому управлению транспортного средства. Сервопривод рулевого механизма автомобиля содержит электродвигатель постоянного тока, датчик момента, прикладываемого водителем к рулевому колесу, датчик скорости движения автомобиля, датчик и регулятор тока электродвигателя. Отличие состоит в том, что для улучшения качества регулирования и упрощения схемы регулятор момента выполнен в виде ПИД-регулятора, коэффициенты усиления которого зависят от скорости движения автомобиля, а регулятор тока выполнен релейным, на базе компаратора ширина петли гистерезиса которого пропорциональна заданному значению тока электродвигателя. Технический результат заключается в улучшении качества регулирования и упрощении схемы. 2 с.п. ф-лы, 2 ил.
| US 5482129 A, 09.01.1996 | |||
| НОВЫЙ СПОСОБ ПОЛУЧЕНИЯ N-АЦЕТИЛ-(L)-4-ЦИАНОФЕНИЛАЛАНИНА АС-(L)-PHE(4-CN)-OH И N-АЦЕТИЛ-(L)-N-АМИДИНОФЕНИЛАЛАНИН-ЦИКЛОГЕКСИЛ-ГЛИЦИН-β-(3-N-МЕТИЛПИРИДИН ИЯ)-АЛАНИНА АС-(L)-PАPH-СHG-РAL МE(3)-NH | 1996 |
|
RU2170764C2 |
| ПОВЕРХНОСТНЫЙ ПРИВОД ПОГРУЖНОГО ВИНТОВОГО НАСОСА | 1998 |
|
RU2145678C1 |
| СПОСОБ ДИАГНОСТИКИ ПОДКЛЮЧИЧНО-ПОЗВОНОЧНОГО СТИЛ-СИНДРОМА | 2014 |
|
RU2570043C1 |

